运算放大器的频率补偿 共42页
- 格式:ppt
- 大小:1.08 MB
- 文档页数:42
多级运算放大器的频率补偿分析Bo yang 2009-5-3 由于单级运算放大器cascode不能满足低电压的要求,而且短沟道效应和深亚微米CMOS的本征增益下降,所以要使用多级放大,这样就涉及到频率补偿的问题。
大部分的频率补偿拓扑结构都是采用极点分离和零极点抵消技术(使用电容和电阻)。
对于两级运算放大器而言这样的补偿无论是在理论分析还是在实际电路中都是可行的,但是对于多级放大器而言,要考虑的因素很多(电容面积,功耗,压摆率等)。
而且理论的分析不一定都适用于实际的电路。
所以对于多级放大器的频率补偿,这里给出了几种拓扑结构。
由于系统结构,传输函数都很复杂,所以在分析这些拓扑结构之前先给出一些假设条件:1):假设每一级的增益都远远大于1;2):假设负载电容和补偿电容都大于寄生集总电容;3):每一级之间的寄生电容忽略不计。
以上这些假设都是很容易满足,而且在大部分电路中都是满足这些条件条件的。
一single stage对于单级放大器而言,其频率响应比较好,只有一个左半平面得极点,没有零点,所以整个系统是稳定的。
极点位置为:。
其增益带宽积为GBW=gmL/CL.所以可以通过增大跨导,减小输出电容的方式来增大带宽。
实际上它的相位裕度没有90度,是因为存在着寄生的零极点。
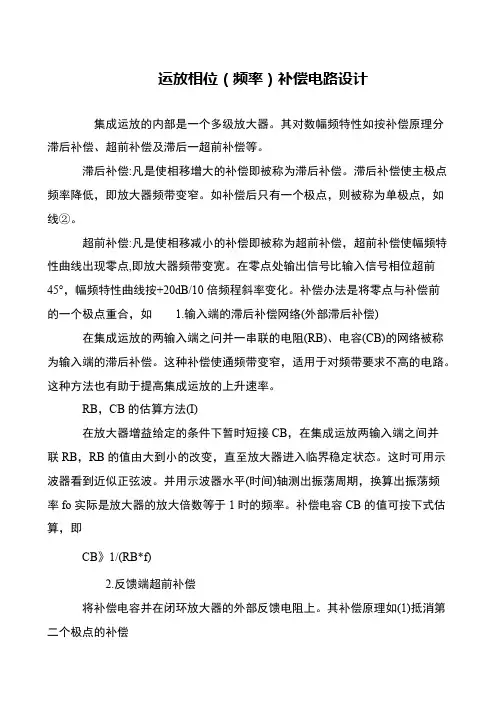
二这些寄生的零极点于信号路径上的偏置电流和器件的尺寸有关,所以单位增益带宽也不能无限制的增加,而是等于寄生最小极点或者零点的一半为比较合适的,而且大的偏置电流和小的器件尺寸对于稳定性是必要的二 two stage对于两级的运放,就是采用简单的米勒补偿(SMC)。
其补偿的结构如下所示:对于这种结构的传递函数可以表述如下从传递函数中很容易知道零极点位置。
其中一个右半平面得零点和两个极点。
为了保证系统稳定性,次极点和零点要在比单位增益频率大的地方,这样就要求Cm很大并把主极点推的很低,这样增益带宽积就要减小,要保持同样的速度即单位增益带宽,就要求大的功耗(增加跨导)通常选择次极点在单位增益频率两倍的位置。
运放相位(频率)补偿电路设计
集成运放的内部是一个多级放大器。
其对数幅频特性如按补偿原理分滞后补偿、超前补偿及滞后一超前补偿等。
滞后补偿:凡是使相移增大的补偿即被称为滞后补偿。
滞后补偿使主极点频率降低,即放大器频带变窄。
如补偿后只有一个极点,则被称为单极点,如线②。
超前补偿:凡是使相移减小的补偿即被称为超前补偿,超前补偿使幅频特性曲线出现零点,即放大器频带变宽。
在零点处输出信号比输入信号相位超前45°,幅频特性曲线按+20dB/10倍频程斜率变化。
补偿办法是将零点与补偿前
的一个极点重合,如 1.输入端的滞后补偿网络(外部滞后补偿)
在集成运放的两输入端之问并一串联的电阻(RB)、电容(CB)的网络被称为输入端的滞后补偿。
这种补偿使通频带变窄,适用于对频带要求不高的电路。
这种方法也有助于提高集成运放的上升速率。
RB,CB的估算方法(I)
在放大器增益给定的条件下暂时短接CB,在集成运放两输入端之间并
联RB,RB的值由大到小的改变,直至放大器进入临界稳定状态。
这时可用示波器看到近似正弦波。
并用示波器水平(时间)轴测出振荡周期,换算出振荡频
率fo实际是放大器的放大倍数等于1时的频率。
补偿电容CB的值可按下式估算,即
CB》1/(RB*f)
2.反馈端超前补偿
将补偿电容并在闭环放大器的外部反馈电阻上。
其补偿原理如(1)抵消第二个极点的补偿。
运算放大器的相位补偿
运算放大器的相位补偿是一种技术,用于调整运算放大器的频率响应,以获得所需的频率特性。
相位补偿可以通过以下几种方法实现:
