霍尔传感器A44E在车轮测速中的应用研究
- 格式:pdf
- 大小:291.07 KB
- 文档页数:3

届.别. 2013届学号毕业设计基于单片机设计的自行车测速系统姓名系别、专业导师姓名、职称完成时间1目录摘要 .............................................................. 3矚慫润厲钐瘗睞枥庑赖。
Abstract............................................................ 3聞創沟燴鐺險爱氇谴净。
1 绪论 ........................................................... 4残骛楼諍锩瀨濟溆塹籟。
1.1 课题背景 ................................................. 5酽锕极額閉镇桧猪訣锥。
1.2 课题主要任务及内容........................................ 5彈贸摄尔霁毙攬砖卤庑。
1.3 任务分析与实现............................................ 5謀荞抟箧飆鐸怼类蒋薔。
2 系统设计 ....................................................... 6厦礴恳蹒骈時盡继價骚。
2.1 硬件方案设计.............................................. 6茕桢广鳓鯡选块网羈泪。
2.2 软件方案设计.............................................. 7鹅娅尽損鹌惨歷茏鴛賴。
2.3 硬件电路设计.............................................. 8籟丛妈羥为贍偾蛏练淨。
2.3.1 概述................................................ 8預頌圣鉉儐歲龈讶骅籴。

基于单片机的自行车测速系统设计【摘要】本文主要是对测速系统的设计与应用进行了研究,以单片机为核心,利用A44E霍尔传感器设计出一种可以即时显示速度和路程的测速系统,并用液晶显示器LCD1602显示出来。
【关键词】传感器;单片机;即时测速1.前言随着人们对低碳生活的追求,特别是在交通拥挤的城市,自行车成为代步及休闲运动的工具。
因此爱好自行车运动的人十分需要一款能测速的装置,以便更好知道自己的运动情况。
2.总体设计整个系统是以单片机作为控制模块,其工作原理是:A44E霍尔传感器检测自行车的轮胎的运转情况,将不同的车速转变成不同的频率的脉冲信号输入到单片机进行处理和计算,最后把即时信息显示在LCD1602液晶显示器上,让人们清楚知道当前的速度、累计运动时间和路程等物理量,系统的总框图如图1所示。
我们先把磁铁放在自行车的车轮上,而霍尔传感器就放在车架,转动自行车的转轴,磁铁也就跟着一起转动,从而使霍尔传感器周围的磁场发生变化,传感器在磁钢经过时,产生一个脉冲低电压,记录自行车转动了一周。
将霍尔传感器的输出引脚与单片机的P3.2脚相连。
测速度的原理:定义测量的时间间隔为,自行车车轮转过的圈数。
假设车轮周长为,则速度为:,在中断子程序里调用时钟函数,实现时间的累加,最后在中断子程序里输出累计时间,速度和路程。
图1 测速系统总框图3.硬件选择整个系统包括了三大部分,分别是:传感器模块、单片机模块以及显示模块。
3.1 传感器的选择A44E霍尔开关集成电路应用霍尔效应原理,其输入为磁感应强度,输出是一个数字电压讯号,霍尔传感器A44E 在测速系统中的主要作用是对车轮转速信息进行采集。
它具有一致性好、性能稳定、可靠性高、响应速度快、安装简便,可和各种逻辑电路接口直接对接的特点。
3.2 单片机的选择本文选用的控制模块是AT89C52单片机,AT89C52是低电压,高性能CMOS 8位单片机,片内含8K bytes的可反复擦写的只读程序存储器(PEROM)和256 bytes 的随机存取数据存储器(RAM),与标准MCS-51指令系统及8052产品引脚兼容,片内置通用8位中央处理器(CPU)和Flash存储单元,功能强大,适合于复杂控制应用场合。

霍尔原理在汽车中的应用1. 什么是霍尔原理霍尔原理,又称霍尔效应,是指当电流通过一定材料中的导线时,如果在垂直于电流方向的平面内施加一个磁场,就会在导线两侧产生电势差。
1.1 霍尔效应的原理当电流从导线通过时,由于导线自身存在的电阻和磁场的作用,导线两侧分别形成了电势差。
这个电势差正比于电流和垂直磁场的乘积,并且与导线长度成正比。
这种现象称为霍尔效应。
1.2 霍尔元件为了测量霍尔效应产生的电势差,人们设计了专门的元件 - 霍尔元件。
霍尔元件通过将霍尔效应与导线相结合,能够产生一个与磁场强度成正比的输出电压。
2. 霍尔原理在汽车中的应用由于霍尔元件对磁场的敏感性,因此它在汽车行业中有着广泛的应用。
以下是一些汽车领域中运用了霍尔原理的实际案例:2.1 汽车速度传感器汽车速度传感器是利用霍尔原理来感知车轮转动速度的设备。
在传感器中,通过将霍尔元件安装在车轮轴上,并配合磁铁固定在车轮上,当车轮转动时,磁铁附近的磁场会影响到霍尔元件。
由于霍尔元件对于磁场敏感,当车轮转动时,磁场也会随之变化。
通过测量霍尔元件输出的电压变化,可以计算出车轮的转动速度,并传送给车辆的电控单元。
2.2 发动机点火系统在汽车的发动机点火系统中,霍尔元件通常被用于检测曲轴位置。
发动机点火系统中的霍尔元件被称为曲轴霍尔传感器。
曲轴霍尔传感器通过监测曲轴的转动来确定汽缸是否处于点火位置。
当曲轴转过特定角度时,霍尔元件会感知到磁场的变化,并输出响应的电信号。
这个信号会告诉点火系统合适的时机进行点火。
2.3 制动传感器制动传感器是一种应用了霍尔原理的安全设备。
它被安装在汽车制动系统的主要组件或制动蹄片上,并通过感知磁场的变化来确认制动器的位置。
制动传感器可以提供准确的制动器状态信息,从而方便车辆的电控单元监测和控制制动系统的运行。
这对于实现汽车的智能制动和安全性能至关重要。
3. 霍尔原理的优势在汽车领域中,与传统的机械式传感器相比,采用霍尔原理的传感器具有一些明显的优势:•精度高:霍尔元件能够精确测量和输出磁场变化的电信号,因此其测量结果更加准确。

