自动控制根轨迹实验(二)
- 格式:doc
- 大小:385.50 KB
- 文档页数:6

自动控制原理实验报告实验题目:线性系统的根轨迹班级:学号:姓名:指导老师:实验时间:一、实验目的1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
二、实验内容同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。
2.1绘制下面系统的根轨迹曲线)136)(22()(22++++=s s s s s Ks G程序:G=tf([1],[1 8 27 38 26 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-12-10-8-6-4-20246-10-8-6-4-20246810Root LocusReal AxisI m a g i n a r y A x i s0204060801001201400.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K>28.74252.2绘制下面系统的根轨迹曲线)10)(10012)(1()12()(2+++++=s s s s s K s G 程序:G=tf([1 12],[1 23 242 1220 1000]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-100102030-50-40-30-20-1001020304050Root LocusReal AxisI m a g i n a r y A x i s01234560.0020.0040.0060.0080.010.012Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围: K>1.1202e+032.3绘制下面系统的根轨迹曲线)11.0012.0)(10714.0()105.0()(2++++=s s s s s K s G 程序:G=tf([5 100],[0.08568 1.914 17.14 100 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-10010203040-60-40-200204060Root LocusReal AxisI m a g i n a r y A x i s012345670.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K> 7.8321根据实验结果分析根轨迹的绘制规则:⑴绘制根轨迹的相角条件与系统开环根轨迹增益 值的大小无关。

自动控制原理根轨迹法自动控制原理是现代工程技术中的重要分支,它涉及到机械、电子、计算机等多个领域。
而根轨迹法则是自动控制原理中的一种重要方法,它可以用来分析和设计控制系统,提高系统的稳定性和性能。
本文将从根轨迹法的基本原理、应用场景和优缺点三个方面进行介绍。
一、基本原理根轨迹法是一种基于极点和零点的控制系统分析方法。
在根轨迹图中,系统的极点和零点被表示为一条曲线,称为根轨迹。
根轨迹图可以用来分析系统的稳定性、响应速度和稳态误差等性能指标。
根轨迹法的基本原理是通过改变系统的参数,使得根轨迹图在复平面上移动,从而实现对系统性能的优化。
二、应用场景根轨迹法可以应用于各种控制系统的设计和分析中。
例如,在电机控制系统中,根轨迹法可以用来分析电机的转速响应和负载扰动对系统的影响。
在飞行控制系统中,根轨迹法可以用来设计飞机的自动驾驶系统,提高飞机的稳定性和飞行性能。
在机器人控制系统中,根轨迹法可以用来设计机器人的运动控制系统,实现机器人的精确控制和运动规划。
三、优缺点根轨迹法的优点是可以直观地表示系统的稳定性和性能指标,便于工程师进行控制系统的设计和分析。
此外,根轨迹法还可以用来分析系统的鲁棒性和鲁棒稳定性,提高系统的抗干扰能力和鲁棒性。
但是,根轨迹法也存在一些缺点,例如对于高阶系统,根轨迹法的计算复杂度较高,需要使用计算机进行计算。
此外,根轨迹法也无法处理非线性系统和时变系统,需要使用其他方法进行分析和设计。
总之,根轨迹法是自动控制原理中的一种重要方法,可以用来分析和设计各种控制系统。
在实际工程中,工程师需要根据具体的应用场景和系统要求,选择合适的控制方法和算法,实现对系统的优化和控制。
西南交通大学自动控制原理课程实验报告册
《自动控制原理》课程实验报告(一)
《自动控制原理》课程实验报告(二)
《自动控制原理》课程实验报告(三)
《自动控制原理》课程实验报告(四)
三、思考题
1. 参数在一定范围内取值才能使闭环系统稳定的系统称为条件稳定系统。
对于这类系
统可以通过根轨迹法来确定使系统稳定的参数取值范围,也可以适当调整系统参数或增加校正网络以消除条件稳定性问题。
