理论力学第III篇动力学习题课
- 格式:ppt
- 大小:1.27 MB
- 文档页数:38
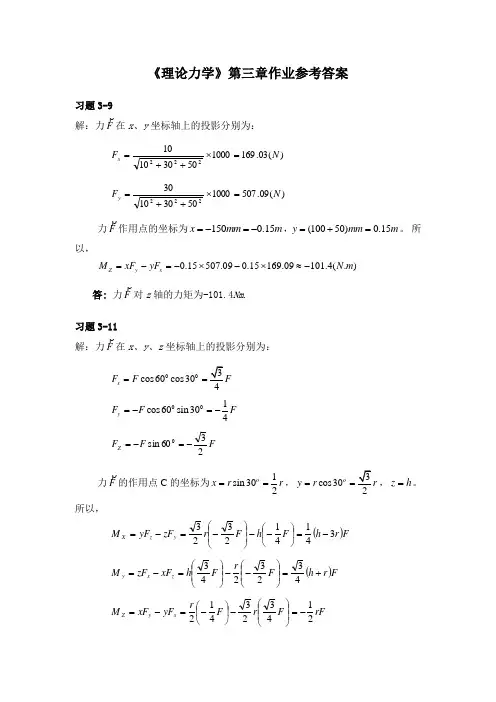
《理论力学》第三章作业参考答案习题3-9解:力F在x 、y 坐标轴上的投影分别为:)(03.169100050301010222N F x =⨯++=)(09.507100050301030222N F y =⨯++=力F作用点的坐标为1500.15x m m m =-=-,(10050)0.15y mm m =+=。
所以,0.15507.090.15169.09101.4(.)Z y x M xF yF N m =-=-⨯-⨯≈-答: 力F对z 轴的力矩为-101.4Nm .习题3-11解:力F在x 、y 、z 坐标轴上的投影分别为:00cos 60cos 304x F F F ==1cos 60sin 304y F F F=-=-FF F Z 2360sin 0-=-=力F的作用点C 的坐标为1sin 302o x r r==,cos 302o y r ==,z h =。
所以,()Fr h F h F r zF yF My z X341412323-=⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛-=-=()F r h F r F h xF zF Mz x y+=⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛=-=4323243rF F r F r yF xF Mxy Z214323412-=⎪⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-=-=答:力F对x 、y 、z 轴的矩分别为:()134h r F -,)4h r F +,12rF-。
习题3-12解:以整个支架为研究对象。
由于各杆为二力杆,球铰链A 、B 、C 处的约束力A F 、B F 、C F 沿杆件连线汇交于D 端球铰链,与物块的重力P构成一空间汇交力系,其受力情况如图所示。
以O 为原点建立坐标系,列平衡方程,我们有⎪⎪⎩⎪⎪⎨⎧===∑∑∑000z y x F F F⎪⎩⎪⎨⎧=-++=++=-015sin 30sin 45sin 30sin 45sin 015cos 30cos 45sin 30cos 45sin 045cos 45cos 000000000000P F F F F F F F F C B A C B A B A 解之得:()()()cos1526.39()2sin 45sin 3015cos1526.39()2sin 45sin 3015cos 3033.46()sin 3015o A o o ooB o o ooC o o P F kN P F kN F P kN ⎧⎪==-⎪⎪⎪==⎨-⎪⎪⎪=-=-⎪-⎩答:铰链A 、B 的约束力均等于26.39kN ,方向与图示相同,即为压力,铰链C 的约束力等于-33.46 kN ,方向与图示相反,即为拉力。
目录第一章质点力学 (2)第二章质点组力学 (56)第三章刚体力学 (74)第四章转动参考系 (105)第五章分析力学 (115)第一章 质点力学1.1 由题可知示意图如题1.1.1图:{{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a . 则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得11021at t s v +=再由此式得()()2121122t t t t t t s a +-=证明完毕.1.2 解 由题可知,以灯塔为坐标原点建立直角坐标如题1.2.1图.