变增益变积分
- 格式:doc
- 大小:1.26 MB
- 文档页数:9

第51卷第18期电力系统保护与控制Vol.51 No.18 2023年9月16日Power System Protection and Control Sept. 16, 2023 DOI: 10.19783/ki.pspc.221740直流微网变增益专家自抗扰控制周雪松1,王馨悦1,马幼捷1,徐晓宁1,丰美丽2,问虎龙3(1.天津理工大学,天津 300384;2.天津安捷物联科技股份有限公司,天津 300392;3.天津瑞能电气有限公司,天津 300381)摘要:直流微网在分布式发电的有效利用中发挥重大作用。
为解决直流微网中存在的实时扰动影响双向DC-DC 变换器控制效果从而恶化电能质量的问题,提出了一种变增益专家自抗扰稳压控制。
首先,在状态观测器理论下设计专家系统,将其与扩张状态观测器有机结合,并且引入动态调节因子实现观测器增益的在线优化。
其次,利用系统在抗扰过程中的观测绝对误差与控制强度需求制定专家规则与变增益自抗扰控制策略,给出动态调节因子取值范围。
并且在观测跟踪性能、抗扰频域特性、噪声抑制、时变增益对系统抗扰性的影响等方面进行了理论分析,表明所提出的控制策略能够有效提升系统性能。
最后,经过仿真和实验验证,使用变增益专家自抗扰控制在多种工况下的性能均优于传统双闭环PI与LADRC控制。
关键词:双向DC-DC变换器;自抗扰控制;观测器增益;专家系统;抗扰性Expert system-changeable gain ADRC for a DC microgridZHOU Xuesong1, WANG Xinyue1, MA Youjie1, XU Xiaoning1, FENG Meili2, WEN Hulong3(1. Tianjin University of Technology, Tianjin 300384, China; 2. Tianjin Anjie IOT Technology Co., Ltd.,Tianjin 300392, China; 3. Tianjin Ruineng Electric Co., Ltd., Tianjin 300381, China)Abstract: The DC microgrid plays an important role in the effective utilization of distributed generation. To solve the problem that the real-time disturbance in a DC microgrid affects the control of the bidirectional DC-DC converter and worsens power quality, an expert system-changeable gain active disturbance rejection voltage stabilization control is proposed. First, the expert system is designed using state observer theory, and is organical combined with the ESO. A dynamic adjustment factor is introduced to realize the online optimization of the observer gain. Second, expert rules and changeable gain active disturbance rejection control strategies are formulated based on the observation absolute observation error and control strength demand of the system in the process of anti-interference, and the value range of the dynamic adjustment factor is given. In addition, the effects of observation tracking performance, disturbance rejection frequency domain characteristics, noise suppression and time varying gain on system immunily are analyzed theoretically.The analysis shows that the