弹簧阻尼系统动力学模型ams仿真
- 格式:docx
- 大小:84.11 KB
- 文档页数:4
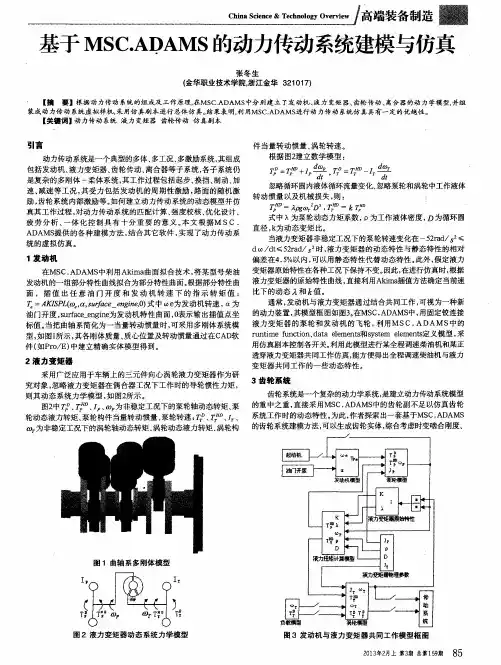
基于ADAMS的圆环链传动系统仿真分析于之龙【摘要】为了研究圆环链传动系统的动力学行为,应用Pro/E和ADAMS建立圆环链传动系统仿真模型,链环之间的接触用弹簧阻尼模型来定义,链环之间的阻力用场力来定义,仿真结果与圆环链传动系统实际运行结果一致.通过仿真验证了该模型的有效性,为研究该类系统的动力学特性提供了一种合理、可靠的方法.【期刊名称】《机械管理开发》【年(卷),期】2018(033)009【总页数】3页(P99-101)【关键词】圆环链传动;弹簧阻尼模型;场力;建模;仿真【作者】于之龙【作者单位】山西新景矿煤业有限责任公司, 山西阳泉045000【正文语种】中文【中图分类】TD528.3引言圆环链传动是一种啮合传动方式。
圆环链传动有很多优点,很强的适应能力、承受外力冲击的能力和抗震能力、较高传动效率,同时安装水平的要求比较低[1]。
由于其非常多的优点,因此被广泛地应用在很多行业,如冶金、航天、食品加工等[2]。
圆环链传动也有一定缺点,圆环链传动的多边形效应致使其运动的稳定性能比较差,平稳性不够使得传动过程中动载荷增大,动载荷会进一步损坏传动链条[3]。
学者们通过广泛的研究来寻求解决圆环链传动过程中存在问题的办法。
1 三维实体建模三维建模的软件和方法有很多,通过比较各个建模软件的效率,本文选择Pro/E建模软件进行圆环链传动装置模型的建立。
1.1 零部件建模圆环链传动系统由很多部件组成,其中圆环链和链轮是圆环链传动系统的重要组件。
平链环和立链环连接起来构成了圆环链。
通过焊接得到平链环,通过锻造得到立链环。
立链环和平链环的规格为48 mm×152 mm,根据国标《矿用圆环链驱动链轮》,建立与立链环和平链环规格匹配的链轮。
1.2 系统装配为了节约仿真模拟耗用时间,在保证仿真结果准确性的基础上,只分别布置10个链环在上、下边链上。
2 ADAMS中的仿真模型将装配好的圆环链传动装置模型接入ADAMS中,同时为了简便处理,把模型里的零件当做不会变形的刚体来处理,所有零件属性均定义为钢。
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
基于ADAMS的悬架系统动力学仿真分析与优化设计摘要:本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,应用动力学仿真技术,研究了悬架系统在不同工况下的动力学性能,并进行了相应的优化设计。
仿真结果表明,通过优化设计,悬架系统的动力学性能得到了明显的提升,进而提高了整车的操纵稳定性和行驶舒适性。
1. 引言随着汽车工业的发展,悬架系统的性能对于整车的操纵稳定性和行驶舒适性起着至关重要的作用。
因此,对悬架系统进行动力学仿真分析和优化设计具有重要的理论意义和工程应用价值。
2. 悬架系统模型建立首先,根据悬架系统的实际结构和工作原理,建立了悬架系统的运动学和动力学模型。
模型包括弹簧、减振器、转向杆等各个部件,并考虑了车轮与地面之间的接触力和摩擦力。
通过ADAMS软件的建模工具和功能,对悬架系统进行了准确地建模。
3. 悬架系统动力学仿真基于悬架系统的模型,进行了不同工况下的动力学仿真分析。
