开环直流调速系统
- 格式:doc
- 大小:131.50 KB
- 文档页数:13

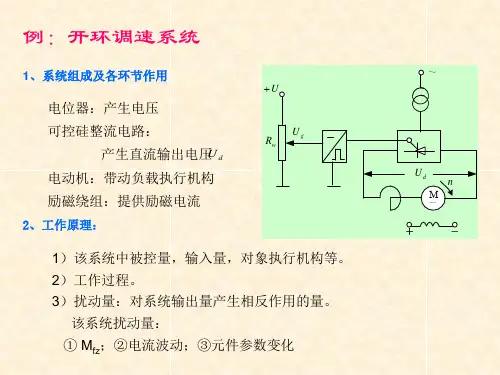
§5-1 晶闸管直流调速系统参数和环节特性的测定一、 实验目的(1) 熟悉晶闸管直流调速系统的组成及其基本结构(2) 掌握晶闸管直流调速系统参数及反馈环节测定方法二、 实验原理晶闸管直流直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、电动机-发电机组等组成。
在本实验中,整流装置的主电路为三相桥式电路,控制电路可直接由给定电压U g 作为触发器的移相控制电压U ct ,改变U g 的大小α即可改变控制角,从而获得可调的直流电压,以满足实验要求。
实验系统的组成原理如图5-1所示。
1V L d三相电源输出A M A V G VT 4VT 1VT 3VT 5VT 6VT 2I 1给定触发电路正桥功放U f G 1K 1G 2K 2G 3K 3G 4K 4G 5K 5G 6K 6励磁电源I 2U 2R U ct图5-1 晶闸管直流调速实验系统原理图三、 实验内容(1)测定晶闸管直流调速系统主电路总电阻值R 。
(2)测定晶闸管直流调速系统主电路电感值L 。
(3)测定直流电机-直流发电机-测速发电机组的飞轮惯量GD 2。
(4)测定晶闸管直流调速系统主电路电磁时间常数Td 。
(5)测定直流电动机电势常数C e 和转矩常数C M 。
(6)测定晶闸管直流调速系统机电时间常数T M 。
(7)测定晶闸管触发及整流装置特性U d =f (U ct )。
(8) 测定测速发电机特性U TG =f (n )。
四、 实验仿真晶闸管直流调速实验系统的原理如图5-1所示。
该系统由给定信号、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机等部分组成。
图5-2是采用面向电气原理图方法构成的晶闸管直流调速系统的仿真模型。
下面介绍各部分建模与参数设置过程。
图5-2 晶闸管开环调速系统的仿真模型1.系统的建模和模型参数设置系统的建模包括主电路的建模和控制电路的建模两部分。
(1)主电路的建模和参数设置由图5-2可见,开环直流调速系统的主电路由三相对称交流电压器、晶闸管整流桥、平波电抗器、直流电动机等部分组成。
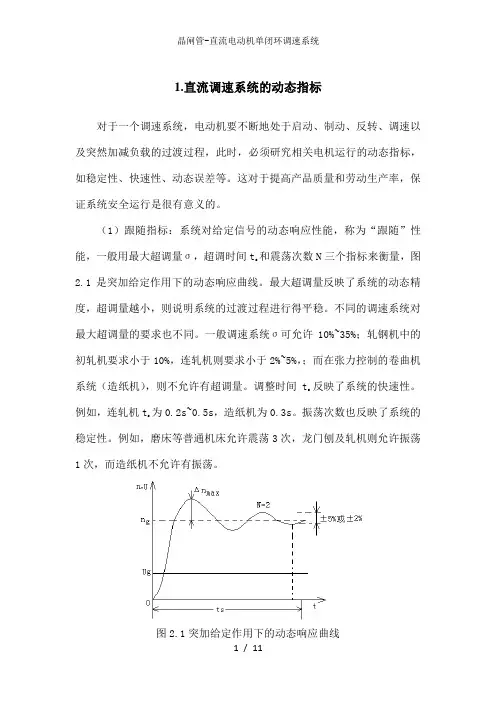
1.直流调速系统的动态指标对于一个调速系统,电动机要不断地处于启动、制动、反转、调速以及突然加减负载的过渡过程,此时,必须研究相关电机运行的动态指标,如稳定性、快速性、动态误差等。
这对于提高产品质量和劳动生产率,保证系统安全运行是很有意义的。
(1)跟随指标:系统对给定信号的动态响应性能,称为“跟随”性能,一般用最大超调量σ,超调时间t和震荡次数N三个指标来衡量,图s2.1是突加给定作用下的动态响应曲线。
最大超调量反映了系统的动态精度,超调量越小,则说明系统的过渡过程进行得平稳。
不同的调速系统对最大超调量的要求也不同。
一般调速系统σ可允许10%~35%;轧钢机中的初轧机要求小于10%,连轧机则要求小于2%~5%,;而在张力控制的卷曲机反映了系统的快速性。
系统(造纸机),则不允许有超调量。
调整时间ts为0.2s~0.5s,造纸机为0.3s。
振荡次数也反映了系统的例如,连轧机ts稳定性。
例如,磨床等普通机床允许震荡3次,龙门刨及轧机则允许振荡1次,而造纸机不允许有振荡。
图2.1突加给定作用下的动态响应曲线(2)抗扰指标:对扰动量作用时的动态响应性能,称为“抗扰”性能。
一般用最大动态速降Δnmax ,恢复时间tf和振荡次数N三个指标来衡量。
用图2.2是突加负载时的动态响应曲线。
最大动态速降反映了系统抗扰动能力和系统的稳定性。
由于最大动态速降及扰动量的大小是有关的,因此必须同时注明扰动量的大小。
恢复时间反映了系统的抗扰动能力和快速性。
振荡次数N同样代表系统的稳定性及抗扰动能力图2.2突加负载时的动态响应曲线2.晶闸管电动机直流调速系统存在的问题图2.3 V-M系统的运行范围晶闸管整流器也有它的缺点。
