一种多输入多输出系统传递函数的实用计算方法
- 格式:doc
- 大小:317.50 KB
- 文档页数:3

多输入多输出技术学院:工商管理学院专业:市场营销专业姓名:杨洋班级:B1101学号:1013110122内容摘要:MIMO是指多输入多输出(Multiple In Multiple Out),它是指一台设备用多个天线在同一个频道内同时发送或者接收多个独立的数据流。
通过这种机制,用户可以获得更高的传输速率和更远的传输距离。
MIMO是目前IEEE802.11n标准的核心技术。
除了多天线外,还需要配合专门的软件才能真正实现这个技术的优点。
综合各种必要条件,多天线技术和软件保证了数据可以在更远的距离和更多的干扰中更稳定的发送和接收。
总之一句话,MIMO技术带给您更远的传输距离和更高的传输速率。
在有些情况下,MIMO技术可以在超过300英尺的距离上达到100Mbps的传输速率。
MIMO(Multiple-Input Multiple-Out-put)系统是一项运用于802.11n的核心技术。
802.11n是IEEE继802.11b\a\g后全新的无线局域网技术,速度可达600Mbps。
同时,专有MIMO技术可改进已有802.11a/b/g网络的性能。
该技术最早是由Marconi于1908年提出的,它利用多天线来抑制信道衰落。
根据收发两端天线数量,相对于普通的SISO(Single-Input Single-Output)系统,MIMO还可以包括SIMO(Single-Input Multi-ple-Output)系统和MISO(Multiple-Input Single-Output)系统。
关键词:发展史技术分类研究状况重大历程技术应用总结发展史:MIMO波束成型技术的缺点乃是在都市的环境中,信号容易朝向建筑物或移动的车辆等目标分散,因而模糊其波束的集中特性(即相长干涉),丧失多数的信号增益及减少干扰的特性。
然而此项缺点却随着空间分集及空间多工的技术在 1990 年代末的发展,而突然转变为优势。
这些方法利用多径(multipath propagation)现象来增加资料吞吐量、传送距离,或减少比特错误率。

求系统的传递函数常用的方法(一)求系统的传递函数常用什么是系统的传递函数?系统的传递函数是描述输入与输出之间关系的数学表达式,它在信号处理和控制系统中起到了重要作用。
通过分析系统的传递函数,我们可以了解系统对不同频率信号的响应以及系统的稳定性等性质。
常用的求系统传递函数的方法以下是常用的求系统传递函数的几种方法:1. 系统的微分方程法•根据系统的微分方程列出系统的特征方程;•将特征方程变换为拉普拉斯变换形式,得到系统的传递函数。
2. 系统的状态空间法•将系统的微分方程转化为状态空间表达式;•对状态空间表达式进行拉普拉斯变换,得到系统的传递函数。
3. 系统的频域响应法•对系统的输入进行傅里叶变换,得到输入信号在频域上的表示;•对系统的输出进行傅里叶变换,得到输出信号在频域上的表示;•根据输入和输出的频域表示,求得系统的传递函数。
4. 反馈控制法•通过反馈控制的计算方法,得到系统的传递函数。
5. Bode图法•对系统的频率响应进行测量,并绘制Bode图,从图中获取系统的传递函数。
6. 试探法•利用试探函数对系统进行近似建模,得到系统的传递函数。
7. 逆拉普拉斯变换法•已知系统在频域上的传递函数表达式,通过逆拉普拉斯变换求得系统的微分方程,从而得到系统的传递函数。