题1.2.1图设A 船经过0t 小时向东经过灯塔,则向北行驶的B 船经过⎪⎭⎫ ⎝⎛+2110t 小时经过灯塔任意时刻A 船的坐标()t t x A 15150--=,0=A yB 船坐标0=B x ,⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛+-=t t y B 15211150则AB 船间距离的平方()()222B A B A y y x x d -+-=即()2021515t t d -=201521115⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛++t t()20202211225225675900450⎪⎭⎫ ⎝⎛++++-=t t tt t2d 对时间t 求导()()67590090002+-=t t dtd d AB 船相距最近,即()02=dtdd ,所以h t t 430=- 即午后45分钟时两船相距最近最近距离22min231543154315⎪⎭⎫ ⎝⎛⨯-⨯+⎪⎭⎫ ⎝⎛⨯=s km1.3 解 ()1如题1.3.2图第1.3题图y题1.3.2图由题分析可知,点C 的坐标为⎩⎨⎧=+=ψψϕsin cos cos a y a r x 又由于在∆AOB 中,有ϕψsin 2sin ar =(正弦定理)所以ry r a 2sin 2sin ==ψϕ联立以上各式运用1cos sin 22=+ϕϕ由此可得rya x r a x 22cos cos --=-=ψϕ得12422222222=---++r y a x y a x r y 得22222223y a x r a x y -=-++化简整理可得()()2222222234r a y x y a x -++=-此即为C 点的轨道方程.(2)要求C 点的速度,分别求导⎪⎪⎩⎪⎪⎨⎧=--=2cos sin cos 2cos sin ϕωψψϕωϕωr y r r x 其中ϕω = 又因为ψϕsin 2sin a r =对两边分别求导 故有ψϕωψcos 2cos a r =所以22y x V +=4cos sin cos 2cos sin 2222ϕωψψϕωϕωr r r +⎪⎪⎭⎫ ⎝⎛--= ()ψϕψϕϕψω++=sin cos sin 4cos cos 22r1.4 解 如题1.4.1图所示,A BOCLxθd 第1.4题图OL 绕O 点以匀角速度转动,C 在AB 上滑动,因此C 点有一个垂直杆的速度分量22x d OC v +=⨯=⊥ωωC 点速度dx d d v v v 222sec sec cos +====⊥⊥ωθωθθ 又因为ωθ= 所以C点加速度 θθθω ⋅⋅⋅⋅==tan sec sec 2d dt dv a ()2222222tan sec 2d x d x d +==ωθθω1.5 解 由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin 1π 由加速度的微分形式我们可知dtdv a =代入得dtT t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫ ⎝⎛-=002sin 1π可得 :D Ttc Tct v ++=2cos2ππ(D 为常数)代入初始条件:0=t 时,0=v ,故c TD π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos2T t T t c v ππ 又因为dtds v =所以=ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ1.6 解 由题可知质点的位矢速度r λ=//v ①沿垂直于位矢速度μθ=⊥v又因为 r r λ== //v , 即r rλ=μθθ==⊥r v 即rμθθ= ()()j i v a θ r dtd r dt d dt d +==(取位矢方向i ,垂直位矢方向j ) 所以()j i i i θ r rdtd r i dt r d r dt d +=+=()dtd r dt d r dt dr r dt d j j j j θθθθ ++=i j j 2r r r θθθ -+= 故()()j i a θθθ r r r r22++-= 即 沿位矢方向加速度()2θ r ra -= 垂直位矢方向加速度()θθr r a 2+=⊥ 对③求导r rr 2λλ== 对④求导θμμθθr rr +-=2⎪⎭⎫⎝⎛+=λμμθr 把③④⑦⑧代入⑤⑥式中可得rr a 222//θμλ-= ⎪⎭⎫ ⎝⎛+=⊥r a μλμθ1.7 解 由题可知⎩⎨⎧==θθsin cos r y