机械原理齿轮系及其设计
- 格式:pptx
- 大小:1.08 MB
- 文档页数:50
第11章 齿轮系及其设计11.1 复习笔记本章主要介绍了定轴轮系、周转轮系和复合轮系的传动比计算,轮系的功用,以及行星轮系的效率、齿数的确定。
学习时需要重点掌握轮系传动比的计算,尤其是复合轮系的分析计算,常以计算题的形式考查。
除此之外,轮系的类型和功用、行星轮系中各齿数的确定(需要满足4个条件)等内容,常以选择题和填空题的形式考查,复习时需要把握其具体内容,重点记忆。
一、齿轮系及其分类1.定义齿轮系是由一系列的齿轮所组成的齿轮传动系统,简称轮系。
2.分类根据轮系运转时各个齿轮的轴线相对于机架的位置是否固定,将轮系分为三大类:(1)定轴轮系运转时各个齿轮的轴线相对于机架的位置都是固定的轮系称为定轴轮系。
(2)周转轮系(见表11-1-1)表11-1-1 周转轮系图11-1-1 周转轮系二、定轴轮系的传动比(见表11-1-2)表11-1-2 定轴轮系的传动比三、周转轮系的传动比1.周转轮系的传动比设周转轮系中的两个太阳轮分别为m 和n ,行星架为H ,则其转化轮系的传动比i mn H 可表示为H Hm m H mn H n n Hm nm nωωωi ωωω-==-=±在转化轮系中由至各从动轮齿数的乘积在转化轮系中由至各主动轮齿数的乘积2.具有固定轮的行星轮系的传动比具有固定轮的行星轮系,设固定轮为n ,即ωn =0,则有i mn H =(ωm -ωH )/(0-ωH )=-i mH +1,即i mH =1-i mn H 。
四、复合轮系的传动比1.计算步骤(1)将各部分的周转轮系和定轴轮系一一分开;(2)分别列出其传动比计算式;(3)联立求解。
2.划分周转轮系(1)先要找到轮系中的行星轮和行星架(注意:轮系中行星架往往由其他功用的构件所兼任);(2)每一行星架以及连同行星架上的行星轮和与行星轮相啮合的太阳轮组成一个基本周转轮系;(3)当将所有的基本周转轮系部分找出之后,剩下的便是定轴轮系部分。

机械设计基础课件!齿轮机构H机械设计基础课件:齿轮机构一、引言齿轮机构是机械设计中应用最广泛的一种传动机构,其结构简单、传动效率高、可靠性好,广泛应用于各种机械设备中。
齿轮机构由齿轮副组成,包括齿轮、轴、轴承等零部件。
本课件将介绍齿轮机构的基本原理、分类、传动比计算、齿轮啮合条件、齿轮强度计算等内容。
二、齿轮机构的基本原理齿轮机构是利用齿轮的啮合来实现两轴之间的运动和动力传递的装置。
当两个齿轮啮合时,主动齿轮转动,通过齿轮啮合将动力传递给从动齿轮,从而实现运动的传递。
齿轮的啮合原理是基于齿廓曲线的几何关系,齿廓曲线是齿轮啮合的基础。
三、齿轮机构的分类齿轮机构根据齿轮的形状和布置方式可以分为多种类型,常见的有直齿轮机构、斜齿轮机构、蜗轮蜗杆机构等。
1.直齿轮机构:直齿轮机构是齿轮齿面与轴线垂直的齿轮机构,其传动平稳、噪音低,但承载能力相对较小。
2.斜齿轮机构:斜齿轮机构是齿轮齿面与轴线呈一定角度的齿轮机构,其传动效率高、承载能力强,但噪音相对较大。
3.蜗轮蜗杆机构:蜗轮蜗杆机构是利用蜗杆和蜗轮的啮合来实现传动的,其传动比大、传动平稳,但效率相对较低。
四、齿轮机构的传动比计算齿轮机构的传动比是指主动齿轮与从动齿轮转速的比值。
传动比的计算公式为:传动比=从动齿轮齿数/主动齿轮齿数在实际应用中,根据工作需求确定传动比,然后根据传动比选择合适的齿轮齿数,以满足设计要求。
五、齿轮啮合条件1.齿廓重合条件:齿轮啮合时,齿廓必须保持连续接触,避免齿廓间的冲击和滑动。
2.齿顶隙条件:齿轮啮合时,齿顶之间应保持一定的间隙,以避免齿顶干涉。
3.齿根隙条件:齿轮啮合时,齿根之间应保持一定的间隙,以避免齿根干涉。