proposed control strategy can effectively improve the performance of the system. Finally, the simulation and physical experiment results show that the performance of ES-CGADRC is better than that of traditional double closed-loop PI and LADRC control in a variety of conditions.This work is supported by the General Program of National Natural Science Foundation of China (No. 51877152).Key words:bidirectional DC-DC converter; active disturbance rejection control; observer gain; expert system; immunity0 引言近年来,随着能源革命的推进[1],大量分布式电源[2]如太阳能、风力发电、燃料电池等广泛应用微网形式与大电网并网连接[3]。

运放增益积分电路运放增益积分电路是一种常见的电路配置,常用于模拟信号处理和控制系统中。
它由运算放大器(运放)和电容器组成,通过运放的放大功能和电容器的积分作用,实现对输入信号的放大和积分运算,从而得到输出信号。
一、运放的基本原理运放是一种高增益、差分放大器,具有输入阻抗高、输出阻抗低、放大倍数稳定等特点。
它的基本原理是根据输入信号的差值放大,并输出一个放大后的电压。
运放由多个晶体管和电阻构成,其中的差模输入端通过差动放大器放大差模信号,而共模输入端只放大共模信号的一部分。
运放的放大倍数由外部反馈电路决定。
二、增益积分电路的基本结构增益积分电路由运放和电容器组成。
运放的正输入端与电流输入端相连,负输入端与电容器的一端相连,而运放的输出端则与电容器的另一端相连。
输入信号经过运放的放大后,通过电容器的积分作用,得到输出信号。
三、增益积分电路的工作原理增益积分电路的工作原理可以分为两个阶段:放大阶段和积分阶段。
在放大阶段中,输入信号经过运放的放大作用,得到放大后的信号。
运放的放大倍数由反馈电阻和输入电阻决定,可以根据实际需求进行调节。
放大后的信号经过负输入端与电容器连接,进入积分阶段。
在积分阶段中,电容器开始对输入信号进行积分运算。
电容器的积分作用可以使输入信号的变化率变得更加平缓,从而实现对信号的积分运算。
输出信号的幅值与输入信号的频率和电容器的容值有关,可以通过调整电容器的容值来控制输出信号的幅值。
四、增益积分电路的应用增益积分电路在模拟信号处理和控制系统中有着广泛的应用。
其主要应用领域包括但不限于下列几个方面:1. 信号放大:增益积分电路可以将微弱的信号放大到更大的幅值,以便后续处理或控制。
2. 信号积分:增益积分电路可以对输入信号进行积分运算,得到输出信号的积分值。
这在某些控制系统中非常重要,比如位置控制系统中的速度积分环节。
3. 滤波:增益积分电路可以通过调整电容器的容值和运放的放大倍数,实现对输入信号的滤波作用。
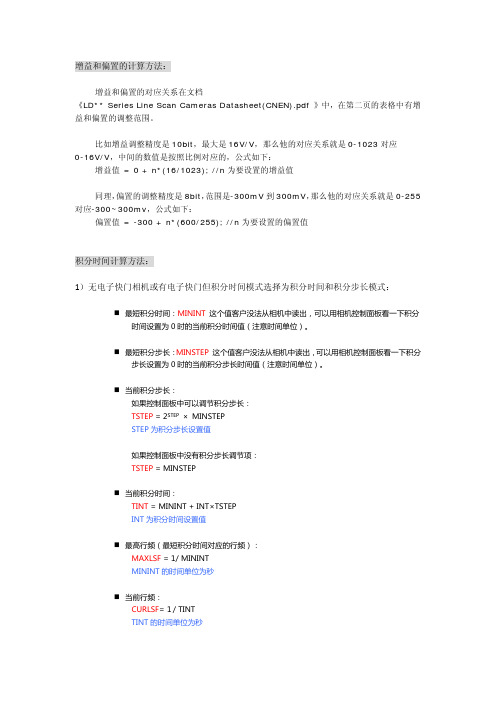
增益和偏置的计算方法:增益和偏置的对应关系在文档《LD** Series Line Scan Cameras Datasheet(CNEN).pdf 》中,在第二页的表格中有增益和偏置的调整范围。
比如增益调整精度是10bit,最大是16V/V,那么他的对应关系就是0-1023对应0-16V/V,中间的数值是按照比例对应的,公式如下:增益值= 0 + n*(16/1023); //n为要设置的增益值同理,偏置的调整精度是8bit,范围是-300mV到300mV,那么他的对应关系就是0-255对应-300~300mv,公式如下:偏置值= -300 + n*(600/255); //n为要设置的偏置值积分时间计算方法:1)无电子快门相机或有电子快门但积分时间模式选择为积分时间和积分步长模式:⏹最短积分时间:MININT这个值客户没法从相机中读出,可以用相机控制面板看一下积分时间设置为0时的当前积分时间值(注意时间单位)。
⏹最短积分步长:MINSTEP这个值客户没法从相机中读出,可以用相机控制面板看一下积分步长设置为0时的当前积分步长时间值(注意时间单位)。