r x ①②对①求导θθθ sin cos r r x-= ③ 对③求导2 ④对②求导θθθcos sin r r y+=⑤ 对⑤求导θθθθθθθsin cos cos 2sin 2 r r r ry -++=⑥ 对于加速度a ,我们有如下关系见题1.7.1图题1.7.1图即⎩⎨⎧+=+=θθθθθθcos sin sin cos a a y a a x r r⑦--⑧ 对⑦⑧俩式分别作如下处理:⑦θcos ⨯,⑧θsin ⨯ 即得⎩⎨⎧+=-=θθθθθθθθθθcos sin sin sin cos sin cos cos a a y a a x r r⑨--⑩ ⑨+⑩得θθsin cos yx a r += ⑾ 把④⑥代入 ⑾得2θr r a r -= 同理可得θθθ r r a 2+= 1.8解 以焦点F 为坐标原点,运动如题1.8.1图所示]题1.8.1图则M 点坐标⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= )又因为()()221cos 111e a e e a r -+-=θ即()rer e a --=21cos θ 所以()()2222222221211cos 1sin e r e ar r e a --+--=-=θθ故有()2222224222sin 1ωθωr e a r e v +-=()2224221ea r e -=ω()()]1211[2222222e r e ar r ea --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω 即()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)1.9证 质点作平面运动,设速度表达式为j i v y x v v +=令为位矢与轴正向的夹角,所以dt d v dt dv dt d v dt dv dt d y y x x j j i i v a +++==j i ⎪⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x y y x v dt dv v dt dv 所以[]j i a ⎪⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x yy x v dt dv v dt dv ()j i y x v v +⋅ θθ y x y y y x x x v v dt dv v v v dt dv v ++-=dtdv v dt dv v y yxx += 又因为速率保持为常数,即C C v v y x ,22=+为常数对等式两边求导022=+dtdv v dt dv v y y xx所以0=⋅v a即速度矢量与加速度矢量正交.1.10解 由题可知运动轨迹如题1.10.1图所示,题1.10.1图则质点切向加速度dtdv a t =法向加速度ρ2n v a =,而且有关系式ρ2v 2k dt dv -= ①又因为()232y 1y 1'+''=ρ②2px y 2=所以yp y =' ③ 32yp y -='' ④ 联立①②③④2322322y p 1y p 2kv dtdv⎪⎪⎭⎫ ⎝⎛+-= ⑤又dydv ydt dy dy dv dt dv =⋅=把2px y 2=两边对时间求导得pyy x= 又因为222y xv += 所以22221py v y+= ⑥ 把⑥代入⑤23223222122121⎪⎪⎭⎫ ⎝⎛+⋅-=⋅⎪⎪⎭⎫ ⎝⎛+y p y p kv dydvp y v既可化为222py dykp v dv +-= 对等式两边积分222py dykp v dv p p vu+-=⎰⎰- 所以πk ue v -=1.11解 由题可知速度和加速度有关系如图1.11.1所示题1.11.1图⎪⎪⎩⎪⎪⎨⎧====ααcos sin 2a dt dv a a r v a t n 两式相比得dtdvr v ⋅=ααcos 1sin 2 即2cot 1vdv dt r =α 对等式两边分别积分200cot 1v dv dt rv v t⎰⎰=α 即αcot 11rtv v -=此即质点的速度随时间而变化的规律.1.12证 由题1.11可知质点运动有关系式⎪⎪⎩⎪⎪⎨⎧==ααcos sin 2a dtdv a r v ①② 所以 ωθθθd dv dt d d dv dt dv =⋅=,联立①②,有ααωθcos sin 2r v d dv = 又因为r v ω=所以 θαd vdv cot =,对等式两边分别积分,利用初始条件0=t 时,0θθ=()αθθcot 00-=e v v1.13 证(a )当00=v ,即空气相对地面上静止的,有牵相绝v v v +=.