1.超前补偿:通过在运算放大器的反馈回路中加入超前补偿网络,可以减小相位滞后,提高电路的稳定性。
超前补偿网络通常由电阻和电容组成,可以调整电阻和电容的值,以获得所需的频率特性。
2.滞后补偿:通过在运算放大器的反馈回路中加入滞后补偿网络,可以增大相位滞后,从而降低电路的增益,提高电路的稳定性。
滞后补偿网络通常由电阻和电容组成,可以调整电阻和电容的值,以获得所需的频率特性。
3.超前-滞后补偿:通过在运算放大器的反馈回路中同时加入超前补偿网络和滞后补偿网络,可以同时调整相位超前和相位滞后,以获得更好的频率特性。
超前-滞后补偿通常用于复杂的应用场景,需要仔细调整各个参数。
在进行相位补偿时,需要注意以下几点:
1.补偿网络的元件值需要精确匹配,以确保获得所需的频率特性。
2.补偿网络的连接方式需要正确,以避免对电路造成不良影响。
3.补偿网络的位置需要合理选择,以确保对电路的频率响应进行有效的调整。
总之,相位补偿是运算放大器设计中非常重要的技术之一,可以有效地调整电路的频率响应,以获得所需的频率特性。
在实际应用中,需要根据具体的应用场景选择合适的补偿方法,并进行仔细的参数调整。
运放补偿虽然很常见,但有时候也极具挑战性,尤其是在要求和约束条件超过设计师控制的情况下,设计师必须选择一种最优补偿技术之时。
也许极具挑战性的原因之一是一般文献资料更多地专注于不同补偿技术之间的区别而不是相似性。
除了关注概念上的不同点外,还要关注相似点,这是非常明智的,只有这样才能更好地理解明显不同的技术和概念之间的紧密关系。
为了达到这个目标,本文首先讨论了运放的少量几个确定因素,最终逐步过渡到电路中经常使用但少有人理解的补偿技术。
本文还简要介绍了补偿网络的严格定义,并集中讨论了文献中出现的可能冲突。
前馈增益:相对于哪个节点?在讨论运放补偿之前,首先搞清楚运放的两种最基本配置很重要,即同相(图1A)和反相(图1B)。
已有大量文献资料介绍过这两种配置的闭环增益,并强调了闭环传输函数间的区别。
图1A:典型的同相配置。
图1B:典型的反相配置。
图1C:反相配置的等效同相版本。
为了方便理解两种配置的前馈增益之间的区别,这里给出了分别对应同相和反相配置的公式1.a和1.b。
有人可能会问,为什么反相配置(A INV)的前馈增益不同于同相配置(A NINV),而事实上两种配置使用的是相同的运放。
让我们首先看看两种配置实际上有多相似,然后说明前馈增益的纯数学表达式为何不同。
图1B中所示的反相配置可以转化为图1C所示的等效同相配置。
这种转换是确定同相配置要求的输入后会产生与反相配置相同输出的结果。
图2A和图2B分别对应图1A和图1C的框图表示法。
注意图2A和图2B之间的相似性。
这两张图表明,当从减法模块向输出观察时,两种配置是完全相同的。
减法模块建模的是运放两个输入端的相减。
在反相配置框图(图2B)中,输入信号(-X INV)先乘以Z F/(Z F+Z G)因子,然后到达减法模块输入端,命名为X INV,i。
在图2A和图2B的两个框图之间,当严格相对于减法模块输入或运放输入观察时,前馈增益和反馈因子完全相同,两种配置的区别仅是相对输入信号观察时输入信号的数学转换。
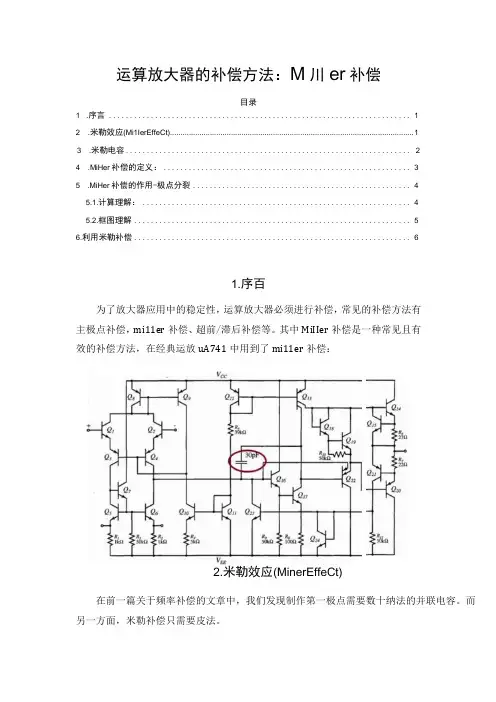
运算放大器的补偿方法:M川er补偿目录1 .序言 (1)2 .米勒效应(Mi1IerEffeCt) (1)3 .米勒电容 (2)4 .MiHer补偿的定义: (3)5 .MiHer补偿的作用-极点分裂 (4)5.1.计算理解: (4)5.2.框图理解 (5)6.利用米勒补偿 (6)1.序百为了放大器应用中的稳定性,运算放大器必须进行补偿,常见的补偿方法有主极点补偿,mi11er补偿、超前/滞后补偿等。