⏹当前积分步长:如果控制面板中可以调节积分步长:TSTEP = 2STEP× MINSTEPSTEP为积分步长设置值如果控制面板中没有积分步长调节项:TSTEP = MINSTEP⏹当前积分时间:TINT = MININT + INT×TSTEPINT为积分时间设置值⏹最高行频(最短积分时间对应的行频):MAXLSF = 1/ MININTMININT的时间单位为秒⏹当前行频:CURLSF= 1/ TINTTINT的时间单位为秒2)支持电子快门相机:2.1)当相机仅支持电子快门(无积分时间支持)时:⏹最短积分时间:MININT这个值客户没法从相机中读出,可以用相机控制面板看一下积分时间设置为0且电子快门为0时的当前积分时间值(注意时间单位)。


积分增益和积分时间的关系当我们谈论积分增益和积分时间的关系时,我们不可避免地涉及到探讨积分的概念和其在数学中的应用。
积分是微积分的一个重要分支,它通过将曲线下面的面积划分为无限小的矩形,来求得曲线的总体积或总面积。
在实际应用中,积分在求解速度、质量、功率等方面发挥着重要的作用。
积分增益指的是在积分过程中,随着积分时间的增加,积分值的增加量。
换句话说,积分增益是积分的导数,它描述了积分值随时间变化的速率。
积分增益越大,表示积分值的增加越快,积分曲线的斜率越陡。
积分时间则是指积分的时间长度,它决定了积分增益的大小。
当积分时间较短时,积分增益较小,因为积分过程还没有充分发挥作用。
随着积分时间的增加,积分增益逐渐增大,因为积分过程得到了更多的时间去积累。
在实际应用中,积分增益和积分时间的关系对于控制系统设计和优化至关重要。
例如,在控制系统中,我们希望通过调整积分时间以及积分增益来实现系统的稳定性和响应速度的平衡。
如果积分时间过短,积分增益较大,系统可能会出现震荡和不稳定的现象。
相反,如果积分时间过长,积分增益较小,系统的响应速度可能会变得较慢。
因此,为了实现系统的最佳性能,我们需要在积分时间和积分增益之间找到一个合适的平衡点。
这就需要根据具体的应用场景和系统需求进行调整和优化。
通过合理地选择积分时间和积分增益,我们可以使系统在快速响应的同时保持稳定,并有效地抑制系统的震荡和振荡现象。
积分增益和积分时间之间存在着密切的关系。
在数学和控制系统中,我们必须合理地选择积分时间和积分增益,以实现系统的最佳性能。
只有在平衡速度和稳定性的前提下,我们才能更好地应用积分,并从中获得更大的收益。

成绩:____大连工业大学《自动控制原理》实验报告实验1 典型环节的阶跃响应专业名称:自动化班级学号:自动化10I-JK学生姓名:ABCD指导老师:EFGH实验日期:年月日一、实验目的1、熟悉各种典型环节的阶跃响应曲线;2、了解参数变化对典型环节动态特性的影响。
二、实验原理实验任务1、比例环节(K)从图0-2的图形库浏览器中拖曳Step(阶跃输入)、Gain(增益模块)、Scope(示波器)模块到图0-3仿真操作画面,连接成仿真框图。
改变增益模块的参数,从而改变比例环节的放大倍数K,观察它们的单位阶跃响应曲线变化情况。
可以同时显示三条响应曲线,仿真框图如图1-1所示。
2、积分环节(1Ts)将图1-1仿真框图中的Gain(增益模块)换成Transfer Fcn (传递函数)模块,设置Transfer Fcn(传递函数)模块的参数,使其传递函数变成1Ts型。
改变Transfer Fcn(传递函数)模块的参数,从而改变积分环节的T,观察它们的单位阶跃响应曲线变化情况。
仿真框图如图1-2所示。
3、一阶惯性环节(11 Ts+)将图1-2中Transfer Fcn(传递函数)模块的参数重新设置,使其传递函数变成11Ts+型,改变惯性环节的时间常数T,观察它们的单位阶跃响应曲线变化情况。
仿真框图如图1-3所示。
4、实际微分环节(1KsTs +) 将图1-2中Transfer Fcn (传递函数)模块的参数重新设置,使其传递函数变成1KsTs +型,(参数设置时应注意1T )。
令K 不变,改变Transfer Fcn (传递函数)模块的参数,从而改变T ,观察它们的单位阶跃响应曲线变化情况。
仿真框图如图1-4所示。
5、二阶振荡环节(2222nn ns s ωξωω++) 将图1-2中Transfer Fcn (传递函数)模块的参数重新设置,使其传递函数变成2222nn ns s ωξωω++型(参数设置时应注意01ξ<<),仿真框图如图1-5所示。
积分增益和积分时间的关系在数学领域中,积分是一种重要的运算方法,它可以帮助我们解决各种问题。
而积分增益和积分时间则是在控制理论中经常涉及的概念。
它们之间的关系可以帮助我们理解系统的稳定性和响应速度。
积分增益是指系统对积分时间的响应程度。
当我们对一个系统施加一个输入信号时,系统的输出信号会随着时间的推移而变化。
而积分增益则是描述系统输出信号的变化速度,它可以告诉我们系统对输入信号的积分响应程度。
积分时间则是指系统对输入信号进行积分的时间长度。
在控制系统中,我们常常需要对输入信号进行积分运算,以得到输出信号。
而积分时间则是描述这个积分过程所需要的时间长度。