基于霍尔元件的自行车速度感应器设计随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。
本论文主要阐述一种基于霍尔元件的自行车的速度里程表的设计。
以AT89C52单片机为核心,A44E霍尔传感器测转数,实现对自行车里程/速度的测量统计,采用24C02实现在系统掉电的时候保存里程信息,并能将自行车的里程数及速度用LED实时显示。
文章详细介绍了自行车的速度里程表的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:里程/速度;霍尔元件;单片机;LED显示ABSTRACTWith the developing of people 'lisfe, the bicycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. The bicycle mileage/speed can fulfill the basic need of people ' s life, so that they can learn the speed and the mileage of the bicycle. In this paper, the bicycle mileage/speed design based on the Hall element is elaborated. By AT89C52 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range information is saved by24C02 when the power is off, the bicycle speed can be displayed on LED. In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language; the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meets the demand of design.KEY WORDS: Mileage / speed; Hall element; Single chip microcomputer; LED1绪言 (1)1.1课题背景 (1)1.2课题的主要任务及内容 (1)2自行车的速度里程表总体方案设计 (2)2.1任务分析与实现 (2)2.2自行车的速度里程表硬件方案设计 (2)2.3自行车的速度里程表软件方案设计 (4)3自行车的速度里程表硬件电路设计 (5)3.1概述3.2传感器及其测量系统 (5)3.2.1 霍尔传感器的测量原理 (5)3.2.2集成开关型霍尔传感器 (6)3.3单片机的原理及应用 (7)3.3.1单片机原理简介 (7)3.3.2单片机的引脚功能介绍................ 错误!未定义书签3.3.3单片机中断系统介绍.................. 错误!未定义书签3.3.4单片机定时/计数功能介绍 ............... 错误!未定义书签3.4其他器件的介绍..................... 错误!未定义书签3.4.1存储器的介绍..................... 错误!未定义书签3.4.2 74LS74芯片的介绍................ 错误!未定义书签3.4.3 74LS244芯片的介绍................ 错误!未定义书签3.5单片机外围电路的设计................. 错误!未定义书签3.5.1时钟电路的设计.................. 错误!未定义书签3.5.2 复位电路的设计.................. 错误!未定义书签3.5.3显示电路的设计................... 错误!未定义书签3.5.4报警电路的设计.................. 错误!未定义书签4自行车的速度里程表软件程序设计.............. 错误!未定义书签4.1概述.......................... 错误!未定义书签4.2自行车的速度里程表总体程序设计............. 错误!未定义书签4.3中断子程序的设计..................... 错误!未定义书签4.4数据处理子程序的设计.................. 错误!未定义书签4.5显示子程序的设计..................... 错误!未定义书签5系统调试与分析....................... 错误!未定义书签5.1系统仿真调试..................... 错误!未定义书签5.2调试故障及原因分析................... 错误!未定义书签6结论与展望......................... 错误!未定义书签6.1结论.......................... 错误!未定义书签6.2展望.......................... 错误!未定义书签致谢............................. 错误!未定义书签参考文献........................... 错误!未定义书签附录............................. 错误!未定义书签1.1课题背景自行车被发明及使用到现在已有两百多年的历史,这两百年间人类在不断的尝试与研发过程中,将玩具式的木马车转换到今日各式新颖休闲运动自行车,自行车发展的目的也从最早的交通代步的工具转换成休闲娱乐运动的用途。

霍尔传感器在机车测速中的应用测速装置在机车控制系统中占有非常重要的地位,对侧速装置的要求是分辨能力强、高精度和尽可能短的检测时间。
介绍了应用霍尔传感器通过测量磁场强度,来得到稳定的脉冲方波信号,实现机车转速的测量。
霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点,在机车控制系统中占有非常重要的地位。
对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。
发电机转速的检测方案可分成两类:用测速发电机检测或用脉冲发生器检测。
测速发电机的工作原理是将转速转变为电压信号,它运行可靠,但体积大,精度低,且由于测量值是模拟量,必须经过A/D转换后读入计算机。
脉冲发生器的工作原理是按发电机转速高低,每转发出相应数目的脉冲信号。
按要求选择或设计脉冲发生器,能够实现高性能检测。
所设计的基于霍尔元件的脉冲发生器要求成本低,构造简单,性能好。
在机车电气系统中存在着较为恶劣的电磁环境,因此要求产品本身要具有较强的抗干扰能力。
霍尔传感器的原理1.霍尔效应在一块半导体薄片上,其长度为l,宽度为b,厚度为d,当它被置于磁感应强度为B的磁场中,如果在它相对的两边通以控制电流I,且磁场方向与电流方向正交,则在半导体另外两边将产生一个大小与控制电流I和磁感应强度B乘积成正比的电势UH,即UH=KHIB,其中kH为霍尔元件的灵敏度。
该电势称为霍尔电势,半导体薄片就是霍尔元件。
2.工作原理霍尔开关集成电路中的信号放大器将霍尔元件产生的幅值随磁场强度变化的霍尔电压UH放大后再经信号变换器、驱动器进行整形、放大后输出幅值相等、频率变化的方波信号。
侧量磁场及工作设置1.测量磁场使用霍尔器件检测磁场的方法极为简单,将霍尔器件作成各种形式的探头,放在被测磁场中,因霍尔器件只对垂直子霍尔片表面的磁感应强度敏感,磁力线必须和器件表面垂直,通电后即可由输出电压得到被测磁场的磁感应强度。
若不垂直,则应求出其垂直分量来计算被测磁场的磁感应强度值。

单极开关型霍尔44E的引脚定义是什么?44E霍尔芯片的三脚应该是怎么接?霍尔44E怎么做磁极检测?霍尔YS44E在车轮转速检测中是怎么运作的?以上问题会在本文中为你一一讲解。
YS44E霍尔片属于开关型的霍尔器件,采用半导体集成技术制造的磁敏电路,它是由电压调整器、霍尔电压发生器、差分放大器、史密特触发器,温度补偿电路和集电极开路的输出级组成的磁敏传感电路, 其输入为磁感应强度,输出是一个数字电压信号。
天津越尔兴电子YS44E其工作电压范围比较宽(4.5~24 V) ,其输出的信号符合TTL 电平标准,可以直接接到单片机的I/ O 端口上,而且其最高检测频率可达到100KHz。
YS44E霍尔片的引脚及功能霍尔传感器YS44E霍尔片的引脚接线图见图所示。
越尔兴霍尔YS44E典型应用于无触点开关、汽车点火器、刹车电路、位置转速测与控制、安全报警装置和纺织控制系统。
霍尔传感器是一个3 端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC) 门输出,工作电压范围宽,使用非常方便。
引脚1 是电源V cc ,引脚2 是地GND , 引脚3 是输出OUT 。
霍尔器件的工作电压不得超过规定的V cc ,大部分霍尔开关均为OC 输出。
因此,输出应接负载电阻,其数值值取决于负载电流的大小,不得超负载使用。
YS44E霍尔片的磁输入检测YS44E的磁输入为单极磁场,即施加磁场的方式是改变磁铁和44E 之间的距离。
判定磁铁极性方法是:把磁铁的两个极分别靠近44E 的正面,当其OUT 引脚电平由高变低时即为正确的安装位置,如图所示。
YS44E判别磁铁极性经过实验得知,YS44E 只对磁铁的S 级有响应而对N 级没有丝毫响应。
安装时一定要让磁铁的S 级对准44E 的反应传感区。
霍尔元件YS44E 在测速系统中的主要作用是车轮转速采集。
车轮每转一周,磁铁经过44E 一次。
YS44E 的第3 脚就输出一个脉冲信号作为单片机AT89S52 的外中断信号,从P3. 2 口输入。