式中绝v 质点相对静止参考系的绝对速度, 相v 指向点运动参考系的速度, 牵v 指运动参考系相对静止参考系的速度.可知飞机相对地面参考系速度:绝v =v ',即飞机在舰作匀速直线运动.所以飞机来回飞行的总时间v l t '=20. (b )假定空气速度向东,则当飞机向东飞行时速度01v v v +'=飞行时间1v v lt +'=当飞机向西飞行时速度0v v v v v -'=+=牵相飞行时间2v v lt -'=故来回飞行时间021v v l t t t +'=+=0v v l -'+222v v lv -''= 即2200220112v v t v v v lt '-='-'= 同理可证,当空气速度向西时,来回飞行时间2201v v t t '-=(c )假定空气速度向北.由速度矢量关系如题1.13.1图v 题1.13.1图v v v '+=0绝202v v v -'= 所以来回飞行的总时间222vv l t -'=2200220112v vt v v v l '-='-'=同理可证空气速度向南时,来回飞行总时间仍为2201v v t t '-=1.14解 正方形如题1.14.1图。

动力学第三章部分习题解答3-3 取套筒B 为动点,OA 杆为动系 根据点的复合运动速度合成定理r e a v v v +=可得:l v v ω==e 0a 30cos ,l v v v BC B ω332a === 研究AD 杆,应用速度投影定理有:030cos D A v v =,l v D ω334=再取套筒D 为动点,BC 杆为动系,根据点的复合运动速度合成定理r D BC D v v v +=将上式在x 轴上投影有:r D BC D v v v +-=-,l v v v BC D D ω332r =+-=3-4 AB 构件(灰色物体)作平面运动, 已知A 点的速度s A O v A /0cm 4510==ωAB 的速度瞬心位于C ,应用速度瞬心法有:rad/s 23==AC v A AB ω BC v AB B ω=,设OB 杆的角速度为ω,则有rad/s 415==OB v B ω 设P 点是AB 构件上与齿轮I 的接触点, 该点的速度:CP v AB P ω=齿轮I 的角速度为:rad/s 61==r v PI ω a v e vr vA vDv rD v A vB P v CAB ωI ω3-6 AB 杆作平面运动,取A 为基点 根据基点法公式有:BA A B v v v +=将上式在AB 连线上投影,可得0,01==B O B v ω因此,041ωω==AB v A AB因为B 点作圆周运动,此时速度为零,因此只有切向加速度(方向如图)。
根据加速度基点法公式n t BA BAA B aaa a ++=将上式在AB 连线上投影,可得n060cos BA A B a a a +=-,r a B 205.2ω-=201231ωα-==B O a B B O (瞬时针)3-7 齿轮II 作平面运动,取A 为基点有nt BA BA A B a a a a ++= n t 1BA BA a a a a ++=将上式在x 投影有:n 1cos BA a a a -=-β由此求得:212n 2cos 2r a a r a BAII βω+==再将基点法公式在y 轴上投影有:2t2sin r a a II BA αβ==,由此求得22sin r a II βα=再研究齿轮II 上的圆心,取A 为基点n t n t2222A O AO A O O aaa aa++=+将上式在y 轴上投影有2sin 2t t 22βαa r a a II AO O ===, B vBAv A vAa Ba t BA an BA atBA anBA axyt2A Oa n 2AO a