积分增益和积分时间之间存在着一定的关系。
一般来说,积分增益越大,系统对输入信号的积分响应越强烈。
也就是说,系统会更快地对输入信号进行积分运算,从而快速得到输出信号。
而积分时间则是影响积分增益的一个重要因素。
当积分时间较短时,系统对输入信号的积分响应会更快,积分增益也会更大。
相反,当积分时间较长时,系统对输入信号的积分响应会更慢,积分增益也会较小。
可以通过一个简单的例子来说明积分增益和积分时间的关系。
假设我们控制一个水箱的水位,我们希望水箱的水位能够稳定在一定的高度上。
我们可以通过控制水箱的进水量来实现这个目标。
如果我们将进水量与水位的偏差进行积分运算,就可以得到一个积分控制器。
当水位偏离目标高度时,积分控制器会增大进水量,从而使得水位回归到目标高度。
在这个例子中,积分增益决定了积分控制器对水位偏差的积分响应程度。
如果积分增益较大,积分控制器会更快地对水位偏差进行积分运算,进而增大进水量,使得水位快速回归到目标高度。
而积分时间则是影响积分增益的一个重要因素。
当积分时间较短时,积分控制器对水位偏差的积分响应会更快,积分增益也会更大。
积分增益和积分时间之间存在着一定的关系。
积分增益决定了系统对输入信号的积分响应程度,而积分时间则是影响积分增益的一个重要因素。
pid增益比例增益积分增益流程1. PID控制器是一种常见的控制系统,用于调节控制系统的输出。
The PID controller is a common control system used to regulate the output of a control system.2. PID控制器由三个部分组成:比例增益、积分增益和微分增益。
The PID controller consists of three parts: proportional gain, integral gain, and derivative gain.3.比例增益决定了PID控制器对偏差的响应速度。
The proportional gain determines the speed of response of the PID controller to an error.4.增加比例增益可以提高系统的响应时间,但可能导致系统产生振荡。
Increasing the proportional gain can improve the system's response time, but may cause the system to oscillate.5.积分增益用于消除系统的静态误差。
The integral gain is used to eliminate the static error of the system.6.增加积分增益可以缩小系统的稳态误差,但也可能导致系统产生超调。
Increasing the integral gain can reduce the steady-state error of the system, but may also cause the system to overshoot.7.微分增益用于减少系统的超调和振荡。
The derivative gain is used to reduce the overshoot and oscillation of the system.8.增加微分增益可以提高系统的阻尼性能,但可能对系统的噪声敏感。
增益微分积分
增益、微分和积分是数学和工程领域中常见的三个重要概念,它们在信号处理、控制系统和电子工程等领域有着广泛的应用。
增益是指一个系统或电路对输入信号的放大程度。
在电子工程中,增益通常用倍数或分贝(dB)来表示。
增益可以是正数,也可以是负数,分别表示信号的放大或衰减。
通过调整增益,可以控制系统的输出信号幅度,以满足特定的需求。
微分是数学中的一种运算,用于求函数在某一点处的导数。
在信号处理中,微分可以用于检测信号的变化率,即信号的斜率。
微分操作可以将信号中快速变化的部分突出显示,从而有助于对信号进行分析和处理。
例如,在控制系统中,微分控制器可以用于快速响应输入信号的变化。
积分是数学中的另一种运算,用于求函数在某个区间上的积分值。
在信号处理中,积分可以用于平滑信号,即去除信号中的噪声和快速变化的部分。
积分操作可以将信号中缓慢变化的部分突出显示,从而有助于对信号进行分析和处理。
例如,在控制系统中,积分控制器可以用于消除稳态误差。
总之,增益、微分和积分是三个重要的概念,它们在数学和工程领域中有着广泛的应用。
增益用于控制信号的幅度,微分用于检测信号的变化率,积分用于平滑信号。
了解和掌握这些概念对于理解和设计各种系统和电路非常重要。
电容大小对积分电路的影响
电容是电路中常见的元件之一,它在积分电路中起着重要的作用。
那么,电容的大小对于积分电路有哪些影响呢?