44e+霍尔元件+工作原理
霍尔元件是一种常用的电子器件,用于检测和测量电磁场的强度。
它基于霍尔效应工作原理。
霍尔效应是指当电流通过一片导体时,存
在磁场垂直地垂直于电流方向,则在该导体上会产生一种称为霍尔电
压的电势差。
霍尔元件通常包含一个导体平台,该平台上部署了一个薄片状的
半导体材料。
当电流通过此半导体时,磁场会使电子在半导体内部偏转,从而在导体两侧产生霍尔电压。
这种霍尔电压的大小与电流、磁
场的强度以及半导体材料的性质相关。
通过测量霍尔电压的大小,我们可以确定外加磁场的强度。
这使
得霍尔元件在许多应用中非常有用,例如磁场传感器、电流传感器等。
此外,霍尔元件具有快速响应、低功耗和高精度等优点,使其成为广
泛应用于电子设备中的关键元件。
总之,霍尔元件是一种基于霍尔效应工作的电子器件,可以用于
检测和测量电磁场的强度。
通过测量霍尔电压,可以确定外加磁场的
参数。
它在磁场传感器、电流传感器等领域具有广泛的应用,并且具
有快速响应、低功耗和高精度等优点。

A 04E
开关式霍尔传感器使用说明书
Tel :010-******** Website : E-mail :fae_61mcu@ 1
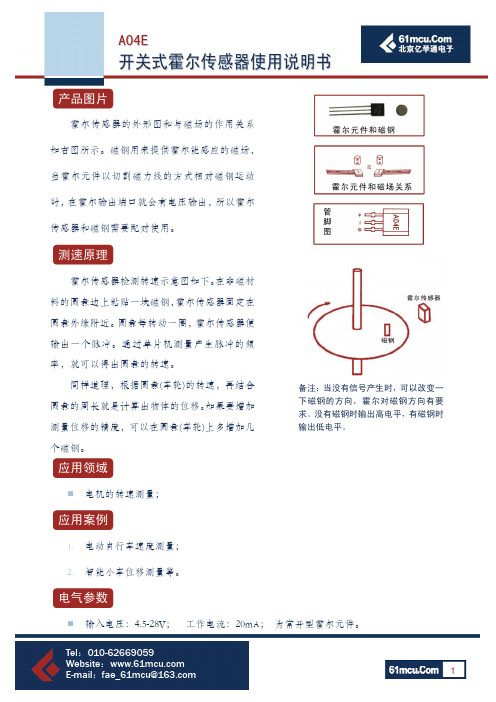
霍尔传感器的外形图和与磁场的作用关系如右图所示。
磁钢用来提供霍尔能感应的磁场,当霍尔元件以切割磁力线的方式相对磁钢运动时,在霍尔输出端口就会有电压输出,所以霍尔传感器和磁钢需要配对使用。
霍尔传感器检测转速示意图如下。
在非磁材
料的圆盘边上粘贴一块磁钢,霍尔传感器固定在圆盘外缘附近。
圆盘每转动一圈,霍尔传感器便输出一个脉冲。
通过单片机测量产生脉冲的频率,就可以得出圆盘的转速。
同样道理,根据圆盘(车轮)的转速,再结合圆盘的周长就是计算出物体的位移。
如果要增加测量位移的精度,可以在圆盘(车轮)上多增加几个磁钢。
电机的转速测量;
1.
电动自行车速度测量; 2. 智能小车位移测量等。
输入电压:4.5-28V; 工作电流:20mA; 为常开型霍尔元件。
电气参数 应用案例 应用领域 测速原理 产品图片 备注:当没有信号产生时,可以改变一下磁钢的方向,霍尔对磁钢方向有要求。
没有磁钢时输出高电平,有磁钢时输出低电平。

在线测试与故障诊断 电 子 测 量 技 术 EL ECTRON IC M EASUREM EN T TECHNOLO GY第32卷第10期2009年10月 霍尔传感器A44E 在车轮测速中的应用研究杨继生1 刘 芬2(1.天津第五机床厂 天津 300222;2.天津工程师范学院电子工程系 天津 300222)摘 要:在汽车行驶及机车控制系统中对测速装置的要求是分辨能力强、高精度、尽可能短的检测时间以及抗干扰能力强等。
该文介绍了一种应用霍尔传感器A44E 获得稳定的脉冲信号,从而实现对车速进行智能测量的方案。
测试结果表明,运用该方案实现的系统能很好的达到对车轮测速的要求。
关键词:霍尔传感器;速度测量;脉冲检测中图分类号:E911 文献标识码:AApplication study of hall sensor A44E in cart wheel πs resurverYang Jisheng 1 Liu Fen 2(1.Tianjin Fift h Machine Tool Works of China ,Tianjin 300222;2.Depart ment of Electronic Engineering ,Tianjin University of Technology Education ,Tianjin 300222)Abstract :Detecting speed equipment is one of great importance in both vehicle travel and engine control system.The requirement of speed 2detecting equipment is high resolution ability ,high precision ,strong ability to resist disturbance and as short detecting time as possible.This paper mainly introduces a implement proposal of using Hall sensor to get steady impulse signal of quadrilateral wave.The test results show that the designed circuits can implement the predefined f unctions.K eyw ords :Hall sensor ;rev survey ;pulse detection0 引 言脉冲计数法[1]是智能测速[2]系统中常用的方法。

