数模非线性规
- 格式:doc
- 大小:85.00 KB
- 文档页数:7
数学建模中的非线性优化技术研究一、前言数学建模是研究某个实际问题,运用数学方法对其进行建模、分析和解决的过程。
而非线性优化技术则是数学建模中一个重要的分支,用于解决实际问题中的非线性规划问题。
本文将重点探讨数学建模中的非线性优化技术研究。
二、数学建模中的非线性优化问题在实际问题中,往往存在许多非线性的因素,这些因素使得问题难以用线性规划的方法求解。
因此,非线性优化技术成为了数学建模中一个重要的研究方向。
1. 非线性优化问题的定义非线性优化问题是指在某一约束条件下寻求使目标函数达到最大或最小值的问题,其中目标函数和约束条件均为非线性的。
2. 非线性优化问题的分类根据问题的特点和解法的不同,非线性优化问题可以分为以下几种:(1)连续非线性规划问题:目标函数和约束条件均为连续可微函数的优化问题。
(2)混合整数非线性规划问题:目标函数和约束条件中含有整数变量和连续变量的优化问题。
(3)大规模非线性规划问题:变量数目或约束条件数目超过一定阈值的非线性规划问题。
(4)非凸非线性规划问题:目标函数和约束条件中存在非凸函数的非线性规划问题。
3. 非线性优化问题的求解方法非线性规划问题常用的求解方法有以下几种:(1)基于梯度的方法:如最速下降法、共轭梯度法、牛顿法等。
这种方法需要目标函数和约束条件是光滑的函数,但是由于其迭代效率较低,难以处理大规模问题。
(2)基于牛顿法的方法:如拟牛顿法、积极集法等。
这类方法具有快速收敛的优点,但是在解决非光滑问题时可能会出现振荡现象。
(3)基于全局优化的方法:如遗传算法、模拟退火算法等。
这种方法在解决非凸问题和多峰问题时具有优势,但是其求解时间较长,不适用于实时性要求较高的问题。
三、非线性规划问题的实际应用在实际问题中,非线性规划问题处处存在。
例如,在工程设计中,设计人员需要寻找能够在满足一定约束条件下最小化某一设计指标的设计方案;在经济决策中,决策者需要通过对市场需求和供应分析,确定最优的价格和生产量;在化学反应中,需要找到使得反应速率最大或最小的反应条件等。
数模常⽤算法系列--整数线性规划(分枝定界法)、整数⾮线性规划(蒙特卡洛法)整数线性规划求解----分枝定界法什么是整数规划?线性规划中的变量(部分或全部)限制为整数时,称为整数规划。
若在线性规划模型中,变量限制为整数,则称为整数线性规划。
⽬前所流⾏的求解整数规划的⽅法,往往只适⽤于整数线性规划。
⽬前还没有⼀种⽅法能有效地求解⼀切整数规划。
整数规划的分类- 变量全限制为整数时,称(完全)整数规划- 变量部分限制为整数时,称混合整数规划什么是分枝定界法原理如下:设有最⼤化的整数规划问题A,与它相应的线性规划为问题B,从解问题B开始,若其最优解不符合A的整数条件,那么B的最优⽬标函数必是A的最优⽬标函数z^*的上界\overline{z};⽽A的任意可⾏解的⽬标函数值将是z^*的⼀个下界\underline z ,分枝定界法就是将B的可⾏域分成⼦区域的⽅法。
逐步减⼩\overline z和增⼤\underline z最终求到z^*本质就是个分治回溯,逼近最⼤值的算法。
Matlab算法如下:(强烈警告,(不会验证)由于⽐较懒,并未对算法正确性验证,思路上验证了⼀下没问题就码上来了,如果有错,请⼀定联系~~)% c,A,Aeq,Beq,LB,UB,是linprog函数的相关参数,知道了它们就可以求出对应的线性规划最优解,% now是⽬前已经知道的整数解的最⼤值function y = control(c,A,Aeq,Beq,LB,UB,now)ret = 0;[x,fval] = linprog(c,A,Aeq,Beq,LB,UB); % x是最优解的解向量,fval是对应的函数值if fval < nowy = fval;return;end % 如果得到的当前最优解fval⼩于已知的now,那说明最优整数解不在这个区间,则剪枝返回。
