第3章 测试系统的基本特性
- 格式:ppt
- 大小:2.20 MB
- 文档页数:88



第一章 测试技术基础知识1.4 常用的测量结果的表达方式有哪3种?对某量进行了8次测量,测得值分别为:82.40、82.43、82.50、82.48、82.45、82.38、82.42、82.46。
试用第3种表达方式表示其测量结果。
解:1)常用的测量结果的表达方式有基于极限误差的表达方式、基于t 分布的表达方式和基于不确定度的表达方式等3种2)基于不确定度的表达方式可以表示为0x s x x x nσ∧=±=±均值为8118i i x x ===∑82.44标准偏差为821()7ii x x s =-==∑0.04样本平均值x 的标准偏差的无偏估计值为ˆ8x sσ==0.014 所以082.440.014x =±第二章 信号描述与分析2.2 一个周期信号的傅立叶级数展开为12ππ120ππ()4(cos sin )104304n n n n n y t t t ∞==++∑(t 的单位是秒) 求:1)基频0ω;2)信号的周期;3)信号的均值;4)将傅立叶级数表示成只含有正弦项的形式。
解:基波分量为12ππ120ππ()|cos sin 104304n y t t t ==+ 所以:1)基频0π(/)4rad s ω=2)信号的周期02π8()T s ω==3)信号的均值42a = 4)已知 2π120π,1030n n n n a b ==,所以 22222π120π()() 4.00501030n n n n n A a b n π=+=+= 120π30arctan arctan arctan 202π10n n nn bn a ϕ=-=-=-所以有0011π()cos()4 4.0050cos(arctan 20)24n n n n a n y t A n t n t ωϕπ∞∞===++=+-∑∑2.3 某振荡器的位移以100Hz 的频率在2至5mm 之间变化。
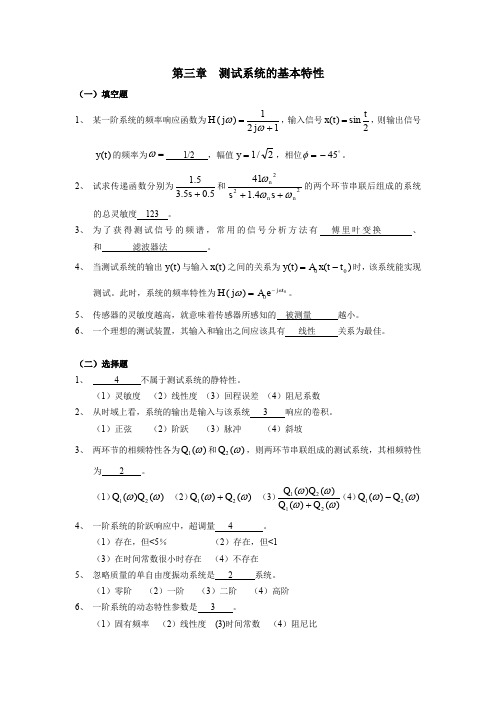








第3章习题 测试系统的基本特性一、选择题1.测试装置传递函数H (s )的分母与( )有关。
A.输入量x (t )B.输入点的位置C.装置的结构 2.非线形度是表示定度曲线( )的程度。
A.接近真值B.偏离其拟合直线C.正反行程的不重合 3.测试装置的频响函数H (j ω)是装置动态特性在( )中的描述。
A .幅值域 B.时域 C.频率域D.复数域 4.用常系数微分方程描述的系统称为( )系统。
A.相似B.物理C.力学D.线形 5.下列微分方程中( )是线形系统的数学模型。
A.225d y dy dx t y x dt dt dt ++=+B. 22d y dx y dt dt +=C.22105d y dy y x dt dt-=+6.线形系统的叠加原理表明( )。
A.加于线形系统的各个输入量所产生的响应过程互不影响B.系统的输出响应频率等于输入激励的频率C.一定倍数的原信号作用于系统所产生的响应,等于原信号的响应乘以该倍数7.测试装置能检测输入信号的最小变化能力,称为( )。
A.精度 B.灵敏度 C.精密度 D.分辨率8.一般来说,测试系统的灵敏度越高,其测量范围( )。
A.越宽 B. 越窄 C.不变9.测试过程中,量值随时间而变化的量称为( )。
A.准静态量 B.随机变量 C.动态量 10.线形装置的灵敏度是( )。
A.随机变量B.常数C.时间的线形函数11.若测试系统由两个环节串联而成,且环节的传递函数分别为12(),()H s H s ,则该系统总的传递函数为( )。
若两个环节并联时,则总的传递函数为( )。
A. 12()()H s H s +B.12()()H s H s ⋅C.12()()H s H s -D.12()/()H s H s12.输出信号与输入信号的相位差随频率变化的关系就是( )。
A.幅频特性B.相频特性C.传递函数D.频率响应函数 13.时间常数为τ的一阶装置,输入频率为 1ωτ=的正弦信号,则其输出与输入间的相位差是( )。