通过设定不同的工况参数,如路面不平度、悬架系统参数等,研究了悬架系统在不同路况下的动力学性能。
仿真结果显示了悬架系统的悬架行程、车体加速度、横向加速度、滚动转矩等关键参数的变化规律。
4. 悬架系统优化设计根据悬架系统动力学仿真的结果,对悬架系统进行了优化设计。
通过改变悬架系统的参数和结构,优化了悬架系统的动力学性能。
具体而言,通过增加弹簧刚度、调整减振器阻尼等方式改善了悬架系统的行程和刚度特性。
通过优化悬架系统的参数,达到了提高整车操纵稳定性和行驶舒适性的目的。
5. 结果与分析通过悬架系统动力学仿真和优化设计,得到了悬架系统在不同工况下的性能变化趋势。
仿真结果表明,通过合理的优化设计,悬架系统的行程和刚度均得到了明显的改善。
同时,整车的操纵稳定性和行驶舒适性也得到了显著提升。
6. 结论本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,进行了不同工况下的仿真分析,并进行了相应的优化设计。

机械设计中的动态系统建模与仿真在现代机械设计领域,动态系统建模与仿真已经成为了不可或缺的重要环节。
它就像是为机械设计赋予了一双“先见之明”的眼睛,能够让设计师在产品实际制造之前,就对其性能、行为和潜在问题有清晰的认识和预测。
动态系统建模,简单来说,就是将实际的机械系统转化为数学模型的过程。
这个数学模型可不是随便写写的,它需要准确地反映出机械系统的各种特性和行为。
比如说,一个机械臂的运动,要考虑到它的关节转动、杆件长度、质量分布,以及外部施加的力和扭矩等等因素。
通过建立这样的模型,我们可以用数学语言来描述机械系统的工作原理和动态特性。
那么,如何进行动态系统建模呢?这可不是一件简单的事情,需要综合运用物理学、力学、数学等多学科的知识。
首先,我们要对机械系统进行详细的分析,了解其各个组成部分的结构和功能。
然后,根据这些分析,选择合适的数学工具和方法来构建模型。
常见的建模方法有微分方程法、传递函数法、状态空间法等等。
以一个简单的弹簧质量阻尼系统为例。
我们知道,弹簧会产生与变形量成正比的弹力,质量会产生惯性力,阻尼会产生与速度成正比的阻力。
根据牛顿第二定律,可以列出这个系统的运动方程:$m\ddot{x} + c\dot{x} + kx = F(t)$,其中$m$是质量,$c$是阻尼系数,$k$是弹簧刚度,$x$是位移,$F(t)$是外部施加的力。
这就是一个简单的动态系统模型。
有了模型之后,仿真就登场了。
仿真是利用计算机技术对建立的模型进行数值求解和模拟运行的过程。
通过仿真,我们可以得到机械系统在不同条件下的响应,比如位移、速度、加速度、受力等等。
在仿真过程中,需要选择合适的仿真软件和工具。
目前市场上有很多优秀的仿真软件,如 MATLAB/Simulink、ADAMS、ANSYS 等等。
这些软件都具有强大的功能和友好的用户界面,可以帮助我们轻松地进行建模和仿真。
比如说,在汽车设计中,我们可以利用仿真来模拟汽车在不同路况下的行驶性能。