Data Sheet 27621.6A*Always order by complete part number, e.g., A3141ELT .These Hall-effect switches are monolithic integrated circuits with tighter magnetic specifications, designed to operate continuously over extended temperatures to +150°C, and are more stable with both temperature and supply voltage changes. The unipolar switchingcharacteristic makes these devices ideal for use with a simple bar or rod magnet. The four basic devices (3141, 3142, 3143, and 3144) are identical except for magnetic switch points.Each device includes a voltage regulator for operation with supply voltages of 4.5 to 24 volts, reverse battery protection diode, quadratic Hall-voltage generator, temperature compensation circuitry, small-signal amplifier, Schmitt trigger, and an open-collector output to sink up to 25 mA. With suitable output pull up, they can be used with bipolar or CMOS logic circuits. The A3141– and A3142– are im-proved replacements for the UGN/UGS3140–; the A3144– is the improved replacement for the UGN/UGS3120–.The first character of the part number suffix determines the deviceoperating temperature range. Suffix ‘E–’ is for the automotive and industrial temperature range of -40°C to +85°C. Suffix ‘L–’ is for the automotive and military temperature range of -40°C to +150°C. Three package styles provide a magnetically optimized package for most applications. Suffix ‘–LT’ is a miniature SOT-89/TO-243AA transis-tor package for surface-mount applications; suffix ‘–U’ is a three-lead plastic mini-SIP, while suffix ‘–UA’ is a three-lead ultra-mini-SIP.FEATURES and BENEFITSs Superior Temp. Stability for Automotive or Industrial Applications s 4.5 V to 24 V Operation … Needs Only An Unregulated Supply s Open-Collector 25 mA Output … Compatible with Digital Logic s Reverse Battery Protections Activate with Small, Commercially Available Permanent Magnets s Solid-State Reliability s Small Sizes Resistant to Physical StressSENSITIVE HALL-EFFECT SWITCHES FOR HIGH-TEMPERATURE OPERATION3141 THRU 3144The A3141xU, A3142xU, A3143xU,and A3144xU are not for new design.3141 THRU 3144SENSITIVEHALL-EFFECT SWITCHESFOR HIGH-TEMP. OPERATION115 Northeast Cutoff, Box 15036Worcester, Massachusetts 01615-0036 (508) 853-5000MAGNETIC CHARACTERISTICS in gauss over operating supply voltage range.NOTES:Typical values are at T A = +25°C and V CC = 8 V.B OP = operate point (output turns ON); B RP = release point (output turns OFF); B hys = hysteresis (B OP - B RP ).*Complete part number includes a suffix to identify operating temperature range (E- or L-) and package type ( -LT, -U, or -UA).ELECTRICAL CHARACTERISTICS at V CC = 8 V over operating temperature range.LimitsCharacteristic Symbol Test ConditionsMin.Typ.Max.Units Supply VoltageV CC Operating 4.524V Output Saturation Voltage V OUT(SAT)I OUT = 20 mA, B > B OP 175400mV Output Leakage Current I OFF V OUT = 24 V, B < B RP <1.010µA Supply Current I CC B < B RP (Output OFF) 4.49.0mA Output Rise Time t r R L = 820 Ω, C L = 20 pF 0.04 2.0µs Output Fall Timet fR L = 820 Ω, C L = 20 pF0.18 2.0µsPart Numbers*A3141–A3142– A3143–A3144–Characteristic Min.Typ.Max.Min.Typ.Max.Min.Typ.Max.Min.Typ.Max.B OP at T A = 25°C5010016013018023022028034070350over operating temp. range 3010017511518024520528035535450B RP at T A = 25°C10451307512517516522528550330over operating temp. range 10451456012519015022530025430B hys at T A = 25°C2055803055803055802055over operating temp. range2055803055803055802055Copyright © 1993, 1999, Allegro MicroSystems, Inc.3141 THRU 3144SENSITIVEHALL-EFFECT SWITCHES FOR HIGH-TEMP . OPERATIONSUPPLY CURRENTSUPPLY CURRENT10152025SUPPLY VOLTAGE IN VOLTSDwg. GH-041-15S U P P L Y C U R R E N T I N m A255075AMBIENT TEMPERATURE IN °C-50Dwg. GH-039-1-25S U P P L Y C U R R E N T I N m ATYPICAL OPERATING CHARACTERISTICSA3142– SWITCH POINTSOUTPUT SATURATION VOLTAGE300AMBIENT TEMPERATURE IN °C200Dwg. GH-040-1S A T U R A T I O N V O L T A G E I N m V50100AMBIENT TEMPERATURE IN °C-50Dwg. GH-044S W I T C H P O I N T I N G A U S S3004002001001500-252575125* Complete part number includes a suffix denoting operating temperature range (E- or L-) and package type ( -LT, -U, or -UA).3141 THRU 3144SENSITIVEHALL-EFFECT SWITCHESFOR HIGH-TEMP. OPERATION115 Northeast Cutoff, Box 15036Worcester, Massachusetts 01615-0036 (508) 853-5000TYPICAL OPERATING CHARACTERISTICS (cont.)CHANGE IN OPERATE POINT10152025SUPPLY VOLTAGE IN VOLTSDwg. GH-042-15C H A N G E I N O P E R A T E P O I N T I N G A U S S-5.05.0OPERATIONThe output of these devices (pin 3) switches low when the magnetic field at the Hall sensor exceeds the operate point threshold (B OP ). At this point, the output voltage is V OUT(SAT). When the magnetic field is reduced to below the release point threshold (B RP ), the device output goes high. The difference in the magnetic operate and release points is called the hysteresis (B hys ) of the device. This built-in hysteresis allows clean switching of the output even in the presence of external mechanical vibration and electrical noise.3141 THRU 3144SENSITIVE HALL-EFFECT SWITCHES FOR HIGH-TEMP. OPERATION PACKAGE DESIGNATOR ‘LT’(SOT-89/TO-243AA)Dimensions in Inches(for reference only)Dimensions in Millimeters(controlling dimensions)0.440.35NOTES:1.Tolerances on package height and width represent allowable mold offsets. Dimensions given are measured at the widest point (parting line).2.Exact body and lead configuration at vendor’s option within limits shown.3.Height does not include mold gate flash.3141 THRU 3144SENSITIVEHALL-EFFECT SWITCHESFOR HIGH-TEMP. OPERATION115 Northeast Cutoff, Box 15036Worcester, Massachusetts 01615-0036 (508) 853-5000°°NOTES:1.Tolerances on package height and width represent allowable mold offsets. Dimensions given are measuredat the widest point (parting line).2.Exact body and lead configuration at vendor’s option within limits shown.3.Height does not include mold gate flash.4.Recommended minimum PWB hole diameter to clear transition area is 0.035" (0.89 mm).PACKAGE DESIGNATOR ‘U’Dimensions in Inches Dimensions in Millimeters (controlling dimensions)(for reference only)Devices in the ‘U’ package areNOT RECOMMENDED FOR NEW DESIGN3141 THRU 3144SENSITIVE HALL-EFFECT SWITCHES FOR HIGH-TEMP. OPERATION Dwg. MH-014E inBSC°NOTES:1.Tolerances on package height and width represent allowable mold offsets. Dimensions given are measured at the widest point (parting line).2.Exact body and lead configuration at vendor’s option within limits shown.3.Height does not include mold gate flash.Dwg. MH-014E mmBSC °PACKAGE DESIGNATOR ‘UA’Dimensions in Inches Dimensions in Millimeters (controlling dimensions)(for reference only)3141 THRU 3144SENSITIVEHALL-EFFECT SWITCHESFOR HIGH-TEMP. OPERATION115 Northeast Cutoff, Box 15036Worcester, Massachusetts 01615-0036 (508) 853-5000Allegro MicroSystems, Inc. reserves the right to make, from time to time,such departures from the detail specifications as may be required to permit improvements in the design of its products.The information included herein is believed to be accurate and reliable.However, Allegro MicroSystems, Inc. assumes no responsibility for its use;nor for any infringements of patents or other rights of third parties which may result from its use.。