首先,由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
由半控整流电路构成的V-M 系统只允许单象限运行(图2.3a),全控整流电路可以实现有源逆变,允许电动机工作在反转制动状态,因而能获得二象限运行(图2.3b)。

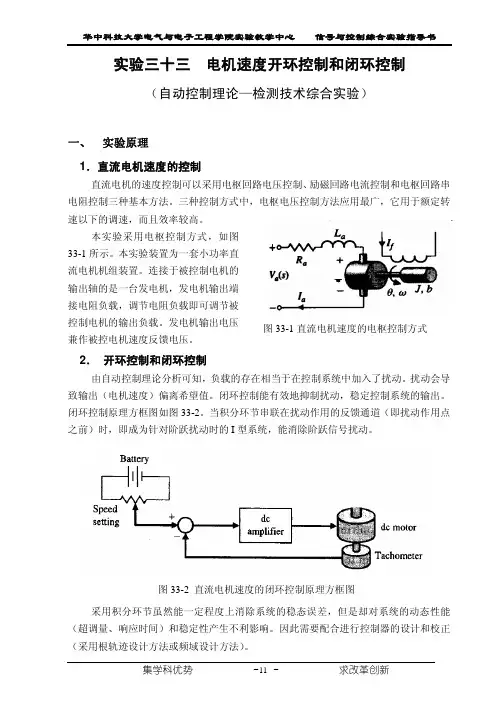
实验三十三 电机速度开环控制和闭环控制(自动控制理论—检测技术综合实验)一、 实验原理1.直流电机速度的控制直流电机的速度控制可以采用电枢回路电压控制、励磁回路电流控制和电枢回路串电阻控制三种基本方法。
三种控制方式中,电枢电压控制方法应用最广,它用于额定转速以下的调速,而且效率较高。
本实验采用电枢控制方式,如图33-1所示。
本实验装置为一套小功率直流电机机组装置。
连接于被控制电机的输出轴的是一台发电机,发电机输出端接电阻负载,调节电阻负载即可调节被控制电机的输出负载。
发电机输出电压兼作被控电机速度反馈电压。
2. 开环控制和闭环控制由自动控制理论分析可知,负载的存在相当于在控制系统中加入了扰动。
扰动会导致输出(电机速度)偏离希望值。
闭环控制能有效地抑制扰动,稳定控制系统的输出。
闭环控制原理方框图如图33-2。
当积分环节串联在扰动作用的反馈通道(即扰动作用点之前)时,即成为针对阶跃扰动时的I 型系统,能消除阶跃信号扰动。
采用积分环节虽然能一定程度上消除系统的稳态误差,但是却对系统的动态性能(超调量、响应时间)和稳定性产生不利影响。
因此需要配合进行控制器的设计和校正(采用根轨迹设计方法或频域设计方法)。
E图33-1直流电机速度的电枢控制方式图33-2 直流电机速度的闭环控制原理方框图此外,在扰动可以测量的情况下,采用顺馈控制也能有效地对扰动引起的跟踪误差进行补偿,减轻反馈系统的负担,见图33-3。
图33-3 反馈+顺馈控制方式消除扰动引起的误差式中: 为控制器传递函数,也是扰动输入时的反馈通道传递函数;)(11s G G =)(22s G G = 为被控对象(本实验中即被控直流电机)的传递函数;)(s G G c c = 为顺馈控制通道传递函数;R 为指令输入,即希望的电机速度;C 为输出被控量,即被控电机的输出速度;E 为系统的稳态误差;D 为系统的扰动输入,即电机的负载。
由扰动到输出的传递函数可知,扰动引起的稳态误差为D G G G G GE c R 212101)1(++−== (33-1) 当选择顺馈回路传递函数为 11G G c −= (33-2) 时,有00==R E ,即扰动对输出没有影响。
直流电动机调速器硬件设计论⽂题⽬:直流电动机调速器硬件设计专业:本科⽣:(签名)____指导教师:(签名)____直流电动机调速器硬件设计摘要直流电动机⼴泛应⽤于各种场合,为使机械设备以合理速度进⾏⼯作则需要对直流电机进⾏调速。
该实验中搭建了基于C8051F020单⽚机的转速单闭环调速系统,利⽤PWM信号改变电动机电枢电压,并由软件完成转速单闭环PI控制,旨在实现直流电动机的平滑调速,并对PI控制原理及其参数的确定进⾏更深的理解。
实验结果显⽰,控制8位PWM信号输出可平滑改变电动机电枢电压,实现电动机升速、降速及反转等功能。
实验中使⽤霍尔元件进⾏电动机转速的检测、反馈。
期望转速则可通过功能按键给定。
当选择⽐例参数为0.08、积分参数为0.01时,电机转速可以在3秒左右达到稳定。
由实验结果知,该单闭环调速系统可对直流电机进⾏调速,达到预期效果。