xyn 2O a t 2Oa由此解得:)(2sin 2121t 221r r a r r a OO O +=+=βα再将基点法公式在x 轴上投影有:n1n22A O O a a a -=- 由此解得:2cos 1n2a a a O -=β,又因为221n 212)(O O O r r a ω+= 由此可得:)(2cos 21121r r a a O O +-±=βω3-9 卷筒作平面运动,C 为速度瞬心, 其上D 点的速度为v ,卷筒的角速度为r R vDC v -==ω 角加速度为rR ar R v -=-== ωα 卷筒O 点的速度为:rR vRR v O -==ω O 点作直线运动,其加速度为 rR aRr R R v va O O -=-==研究卷筒,取O 为基点,求B 点的加速度。
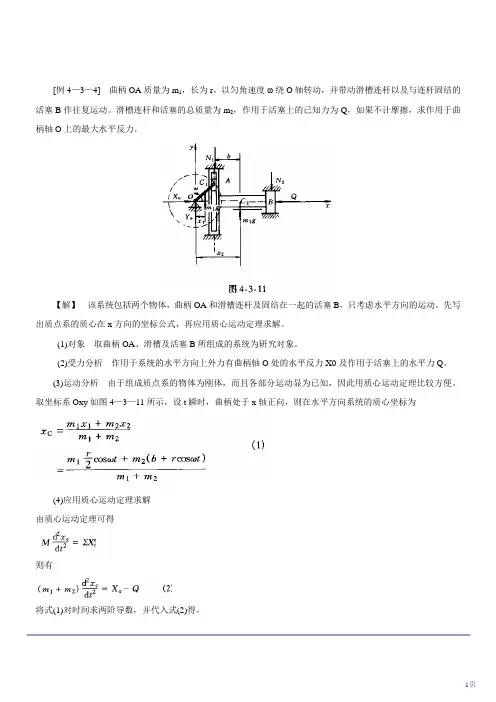
[例4—3—4] 曲柄OA质量为m1,长为r,以匀角速度ω绕O轴转动,并带动滑槽连杆以及与连杆固结的活塞B作往复运动。
滑槽连杆和活塞的总质量为m2,作用于活塞上的已知力为Q,如果不计摩擦,求作用于曲柄轴O上的最大水平反力。
【解】该系统包括两个物体,曲柄OA和滑槽连杆及固结在一起的活塞B,只考虑水平方向的运动。
先写出质点系的质心在x方向的坐标公式,再应用质心运动定理求解。
(1)对象取曲柄OA、滑槽及活塞B所组成的系统为研究对象。
(2)受力分析作用于系统的水平方向上外力有曲柄轴O处的水平反力X0及作用于活塞上的水平力Q。
(3)运动分析由于组成质点系的物体为刚体,而且各部分运动显为已知,因此用质心运动定理比较方便。
取坐标系Oxy如图4—3—11所示,设t瞬时,曲柄处于x轴正向,则在水平方向系统的质心坐标为(4)应用质心运动定理求解由质心运动定理可得则有将式(1)对时间求两阶导数,并代入式(2)得,当ωt=π时,X0达到最大值,为[例4-3-5] 小车A重Q,下悬一摆如图4—3—12所示。
摆按规律φ=φ0sinkt摆动,设摆锤B重为P,摆长为J,摆杆重量及各处摩擦均忽略不计。
若运动开始时系统的质心速度等于零,试求小车的运动方程。
[解] 以小车和摆锤所组成的质点系为研究对象。
作用于该质点系上的外力有重力P、Q和轨道的铅垂反力N。
选取坐标Oxy如图所示,y轴通过系统的质心C。
由于作用于该质点系上的所有外力在x方向上的投影的代数和等于零,因此质点系的质心的运动沿c方向守恒,即v cx=常量。
又因系统原来是静止的,所以vcx=dxc/dt=0,xc=常量,因此质点系的质心的水平位置应保持不变,由于y轴通过质心,故xc=0。
当摆锤至任意位置时,质点系质心坐标为既由图示坐标关系得将式(3)代入式(2)得式(4)即为小车的运动方程。
(四)解题注意事项:1.由于动量定理与质心运动定理均由牛顿定律导得,故定理中的运动量(速度、加速度等)必须是相对惯性参考系的。
第三章思考题解答3.1 答:确定一质点在空间中得位置需要3个独立变量,只要确定了不共线三点的位置刚体的位置也就确定了,故须九个独立变量,但刚体不变形,此三点中人二点的连线长度不变,即有三个约束方程,所以确定刚体的一般运动不需3n 个独立变量,有6个独立变量就够了.若刚体作定点转动,只要定出任一点相对定点的运动刚体的运动就确定了,只需3个独立变量;确定作平面平行运动刚体的代表平面在空间中的方位需一个独立变量,确定任一点在平面上的位置需二个独立变量,共需三个独立变量;知道了定轴转动刚体绕转动轴的转角,刚体的位置也就定了,只需一个独立变量;刚体的平动可用一个点的运动代表其运动,故需三个独立变量。
3.2 答物体上各质点所受重力的合力作用点即为物体的重心。
当物体的大小远小于地球的线度时物体上各质点所在点的重力加速度都相等,且方向彼此平行即重力场为均匀场,此时质心与重心重合。
事实上但物体的线度很大时各质点所在处g 的大小是严格相等,且各质点的重力都指向地心,不是彼此平行的,重心与质心不和。
答 当物体为均质时,几何中心与质心重合;当物体的大小远小于地球的线度时,质心与重心重合;当物体为均质且大小远小于地球的线度时,三者都重合。