8. Z变换法•对离散系统进行Z变换得到系统的传递函数。
总结求系统的传递函数是进行信号处理和控制系统设计的基础工作之一。
通过对不同系统的特点和性质的分析,我们可以选择合适的方法来求解系统的传递函数,并进一步应用于实际工程中。
以上是常用的求系统传递函数的几种方法,每种方法都有其适用范围和优缺点,可以根据具体情况选择合适的方法来进行求解。
希望本文对您理解求系统传递函数方法有所帮助。
9. MATLAB/Simulink方法•MATLAB/Simulink 是一种常用的工具,可以用于求解系统的传递函数。
在 MATLAB 中,可以使用tf函数来创建传递函数对象,并使用相应的参数来指定系统的传递函数形式。
多输入多输出系统传递函数矩阵
多输入多输出系统传递函数矩阵是指将一个多变量系统的所有输入和输出以矩阵形式表示的传递函数。
在控制系统设计中,我们经常会遇到多输入多输出系统的问题,因此需要有一种有效的方法来描述和分析这种系统。
对于一个n输入n输出的系统,传递函数矩阵H(s)可以表示为: H(s) = [H11(s) H12(s) ... H1n(s)]
[H21(s) H22(s) ... H2n(s)]
[... ... ... ]
[Hn1(s) Hn2(s) ... Hnn(s)]
其中,Hij(s)表示第i个输出对第j个输入的传递函数。
传递函数矩阵可以简化多输入多输出系统的分析和设计过程,使得我们可以更方便地进行控制器设计和系统优化。
同时,传递函数矩阵也可以用于描述多个子系统之间的相互作用,帮助我们更好地理解系统的整体行为。
在实际应用中,我们可以使用矩阵运算来计算传递函数矩阵,并根据需要对其进行简化或扩展。
通过对传递函数矩阵的分析,我们可以找到系统的稳定性、响应速度、误差等特性,从而选择合适的控制策略和参数来实现系统的控制和优化。
- 1 -。


用双通道分析仪计算多输入系统的传递函数
作者:向阳
作者单位:广东机电职业技术学院,广东广州,510515
1.兰秋平.简新春德兴铜矿循环经济战略思考[会议论文]-2006
2.田利.王启山预氧化与气浮工艺联用处理低温低浊黄河水效果比较[会议论文]-2006
3.杨建红.张认成.房怀英基于Duffing振子信号检测的高压电弧短路监测系统[会议论文]-2006
4.孙建平.曹志清.张爱军基于STL文件的快速成型切片误差分析[会议论文]-2006
5.樊远征超精模糊控制算法与模块化及其在节能中的应用[会议论文]-2006
6.张云电.林金钳.胡皇印基于BP神经网络的压电换能器谐振频率预测[会议论文]-2006
7.黄伟.吴国安.汤清华.易冬柏基于FPGA的1553B总线接口板的设计[会议论文]-2006
8.严德昆二阶过阻尼系统传递函数辨识的新方法[期刊论文]-控制理论与应用2001,18(4)
9.苏添发.戴曙光.穆平安车牌及其字符分割的方法研究[会议论文]-2006
引用本文格式:向阳用双通道分析仪计算多输入系统的传递函数[会议论文] 2006。
多输入多输出控制系统根轨迹
多输入多输出(MIMO)控制系统的根轨迹是指系统在参数空间中的一组轨迹,这些轨迹描述了系统的闭环特性。
根轨迹主要用于分析系统的稳定性和动态响应。
对于MIMO系统,根轨迹的分析通常涉及多个输入和多个输出之间的关系。
在根轨迹图上,每个输入-输出通道的根轨迹呈现为一组曲线,展示了系统参数变化时闭环特性的变化。
以下是MIMO系统根轨迹分析的一般步骤:
1.系统传递函数:将MIMO系统表示为传递函数矩阵。
每个输入-输出通道对应于一个独立的传递函数。
2.特征方程:从传递函数中导出闭环系统的特征方程,这是导致系统稳定性的方程。
3.参数变化:改变系统的参数,例如增益或其他控制器参数。
这可以通过改变控制器的增益矩阵或者系统的参数矩阵来实现。
4.计算根轨迹:使用特征方程,计算参数变化时的系统极点。
这些极点构成了根轨迹。
5.分析:通过分析根轨迹,可以了解系统的稳定性、过渡特性和频率响应。
MIMO系统的根轨迹分析对于控制系统设计和调整是非常有用的,因为它提供了关于系统动态特性的直观理解。
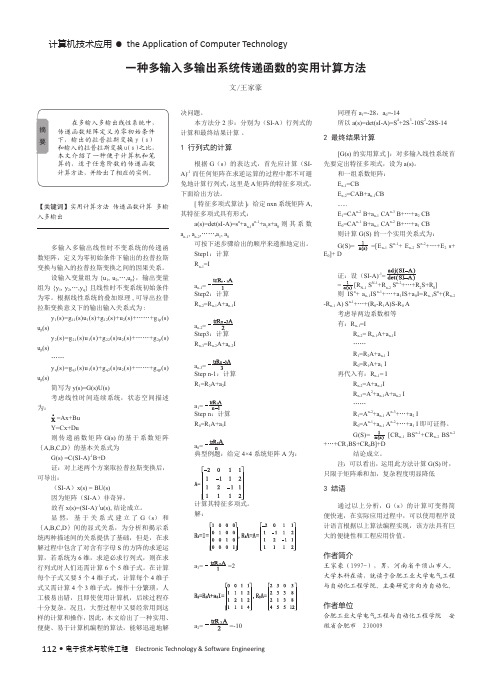
一种多输入多输出系统传递函数的实用计算方法
作者:王家豪
来源:《电子技术与软件工程》2018年第15期
摘要
在多输入多输出线性系统中,传递函数矩阵定义为零初始条件下,输出的拉普拉斯变换y (s)和输入的拉普拉斯变换u(s)之比,本文介绍了一种便于计算机和笔算的,适于任意阶数的传递函数计算方法,并给出了相应的实例。
【关键词】实用计算方法传递函数计算多输入多输出
多输入多输出线性时不变系统的传递函数矩阵,定义为零初始条件下输出的拉普拉斯变换与输入的拉普拉斯变换之间的因果关系。
设输入变量组为{u1,u2,…,u p},输出变量组为{y1,y2,…,y q)且线性时不变系统初始条件为零。
根据线性系统的叠加原理,可导出拉普拉斯变换意义下的输出输入关系式为:
简写为y(s)=G(s)U(s)
考虑线性时间连续系统,状态空间描述为:
X=Ax+Bu
Y=Cx+Du
则传递函数矩阵G(s)的基于系数矩阵{A,B,C,D}的基本关系式为
G(s)=C(SI-A)-1B+D
证:对上述两个方案取拉普拉斯变换后,可导出:
(SI-A)x(s)=BU(s)
因为矩阵(SI-A)非奇异,
故有x(s)=(SI-A)-1u(s),结论成立。
显然,基于关系式建立了G(s)和{A,B,C,D}间的显式关系,为分析和揭示系统两种描述间的关系提供了基础,但是,在求解过程中包含了对含有字母s的方阵的求逆运算,若系统为6维,求逆必求行列式,则在求行列式时人们还需计算6个5维子式。
在计算每个子式又要5个4维子式,计算每个4维子式又需计算4个3维子式,操作十分繁琐,人工极易出错,且即使使用计算机,后续过程亦十分复杂。
况且,大型过程中又要经常用到这样的计算和操作,因此,本文给出了一种实用、便捷、易于计算机编程的算法,能够迅速地解决问题。
本方法分z步:分别为(SI-A)行列式的计算和最终结果计算。
1 行列式的计算
根据G(s)的表达式,首先应计算(SI-A)-1而任何矩阵在求逆运算的过程中都不可避免地计算行列式,这里是A矩阵的特征多项式,下面给出方法。
[特征多项式算法]:给定nxn系统矩阵A,其特征多项式具有形式:
可按下述步骤给出的顺序来递推地定出。
典型例题:给定4×4系统矩阵A为:
计算其特征多项式。
解:
2 最终结果计算
[G(s)的实用算式]:对多输入线性系统首先要定出特征多项式,设为a(s)。
和一组系数矩阵:
则计算G(S)的一个实用关系式为:
考虑导两边系数相等
结论成立。
注:可以看出,运用此方法计算G(S)时,只限于矩阵乘和加,复杂程度明显降低
3 结语
通过以上分析,G(s)的计算可变得简便快速,在实际应用过程中,可以使用程序设计语言根据以上算法编程实现,该方法具有巨大的便捷性和工程应用价值。