关键字:直流电机, C8051F020,PWM,调速,数字式Subject: Hardware Design of Speed Regulator for DC motor Major:Name: (Signature)____Instructor: (Signature) ____Hardware Design of Speed Regulator for DC motorAbstractThe dc motor is a widely used machine in various occasions.The speed regulaiting systerm is used to satisfy the requirement that the speed of dc motor be controlled over a range in some applications. In this experiment,the digital Close-loop control systerm is based on C8051F020 SCM.It used PI regulator and PWM to regulate the speed of dc motor. The method of speed regulating of dc motor is discussed in this paper and, make a deep understanding about PI regulator.According to experiment ,the armature voltage can be controlled linearnized with regulating the 8 bit PWM.So the dc motor can accelerate or decelerate or reverse.In experiment, hall component is used as a detector and feed back the speed .The expecting speed can be given by key-press.With using the PI regulator,the dc motor will have a stable speed in ten seconds when choose P value as 0.8 and I value as 0.01. At last,the experiment shows that the speed regulating systerm can work as expected.Key words: dc motor,C8051F020,PWM,speed regulating,digital⽬录第⼀章绪论 (1)1.1直流调速系统发展概况 (1)1.2 国内外发展概况 (2)1.2.1 国内发展概况 (2)1.2.2 国外发展概况 (3)1.2.3 总结 (4)1.3 本课题研究⽬的及意义 (4)1.4 论⽂主要研究内容 (4)第⼆章直流电动机调速器⼯作原理 (6)2.1 直流电机调速⽅法及原理 (6)2.2直流电机PWM(脉宽调制)调速⼯作原理 (7)2.3 转速负反馈单闭环直流调速系统原理 (11)2.3.1 单闭环直流调速系统的组成 (11)2.3.2速度负反馈单闭环系统的静特性 (12)2.3.3转速负反馈单闭环系统的基本特征 (13)2.3.4转速负反馈单闭环系统的局限性 (14)2.4 采⽤PI调节器的单闭环⽆静差调速系统 (15)2.5 数字式转速负反馈单闭环系统原理 (17)2.5.1原理框图 (17)2.5.2 数字式PI调节器设计原理 (18)第三章直流电动机调速器硬件设计 (20)3.1 系统硬件设计总体⽅案及框图 (20)3.1.1系统硬件设计总体⽅案 (20)3.1.2 总体框图 (20)3.2 系统硬件设计 (20)3.2.1 C8051F020单⽚机 (20)3.2.1.1 单⽚机简介 (20)3.2.1.2 使⽤可编程定时器/计数器阵列获得8位PWM信号 (23) 3.2.1.3 单⽚机端⼝配置 (23)3.2.2主电路 (25)3.2.3 LED显⽰电路 (26)3.2.4 按键控制电路 (27)3.2.5 转速检测、反馈电路 (28)3.2.6 12V电源电路 (30)3.3硬件设计总结 (31)第四章实验运⾏结果及讨论 (32)4.1 实验条件及运⾏结果 (32)4.1.1 开环系统运⾏结果 (32)4.1.2 单闭环系统运⾏结果 (32)4.2 结果分析及讨论 (32)4.3 实验中遇到的问题及讨论 (33)结论 (34)致谢 (35)参考⽂献 (36)论⽂⼩结 (38)附录1 直流电动机调速器硬件设计电路图 (39)附录2 直流电动机控制系统程序清单 (42)附录3 硬件实物图 (57)第⼀章绪论1.1直流调速系统发展概况在现代⼯业中,电动机作为电能转换的传动装置被⼴泛应⽤于机械、冶⾦、⽯油化学、国防等⼯业部门中,随着对⽣产⼯艺、产品质量的要求不断提⾼和产量的增长,越来越多的⽣产机械要求能实现⾃动调速。
《交直流调速系统运行、维护与检修》课程标准电气工程系电气自动化技术教研室课程标准是学院依据专业人才培养方案课程设置,对课程培养目标、定位、课程教学内容、学时安排等作出规定的教育指导性文件。
它是编写教材、实施教学与教学评价的依据,是管理和评价课程的基础。
课程标准中教学内容和学时,可根据具体教学需要做适当的调整和补充。
一、课程基本信息课程名称交直流调速系统运行、维护与检修课程代码024008课程类型B课程性质必修总学时88学分 5.5实践学时32实践学时比例36.36%适用专业电气自动化技术专业、机电一体化技术专业备注信息二、课程定位《交直流调速系统运行、维护与检修》课程是电气自动化技术专业开设的专业核心课程;是综合性很强的专业必修课程;也是学生获得中级维修电工、常用电机检修工资格所必须掌握的一门课程。
完成交、直流调速系统的运行、维护与检修等工作任务是保障企业正常生产的重要环节,因此,掌握交、直流调速系统的基本组成、工作原理、运行方式、维护方法、检修手段是本门课程的总体教学目标。
本课程是前修课程的综合,前修课程为学习本课程做了铺垫,后修课程需要本课程的支撑,因此它在课程体系中起到承前启后,上下衔接的重要作用。
前期课程:高等数学、工程制图、电工应用技术、电子产品安装与调试、电机控制设备安装调试与维修、电力电子技术、传感器技术及应用、PLC与组态控制技术、微型计算机控制技术。
后续课程:交直流调速系统运行与维护实训、维修电工职业资格培训与鉴定、毕业顶岗实习、毕业综合技能训练。
三、课程教学设计思路本课程遵循学生职业能力培养的基本规律,以企业调研及邀请行业专家对专业所涵盖的职业岗位进行任务和职业能力分析,并以工作任务为引领确定本课程的结构,以职业能力为基础确定本课程的内容。
围绕掌握本专业职业能力来组织相应的知识、技能和素质等内容,设计相应的实践活动;采用“项目导向、任务驱动”、“能力递进”、“工学结合、校企合作”、“翻转课堂”等多种教学模式;教学实施过程中充分利用数字化教学资源及互联网教学平台,教学方法多样;在教学过程中注重培养学生安全文明生产的意识,增强其职业能力拓展的后劲,满足职业生涯发展需要。
一、复习:直流调速系统问题1-1:电机的分类?①发电机(其他能→电能)直流发电机交流发电机②电动机(电能→其他能)直流电动机:有换向器直流电动机(串励、并励、复励、他励)无换向器直流电动机(又属于一种特殊的同步电动机)交流电动机:同步电动机异步电动机:鼠笼式绕线式:伺服电机旋转变压器控制电机自整角机力矩电机测速电机步进电机(反应式、永磁式、混合式)问题1-2:衡量调速系统的性能指标是哪些?①调速范围D=n max/n min=n nom/n min②静差率S=△n nom/n0*100%对转差率要求高,同时要求调速范围大(D大S小)时,只能用闭环调速系统。
③和负载匹配情况:一般要求:恒功率负载用恒功率调速,恒转矩负载用恒转矩调速。
问题1-3:请比较直流调速系统、交流调速系统的优缺点,并说明今后电力传动系统的发展的趋势.*直流电机调速系统优点:调速范围广,易于实现平滑调速,起动、制动性能好,过载转矩大,可靠性高,动态性能良好。
缺点:有机械整流器和电刷,噪声大,维护困难;换向产生火花,使用环境受限;结构复杂,容量、转速、电压受限。