3.4 答 主矢F 是力系各力的矢量和,他完全取决于力系中各力的大小和方向,故主矢不随简化中心的位置而改变,故而也称之为力系的主矢;简化中心的位置不同,各力对简化中心的位矢i r 也就不同则各力对简化中心的力矩也就不同,故主矩随简化中心的位置而变,被称之为力系对简化中心的主矩。
分别取O 和O '为简化中心,第i 个力i F 对O 和O '的位矢分别为i r 和i r ',则i r =i r '+O O ',故()()iii ii i O F O O r F r M ⨯'-'=⨯'=∑∑'()∑∑⨯'-⨯'=ii ii i F O O F r ∑⨯'+=ii o F O O M即o o M M ≠'主矢不变,表明刚体的平动效应不变,主矩随简化中心的位置改变,表明力系的作用对刚体上不同点有不同的转动效应,但不改变整个刚体的转动规律或者说不影响刚体绕质心的转动。
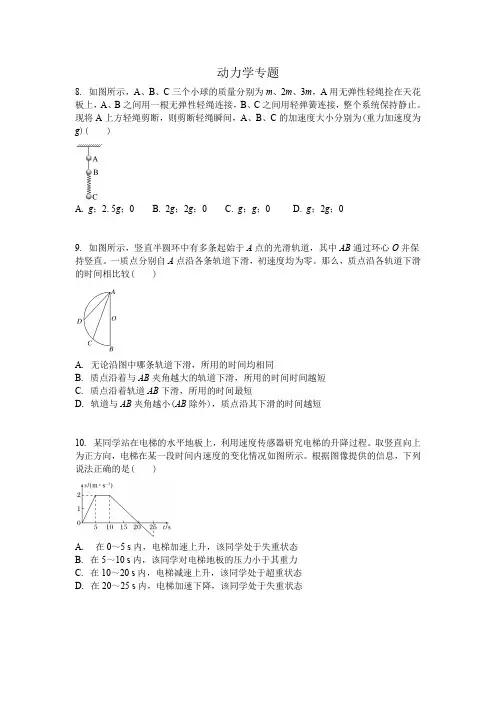
动力学专题
8.如图所示,A、B、C三个小球的质量分别为m、2m、3m,A用无弹性轻绳拴在天花板上,A、B之间用一根无弹性轻绳连接,B、C之间用轻弹簧连接,整个系统保持静止。
现将A上方轻绳剪断,则剪断轻绳瞬间,A、B、C的加速度大小分别为(重力加速度为g)()
A.g;2.5g;0
B.2g;2g;0
C.g;g;0
D.g;2g;0
9.如图所示,竖直半圆环中有多条起始于A点的光滑轨道,其中AB通过环心O并保持竖直。
一质点分别自A点沿各条轨道下滑,初速度均为零。
那么,质点沿各轨道下滑的时间相比较()
A.无论沿图中哪条轨道下滑,所用的时间均相同
B.质点沿着与AB夹角越大的轨道下滑,所用的时间时间越短
C.质点沿着轨道AB下滑,所用的时间最短
D.轨道与AB夹角越小(AB除外),质点沿其下滑的时间越短
10.某同学站在电梯的水平地板上,利用速度传感器研究电梯的升降过程。
取竖直向上为正方向,电梯在某一段时间内速度的变化情况如图所示。
根据图像提供的信息,下列说法正确的是()
A.在0~5s内,电梯加速上升,该同学处于失重状态
B.在5~10s内,该同学对电梯地板的压力小于其重力
C.在10~20s内,电梯减速上升,该同学处于超重状态
D.在20~25s内,电梯加速下降,该同学处于失重状态。
第三篇动力学一、选择题(每题2分,共20分)1。
在铅直面内得一块圆板上刻有三道直槽AO,BO,CO,三个质量相等得小球M1,M2,M3在重力作用下自静止开始同时从A,B,C三点分别沿各槽运动,不计摩擦,则________到达O 点、(A)M1小球先; (B)M2小球先; (C)M3小球先; (D)三球同时。
题1 题2 题32、质量分别为m1=m,m2=2m得两个小球M1,M2用长为L而重量不计得刚杆相连。
现将M1置于光滑水平面上,且M1M2与水平面成角。
则当无初速释放,M2球落地时,M1球移动得水平距离为____________。
(A);ﻩﻩ(B);ﻩﻩ(C);ﻩﻩ(D)0。
3、质量为m,长为b得匀质杆OA,以匀角速度ω绕O轴转动。
图示位置时,杆得动量及对O 轴得动量矩得大小为________。
(A),; (B),;(C),;ﻩ(D),。
4.在_____情况下,跨过滑轮得绳子两边张力相等,即F1=F2(不计轴承处摩擦)。
(A)滑轮保持静止或以匀速转动或滑轮质量不计;(B)滑轮保持静止或滑轮质量沿轮缘均匀分布;(C)滑轮保持静止或滑轮质量均匀分布;(D)滑轮质量均匀分布。
题4 题55.均质杆长L,重P,均质圆盘直径D=L,亦重P,均放置在铅垂平面内,并可绕O轴转动。
初始时杆轴线与圆盘直径均处于水平位置,而后无初速释放,则在达到图示位置瞬时,杆得角速度ω1________圆盘得角速度ω2。
(A)大于;ﻩ(B)小于; (C)等于;ﻩ(D)小于或等于。
6.均质杆AB,长L,质量m,沿墙面下滑,已知A端速度,B端高度h,AB对过杆端A,质心C,瞬心I得水平轴得转动惯量分别为JA,J C,J I,则图示瞬时杆得动能为__________、(A); (B); (C);(D)题6题7 题87.已知均质杆长L,质量为m,端点B得速度为,则AB杆得动能为___________。
(A);ﻩﻩ(B);ﻩ(C); (D)8、质量为m1得均质杆OA,一端铰接在质量为m2得均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动。