for i = 1 : length(x)if rem(x(i),1) ~= 0 % rem(x,1)如果返回值不为0,则表⽰是⼩数。

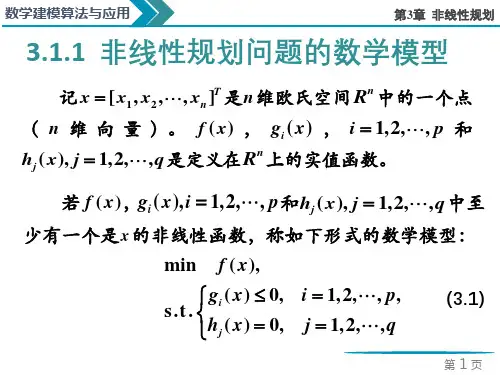
-32-第三章 非线性规划§1 非线性规划1.1 非线性规划的实例与定义如果目标函数或约束条件中包含非线性函数,就称这种规划问题为非线性规划问题。
一般说来,解非线性规划要比解线性规划问题困难得多。
而且,也不象线性规划有单纯形法这一通用方法,非线性规划目前还没有适于各种问题的一般算法,各个方法都有自己特定的适用范围。
下面通过实例归纳出非线性规划数学模型的一般形式,介绍有关非线性规划的基本概念。
例1 (投资决策问题)某企业有n 个项目可供选择投资,并且至少要对其中一个项目投资。
已知该企业拥有总资金A 元,投资于第),,1(n i i L =个项目需花资金i a 元,并预计可收益i b 元。
试选择最佳投资方案。
解 设投资决策变量为 ⎩⎨⎧=个项目决定不投资第,个项目决定投资第i i x i 0,1,n i ,,1L =,则投资总额为∑=ni ii xa 1,投资总收益为∑=ni ii xb 1。
因为该公司至少要对一个项目投资,并且总的投资金额不能超过总资金A ,故有限制条件 ∑=≤<ni ii A xa 1另外,由于),,1(n i x i L =只取值0或1,所以还有 .,,1,0)1(n i x x i i L ==−最佳投资方案应是投资额最小而总收益最大的方案,所以这个最佳投资决策问题归结为总资金以及决策变量(取0或1)的限制条件下,极大化总收益和总投资之比。
因此,其数学模型为:∑∑===ni ii ni ii xa xb Q 11maxs.t. ∑=≤<ni ii A xa 1.,,1,0)1(n i x x i i L ==−上面例题是在一组等式或不等式的约束下,求一个函数的最大值(或最小值)问题,其中至少有一个非线性函数,这类问题称之为非线性规划问题。
可概括为一般形式)(min x fq j x h j ,,1,0)(s.t.L =≤ (NP) p i x g i ,,1,0)(L ==-33-其中T n x x x ][1L =称为模型(NP)的决策变量,f 称为目标函数,i g ),,1(p i L =和),,1(q j h j L =称为约束函数。
数学建模中的非线性规划问题在数学建模领域中,非线性规划问题是一类重要且常见的问题,它在实际应用中具有广泛的意义和价值。
非线性规划问题的研究和解决,对于优化问题的求解和实际应用具有重要的指导作用。
非线性规划问题可以简单地理解为在约束条件下寻找一个或多个使目标函数最优化的变量取值。
与线性规划问题不同,非线性规划问题在目标函数和约束条件中可能存在非线性项,因此其求解难度较大。
不同于线性规划问题的凸性、单调性等属性,非线性规划问题涉及到更多的数学工具和分析方法。
在实际应用中,非线性规划问题的出现非常普遍。
例如,在生产中,企业需要在有限的资源条件下使利润最大化,这就需要解决一个非线性规划问题。
除此之外,非线性规划问题还广泛应用于交通、能源、金融等领域。
不仅如此,非线性规划问题还可以用于统计数据拟合、函数逼近等问题的求解。
因此,研究和解决非线性规划问题具有非常重要的实际意义。
在解决非线性规划问题时,常用的方法主要包括精确解法和近似解法。
精确解法主要包括拉格朗日乘子法、KKT条件等,通过求解一系列方程和方程组来确定最优解。
这类方法通常适用于问题结构相对简单、目标函数和约束条件有良好性质的情况。
然而,对于问题结构复杂、目标函数和约束条件非常复杂的情况,精确解法往往效率较低,难以求解。
因此,在实际应用中,近似解法更为常见。
近似解法主要包括梯度下降法、牛顿法、拟牛顿法、遗传算法等。