4.齿侧隙条件:齿轮啮合时,齿侧之间应保持一定的间隙,以允许润滑油的进入和排出。
六、齿轮强度计算齿轮强度计算是齿轮设计的重要环节,主要包括齿面接触强度计算和齿根弯曲强度计算。
1.齿面接触强度计算:齿面接触强度计算是确定齿轮齿面接触应力是否满足材料屈服极限的要求。
第11章齿轮系及其设计11.1复习笔记一、齿轮系及其分类1.定义由一系列的齿轮所组成的齿轮传动系统称为齿轮系,简称轮系。
2.分类根据轮系运转时各个齿轮的轴线相对于机架的位置是否固定,将轮系分为三大类:(1)定轴轮系运转时各个齿轮的轴线相对于机架的位置都是固定的轮系称为定轴轮系。
(2)周转轮系①定义如图11-1-1所示,运转时至少有一个齿轮轴线的位置不固定,而是绕着其他齿轮的固定轴线回转的轮系称为周转轮系。
图11-1-1周转轮系②基本构件在周转轮系中,一般都以太阳轮和行星架作为输入和输出构件,称为周转轮系的基本构件。
a.太阳轮轮系中绕固定轴回转的齿轮称为太阳轮。
如图11-1-1中齿轮l和内齿轮3都围绕着固定轴线OO回转,则齿轮1和内齿轮3为太阳轮;b.行星轮不仅绕自身轴线作自转,还随着行星架一起绕固定轴线做公转的齿轮称为行星轮。
如图11-1-1中齿轮2,其中构件H为行星架,又称转臂或系杆。
③分类a.根据其自由度的数目分类第一,差动轮系自由度为2的周转轮系称为差动轮系;第二,行星轮系自由度为1的周转轮系称为行星轮系。
b.根据基本构件的不同分类若轮系中的太阳轮以K表示,行星架以H表示,则如图11-1-1所示的轮系称为2K-H 型周转轮系。
(3)复合轮系既包含定轴轮系部分,又包含周转轮系部分,或者是由几部分周转轮系组成的轮系称为复合轮系。
二、定轴轮系的传动比1.轮系传动比的定义轮系的传动比是指轮系中首、末两构件的角速度之比。
2.传动比计算(1)定轴轮系的传动比等于组成该轮系的各对啮合齿轮传动比的连乘积;(2)传动比又等于各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,即:定轴轮系的传动比=所有从动轮齿数的连乘积/所有主动轮齿数的连乘积3.首、末轮转向关系的确定(1)转向的确定①齿轮的转向可用箭头表示,箭头方向表示齿轮可见侧的圆周速度的方向;②标志一对啮合传动的齿轮转向的箭头为同时指向节点或同时背离节点;③当首、末两轮的轴线彼此平行时,两轮的转向不是相同就是相反;当两者的转向相同时,规定其传动比为“+”,反之为“-”;④若首、末两轮的轴线不平行,其间的转向关系只能在图上用箭头来表示。

华东理工大学网络教育学院机械原理课程阶段练习四(第8章—第10章—第11章)第八章 齿轮系及其设计一、填空题1、周转轮系根据自由度不同可分为 差动轮系 和 行星轮系 ,其自由度分别为 2 和 1 。
2、组成周转轮系的基本构件有: 太阳轮 ; 行星轮 , 系杆 。
3、K i 1与H K i 1不同,K i 1是 构件1和K 的传动比 ;HK i 1是 构件1和K 相对系杆H 的传动比 。
二、简答题1、什么是复合轮系?写出计算复合轮系传动比的步骤。
复合轮系:由定轴轮系和周转轮系或者由两个以上的周转轮系组成的轮系。
步骤:(1)划清组成复合轮系中的定轴轮系和周转轮系;(2)分别采用定轴轮系和周转轮系传动比的计算公式列出计算方程式; (3)根据这些轮系的组合方式联立解出所求的传动比。
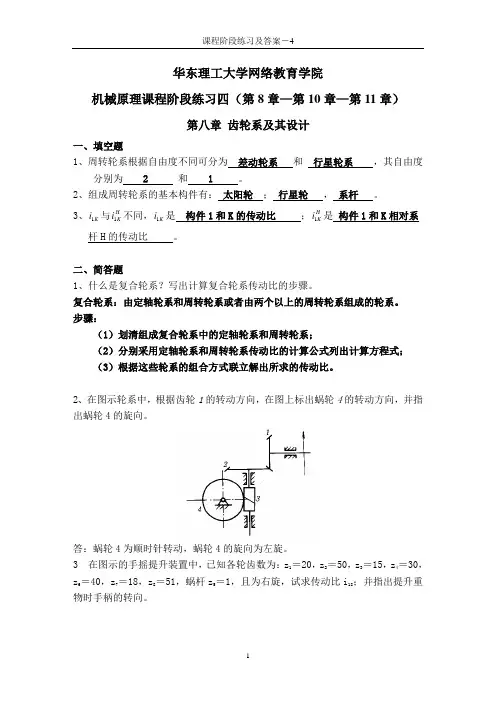
2、在图示轮系中,根据齿轮1的转动方向,在图上标出蜗轮4的转动方向,并指出蜗轮4的旋向。
答:蜗轮4为顺时针转动,蜗轮4的旋向为左旋。