其中MiIIer补偿是一种常见且有效的补偿方法,在经典运放uA741中用到了mi11er补偿:2.米勒效应(MinerEffeCt)在前一篇关于频率补偿的文章中,我们发现制作第一极点需要数十纳法的并联电容。
而另一方面,米勒补偿只需要皮法。
怎么会这样?答案是由米勒效应(MinerEffeCt)提供的。
米勒效应(Mi1IerEffeCt)是指当电容器从具有大负增益的放大器的输入连接到输出时发生的等效电容的增加。
这个概念如图1所示。
施加的电压V的响应,如图1(a)所示,电容器C以电流i=C*dv∕dt响应;如果我们现在以反馈的方式将相同的电容器C连接到具有增益的反相电压放大器,如图1(b)所示,则电流变为:.「矶"一(一为切dυ(1+a)v2=C ----------------- - ------------- =C -------------- - ----------- U归物仁鼠网u!sιdιsdt dt遍@万物云毂网等式13.米勒电容等式1中的量CM被称为米勒电容并且计算如下:仁_∩I n∖r>/二万物云每网匚IsmisGM—J十QtJG 空@万物云畿网等式换句话说,反射到输入的反馈电容C乘以1+av。
这使得可以用相对小的物理电容器合成大电容。
参考图8的PSpice电路,我们有:CM=(1+Gm2*R2)*Cf=(1+250)*9.90pF=2.485nFR1看到的总电容为Ctota1=CM+C1=2.51nF,因此主极点频率为1/(2πR1*Ctota1)=63.4Hz,与上面通过PSpice测量的值一致。
放大电路的频率补偿一、概述放大电路中的频率补偿是指在放大电路中加入相应的电路元件以使信号在不同频率下获得相同的增益,即在许多频率点上获得平坦的增益特性。
这种补偿电路是用来对放大电路的频率响应进行修正的,以确保放大电路对不同频率的信号进行准确的放大。
二、放大电路的频率响应放大电路在不同频率的信号输入下会产生不同的增益,通常会发生低频降低、高频升高的问题。
这是由于不同频率的信号经过传输后的电容、电感和电阻等电路元件的响应不同。
如果不进行修正,放大电路在不同频率下的输出信号将会失真,从而影响信号的传输质量。
三、频率补偿电路的分类1、毛刺电路毛刺电路是一种常见的频率补偿电路,用于平衡高频放大器在频谱上的响应。
在高频范围内,放大器电容和电阻之间的反馈路径会产生毛刺。
这时,可通过在反馈路径中添加一个毛刺电路,以平衡反馈路径上的响应。
2、反馈电容电路反馈电容电路也是常见的频率补偿电路之一,它通过在反馈回路中添加一个带有大电容的元件来平衡放大器在低频范围上的响应。
反馈电容电路还有一个优点,即可以抑制放大器的直流漂移。
3、半导体电子组件半导体电子元件也是常用的频率补偿电路之一。
在集成电路中,由于工艺的限制,晶体管的实际功率增益随频率而降低。
在这种情况下,可以通过添加半导体电子组件来抵消不同频率下的功率损失,从而实现频率补偿。
4、LC网络LC网络也是一种常见的频率补偿电路,它利用电感和电容来平衡放大器的频率响应。
对于低频区域,电感可以将低频信号过滤掉,而对于高频区域,电容则可以将高频信号过滤掉。
因此,通过调整电感和电容的组合,可以实现放大器在整个频率范围内的平坦增益特性。
四、应用实例频率补偿电路在实际应用中非常广泛。
例如,在功率放大器中,频率补偿电路用于保持电路的增益平坦,实现高品质的声音传输。
另外,在无线电通信领域,频率补偿电路是必要的,因为无线电信号在传输过程中会受到频率偏移影响,导致信号质量下降。
频率补偿电路可以对这种偏移进行补偿,以确保信号传输质量。