这些方法通常基于局部优化思想,通过不断迭代和优化,逐步靠近最优解。
这类方法适用于一般性的非线性规划问题,具有较强的鲁棒性和适应性。
但是,这些方法也有其局限性,如收敛速度慢、易陷入局部最优等。
除了上述方法外,还有一些新的研究方法和算法被提出,如混合整数非线性规划、次梯度法、粒子群优化等。
这些方法在某些特定问题中表现出较好的运用效果,并有望在未来的研究中得到更广泛的应用。
总之,非线性规划问题在数学建模中占据重要地位,对于优化问题的求解和实际应用具有重要的指导作用。
数学教案数学建模中的非线性规划问题一、引言在实际生活和工程领域中,我们经常会遇到各种非线性规划问题。
非线性规划是一种优化问题,它的目标函数和约束条件都是非线性的。
解决非线性规划问题可以帮助我们更好地理解和应用数学知识,同时也可以提高我们的实际问题解决能力。
本教案旨在介绍数学建模中的非线性规划问题,并探究如何求解这类问题。
二、背景知识1. 非线性规划的基本概念非线性规划是在目标函数和约束条件中存在非线性项的优化问题。
目标函数和约束条件可以是非线性的多项式、指数函数、对数函数等形式。
2. 非线性规划的求解方法目前,常用的非线性规划求解方法有梯度法、牛顿法、拟牛顿法等。
这些方法都是基于局部优化的思想,通过迭代逼近全局最优解。
三、教学内容1. 非线性规划问题的数学建模非线性规划问题通常可以通过建立数学模型来描述。
在建模过程中,需要确定目标函数和约束条件,并根据实际问题选择适当的变量和参数。
2. 求解非线性规划问题的基本步骤求解非线性规划问题通常需要经过以下步骤:a. 确定问题的数学模型;b. 将目标函数和约束条件转化为数学表达式;c. 选择合适的求解方法,并考虑收敛性和计算复杂度等因素;d. 编写相应的计算程序,并进行数值计算;e. 对结果进行分析和解释,给出合理的结论。
3. 实际问题的案例分析通过实际问题的案例分析,引导学生了解非线性规划问题的应用场景,并培养学生解决实际问题的能力。
四、教学设计1. 概念讲解通过讲解非线性规划的基本概念和相关知识,引导学生了解非线性规划问题的特点和求解方法。
2. 理论讲解分析非线性规划问题的常见形式,并介绍求解非线性规划问题的基本步骤和方法。
3. 数学建模实践设计几个实际问题的数学建模例子,引导学生通过建立数学模型并求解,解决实际问题。
4. 计算实验利用数学软件(如MATLAB)进行计算实验,演示非线性规划问题的求解过程,并分析计算结果。
5. 案例分析讨论选取一些典型的非线性规划问题的案例,进行讨论和分析,引导学生理解非线性规划问题的应用价值。
实验六数学建模—非线性规划实验目的:1.直观了解非线性规划的基本内容.2.掌握用数学软件求解优化问题.实验内容:1、某厂向用户提供发动机,合同规定,第一、二、三季度末分别交货40台、60台、80台.每季度的生产费用为()2bxaxxf+=(单位:元), 其中x是该季度生产的台数.若交货后有剩余,可用于下季度交货,但需支付存储费,每台每季度c元.已知工厂每季度最大生产能力为100台,第一季度开始时无存货,设a=50、b=0.2、c=4,问:工厂应如何安排生产计划,才能既满足合同又使总费用最低.讨论a、b、c变化对计划的影响,并作出合理的解释.2、一基金管理人的工作是: 每天将现有的美元、英镑、马克和日元四种货币按当天汇率相互兑换,使在满足需要的条件下,按美元计算的价值最高.设某天的汇率、现有货币和当天需求如下:问该天基金管理人应如何操作. (“按美元计算的价值”指兑入、兑出汇率的平均值,如1英镑相当于()258928.01697.1+=1.696993美元.)