合成孔径雷达技术.ppt
- 格式:ppt
- 大小:1.99 MB
- 文档页数:23
第四章 合成孔径雷达合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最多,也是本书讨论的重点。
在前几章对雷达如何获取高的距离分辨率和横向分辨的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。
首先,结合工程实际介绍合成孔径雷达的原理。
在前面的讨论中已经提到,根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以及工程实现方面的问题。
合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。
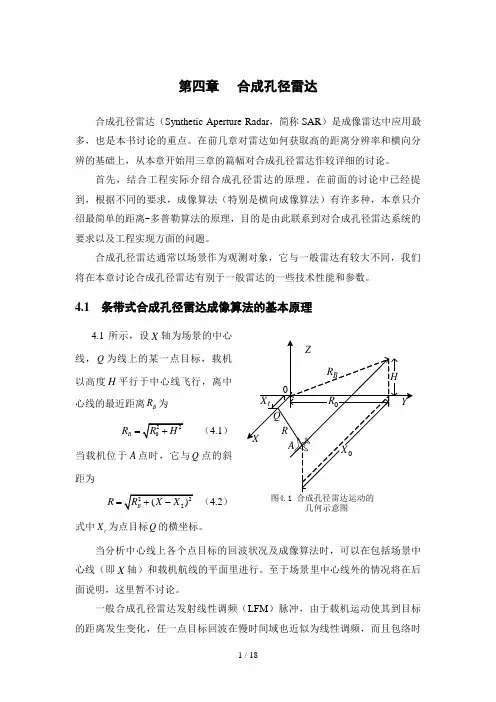
4.1 条带式合成孔径雷达成像算法的基本原理4.1所示,设X 轴为场景的中心线,Q 为线上的某一点目标,载机以高度H 平行于中心线飞行,离中心线的最近距离B R 为B R = (4.1) 当载机位于A 点时,它与Q 点的斜距为R = (4.2) 式中t X 为点目标Q 的横坐标。
当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心线(即X 轴)和载机航线的平面里进行。
至于场景里中心线外的情况将在后面说明,这里暂不讨论。
一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时图4.1 合成孔径雷达运动的 几何示意图延也随距离变化,即所谓距离徙动。
合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。
严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。
在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。
所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。