基于AMESim的安溢活门系统动力学仿真作者:刘靖东喻天翔宋笔锋金朋来源:《计算机辅助工程》2014年第01期摘要:在对安溢活门工作原理和动态特征方程研究的基础上,建立安溢活门及其试验系统的AMESim模型,对试验过程中安溢活门的动态特性进行数值仿真,从系统角度研究该安溢活门系统整体性能.仿真结果与试验测试结果吻合较好,并着重研究主副弹簧刚度、主副膜片刚度、主副膜片有效面积、主活阀摩擦阻尼、背压腔容积和泄压间隙等参数对安溢活门动态特性的影响,进而为系统整体性能优化提供分析设计支持.关键词:安溢活门; AMESim;系统仿真;动态特性;流固耦合中图分类号: V434.1文献标志码: B0引言安溢活门是一种能依靠气体介质本身自有的能量实现管路自动开闭的机械装置.作为液体火箭增压输送系统的一种多功能元件,安溢活门可在地面测试和空中飞行时作为安全阀使用,在贮箱卸压和加注时作为排气阀使用,在加注过量或加注设备不能正常工作导致不能停止加注时作为溢出阀使用.与安全阀等阀门一样,安溢活门在使用过程中存在振动和鸣叫等问题,发生振动鸣叫的主要原因是系统动态特性不满足稳定性需求.振动鸣叫直接导致敏感元件膜片疲劳破裂,致使安溢活门功能失效,进而影响发射的成败,因此对安溢活门动态特性开展深入研究有重要的工程应用价值.目前,研究活门动态特性主要采用试验和数值分析两种方法.试验方法直接、可靠,但费用相对较高,数值分析方法经济、快捷,而且可以分析出试验难以考核的工况,有助于全面系统地了解产品特性.数值分析方法主要包括流固耦合仿真和系统动力学仿真.流固耦合仿真偏重于从场的角度研究局部耦合的影响,可以精细地分析流固耦合作用,但是存在计算量大和分析周期长的弊端;系统动力学仿真主要对局部影响进行简化,着重从系统角度研究整体性能,可以方便地进行大量的数值试验,并进行系统整体性能寻优.作为一种数值预测方法,系统动力学仿真在很多领域已取得很大发展.国外学者采用数值仿真方法对弹(箭)体活门动态特性进行过大量分析研究工作.SORLI等[1]对气动压力阀进行仿真和试验研究;SCHALLHORN[2]对推进系统多种瞬态变化下压力调节器的响应机制进行仿真分析;YANG等[3]采用数值仿真方法分析主要设计参数变化对肼基燃料卫星推进系统输送行为的影响.在国内,武唯强等[4]对恒压加载式冷氦压力调节器进行仿真研究;张炜等[5]对液体导弹动力系统过渡工作过程和动态故障特性进行数值仿真.AMESim提供一个复杂多学科领域系统工程设计平台,采用集总参数方法建模,将流体、机械、液压、气动、热、电、磁和控制等学科领域的物理原型进行抽象,并进行不同功能单元模块分割,进而划分归类形成机械、液压、气动、控制、热和电磁等模型库;不同学科间模块直接连接,可以方便地进行多学科多领域系统工程建模.本文建立安溢活门主阀、指挥阀及其试验系统的AMESim系统动力学模型,对安溢活门试验过程中的动态特性进行数值仿真,研究系统各参数对安溢活门动态特性的影响.1安溢活门工作原理箭体一、二级及助推器所用安溢活门采用指挥式结构,由主阀和副阀组成,副阀控制主阀启闭.[6]主阀膜片将阀腔分成主阀腔(A)和背压腔(B);副阀膜片感受压力变化,控制背压腔的压力充放.工作原理见图1.2阀门动力学特征方程阀门动力学特征方程详见文献[7],主要包括运动系统动力学方程、气动系统动力学方程、热系统动力学方程、电路系统动力学方程和电磁系统动力学方程等.2.1运动系统动力学方程3安溢活门AMESim模型与功率键合图法类似,AMESim建模方法采用集总参数方法,将系统不同功能单元进行模块分割,划分为机械、液压、气动和控制等模型库,用图形方式描述系统中各元件的相互关系,反映元件间的负载效应和系统中功率流动情况.元件间可双向传递数据,且变量一般具有实际物理意义,遵循因果关系.