实验过程与结果:1、(1)模型建立决策变量:设第1,2,3季度分别生产x1,x2,x3台发动机,第1,2季度末分别有存货40-x1,x1+x2-100台,第3季度末无存货目标函数:设总费用为z=a(x1+x2+x3)+b(x1^2+x2^2+x3^2)+c[(x1-40)+(x1+x2-100)]约束条件:生产的发动机应该在第3季度末全部卖出,则有x1+x2+x3=180;同时要保证第1,2季度能供货且有能力生产,要求x1≥40,x1+x2≥100,100≥x1,100≥x2,100≥x3非负约束:x1,x2,x3≥0综上可得:Maxz=a(x1+x2+x3)+b(x1^2+x2^2+x3^2)+c[(x1-40)+(x1+x2-100)]s.t.x1+x2+x3=180x1+x2≥100x1≥400≤x1,x2,x3≤100(2)模型求解结果为:即工厂应第一季度生产50台发动机,第二季度生产60台发动机,第三季度生产70台发动机,才能既满足合同又使总费用最低。
非线性规划一、概述具有非线性约束条件或目标函数的数学规划,是运筹学的一个重要分支。
非线性规划研究一个n元实函数在一组等式或不等式的约束条件下的极值问题的目标函数和约束条件至少有一个是未知量的非线性函数。
目标函数和约束条件都是线性函数的情形则属于线性规划。
二、非线性规划发展史公元前500年古希腊在讨论建筑美学中就已发现了长方形长与宽的最佳比例为0.618,称为黄金分割比。
其倒数至今在优选法中仍得到广泛应用。
在微积分出现以前,已有许多学者开始研究用数学方法解决最优化问题。
例如阿基米德证明:给定周长,圆所包围的面积为最大。
这就是欧洲古代城堡几乎都建成圆形的原因。
但是最优化方法真正形成为科学方法则在17世纪以后。
17世纪,I.牛顿和G.W.莱布尼茨在他们所创建的微积分中,提出求解具有多个自变量的实值函数的最大值和最小值的方法。
以后又进一步讨论具有未知函数的函数极值,从而形成变分法。
这一时期的最优化方法可以称为古典最优化方法。
最优化方法不同类型的最优化问题可以有不同的最优化方法,即使同一类型的问题也可有多种最优化方法。
反之,某些最优化方法可适用于不同类型的模型。
最优化问题的求解方法一般可以分成解析法、直接法、数值计算法和其他方法。
①解析法:这种方法只适用于目标函数和约束条件有明显的解析表达式的情况。
求解方法是:先求出最优的必要条件,得到一组方程或不等式,再求解这组方程或不等式,一般是用求导数的方法或变分法求出必要条件,通过必要条件将问题简化,因此也称间接法。
②直接法:当目标函数较为复杂或者不能用变量显函数描述时,无法用解析法求必要条件。
此时可采用直接搜索的方法经过若干次迭代搜索到最优点。
这种方法常常根据经验或通过试验得到所需结果。
对于一维搜索(单变量极值问题),主要用消去法或多项式插值法;对于多维搜索问题(多变量极值问题)主要应用爬山法。
③数值计算法:这种方法也是一种直接法。
它以梯度法为基础,所以是一种解析与数值计算相结合的方法。
④其他方法:如网络最优化方法等。
根据函数的解析性质,还可以对各种方法作进一步分类。
例如,如果目标函数和约束条件都是线性的,就形成线性规划。
线性规划有专门的解法,诸如单纯形法、解乘数法、椭球法和卡马卡法等。
当目标或约束中有一非线性函数时,就形成非线性规划。
当目标是二次的,而约束是线性时,则称为二次规划。
二次规划的理论和方法都较成熟。
如果目标函数具有一些函数的平方和的形式,则有专门求解平方和问题的优化方法。
目标函数具有多项式形式时,可形成一类几何规划。
非线性规划是20世纪50年代才开始形成的一门新兴学科。
1951年H.W.库恩和A.W.塔克发表的关于最优性条件(后来称为库恩·塔克条件)的论文是非线性规划正式诞生的一个重要标志。
在50年代还得出了可分离规划和二次规划的n种解法,它们大都是以G.B.丹齐克提出的解线性规划的单纯形法为基础的。
50年代末到60年代末出现了许多解非线性规划问题的有效的算法,70年代又得到进一步的发展。
非线性规划在工程、管理、经济、科研、军事等方面都有广泛的应用,为最优设计提供了有力的工具。
