工业机器人 吸附式末端执行器
- 格式:pdf
- 大小:2.04 MB
- 文档页数:29
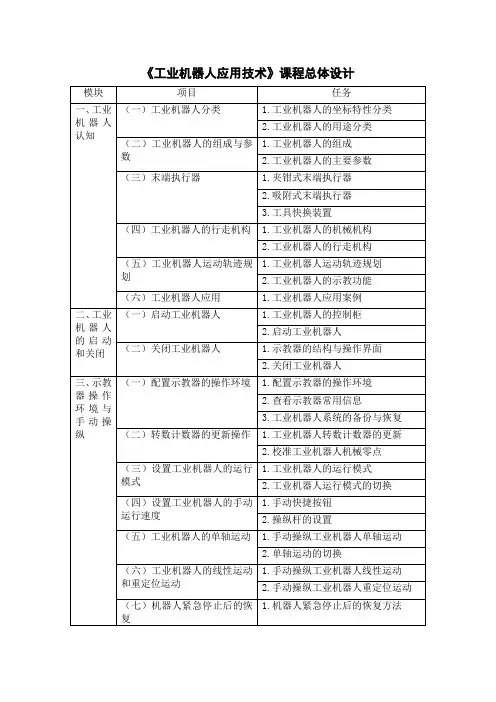
工业机器人末端执行器的类型及应用。
工业机器人末端执行器是指安装在机器人末端的用于完成特定任务的执行部件。
根据不同的应用需求,工业机器人末端执行器有多种类型,每种类型都有其特定的功能和应用领域。
一、夹持型末端执行器夹持型末端执行器主要用于夹持、抓取物体。
它们通常具有可调节的夹持力和灵活的夹持方式,可以适应不同形状、不同尺寸的物体。
夹持型末端执行器广泛应用于装配线、物流仓储、食品加工等领域,用于自动抓取和搬运物体。
二、剪切型末端执行器剪切型末端执行器主要用于切割、剪切材料。
它们通常具有高速、高精度的切割能力,可以在短时间内完成大量的切割任务。
剪切型末端执行器广泛应用于金属加工、纺织工业、塑料加工等领域,用于自动切割和剪裁材料。
三、焊接型末端执行器焊接型末端执行器主要用于焊接工艺。
它们通常具有稳定的电弧、精确的定位和高速的焊接速度,可以实现高质量的焊接效果。
焊接型末端执行器广泛应用于汽车制造、船舶建造、建筑结构等领域,用于自动焊接和焊接工艺。
四、喷涂型末端执行器喷涂型末端执行器主要用于涂装、喷涂工艺。
它们通常具有均匀的喷涂效果、可调节的喷涂厚度和高速的喷涂速度,可以实现高质量的涂装效果。
喷涂型末端执行器广泛应用于汽车制造、家具制造、建筑装饰等领域,用于自动喷涂和涂装工艺。
五、钻削型末端执行器钻削型末端执行器主要用于钻孔、铣削等工艺。
它们通常具有高速、高精度的钻削能力,可以在短时间内完成复杂的加工任务。
钻削型末端执行器广泛应用于机械制造、航空航天、电子零部件等领域,用于自动钻削和加工工艺。
六、测量型末端执行器测量型末端执行器主要用于测量、检测工艺。
它们通常具有高精度的测量能力和灵活的测量方式,可以实现精确的尺寸测量和质量检测。
测量型末端执行器广泛应用于质量控制、精密加工、医疗器械等领域,用于自动测量和检测工艺。
工业机器人末端执行器的类型多样化,每种类型都有其特定的功能和应用领域。
这些末端执行器的应用可以大幅提高生产效率、降低劳动强度,并且具有一定的灵活性和适应性,能够适应不同的工业生产需求。


工业机器人末端执行器的特点
工业机器人末端执行器是机器人系统中最重要的部件之一,主要用于完成机器人的操作任务。
下面是工业机器人末端执行器的特点:
1. 多样性:工业机器人末端执行器的种类非常多,可以根据不同的应用场景和任务需求进行选择和定制。
常见的末端执行器包括夹爪、磁性吸盘、喷涂枪、焊枪、剪切器等。
2. 灵活性:工业机器人末端执行器可以根据需要进行快速更换,从而实现不同任务的自动化生产。
这种灵活性可以大大提高生产效率和生产线的灵活性。
3. 精度:末端执行器可以实现高精度的操作,例如在精密加工和装配过程中,可以精确地定位和操作零件,从而提高产品的质量和生产效率。