系统AMESim模型与系统工作原理图非常接近,能更直观地反映系统工作原理[9],而且可以在仿真过程监视方程特性并自动选择求解算法以获得最佳结果,省去求解算法的选择,使设计人员能够更多地关注仿真物理模型.根据安溢活门工作原理,安溢活门及其试验系统[1]主要划分为质量弹簧阻尼模型、平板阀模型、气容模型、管路模型、孔板模型、活塞模型和膜片模型等.主副膜片刚度由结构有限元计算给出,系统AMESim模型见图2,上半部分模拟指挥阀,下半部分模拟主阀.4仿真结果与试验结果对比采用非接触测量得到的安溢活门试验过程中,大流量性能试验时主活阀动态位移与仿真结果的对比见图3,可知:仿真结果较准确地模拟开阀的动态调整过程,且试验测试结果与仿真结果趋于同一开度,调整频率与试验几乎完全吻合,但调整幅值仿真结果比试验结果稍大.其主要原因是系统动力学仿真方法不考虑流场的不均匀性及非定常性,必然造成作用在运动部件上压强计算的误差.开阀之始,该误差在活阀驱动力中相对较小,因此仿真较准确地计算出第一次调整的幅值;随着不平衡力的减小,活阀振动位移不断减小,误差在不平衡力中所占比重增加,因此幅值误差越来越大,以至于试验测量幅值增加主要由系统不稳定造成.5仿真结果分析在正确模拟安溢活门试验过程中动态特性基础上,研究系统参数对动态性能的影响,主要包括主副弹簧刚度、主副膜片刚度、主副膜片有效面积、主活阀摩擦阻尼、背压腔容积和泄压间隙等.5.1主副弹簧刚度影响由图4和5可知:主弹簧刚度对系统动态位移和压强特性影响很小,副弹簧刚度对动态位移影响也较小,对主阀腔压强影响则相对较大;副弹簧刚度越大主阀腔压强冲值越高,波动周期越长.从系统灵敏度角度考虑应选用刚度较小的副弹簧,不同副弹簧刚度造成的稳定压强的不同,可通过副弹簧预压调整.5.2主副膜片刚度影响0.75,1.00和1.25倍现有主膜片刚度下主活阀动态位移和主阀腔压强曲线见图6,可知,主膜片刚度对系统动态特性影响很大,体现在对振动幅值的影响上:主膜片刚度越大振动幅值越小,振动越容易趋于稳定;主膜片刚度对振动频率的影响则很小,主要是由于安溢活门采用指挥式结构,主活阀动态特性主要由指挥阀性能决定.0.75,1.00和1.25倍现有副膜片刚度下主活阀动态位移和主阀腔压强曲线见图7,可知,副膜片刚度对系统动态特性的影响与副弹簧相似,因此应选用刚度小的膜片.由于刚度与强度密切相关,在实际设计中从安全角度出发,应协调考虑副膜片刚度与副弹簧刚度,在满足灵敏性和精度的前提下尽量采用刚度大的副膜片.5.3主副膜片有效面积影响由图8可知,主膜片有效面积对动态特性影响很大:主膜片有效面积越大,主活阀振动幅值越大,振动越不容易趋于稳定,主阀腔压强波动幅值越大,波动频率越高.因此,在满足开启要求的情况下,应尽量减小主膜片的有效面积.6结论通过建立安溢活门及其试验系统AMESim模型,对安溢活门动态特性进行数值仿真,仿真结果与试验结果吻合较好,且通过AMESim仿真可以得到与分析系统方程相同的结论.着重研究主副弹簧刚度、主副膜片刚度、主副膜片有效面积、主活阀摩擦阻尼、背压腔容积和泄压间隙等对安溢活门动态特性的影响.(1)相对于主弹簧,副弹簧刚度对系统动态特性影响更大,在保证系统精度的前提下应尽量减小副弹簧刚度,增大主弹簧刚度.(2)主副膜片刚度对系统动态特性影响很大,在保证系统精度前提下应尽量采用刚度大的膜片.(3)膜片有效面积对系统动态特性影响很大,在满足系统精度和稳定性前提下应尽量减小主膜片有效面积,增大副膜片有效面积.