3 在图示的手摇提升装置中,已知各轮齿数为:z 1=20,z 2=50,z 3=15,z 4=30,z 6=40,z 7=18,z 8=51,蜗杆z 5=1,且为右旋,试求传动比i 18;并指出提升重物时手柄的转向。
答:所示轮系为定轴轮系;各轮转向为:8-逆时针、7-顺时针、4-箭头向左、3-箭头向上、2-箭头向上、1-箭头向上;传动比:67.56618=i4 在图示的蜗杆传动中,试分别在左右两图上标出蜗杆1的旋向和转向。
答:左图为右旋蜗杆;右图蜗杆逆时针转动。
三 计算题1 在图示的轮系中,已知z 1=20,z 2=30,z 3=18,z 6=48,齿轮1的转速n 1=150 r/min ,试求系杆 H 的转速n H 的大小和方向。
1.667.534124114-=⨯-=--=Z Z Z Z i H H Hωωωω因为:04=ω所以:667.511+=Hωω m in/5.22r H =ω2、在图中,已知:Z 1=20 ,Z 2=30 ,Z 2’=25,Z 3=75,Z 4=30,Z5=25,。
泰州学院机械原理及其计算机辅助
第6章
6.1 轮系的类型
轮系(多齿轮的传动装置)的分类
分类定轴轮系
周转轮系
复合轮系
平面轮系
空间轮系
行星轮系
差动轮系
定轴轮系
1轮系运转时,如果各齿轮轴线的位置都固定不动,则称之为定轴轮系(或称为普通轮系)。
3
124
轮系运转时,至少有一
个齿轮轴线的位置不固定,
而是绕某一固定轴线回转,
则称该轮系为周转轮系。
3
2
13
4123442
1
差动轮系行星轮系
周转轮系
2
复合轮系3既包括定轴轮系,又包括周转轮系,或由多个基本周转轮系组成的轮系,称为复合轮系。
4
3
5
H
1
2定轴轮系周转轮系6123H 145H 2周转轮系1
周转轮系2
谢谢!。
一、教案基本信息机械原理课程教案—齿轮机构及其运动设计课时安排:2学时教学目标:1. 了解齿轮机构的基本概念和分类。
2. 掌握齿轮的啮合条件和传动比计算。
3. 能够分析齿轮机构的运动设计。
教学方法:1. 讲授:讲解齿轮机构的基本概念、分类和啮合条件。
2. 案例分析:分析齿轮机构的运动设计实例。
3. 互动讨论:引导学生探讨齿轮机构设计中的关键问题。
教学内容:1. 齿轮机构的基本概念和分类2. 齿轮的啮合条件3. 传动比计算4. 齿轮机构的运动设计5. 齿轮机构设计实例分析二、教学过程1. 导入:通过展示齿轮机构的图片,引导学生思考齿轮机构在机械系统中的应用和重要性。
2. 讲解齿轮机构的基本概念和分类:解释齿轮机构的特点、工作原理和分类。
3. 讲解齿轮的啮合条件:介绍齿轮啮合的基本条件,如齿数、模数、压力角等。
4. 讲解传动比计算:解释传动比的定义和计算方法,引导学生理解传动比在齿轮机构中的作用。
5. 案例分析:分析齿轮机构的运动设计实例,如减速器和变速器的设计。
6. 互动讨论:引导学生探讨齿轮机构设计中的关键问题,如啮合条件、传动比选择等。
三、教学评估1. 课堂提问:通过提问了解学生对齿轮机构的基本概念和分类的理解。
2. 作业布置:布置有关齿轮啮合条件和传动比计算的练习题,巩固所学知识。
3. 课程报告:要求学生分析一个齿轮机构的运动设计实例,评估其设计合理性。
四、教学资源1. 教材:机械原理教材相关章节。
2. 图片:齿轮机构的图片。
3. 视频:齿轮机构的运动原理视频。
4. 练习题:相关齿轮啮合条件和传动比计算的练习题。
五、教学延伸1. 深入学习其他齿轮机构的分类,如蜗轮蜗杆机构、行星齿轮机构等。
2. 研究齿轮机构的运动仿真,深入了解其运动特性和性能。
3. 探索齿轮机构在实际工程应用中的设计和优化方法。
六、教学过程7. 讲解齿轮机构的运动设计:介绍齿轮机构运动设计的方法和步骤,包括运动传递分析、齿轮尺寸计算等。