常用传感器应用一、温度传感器1、热敏电阻:分类:正温度系数(PTC)、负温度系数(NTC)、临界温度热敏电阻(CTR ) 实验室使用的是电阻值随温度的增加而减小的热敏电阻(负温度系数热敏电阻),常温状态下热敏电阻阻值约为9.3K 。
应该指出,由于热敏电阻的线性不好,现在已基本不再用来作温度测量使用了。
但是由于成本低,在定点温度控制等场合中还有较大的应用市场。
单点测温电路如下:(电路中R2的作用是改善RT 随温度变化的非线性性)2、温控开关:按开关类型分为常开可逆、常闭可逆和常开不可逆、常闭不可逆四种。
还可以按照临界温度分,温控开关的临界温度一般标称在开关体上。
二、声电式传感器1、压电陶瓷片:工作原理:当压电陶瓷片上受到外加压力时,陶瓷片发生机械变形,其极化强度随之变小,使一部分附加在陶瓷片表面的电荷释放出来,而产生放电现象。
当压力取消后,又恢复原状,极化强度增大,电极上又吸附一部分电荷,出现充电现象。
这种由机械能转变为电能的现象,称为“正压电效应”。
反之,当在压电陶瓷片上加一电场,陶瓷片则发生机械变形。
当外加电场方向陶瓷片极化方向相同时,极化强度增大,使陶瓷片沿极化方向伸长。
当外加电场方向与陶瓷片极化方向相反时,陶瓷片沿极化方向缩短。
这种由电能转变为机械能的现象,称为“反压电效应”。
测试电路图如下:(电路连接时注意区分正负极,与背面金属铜连接的为负端,涂银层为正端)R23.6K R610KR310KR510KR71KR410KR9A 5KR1RTVCCR81KD1LEDU1OPQ19013Q29013Q39013R3680R4350K R513K R62.7KR21KR1A500KY1C110u F OUTC247u F +5V2、驻极体话筒:驻极体话筒及其电路的接法有两种:源极输出与漏极输出。
源极输出类似晶体三极管的射极输出。
需用三根引出线。
漏极D 接电源正极。
源极S 与地之间接一电阻Rs 来提供源极电压,信号由源极经电容C 输出。


常用传感器应用一、温度传感器1、热敏电阻:分类:正温度系数 (PTC)、负温度系数 (NTC) 、临界温度热敏电阻(CTR )实验室使用的是电阻值随温度的增加而减小的热敏电阻(负温度系数热敏电阻),常温状态下热敏电阻阻值约为9.3K。
应该指出,由于热敏电阻的线性不好,现在已基本不再用来作温度测量使用了。
但是由于成本低,在定点温度控制等场合中还有较大的应用市场。
单点测温电路如下:(电路中 R2的作用是改善 RT随温度变化的非线性性)VCCR1R2R33.6K10KRTU1R4 10KR6 1 0K R81 KOPR9 A R55 K10KD1LEDR71 K2、温控开关:按开关类型分为常开可逆、常闭可逆和常开不可逆、常闭不可逆四种。
还可以按照临界温度分,温控开关的临界温度一般标称在开关体上。
二、声电式传感器1、压电陶瓷片:工作原理:当压电陶瓷片上受到外加压力时,陶瓷片发生机械变形,其极化强度随之变小,使一部分附加在陶瓷片表面的电荷释放出来,而产生放电现象。
当压力取消后,又恢复原状,极化强度增大,电极上又吸附一部分电荷,出现充电现象。
这种由机械能转变为电能的现象,称为“正压电效应”。
反之,当在压电陶瓷片上加一电场,陶瓷片则发生机械变形。
当外加电场方向陶瓷片极化方向相同时,极化强度增大,使陶瓷片沿极化方向伸长。
当外加电场方向与陶瓷片极化方向相反时,陶瓷片沿极化方向缩短。
这种由电能转变为机械能的现象,称为“反压电效应”。
测试电路图如下: ( 电路连接时注意区分正负极,与背面金属铜连接的为负端,涂银层为正端 )+5VR1 AR3R4R5R66 80350K13K 2.7 K500 KC1C2R2OUT1 K10u F 4 7u FQ1Q2Q3901 39013901 3Y12、驻极体话筒:驻极体话筒及其电路的接法有两种:源极输出与漏极输出。
源极输出类似晶体三极管的射极输出。
需用三根引出线。
漏极 D 接电源正极。

传感器原理及工程应用(论文)霍尔传感器应用测速方面学生姓名:指导教师:专业:学号:2011 年12 月目录前言 (1)1绪论 (1)1.1脉冲信号的获得 (1)1.2方案分析论证 (2)1.3单片机模块论证与选择 (2)1.4显示模块论证与选择 (2)1.5报警模块论证与选择 (3)1.6电源模块论证与选择 (3)2 基于霍尔传感器的电机转速测量系统硬件设计 (4)2.1总体硬件设计 (4)2.2系统电路设计 (5)2.3霍尔传感器测量电路设计 (5)2.4霍尔传感器测量原理 (6)2.5转速测量方法 (7)2.6反相器74LS14 (7)2.7光电耦合器 (8)2.8蜂鸣器 (9)结论 (10)参考文献 (11)前言测速是工农业生产中经常遇到的问题,学会使用单片机技术设计测速仪表具有很重要的意义。
要测速,首先要解决是采样的问题。
在使用模拟技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。
使用单片机进行测速,可以使用简单的脉冲计数法。
只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入单片机中进行计数,即可获得转速的信息。
在直流电机的多年实际运行的过程中,机械测速电机不足之处日益明显,其主要表现为直流测速电机DG中的炭刷磨损及交流测速发电机TG中的轴承磨损,增加了设备的维护工作量,也随着增加了发生故障的可能性;同时机械测速电机在更换炭刷及轴承的检修作业过程中,需要将直流电动机停运,安装过程中需要调整机械测速电机轴与主电机轴的同轴度,延长了检修时间,影响了设备的长期平稳运行。
随着电力电子技术的不断发展,一些新颖器件的不断涌现,原有器件的性能也随着逐渐改进,采用电力电子器件构成的各种电力电子电路的应用范围与日俱增。
因此采用电子脉冲测速取代原直流电动机械测速电机已具备理论基础,如可采用磁阻式、霍尔效应式、光电式等方式检测电机转速。
经过比较分析后,决定采用测速齿轮和霍尔元件代替原来的机械测速电机。