4. 可编程性:工业机器人末端执行器可以通过编程实现自动化操作,可以根据需要进行编程,从而实现不同的操作任务。
5. 安全性:末端执行器可以通过安全控制系统进行监控和控制,从而保证操作的安全性。
例如,在与人类共同工作的场景中,可以通过安全传感器和安全控制系统实现安全操作。
6. 耐用性:末端执行器通常采用高强度材料制造,具有较高的耐用性和抗磨损性,可以在恶劣的工作环境中长时间工作。
总之,工业机器人末端执行器是机器人系统中非常重要的部件,具有多样性、灵活性、精度、可编程性、安全性和耐用性等特点,可以大大提高生产效率和产品质量。
工业机器人机械手末端执行器设计与控制工业机器人是现代制造业中不可或缺的重要设备,而机械手末端执行器则是工业机器人的核心组成部分。
它的设计和控制直接影响着工业机器人的性能和效率。
本文将重点讨论工业机器人机械手末端执行器的设计与控制。
一、机械手末端执行器的设计机械手末端执行器是机械手用来完成工件抓取、放置等操作的部件。
它通常由机械结构和驱动系统两部分组成。
在机械结构设计中,需要考虑到机械手的使用场景和工件的特点,以确定合适的末端结构。
比如,如果需要抓取重物,末端结构应具备足够的力量和稳定性;如果需要进行精细操作,末端结构则需要更好的灵活性和精度。
同时,机械结构的材料选择和制造工艺也是设计的重要因素。
合适的材料可以提高机械手的耐久性和抗磨性,而先进的制造工艺则可以提高结构的精度和稳定性。
在驱动系统设计方面,需要选择合适的执行器来驱动机械手末端执行器。
常见的驱动方式包括电动、液压和气动。
不同的驱动方式有着各自的特点和适用场景。
电动执行器具有精度高、响应快的优点,适用于精细操作;而液压和气动执行器则适用于高力矩和高速度的操作。
二、机械手末端执行器的控制机械手末端执行器的控制是指通过控制系统来实现对机械手末端执行器的运动和动作的控制。
在控制系统设计中,需要考虑到机械手末端执行器的运动规划和轨迹控制。
运动规划是指确定机械手末端执行器在三维空间中的位置和姿态,以完成特定的操作。
轨迹控制则是指通过控制执行器的运动轨迹,使其按照设计要求进行工作。
为了更好地实现机械手末端执行器的控制,通常会采用传感器来获取执行器的状态信息,如位置、力量和速度等。
这些传感器可以提供实时的反馈信息,帮助控制系统准确地感知执行器的运动状态,从而实现精确的控制。
此外,控制系统还需要考虑到机械手末端执行器与环境之间的交互。
比如,在与人工操作员共同工作的场景中,机械手末端执行器需要具备人机协作能力和安全保护措施,以避免潜在的安全风险。
三、机械手末端执行器的发展趋势随着智能制造和人工智能技术的不断发展,工业机器人机械手末端执行器也在不断演进。

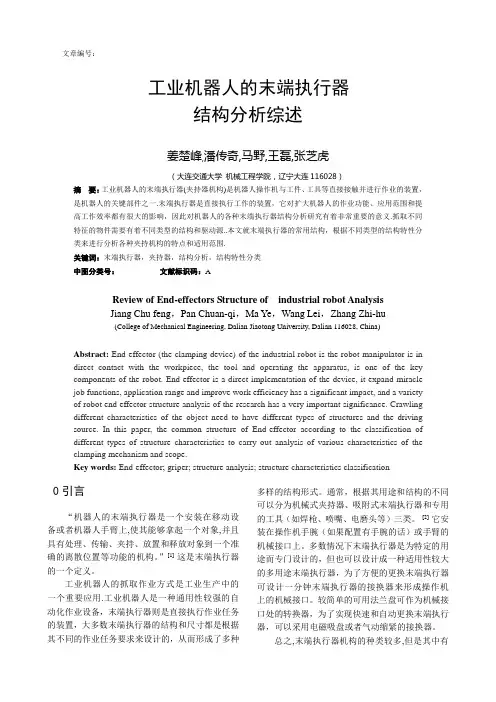
工业机器人末端执行器是指安装于机器人手腕上,直接与工件接触的部件。
末端执行器的种类繁多,根据其工作原理和应用场合可分为以下几类:
1.夹钳式末端执行器:又称为抓手,常用于搬运和装配。
根据抓握原理,夹钳
式末端执行器可分为气动和电动两种类型。
2.吸附式末端执行器:利用吸附力来抓取工件,分为气动和电动两种类型。
其
中,气动吸附式末端执行器适用于工件表面为平面或近似平面的情况,而电动吸附式末端执行器适用于工件表面为曲面或不规则的情况。
3.工具式末端执行器:是一种通用型执行器,可以与多种工具配合使用,如切
割、打磨、装配等。
4.专用末端执行器:针对特定工作要求而设计,如分拣、码垛、焊接等。


工业机器人末端执行器概述项目一工业机器人末端执行器概述任务一工业机器人末端执行器的定义导入●工业机器人末端执行器定义?●工业机器人常用的末端执行器的种类?目录学习目标知识准备任务实施主题讨论12学习目标掌握工业机器人末端执行器的定义掌握工业机器人常用末端执行器的种类知识目标工业机器人末端执行器的定义一、工业机器人与末端执行器的关系知识准备随着机器人技术的飞速发展及其在各个领域的广泛应用,作为机器人与环境相互作用的最后执行部件,末端执行器对机器人智能化水平和作业水平的提高具有十分重要的作用,机器人末端执行器的工作能力的研究受到了极大的重视,常见的末端执行器如图所示。
电钻削头电磨头焊枪激光头拧螺母机抛光头1.工业机器人末端执行器的定义工业机器人的末端执行器是一个安装在移动设备或者机器人手臂上,使其能够拿起一个对象,并且具有处理、传输、夹持、放置和释放对象到一个准确的离散位置等功能的机构。
1.工业机器人末端执行器的定义工业机器人末端执行器可能包含机器人抓手,机器人工具快换装置,机器人碰撞传感器,机器人旋转连接器,机器人压力工具,机器人喷涂枪,机器人毛刺清理工具,机器人弧焊焊枪,机器人电焊焊枪等等。
1.工业机器人末端执行器的定义为了方便的更换末端执行器,可设计一分钟末端执行器的转换器来形成操作机上的机械接口。
较简单的可用法兰盘来作为机械接口处的转换器,为了实现快速和自动更换末端执行器,可以采用电磁吸盘或者气动缩紧的接换器。
机器人手爪是末端执行器的一种形式,机器人末端执行器是安装在机器人手腕上用来进行某种操作或作业的附加装置。
2.机器人末端执行器的种类机器人末端执行器的种类很多,以适应机器人的不同作业及操作要求。
机器人末端执行器可分为:搬运用末端执行器加工用末端执行器测量用末端执行器等。
2.机器人末端执行器的种类搬运用末端执行器是指各种夹持装置,用来抓取或吸附被搬运的物体。
2. 机器人末端执行器的种类加工用末端执行器是带有喷枪、焊枪、砂轮、铣刀等加工工具的机器人附加装置,用来进行相应的加工作业。
工业机器人搬运机器人末端执行器应用第一部分概述
末端执行器是一种可以实现搬运和多种操作功能的工业机器人组件。
它与其它柔性机械部件如传动机构、传感器和控制器结合使用,可以完成各种机械动作,如镗孔、焊接、拆解等。
末端执行器可以实现搬运机器人的操作功能,是搬运机器人工作的关键部件。