第二次世界大战前后,由于军事上的需要和科学技术和生产的迅速发展,许多实际的最优化问题已经无法用古典方法来解决,这就促进了近代最优化方法的产生。
近代最优化方法的形成和发展过程中最重要的事件有:以苏联康托罗维奇和美国G.B.丹齐克为代表的线性规划;以美国库恩和塔克尔为代表的非线性规划;以美国R.贝尔曼为代表的动态规划;以苏联庞特里亚金为代表的极大值原理等。
这些方法后来都形成体系,成为近代很活跃的学科,对促进运筹学、管理科学、控制论和系统工程等学科的发展起了重要作用。
三、非线性规划求解法(1)一维最优化方法指寻求一元函数在某区间上的最优值点的方法。
这类方法不仅有实用价值,而且大量多维最优化方法都依赖于一系列的一维最优化。
常用的一维最优化方法有黄金分割法、切线法和插值法。
①黄金分割法:又称0.618法。
它适用于单峰函数。
其基本思想是:在初始寻查区间中设计一列点,通过逐次比较其函数值,逐步缩小寻查区间,以得出近似最优值点。
②切线法:又称牛顿法。
它也是针对单峰函数的。
其基本思想是:在一个猜测点附近将目标函数的导函数线性化,用此线性函数的零点作为新的猜测点,逐步迭代去逼近最优点。
③插值法:又称多项式逼近法。
其基本思想是用多项式(通常用二次或三次多项式)去拟合目标函数。
此外,还有斐波那契法、割线法、有理插值法、分批搜索法等。
(2)无约束最优化方法指寻求n元实函数f在整个n维向量空间Rn上的最优值点的方法。
这类方法的意义在于:虽然实用规划问题大多是有约束的,但许多约束最优化方法可将有约束问题转化为若干无约束问题来求解。
无约束最优化方法大多是逐次一维搜索的迭代算法。
这类迭代算法可分为两类。
一类需要用目标函数的导函数,称为解析法。
另一类不涉及导数,只用到函数值,称为直接法。
这些迭代算法的基本思想是:在一个近似点处选定一个有利搜索方向,沿这个方向进行一维寻查,得出新的近似点。
然后对新点施行同样手续,如此反复迭代,直到满足预定的精度要求为止。
根据搜索方向的取法不同,可以有各种算法。
属于解析型的算法有:①梯度法:又称最速下降法。
这是早期的解析法,收敛速度较慢。
②牛顿法:收敛速度快,但不稳定,计算也较困难。
③共轭梯度法:收敛较快,效果较好。
④变尺度法:这是一类效率较高的方法。
其中达维登-弗莱彻-鲍威尔变尺度法,简称DFP法,是最常用的方法。
属于直接型的算法有交替方向法(又称坐标轮换法)、模式搜索法、旋转方向法、鲍威尔共轭方向法和单纯形加速法等。
(3)约束最优化方法指前述一般非线性规划模型的求解方法。
常用的约束最优化方法有四种。
①拉格朗日乘子法:它是将原问题转化为求拉格朗日函数的驻点。
②制约函数法:又称系列无约束最小化方法,简称SUMT法。
它又分两类,一类叫惩罚函数法,或称外点法;另一类叫障碍函数法,或称内点法。
它们都是将原问题转化为一系列无约束问题来求解。
③可行方向法:这是一类通过逐次选取可行下降方向去逼近最优点的迭代算法。
如佐坦迪克法、弗兰克-沃尔夫法、投影梯度法和简约梯度法都属于此类算法。
④近似型算法:这类算法包括序贯线性规划法和序贯二次规划法。
前者将原问题化为一系列线性规划问题求解,后者将原问题化为一系列二次规划问题求解。
四、常见问题对于一个实际问题,在把它归结成非线性规划问题时,一般要注意如下几点:(1)确定供选方案:首先要收集同问题有关的资料和数据,在全面熟悉问题的基础上,确认什么是问题的可供选择的方案,并用一组变量来表示它们。
(2)提出追求目标:经过资料分析,根据实际需要和可能,提出要追求极小化或极大化的目标。
并且,运用各种物理原理,等,把它表示成数学关系式。
(3)给出价值标准:在提出要追求的目标之后,要确立所考虑目标的好或坏的价值标准,并用某种数量形式来描述它。
(4)寻求限制条件:所追求的目标一般都要在一定的条件下取得极小化或极大化结果,因此还需要寻找出问题的所有限制条件,这些条件通常用变量之间的一些不等式或等式来表示。