霍尔传感器在汽车上的应用随着现代科技的不断发展,汽车行业也在不断地升级改进,在这种情况下,各种高科技元件也在不断地被应用在汽车制造中。
其中,霍尔传感器就是一种被广泛应用的元件。
霍尔传感器是一种能够检测磁场变化的传感器,在汽车上有着多种应用。
一、引言霍尔传感器是一种基于霍尔效应实现检测、计量的传感器。
霍尔效应是指在某些材料中,在外加磁场的作用下,自由电子受到洛伦兹力的作用而产生横向位移,并在材料的两侧产生电压差的现象。
这种效应被广泛应用在磁场测量和探测中,尤其是在汽车制造中。
二、车速传感器车速传感器是一种应用广泛的霍尔传感器。
通过车速传感器,车辆的速度可以被准确地检测和记录。
车速传感器通常安装在车速表或车速传感器齿轮箱中,当车辆行驶过程中,车速传感器检测到齿轮的旋转速度,并将这个信号传输到车辆电子控制单元(ECU)中。
ECU通过分析这个信号来计算车辆当前的速度,并将结果显示在车速表上。
车速传感器可以测量车辆的加速度和减速度,并帮助驾驶员更好地掌握驾驶情况。
三、转速传感器除了车速传感器之外,霍尔传感器还可以用来检测引擎转速。
在汽车引擎中,转速传感器是一种能够检测发动机转速、控制点火时间和喷油系统的传感器。
转速传感器通常安装在引擎上,它检测到引擎旋转的速度并将这个信号传输到ECU中,以控制引擎的点火和燃油喷射。
转速传感器帮助确保引擎的可靠性和高效性,并提高了汽车的动力性能和能耗效率。
四、油位和温度传感器霍尔传感器还可以用来检测汽车油位和温度。
油位传感器通过检测燃油罐中油液表面的位置来测量燃油的容量,并将这个信号传输到ECU中。
ECU根据油位传感器的信号来计算清晰的油位数据,并用于显示油量表。
温度传感器则可用于检测发动机的温度,帮助确保引擎工作在正常的温度范围内,并提高了汽车的维护效率和可靠性。
五、总结霍尔传感器是一种在汽车制造中广泛应用的传感器。
其基于霍尔效应实现,可以检测磁场变化并输出对应的电信号。

一、温度传感器1、热敏电阻:分类:正温度系数(PTC)、负温度系数(NTC)、临界温度热敏电阻(CTR)实验室使用的是电阻值随温度的增加而减小的热敏电阻(负温度系数热敏电阻),常温状态下热敏电阻阻值约为9.3K。
应该指出,由于热敏电阻的线性不好,现在已基本不再用来作温度测量使用了。
但是由于成本低,在定点温度控制等场合中还有较大的应用市场。
单点测温电路如下:(电路中R2的作用是改善2、温控开关:按开关类型分为常开可逆、常闭可逆和常开不可逆、常闭不可逆四种。
还可以按照临界温度分,温控开关的临界温度一般标称在开关体上。
二、声电式传感器1、压电陶瓷片:工作原理:当压电陶瓷片上受到外加压力时,陶瓷片发生机械变形,其极化强度随之变小,使一部分附加在陶瓷片表面的电荷释放出来,而产生放电现象。
当压力取消后,又恢复原状,极化强度增大,电极上又吸附一部分电荷,出现充电现象。
这种由机械能转变为电能的现象,称为“正压电效应”。
反之,当在压电陶瓷片上加一电场,陶瓷片则发生机械变形。
当外加电场方向陶瓷片极化方向相同时,极化强度增大,使陶瓷片沿极化方向伸长。
当外加电场方向与陶瓷片极化方向相反时,陶瓷片沿极化方向缩短。
这种由电能转变为机械能的现象,称为“反压电效应”。
测试电路图如下:(电路连接时注意区分正负极,与背面金属铜连接的为负端,涂银层为正端)常用传感器应用RT随温度变化的非线性性)驻极体话筒及其电路的接法有两种:源极输出与漏极输出。
源极输出类似晶体三极管的射极输出。
需用三根引出线。
漏极D接电源正极。
源极S 与地之间接一电阻Rs 来提供源极电压,信号由源极经电容C输出。
编织线接地起屏蔽作用。
源极输出的输出阻抗小于2k,电路比较稳定,动态范围大。
但输出信号比漏极输出小。
漏极输出类似晶体三极管的共发射极放入。
只需两根引出线。
oD外形鈿離1S oS内部电路1 ---------DGDG漏极D与电源正极间接一漏极电阻RD信号由漏极D经电容C输出。
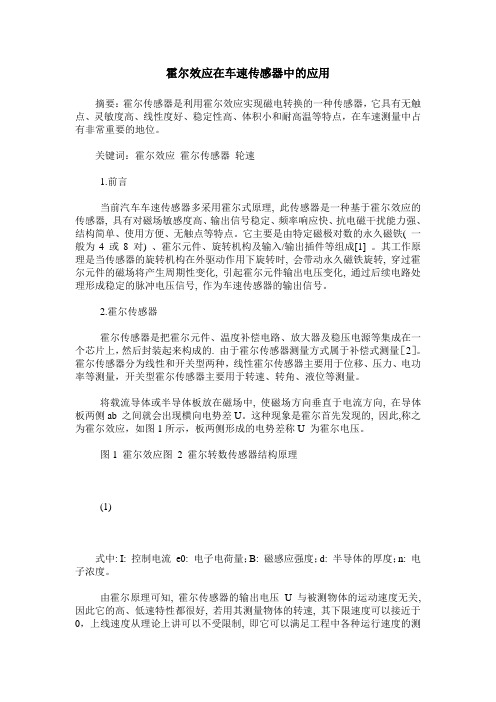
霍尔效应在车速传感器中的应用摘要:霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有无触点、灵敏度高、线性度好、稳定性高、体积小和耐高温等特点,在车速测量中占有非常重要的地位。
关键词:霍尔效应霍尔传感器轮速1.前言当前汽车车速传感器多采用霍尔式原理, 此传感器是一种基于霍尔效应的传感器, 具有对磁场敏感度高、输出信号稳定、频率响应快、抗电磁干扰能力强、结构简单、使用方便、无触点等特点。
它主要是由特定磁极对数的永久磁铁( 一般为4 或8 对) 、霍尔元件、旋转机构及输入/输出插件等组成[1] 。
其工作原理是当传感器的旋转机构在外驱动作用下旋转时, 会带动永久磁铁旋转, 穿过霍尔元件的磁场将产生周期性变化, 引起霍尔元件输出电压变化, 通过后续电路处理形成稳定的脉冲电压信号, 作为车速传感器的输出信号。
2.霍尔传感器霍尔传感器是把霍尔元件、温度补偿电路、放大器及稳压电源等集成在一个芯片上,然后封装起来构成的. 由于霍尔传感器测量方式属于补偿式测量[2]。
霍尔传感器分为线性和开关型两种,线性霍尔传感器主要用于位移、压力、电功率等测量,开关型霍尔传感器主要用于转速、转角、液位等测量。
将载流导体或半导体板放在磁场中, 使磁场方向垂直于电流方向, 在导体板两侧ab 之间就会出现横向电势差U。
这种现象是霍尔首先发现的, 因此,称之为霍尔效应,如图1所示,板两侧形成的电势差称U 为霍尔电压。
图1 霍尔效应图2 霍尔转数传感器结构原理(1)式中: I: 控制电流e0: 电子电荷量;B: 磁感应强度;d: 半导体的厚度;n: 电子浓度。
由霍尔原理可知, 霍尔传感器的输出电压U 与被测物体的运动速度无关, 因此它的高、低速特性都很好, 若用其测量物体的转速, 其下限速度可以接近于0,上线速度从理论上讲可以不受限制, 即它可以满足工程中各种运行速度的测量。
正因为如此, 汽车上的车速传感器大多采用霍尔式传感器。
用霍尔元件作为汽车的车轮转速传感器时, 多采用磁感应强度作输人信号, 且如图2所示结构为多[3]。