随着新技术的出现,末端执行器变得越来越先进,有助于各种工业应用的性能提升。
第二部分技术原理
末端执行器是一种用来控制机械臂和机械手的装置,可以实现规定的动作,如移动、抓取和夹持。
它的核心是一个控制模块,利用传感器和处理器来控制机械臂的运动,可以根据特定的程序来确定机械臂和机械手的位置和方向,以完成特定的工作。
末端执行器的主要组成部分包括:控制模块、传感器、传动机构和夹具。
控制模块是一个数字计算机,可以实时读取和处理传感器输入,并控制机械臂和机械手的相应动作。
传感器可以获取机械臂和机械手的位置、方向和运动数据,以确定其位置和方向。
传动机构是机械臂的主要元件,可以将计算机指令转化为机械动作,以完成任务。
夹具用来抓取和夹持物体,使其移动和处理。
第三部分应用
末端执行器通常用于搬运机器人。
简析机器人末端执行器的设计要求和结构分类( 1 ) 设计要求1.无论是夹持式还是吸附式,机器人的末端执行器还需要有满足作业所需要的重复精度。
工业机器人末端执行器(抓手)2.应该尽可能的使机器人末端执行器的结构简单并且且紧凑,质量轻,以减轻手臂的负荷。
专用较通用的机器人末端执行器结构较简单,但工作效率高,而且能够完成各种作业,而对于“万能”末端执行器来说可能会带来结构较复杂,费用昂贵等缺点,因此提倡设计使用可快速更换的系列化的且通用化的专用机器人末端执行器。
末端执行器的要素、特征、参数的联系见下图。
末端执行器的要素特征参数末端执行器要素1.机构形式2.抓取方式3.抓取力4.驱动装置及控制物件特征质量、外形、重心位置、尺寸大小、尺寸公差、表面状态、材质、强度操作参数操作空间环境,操作准确度,操作速度和加速度,夹持时间( 2 ) 结构分类上下料工业机器人中所应用的机械夹持式末端执行器多为双指头爪式,如果按手指的运动来分可以分为平移型和回转型。
若按照机械夹持方式来分可以分为外夹式和内撑式,若按照机械结构特性来进行分类的话,可以分为电动(电磁)式、液压式与气动式,以及他们相互的组合。
气吸式末端执行器气吸式机器人末端执行器利用吸盘内产的负压产生的吸力来吸住并移动工件。
吸盘就是用的软橡胶或者是塑料制成的皮碗中形成的负压来吸住工件。
此种机器人末端执行器适用于吸取大而薄、刚性差的金属或木质板材、纸张、玻璃和弧形壳体等作业零件。
根据应用场合不同,末端执行器可以做成单吸盘、双吸盘、多吸盘或特殊形状的吸盘。
按形成负压的方法有以下几种方式:(1)挤压式吸盘;(2)气流负压式吸盘;(3)真空泵排气式吸盘。
1)挤压式吸盘挤压排气式吸盘靠向下挤压力将吸盘中的空气全部排出,使其内部形成负压状态然后将工件吸住。
有结构简单、重量轻、成本低等优点。
但是吸力不大,多用于序曲尺寸不太大,薄而轻的工件。
2)气流负压式吸盘气流控制阀将来自气泵中的压缩空气自喷嘴喷入,形成高速射流,将吸盘内腔中的空气带走从而使腔内形成负压,然后吸盘吸住物体,如若作业现场有压缩空气供应使用这种吸盘比较方便,且成本低。