对于下图所示条件稳定系统:
试问能否通过增加开环零极点消除系统条件稳定性问题,即对于所有根轨迹增益,根轨迹全部位于s左半平面,闭环系统稳定。
《自动控制原理》课程实验报告(五)
《自动控制原理》课程实验报告(六)
《自动控制原理》课程实验报告(七)
《自动控制原理》课程实验报告(八)
《自动控制原理》课程实验报告(九)。
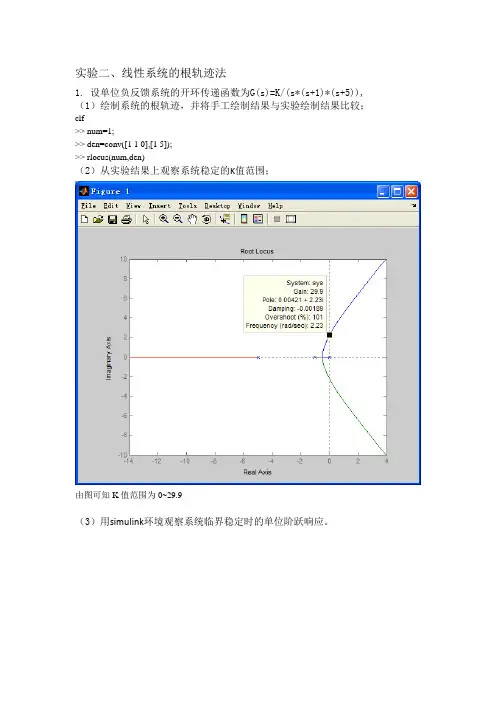
实验二、线性系统的根轨迹法1. 设单位负反馈系统的开环传递函数为G(s)=K/(s*(s+1)*(s+5)), (1)绘制系统的根轨迹,并将手工绘制结果与实验绘制结果比较;clf>> num=1;>> den=conv([1 1 0],[1 5]);>> rlocus(num,den)(2)从实验结果上观察系统稳定的K值范围;由图可知K值范围为0~29.9(3)用simulink环境观察系统临界稳定时的单位阶跃响应。
2.设单位反馈控制系统的开环传递函数为G(s)=K*(s+3)/(s*(s+1)*(s+2));(1)仿照上题绘制系统的根轨迹,并判断系统的稳定性;clf>> num=[1 3];>> den=conv([1 1 0],[1 2]);>> rlocus(num,den)由图知,该系统始终保持稳定.(2)分别取K=5 和K=50,利用simulink环境观察系统的单位阶跃响应,并比实验结果。
K=5时,该系统呈现欠阻尼状态,阻尼系数接近于1。
K=50时,该系统呈现欠阻尼状态,阻尼系数接近于0.3.完成教材第四章习题4-7,4-8,4-10(1)习题4-7,已知开环传递函数为K/(s(s+4)(s^2+4s+20));试概略画出其闭环系统根轨迹图。
clf>> num=1;>> den=conv([1 4 0],[1 4 20]);>> rlocus(num,den)该系统K值范围为0~260时系统稳定。
(2)习题4-8,已知开环传递函数为K(s+2)/((s^2+4s+9)^2);试概略画出其闭环系统根轨迹图。
clf>> num=[1 2];>> den=conv([1 4 9],[1 4 9]);>> rlocus(num,den)该系统K值范围为0~95.6时稳定。
自动控制原理实验报告姓 名班 级学 号指导教师1自动控制原理实验报告(一)一.实验目的1.了解掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式。
2.观察分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响。
3.了解掌握典型二阶系统模拟电路的构成方法及Ⅰ型二阶闭环系统的传递函数标准式。
4.研究Ⅰ型二阶闭环系统的结构参数--无阻尼振荡频率ωn 、阻尼比ξ对过渡过程的影响。
5.掌握欠阻尼Ⅰ型二阶闭环系统在阶跃信号输入时的动态性能指标σ%、t p 、t s 的计算。
6.观察和分析Ⅰ型二阶闭环系统在欠阻尼、临界阻尼、过阻尼的瞬态响应曲线,及在阶跃信号输入时的动态性能指标σ%、t p 值,并与理论计算值作比对。
二.实验过程与结果1.观察比例环节的阶跃响应曲线1.1模拟电路图1.2传递函数(s)G(s)()o i U K U s == 10R K R =1.3单位阶跃响应U(t)K 1.4实验结果1.5实验截图2342.观察惯性环节的阶跃响应曲线2.1模拟电路图2.2传递函数(s)G(s)()1o i U KU s TS ==+10R K R =1T R C =2.3单位阶跃响应0(t)K(1e)tTU-=-2.4实验结果2.5 实验截图5673.观察积分环节的阶跃响应曲线3.1模拟电路图3.2传递函数(s)1G(s)()TS o i U U s ==i 0T =R C3.3单位阶跃响应01(t)i U t T =3.4 实验结果3.5 实验截图89104.观察比例积分环节的阶跃响应曲线4.1模拟电路图4.2传递函数0(s)1(s)(1)(s)i i U G K U T S ==+10K R R =1i T R C=4.3单位阶跃响应1 (t)(1)U K tT=+ 4.4实验结果4.5实验截图1112135.观察比例微分环节的阶跃响应曲线5.1模拟电路图5.2传递函数0(s)1(s)()(s)1i U TSG K U S τ+==+12312(R )D R R T CR R =++3R C τ=120R R K R +=141233(R //R )R D K R +=0.06D D T K sτ=⨯=5.3单位阶跃响应0(t)()U KT t Kδ=+5.4实验结果截图6.观察比例积分微分(PID )环节的响应曲线6.1模拟电路图156.2传递函数0(s)(s)(s)p p p d i i K U G K K T S U T S ==++123212(R )C d R R T R R =++i 121(R R )C T =+120p R R K R +=1233(R //R )R D K R +=32R C τ= D D T K τ=⨯6.3单位阶跃响应0(t)()p p D p K U K T t K tTδ=++6.4实验观察结果截图16三.实验心得这个实验,收获最多的一点:就是合作。