传感器测速实验报告院系:班级:小组:组员:日期:2013年4月20日实验二十霍尔转速传感器测速实验一、实验目的了解霍尔转速传感器的应用。
二、基本原理利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平三、需用器件与单元霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。
四、实验步骤1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。
图9-1 霍尔转速传感器安装示意图2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。
3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。
4、将转速调解中的转速电源引到转动源的电源插孔。
5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。
6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理1、记录频率计输出频率数值如下表所示:电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。
六、思考题1、利用霍尔元件测转速,在测量上是否有所限制?答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。
2、本实验装置上用了十二只磁钢,能否只用一只磁钢?答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
实验二十一 磁电式传感器转速测量实验一、 实验目的:了解磁电式测量转速的原理;二、需用器件与单元:磁电传感器、转动调节2-24V ,转动源单元。
在线测试与故障诊断 电 子 测 量 技 术 EL ECTRON IC M EASUREM EN T TECHNOLO GY第32卷第10期2009年10月 霍尔传感器A44E 在车轮测速中的应用研究杨继生1 刘 芬2(1.天津第五机床厂 天津 300222;2.天津工程师范学院电子工程系 天津 300222)摘 要:在汽车行驶及机车控制系统中对测速装置的要求是分辨能力强、高精度、尽可能短的检测时间以及抗干扰能力强等。
该文介绍了一种应用霍尔传感器A44E 获得稳定的脉冲信号,从而实现对车速进行智能测量的方案。
测试结果表明,运用该方案实现的系统能很好的达到对车轮测速的要求。
关键词:霍尔传感器;速度测量;脉冲检测中图分类号:E911 文献标识码:AApplication study of hall sensor A44E in cart wheel πs resurverYang Jisheng 1 Liu Fen 2(1.Tianjin Fift h Machine Tool Works of China ,Tianjin 300222;2.Depart ment of Electronic Engineering ,Tianjin University of Technology Education ,Tianjin 300222)Abstract :Detecting speed equipment is one of great importance in both vehicle travel and engine control system.The requirement of speed 2detecting equipment is high resolution ability ,high precision ,strong ability to resist disturbance and as short detecting time as possible.This paper mainly introduces a implement proposal of using Hall sensor to get steady impulse signal of quadrilateral wave.The test results show that the designed circuits can implement the predefined f unctions.K eyw ords :Hall sensor ;rev survey ;pulse detection0 引 言脉冲计数法[1]是智能测速[2]系统中常用的方法。
只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入微处理器中进行计数,即可获得转速的信息。
可以有多种方式来获得脉冲信号。
将光电传感器安装在转轴上,当扇叶经过时,可产生脉冲信号。
但是光电传感器[3]对灰尘、油污等比较敏感,因此不适宜安装在车轮上。
光电编码器[425]和霍尔传感器都不怕灰尘和油污,且都广泛应用于工业现场。
但是光电编码器价格较昂贵,霍尔传感器[6]价格便宜且具有体积小、灵敏度高、响应速度快、温度性能好、精确度高、可靠性高等特点,能很好地满足车轮测速[7]系统设计的需要。
1 霍尔传感器A44EA44E 芯片属于开关型的霍尔器件,其工作电压范围比较宽(4.5~18V ),其输出的信号符合T TL 电平标准,可以直接接到单片机的I/O 端口上,而且其最高检测频率可达到1M Hz 。
A44E 霍尔开关集成电路应用霍尔效应[8]原理,采用半导体集成技术制造的磁敏电路,它是由电压调整器、霍尔电压发生器、差分放大器、史密特触发器,温度补偿电路和集电极开路的输出级组成的磁敏传感电路,其输入为磁感应强度,输出是一个数字电压信号。
1.1 A44E 的测试特性霍尔开关电路的输出特性见图1所示。
在输入端输入电压V cc ,经稳压器稳压后加在霍耳电势发生器的两端,根据霍耳效应原理,当霍耳片处在磁场中时,在垂直于磁场的方向通以电流,则与这二者相垂直的方向上将会产生霍耳电势差V H 输出,该V H 信号经放大器放大后送至施密特触发器整形,使其成为方波输送到OC 门输出。