(4)主活阀摩擦阻尼适当增加可使波动周期延长,过大的摩擦力则会造成主活阀低压回位延迟现象.(5)泄压间隙及背压腔容积对系统动态特性影响较大,在工程设计时应首先保证其他参数的优化和可靠,在满足精度及稳定性要求的前提下最后对泄压间隙和背压腔容积进行优化设计.安溢活门及其试验系统AMESim仿真模型的建立,为全面了解和系统掌控活门动态特性提供有力工具,为试验故障模式提供定性分析工具,极大地提高对安溢活门动态特性的认识,同时也为结构优化设计提供直接指导.但是,由于该方法固有的局限性,系统动力学模型不能反映结构内部复杂非定常流场对系统动态特性的影响,也不能反映流固耦合作用的影响.国内更急需对阀门系统流固耦合和非定常流动模拟方面的研究,为此有必要结合计算流体动力学以及结构动力学,开展流固耦合数值模拟研究,彻底解决安溢活门动态特性和参数优化问题.参考文献:[1]SORLI M, FIGLIOLINI G, PASTORELLI S. Dynamic model and experimental investigation of a pneumatic proportional pressure valve[J]. IEEE/ASME Trans Mechatronics,2004, 9(1): 7886.[2]SCHALLHORN P A. Forward looking pressure regulator algorithm for improved modeling performance within the generalized fluid system simulation program[C]//40thAIAA/ASME/SAE/ASEE Joint Propulsion Conf & Exhibit, Fort Lauderdale, 2004.[3]YANG AnShik, KUO TienChuan. Design analysis of a satellite hydrazine propulsion system[J]. J Propulsion & Power, 2001, 18(2): 270279.[4]武唯强,王海洲. 恒压加载式冷氦压力调节器的建模与仿真[J].导弹与航天运载技术,2001(6): 2732.[5]张炜,徐志高,黄先祥. 液体推进剂导弹全动力系统稳态故障仿真[J].系统仿真学报,2004, 15(9): 12051209.[6]宋鸿尧,丁忠尧. 液压阀设计与计算[M]. 北京:机械工业出版社, 1982: 10.[7]刘靖东,隋国发,娄路亮. 液体火箭增压输送系统多学科动力学研究[J]. 中国科学: E 辑:技术科学, 2009, 39(3): 474481.[8]LAFOND A. Numerical simulation of the flow field inside a hot gas valve, AIAA 994087[R]. 1999.[9]袁洪滨,张民庆,孙彦堂. 基于AMESim的直动式电磁阀动态仿真研究[J].火箭推进,2011, 37(5): 3035.(编辑于杰)。
弹簧阻尼系统微分方程范文模板及概述说明1. 引言1.1 概述本文旨在探讨弹簧阻尼系统微分方程及其相关特性与参数的影响因素。
弹簧阻尼系统广泛应用于机械工程、建筑结构和其他领域中,对于系统的动力学行为有着重要影响。
因此,深入研究弹簧阻尼系统的微分方程以及其参数的影响对于工程设计和优化具有重要意义。