信息科学与技术学院模拟CMOS集成电路设计——稳定性与频率补偿学习报告姓名:学号:二零一零年十二月稳定性及频率补偿2010-12-3一、自激振荡产生原因及条件1、自激振荡产生原因及条件考虑图1所示的负反馈系统,其中β为反馈网络的反馈系数,并假定β是一个与频率无关的常数,即反馈网络由纯电阻构成,不产生额外的相移(0βϕ=);H (s )为开环增益,则()H s β为环路增益。
所以,该系统输入输出之间的相移主要由基本放大电路产生。
图1 基本负反馈系统 该系统的闭环传输函数(即系统增益)可写为:()()1()Y H s s X H s β=+ 由上式可知,若系统增益分母1()H s j βω==-1,则系统增益趋近于∞,电路可以放大自身的噪声直到产生自激振荡,即:如果1()H j βω=-1,则该电路可以在频率1ω产生自激振荡现象。
则自激振荡条件可表示为:1|()|1H j βω=1()180H j βω∠=-注意到,在1ω时环绕这个环路的总相移是360,因为负反馈本身产生了180的相移,这360的相移对于振荡是必需的,因为反馈信号必须同相地加到原噪声信号上才能产生振荡。
为使振荡幅值能增大,要求环路增益等于或者大于1。
所以,负反馈系统在1ω产生自激振荡的条件为:(1)在该频率下,围绕环路的相移能大到使负反馈变为正反馈;(2)环路增益足以使信号建立。
2、重要工具波特图判断系统是否稳定的重要工具是波特图。
波特图根据零点和极点的大小表示一个复变函数的幅值和相位的渐进特性。
波特图的画法:(1)幅频曲线中,每经过一个极点P ω(零点Z ω),曲线斜率以-20dB/dec(+20dB/ dec)变化;(2)相频曲线中,相位在0.1P ω(0.1Z ω)处开始变化,每经过一个极点P ω(零点Z ω),相位变化-45(±45),相位在10P ω(10Z ω)处变化-90(±90);(3)一般来讲,极点(零点)对相位的影响比对幅频的影响要大一些。

信息科学与技术学院模拟CMOS集成电路设计——稳定性与频率补偿学习报告姓名:学号:二零一零年十二月稳定性及频率补偿2010-12-3一、自激振荡产生原因及条件1、自激振荡产生原因及条件考虑图1所示的负反馈系统,其中β为反馈网络的反馈系数,并假定β是一个与频率无关的常数,即反馈网络由纯电阻构成,不产生额外的相移(0βϕ=o );H (s )为开环增益,则()H s β为环路增益。
所以,该系统输入输出之间的相移主要由基本放大电路产生。
图1 基本负反馈系统 该系统的闭环传输函数(即系统增益)可写为:()()1()Y H s s X H s β=+ 由上式可知,若系统增益分母1()H s j βω==-1,则系统增益趋近于∞,电路可以放大自身的噪声直到产生自激振荡,即:如果1()H j βω=-1,则该电路可以在频率1ω产生自激振荡现象。
则自激振荡条件可表示为:1|()|1H j βω=1()180H j βω∠=-o注意到,在1ω时环绕这个环路的总相移是360o ,因为负反馈本身产生了180o 的相移,这360o 的相移对于振荡是必需的,因为反馈信号必须同相地加到原噪声信号上才能产生振荡。
为使振荡幅值能增大,要求环路增益等于或者大于1。
所以,负反馈系统在1ω产生自激振荡的条件为:(1)在该频率下,围绕环路的相移能大到使负反馈变为正反馈;(2)环路增益足以使信号建立。
2、重要工具波特图判断系统是否稳定的重要工具是波特图。
波特图根据零点和极点的大小表示一个复变函数的幅值和相位的渐进特性。
波特图的画法:(1)幅频曲线中,每经过一个极点P ω(零点Z ω),曲线斜率以-20dB/dec(+20dB/ dec)变化;(2)相频曲线中,相位在0.1P ω(0.1Z ω)处开始变化,每经过一个极点P ω(零点Z ω),相位变化-45o (±45o ),相位在10P ω(10Z ω)处变化-90o (±90o );(3)一般来讲,极点(零点)对相位的影响比对幅频的影响要大一些。