当施加的磁场达到工作点(即B OP )时,触发器输出高电压(相对于地电位),使三极管导通,此时OC 门输出端输出低电压,通常称这种状态为开。
当施加的磁场达到释放点(即B RP )时,触发器输出低电压,三极管截止,使OC 门输出高电压,这种状态为关。
在外磁场的作用下,当磁感应强度超过导通阈值B OP时,霍尔电路输出管导通,输出低电平。
之后,B 再增加,仍保持导通态。
若外加磁场的B 值降低到B RP 时,输出管截止,输出高电平。
我们称B OP 为工作点,B RP 为释放点,B OP -B RP =B H 称为回差。
回差的存在使开关电路的抗干扰能力增强。
这样两次电压变换,使霍耳开关完成了一次开关动作。
一般规定,当外加磁场的南极(S 极)接近霍尔・001・ 杨继生等:霍尔传感器A44E 在车轮测速中的应用研究第10期图1 霍尔传感器A44E 的输出特性电路外壳上打有标志的一面时,作用到霍尔电路上的磁场方向为正,北极接近标志面时为负。
1.2 A44E 芯片的引脚及功能霍尔传感器A44E 芯片的引脚接线图见图2所示。
典型应用于无触点开关、汽车点火器、刹车电路、位置转速检测与控制、安全报警装置和纺织控制系统。
霍尔传感器是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC )门输出,工作电压范围宽,使用非常方便。
图2 A44E 芯片引脚接线图引脚1是电源V cc ,引脚2是地GND ,引脚3是输出OU T 。
霍尔器件的工作电压不得超过规定的V cc ,大部分霍尔开关均为OC 输出。
因此,输出应接负载电阻,其数值值取决于负载电流的大小,不得超负载使用。
1.3 A44E 的磁输入检测A44E 的磁输入为单极磁场,即施加磁场的方式是改变磁铁和A44E 之间的距离。
判定磁铁极性方法是:把磁铁的两个极分别靠近A44E 的正面,当其OU T 引脚电平由高变低时即为正确的安装位置,如图3所示。
图3 A44E 判别磁铁极性经过实验得知,A44E 只对磁铁的S 级有响应而对N级没有丝毫响应。
安装时一定要让磁铁的S 级对准A44E 的反应传感区。
1.4 A44E 的导通距离测量把一块小永久磁铁固定在车轮的辐条上,A44E 在车轮辐条附近,如图4所示。
经过实验得知,当磁铁和霍尔开关A44E 移近到一定距离(设此距离为r )时,A44E 芯片的OU T 引脚有脉冲信号输出。
当二者的距离大于r 时,OU T引脚没有脉冲信号输出。
反复实验得出霍尔开关A44E 导通的距离r 为4mm 或5mm 。
图4 A44E 导通距离测量2 A44E 在车轮测速系统中的应用2.1 硬件电路设计霍尔传感器A44E 在测速系统中的主要作用是车轮转速采集。
车轮每转一周,磁铁经过A44E 一次。
A44E 的第3脚就输出一个脉冲信号作为单片机A T89S52的外中断信号,从P3.2口输入。
单片机测量脉冲信号的个数和脉冲周期。
根据脉冲信号的个数计算出里程,根据脉冲信号的周期计算出速度并显示。
A44E 与单片机的硬件电路连接如图5所示。
图5 A44E 与单片机硬件电路连接2.2 软件设计测速流程图如图6所示。
图6 软件流程图・101・ 第32卷电 子 测 量 技 术速度显示部分程序如下:…DISPL A YV :CL R P1.0;关闭L ED1(里程)灯SETB P1.1;点亮L ED2(显示时速状态)CL R P3.7;关小数点显示L CALL VVV ;每圈时间换算为公里/小时程序MOV A ,71H ;将十位数(BCD 码)值移入A SUBB A ,#03H ;与预定报警值比较J NC WARIN G ;时速超时报警SETB P3.1;关报警灯V1:L CALL DISPL A Y ;显亮一次RET ;子程序返回WARIN G:CL R P3.1;报警灯点亮L CALL DL WRON G AJ MP V1;转V1退出3 车轮速度的测试与校准设理论速度为V ,实测速度为V ′,速度的校准参数为k ,则三者应满足如下关系:k =V V ′在模拟测速时,选用的小车轮周长为6cm 。
通过软件编程可实现对4种周长车轮的测试,分别为:6cm 、12cm 、24cm 和48cm 。
表1给出了具体的速度测试结果和校准数据,其中 k 为平均值。
表1 速度测试与校准数据周长C (cm ) T =60sV (m/s )V ′(m/s )k k0.186 3.075220.13977126.915460.152416.155940.171864848.511840.264 结 论经过硬件安装与软件调试,测试结果表明:设计的系统实现了对车轮速度的准确测量。
该系统采用霍尔传感器作为脉冲发生器,具有成本低、性能好、构造简单、在机车处于恶劣的环境系统中具有很强的抗干扰能力。
另外它除了可实现速度里程表功能外,还能存储行驶过程重要数据,为矿机车定期保养检修、运输管理提供可靠数据,并可作为分析事故原因提供依据。
参考文献[1] 路国庆,赵晓博,胡立强,等.脉冲检测方法的霍尔传感器在里程表中的应用[J ].机械设计与制造,2009(1):87289.[2] 赵升吨,王骥,尚春阳,等.一种转速测试的新方法[J ].仪器仪表学报,2001,22(z2):1732174.[3] 乔勇惠.光电传感器原理及应用[J ].可编程控制器与工厂自动化,2008(5):1032106.[4] 邓方,陈杰,陈文颉,等.一种高精度的光电编码器检测方法及其装置[J ].北京理工大学学报,2007,27(11):9772980.[5] 崔焱.基于光电编码器轴的转速测量系统设计实例[J ].机械管理开发,2007(5):74275.[6] 邵显涛,陈明,李俊.基于霍尔传感器电机转速的单片机测量[J ].电子测试,2000(12):46248.[7] 鲜海滢,李晓峰,李在铭.基于摄像机的车辆测速仪[J ].电子测量与仪器学报,2008,22(3):94299.[8] 田汉波,赵英俊.一种基于线性霍尔传感器的直流电机转速测量方法[J ].机械与电子,2007(1):31233.作者简介杨继生,男,1975年8月出生,学士,天津第五机床厂工程师,主要从事电子技术研究及产品研发。
E 2mail :yjs750818@ 刘芬,女,1979年6月生,硕士,天津工程师范学院,讲师,主要从事数字信号处理、微波电路等方面的研究。