* 交流电机调速系统(正好与直流电机调速系统相反)优点:异步电动机结构简单、坚固耐用、维护方便、造价低廉,使用环境广,运行可靠,便于制造大容量、高转速、高电压电机。
大量被用来拖动转速基本不变的生产机械。
缺点:调速性能比直流电机差。
* 发展趋势:用直流调速方式控制交流调速系统,达到与直流调速系统相媲美的调速性能;或采用同步电机调速系统.问题1-4:直流电机有哪几种?直流电机调速方法有哪些?请从调速性能、应用场Φ-=e K IR U n 合和优缺点等方面进行比较. 哪些是有级调速?哪些是无级调速?直流电动机中常见的是有换向器直流电动机,可分为串励、并励、复励、他励四种,无换向器直流电动机属于一种特殊的同步电动机。
根据直流电机的转速公式,调速方法有变压调速、变电阻调速和变转差率调速。
电气测量综合控制系统设计报告
设计名称:直流电动机开环调速系统仿真
姓名:田雪峰学号:20134680
专业班级:自动化13-02
指导教师:侯淑萍、勇
系(院):信息工程学院
设计时间:2016.05.22~2016.06.03
课程设计成绩评定表(在相应栏目打√)
评价质量
评价项目
优秀良好一般及格不及格工作量和态度
实验、计算可靠性
目录
1 绪论.................................................................1.1 技术数据.............................................................
1.2 设计任务.............................................................
2 开环系统直流调速系统的工作原理.....................................2.1开环直流调速系统的组成与原理........................................2.2开环直流调速系统的静特性分析........................................2.3开环直流调速系统的稳态结构图........................................
2.4开环直流调速系统的数学模型..........................................
3 开环系统直流调速系统的硬件电路设计与实现...........................3.1晶闸管整流电路及保护电路..............................................3.2触发控制电路..........................................................3.3系统给定..............................................................3.4检测电路..............................................................
4 转速、电流调节器的设计与实现..........................................4.1电流调节器的设计与实现................................................4.2转速调节器的设计与实
现................................................
5 开环直流调速系统仿真...............................................
6 设计心得体会.........................................................参考文献................................................................附录:开环直流调速系整体电路图.........................................