五、非线性规划数学模型:对实际规划问题作定量分析,必须建立数学模型。
建立数学模型首先要选定适当的目标变量和决策变量,并建立起目标变量与决策变量之间的函数关系,称之为目标函数。
然后将各种限制条件加以抽象,得出决策变量应满足的一些等式或不等式,称之为约束条件。
非线性规划问题的一般数学模型可表述为求未知量x1,x2,…,xn,使满足约束条件:gi(x1,…,xn)≥0i=1,…,mhj(x1,…,xn)=0j=1,…,p并使目标函数f(x1,…,xn)达到最小值(或最大值)。
其中f,诸gi和诸hj都是定义在n维向量空间Rn的某子集D(定义域)上的实值函数,且至少有一个是非线性函数。
上述模型可简记为:min f(x)s.t. gi(x)≥0i=1,…,mhj(x)=0 j=1,…,p其中x=(x1,…,xn)属于定义域D,符号min表示“求最小值”,符号s.t.表示“受约束于”。
定义域D 中满足约束条件的点称为问题的可行解。
全体可行解所成的集合称为问题的可行集。
对于一个可行解x*,如果存在x*的一个邻域,使目标函数在x*处的值f(x*)优于(指不大于或不小于)该邻域中任何其他可行解处的函数值,则称x*为问题的局部最优解(简称局部解)。
如果f(x*)优于一切可行解处的目标函数值,则称x*为问题的整体最优解(简称整体解)。
实用非线性规划问题要求整体解,而现有解法大多只是求出局部解。
六、非线性规划分类(1)凸规划这是一类特殊的非线性规划。
在前述非线性规划数学模型中,若f(x)是凸函数,诸g(x)都是凹函数,诸h(x)都是一次函数,则称之为凸规划。
所谓f(x)是凸函数,是指f(x)有如下性质:它的定义域是凸集,且对于定义域中任意两点x和y及任一小于1的正数α。
所谓凸集,是指具有如下性质的集合:连结集合中任意两点的直线段上的点全部属于该集合。
对于一般的非线性规划问题,局部解不一定是整体解。
但凸规划的局部解必为整体解,而且凸规划的可行集和最优解集都是凸集。
(2)二次规划一类特殊的非线性规划。
它的目标函数是二次函数,约束条件是线性的。
(3)几何规划一类特殊的非线性规划。
它的目标函数和约束函数都是正定多项式(或称正项式)。
几何规划本身一般不是凸规划,但经适当变量替换,即可变为凸规划。
几何规划的局部最优解必为整体最优解。
求解几何规划的方法有两类。
一类是通过对偶规划去求解;另一类是直接求解原规划,这类算法大多建立在根据几何不等式将多项式转化为单项式的思想上。
七、例题说明在约10,000m高空的某边长160km的正方形区域内,经常有若干架飞机作水平飞行。
区域内每架飞机的位置和速度向量均由计算机记录其数据,以便进行飞行管理。
当一架欲进入该区域的飞机到达区域边缘时,记录其数据后,要立即计算并判断是否会与区域内的飞机发生碰撞。
如果会碰撞,则应计算如何调整各架(包括新进入的)飞机飞行的方向角,以避免碰撞。
现假定条件如下:1)不碰撞的标准为任意两架飞机的距离大于8km;2)飞机飞行方向角调整的幅度不应超过30度;3)所有飞机飞行速度均为每小时800km;4)进入该区域的飞机在到达区域边缘时,与区域内飞机的距离应在60km 以上;5)最多需考虑6架飞机;6)不必考虑飞机离开此区域后的状况。
请你对这个避免碰撞的飞行管理问题建立数学模型,列出计算步骤,对以下数据进行计算(方向角误差不超过0.01度),要求飞机飞行方向角调整的幅度尽量小。
设该区域4个顶点的座标为(0,0),(160,0),(160,160),(0,160)。
记录数据为:飞机编号横座标x纵座标y方向角(度)1 150 140 2432 85 85 2363 150 155 220.54 145 50 1595 130 150 230新进入0 0 52注:方向角指飞行方向与x 轴正向的夹角。