电容的大小与积分电路的时间常数有关。
电容越大,积分电路的时间常数也就越大。
时间常数代表了积分电路的响应速度,即输入信号经过积分电路后的变化速率。
当电容很小时,积分电路的时间常数较小,输入信号经过积分电路后的变化速率较快;当电容较大时,积分电路的时间常数较大,输入信号经过积分电路后的变化速率较慢。
电容的大小还与积分电路的频率响应有关。
电容越大,积分电路的低频增益越高。
低频增益表示输入信号的低频部分经过积分电路后的放大倍数。
当电容很小时,积分电路的低频增益较低;当电容较大时,积分电路的低频增益较高。
因此,通过改变电容的大小,可以调节积分电路的频率响应。
电容的大小还影响积分电路的幅频特性。
电容越大,积分电路的截止频率越低。
截止频率是指输入信号经过积分电路后,输出信号的幅度开始下降的频率。
当电容很小时,积分电路的截止频率较高;当电容较大时,积分电路的截止频率较低。
电容的大小对积分电路的影响主要体现在时间常数、频率响应和幅频特性上。
不同的电容大小会导致积分电路的响应速度、频率特性
和幅度特性有所不同。
因此,在设计和应用积分电路时,需要根据实际需求选择合适的电容大小,以达到所需的电路性能。
2)变增益、变积分时间常数控制程序
对于图6-41所示的位置同步控制系统,由PLC 实现位置控制器的功能,即根据函数f(∆N)对同步误差∆N 进行运算处理。
函数f(∆N)的功能之一是对误差∆N 进行比例、积分和微分运算即PID 运算,根据实际使用情况,采用PI 控制。
变增益、变积分时间常数控制的梯形图程序如图6-43所示。
条44步89
定时器 高速 定时器号设置值
长传送第一个源字第一个目标字长传送第一个源字第一个目标字长比较比较数据1比较数据2N3大于N4
条45步92
定时器 高速 定时器号设置值N3等于N4
N3小于N4条48步100
图6-43 变增益、变积分时间常数控制梯形图(1)
清除进位长减法
第一个被减数第一个减数字第一个结果字
长传送
第一个源字第一个目标字
无符号块比较源数据
块的第一个字
结果字步111
条50步114
长减法
第一个被减数第一个减数字第一个结果字条51步117条52步119
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条53步121
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条54步126
传送源字目标字传送源字目标字
传送源字目标字传送源字目标字步131
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条56
步136
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条57步141
图6-43 变增益、变积分时间常数控制梯形图(3)
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条59
步151
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条60
步156
传送源字目标字传送源字目标字
传送源字目标字传送源字目标字步146
图6-43 变增益、变积分时间常数控制梯形图(4)
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条62
步166
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条63
步171
传送源字目标字传送源字目标字
传送源字目标字传送源字目标字步161
图6-43 变增益、变积分时间常数控制梯形图(5)
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条65
步181
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条66
步186
传送源字目标字传送源字目标字
传送源字目标字传送源字目标字步176
图6-43 变增益、变积分时间常数控制梯形图(6)
W20.15
传送源字目标字传送源字目标字传送源字目标字传送源字目标字条68步196
P_On
无符号二进制乘被乘数字乘数字结果字条69步201
W20.14
传送源字目标字传送源字目标字
传送源字目标字传送源字目标字步191
无符号二进制除被除数字除数字结果字条70步204
目标字P_On
源字结果字
源字结果字
图6-43 变增益、变积分时间常数控制梯形图(7)
比较数据1比较数据2
条75
步217
不带进位有符号二进制加法加数字加数字结果字
条73步211
不带进位有符号二进制减法被减数字减数字结果字
条74步214
定时器 高速定时器号预置值 定时器 高速定时器号预置值步207条71
步209
条72
2的补码源字结果字
图6-43 变增益、变积分时间常数控制梯形图(8)
在图6-43中,位置误差存放在数据存储器D36之中,比例运算系数K P 即增益是D58和D60中的数据之比,其中D60中的数据来自D38,设定后为常数;D58中的数据是可变的,分为16级,从第1级至第16级,对应于D39~D54,D39至D54中的数据是根据多次试验得到的。
应用无符号块比较指令“BCMP (068) D36 D300 W20”来实现变增益、变积分时间常数控制,D36中的数据是前、后轨道车的位置误差,D300是块的第1个字,D331是块的第32个字,其中有16个下限和16个上限,组成16个范围。
当误差即D36中的数据落在范围1时,条件W20.00变为ON ,执行传送指令“MOV (021) D39 D58 ”、 “MOV (021) D38 D60 ”,即调用增益1,其数值是D39中的数值与D38中的数值之比;同时,执行传送指令 “MOV (021) D69 D90 ”和 “MOV (021) D19 D92 ”,即调用第1级积分时间常数,积分时间由D90和D92中的数值来确定,由高速计算器
TIMH0003和TIMH0004予以实现。
位置误差经比例运算(即误差乘以增益系数)后的结果存放在D62中,积分运算值存放在D95中,D62和D95中的数据代数和即为对误差进行比例积分(PI)运算的结果。
本节着重对前、后轨道车的同步控制程序进行了较为详细的解说,说明变比值控制、变增益控制和变积分时间常数控制的特点和作用。
限于篇幅,有关前、后丝杠同步传动控制的例子请参阅6.4节的有关内容。