1 绪论
1.1技术数据
1.1.1开环控制的作用
开环控制是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的控制作用发生影响,不具备自动修正的能力。
1.1.2主要动态性能
1)上升时间tr:响应曲线从零到第一次达到稳态值所需要的时间。
2)调节时间ts:响应曲线从零到达并停留在稳态值的±5%或±2%误差围所需要
的最小时间。
3)超调量σ%:系统在响应过程中,输出量的最大值超过稳态值的百分数。
(开环控制的作用;主要动态性能;设计目的)。
1.2设计任务
控制系统包括给定信号,晶闸管触发装置及整流环节、平波电抗器和直流电动机四个环节。
正文部分一律用小四号字,宋体,1.5倍行距。
2 开环系统直流调速系统的工作原理
2.1 开环直流调速系统的组成与原理
开环直流调速系统通过调节控制电压就可以可改变电动机的转速,此试验中采用在给定电压下、触发角一定时改变负载的大小测出电动机转速与电流的关系,在一定围可实现无级调速。
直流电动机电枢由三相晶闸管整流电路经平波电抗器L供电,并通过改变触发器移相控制信号Uc调节晶闸管的控制角,从而改变整流器的输出电压实现直流电动机的调速。
在仿真中为了简化模型,省略了整流变压器和同步变压器,整流器和触发同步使用同一交流电源,直流电动机励磁由直流电源直接供。
正文部分一律用小四号字,宋体,1.5倍行距。
2.2开环直流调速系统的静特性分析
(1)调速围
生产机械要求电动机提供的最高转速n max和最低转速n min之比叫做调速围,用字母D表示,即
D=n max/n min
其中,n max和n min一般都指电动机额定负载时的最高和最低转速。
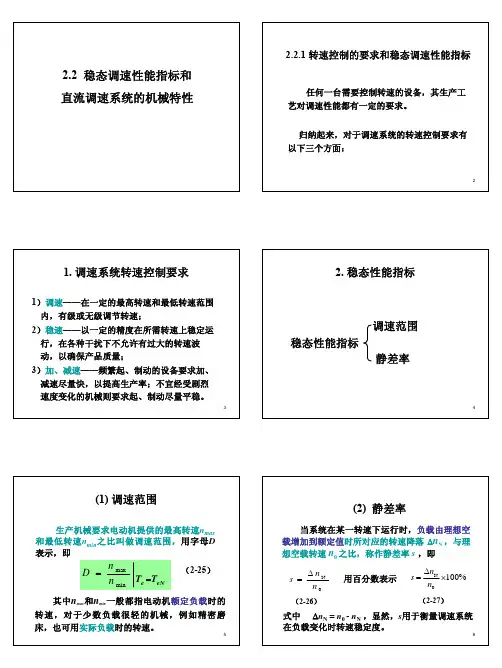
(2)静差率
当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落△n N ,与理想空载转速n0之比,称作静差率s,即
s=△n N/n0
显然,静差率是用来衡量调速系统在负载变化时转速的稳定度的。
它和机械特性的硬度有关,特性越硬,静差率越小,转速的稳定度就越高。
然而静差率与机械特性硬度又是有区别的。
一般变压调速系统在不同转速下的机械特性是互相平行的,对于同样硬度的特性,理想空载转速越低时,静差率越大,转速的相对稳定度也就越差。
由此可见,调速围和静差率这两项指标并不是彼此孤立的,必须同时提才有意义。
在调速过程中,若额定速降相同,则转速越低时,静差率越大。
如果低速时的静差率能满足设计要求,则高速时的静差率就更能满足要求了。
因此,调速系统的静差率指标应以最低速进所能达到的数值为准。
正文部分一律用小四号字,宋体,1.5倍行距。
2.3开环直流调速系统的稳态结构图
正文部分一律用小四号字,宋体,1.5倍行距。
2.4开环直流调速系统的数学模型
正文部分一律用小四号字,宋体,1.5倍行距。
2.5直流开环调速系统电路原理图
正文部分一律用小四号字,宋体,1.5倍行距。
3开环系统直流调速系统的硬件电路设计与实现3.1 晶闸管整流电路及保护电路
正文部分一律用小四号字,宋体,1.5倍行距。
3.2 触发控制电路
正文部分一律用小四号字,宋体,1.5倍行距。
3.3 系统给定
正文部分一律用小四号字,宋体,1.5倍行距。
3.4 检测电路
正文部分一律用小四号字,宋体,1.5倍行距。
4 转速、电流调节器的设计与实现
4.1 电流调节器的设计与实现
正文部分一律用小四号字,宋体,1.5倍行距。
4.2 转速调节器的设计与实现
正文部分一律用小四号字,宋体,1.5倍行距。
5 开环直流调速系统仿真
正文部分一律用小四号字,宋体,1.5倍行距。
6 设计心得体会
正文部分一律用小四号字,宋体,1.5倍行距。
参考文献[1] 正文部分一律用小四号字,宋体,1.5倍行距。
附录:开环直流调速系整体电路图。