第3章 测量系统的基本特性3.1概述测量的目的是通过检测传感、信号调理、信号处理、显示和记录,将被测的物理量提供给测量者。
测量系统是在整个测量过程中所用到的各种仪器和装置的组合。
为了正确描述或反映被测的物理量,实现不失真测量,获取和分析测量系统特性尤为重要。
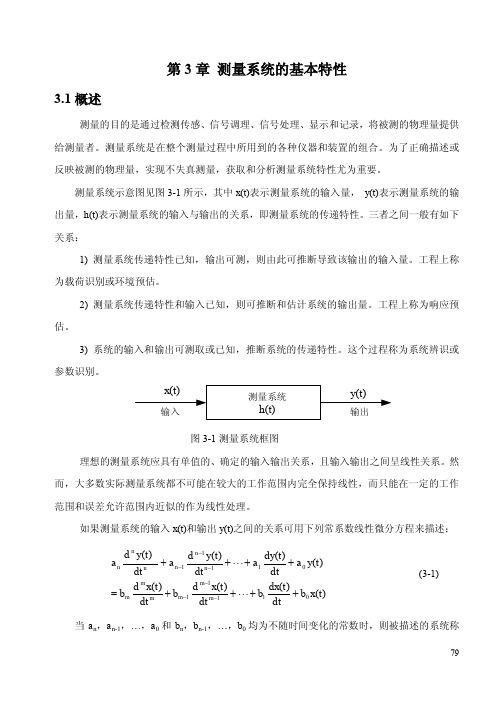
测量系统示意图见图3-1所示,其中x (t )表示测量系统的输入量, y (t )表示测量系统的输出量,h (t )表示测量系统的输入与输出的关系,即测量系统的传递特性。
三者之间一般有如下关系:1) 测量系统传递特性已知,输出可测,则由此可推断导致该输出的输入量。
工程上称为载荷识别或环境预估。
2) 测量系统传递特性和输入已知,则可推断和估计系统的输出量。
工程上称为响应预估。
3) 系统的输入和输出可测取或已知,推断系统的传递特性。
这个过程称为系统辨识或参数识别。
图3-1测量系统框图理想的测量系统应具有单值的、确定的输入输出关系,且输入输出之间呈线性关系。
然而,大多数实际测量系统都不可能在较大的工作范围内完全保持线性,而只能在一定的工作范围和误差允许范围内近似的作为线性处理。
如果测量系统的输入x (t )和输出y (t )之间的关系可用下列常系数线性微分方程来描述:(3-1)当a n ,a n-1,…,a 0和b n ,b n-1,…,b 0均为不随时间变化的常数时,则被描述的系统称)()()()()()()()(0111101111t x b dtt dx b dt t x d b dt t x d b t y a dt t dy a dt t y d a dt t y d a m m m m m m n n n n n n ++⋅⋅⋅++=++⋅⋅⋅++------为时不变系统或定常系统,且该系统满足单值性并具有确定的输入输出关系,即满足理想系统的要求。
但是严格地说,许多实际测量系统都是时变的。
因为构成系统的材料和元部件的特性并非稳定。
例如电子元件中电阻、半导体器件,弹性材料的弹性模量等都会受温度影响而随时间产生变化,它们的不稳定会导致上述微分方程中系数的时变性。