自动控制理论实验报告实验二控制系统的时域分析一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、实验要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0==?∞t x f dx x f 其拉氏变换为:)()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:① )(sys impulse ;② );,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y =(二)分析系统稳定性有以下三种方法:1、利用pzmap 绘制连续系统的零极点图;2、利用tf2zp 求出系统零极点;3、利用roots 求分母多项式的根来确定系统的极点(三)系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容实验三控制系统的根轨迹分析一实验目的1.利用计算机完成控制系统的根轨迹作图2.了解控制系统根轨迹图的一般规律3.利用根轨迹图进行系统分析二实验要点1. 预习什么是系统根轨迹?2. 闭环系统根轨迹绘制规则。
三实验方法(一)方法:当系统中的开环增益k 从0到变化时,闭环特征方程的根在复平面上的一组曲线为根轨迹。
2 线性系统的根轨迹研究
2.1 实验目的
(1)
考察闭环系统根轨迹的一般形成规律。
(2)
观察和理解引进零极点对闭环根轨迹的影响。
(3)
观察、理解根轨迹与系统时域响应之间的联系。
(4) 初步掌握利用产生根轨迹的基本指令和方法。
2.2 实验内容
根轨迹绘制的指令法、交互界面法;复平面极点分布和系统响应的关系。
已知单位负反馈系统的开环传递函数为2
)^54()2()(2+++=s s s K s G ,实验要求: (1) 试用MATLAB 的rlocus 指令,绘制闭环系统根轨迹。
(要求写出指令,并绘出图
形。
)
num=[1 2]
num =
1 2
>> den=[1 0 16 0 25]
den =
1 0 16 0 25
>> rlocus(tf(num,den));
(2)利用MATLAB的rlocfind指令,确定根轨迹的分离点、根轨迹与虚轴的交点。
(要求写出指令,并给出结果。
)
(3)利用MATLAB的rlocfind指令,求出系统临界稳定增益,并用指令验证系统的稳定性。
>> rlocfind(G)
Select a point in the graphics window
selected_point =
-0.0000 + 3.6025i
ans =
65.8411
>> sym G
G=tf([1 2],[1 8 26 40 25]);
sym p
den=[1 8 26 40 25];
p=roots(den)
ans =
G
ans =
p
p =
-2.0000 + 1.0000i
-2.0000 - 1.0000i
-2.0000 + 1.0000i
-2.0000 - 1.0000i
(4)利用SISOTOOL交互界面,获取和记录根轨迹分离点、根轨迹与虚轴的交点处的关键参数,并与前面所得的结果进行校对验证。
(要求写出记录值,并给出说明。
)
根轨迹与虚轴交点
分离点
(5) 在SISOTOOL 界面上,打开闭环的阶跃响应界面,然后用鼠标使闭环极点(小红
方块)从开环极点开始沿根轨迹不断移动,在观察三个闭环极点运动趋向的同时,注意观察系统阶跃响应的变化。
根据观察,(A )写出响应中出现衰减振荡分量时的K 的取值范围,(B )写出该响应曲线呈现“欠阻尼”振荡型时的K 的取值范围。
响应中出现衰减振荡分量时的K 的取值范围为0 ~3.25;
(6) 添加零点或极点对系统性能的影响,以二阶系统为例开环传递函数
)
6.0(1)(2s s s G += 添加零点,增加系统阻尼数,超调量减小,在sisotool 界面上做仿真,写出未添加零点时系统的超调量,峰值,调节时间,添加零点后系统的超调量,峰值,调节时间,并写出系统添加零点的数值,并进行理论分析。
(选做)
南京邮电大学
实验报告
实验名称:______________________ ______________________ ______________________
课程名称:______________________
学号:______________________
姓名:______________________
开课时间 20 /20 学年,第学期。