1.2 文章结构本文共分为五个部分。
首先是引言部分,介绍了文章的背景和目的。
第二部分将详细介绍弹簧阻尼系统微分方程,包括系统简介、微分方程概念解析以及建模方法。
第三部分将探讨主要特性与参数的影响因素,具体涉及阻尼系数、弹性系数和质量对系统行为的影响。
第四部分将进行数值模拟与仿真结果的分析,包括实验设计、数据收集方法、仿真模型构建与参数设置以及数值模拟结果与分析。
最后一部分是结论部分,总结了研究成果,并展望了进一步研究的方向。
1.3 目的本文的目的是探究弹簧阻尼系统微分方程及其相关特性与参数的影响因素。
通过深入研究和分析,旨在揭示弹簧阻尼系统在不同参数设置下的动力学行为,并为工程设计和优化提供参考依据。
通过数值模拟与仿真结果的分析,将验证理论推导与实际计算的一致性,并对系统行为进行进一步解释和讨论。
希望本文的研究成果能够为相关领域的学者和工程师提供有益的参考和启示,促进弹簧阻尼系统在实际应用中发挥更大作用。
2. 弹簧阻尼系统微分方程:2.1 弹簧阻尼系统简介:弹簧阻尼系统是一种常见的机械振动系统,广泛应用于工程实践中。
该系统由一个质点、弹簧和阻尼器组成,质点可以在一个方向上自由运动。
弹簧提供恢复力,而阻尼器则通过消耗能量来减少系统的振荡幅度。
弹簧阻尼系统可以建模为一个二阶线性微分方程。
2.2 微分方程概念解析:微分方程描述了物理量随时间变化的关系。
对于弹簧阻尼系统,其可表示为二阶线性微分方程形式。
设质点位移为y(t),则其满足以下形式的微分方程:m*y''(t) + c*y'(t) + k*y(t) = F(t)其中,m是质量,c是阻尼系数,k是弹性系数,F(t)是外部作用力。
37弹簧质量阻尼器系统建模与频率特性分析在工程中,弹簧质量阻尼器系统是一种常见的机械系统,广泛应用于减震、减振和隔振等方面。
弹簧质量阻尼器系统由弹簧、质量和阻尼器组成,其中弹簧用于提供系统的弹性支撑,质量用于惯性作用,阻尼器用于消散系统的振动能量。
建立弹簧质量阻尼器系统的数学模型并进行频率特性分析对于系统的设计和性能评估至关重要。
1.弹簧质量阻尼器系统建模弹簧质量阻尼器系统可以用简谐振动模型来描述。
假设系统由质量m、弹簧刚度k和阻尼系数c组成,其受到外力F(t)作用。
系统的运动方程可以写成如下形式:m*x''(t)+c*x'(t)+k*x(t)=F(t)其中,x(t)为系统的位移,x'(t)为系统的速度,x''(t)为系统的加速度。
频率特性分析是对弹簧质量阻尼器系统在不同频率下的响应进行研究。
在频率特性分析中,通常会研究系统的振幅-频率曲线和相位-频率曲线。
首先,通过对系统的运动方程进行拉普拉斯变换,可以得到系统的传递函数:H(s) = X(s) / F(s) = 1 / (ms^2 + cs + k)其中,s为复频域变量。
利用传递函数可以计算系统在不同频率下的振幅和相位。
根据传递函数的模和幅角,可以画出系统的振幅-频率曲线和相位-频率曲线。
3.频率特性分析实例假设一个简单的弹簧质量阻尼器系统由质量m=1kg、弹簧刚度k=10N/m、阻尼系数c=1N·s/m组成,外力F(t)为正弦函数。
通过对系统进行频率特性分析,可以得到系统在不同频率下的响应。
对于该系统,可以计算其传递函数为:H(s)=1/(s^2+s+10)通过传递函数可以计算系统在不同频率下的振幅和相位,并绘制出振幅-频率曲线和相位-频率曲线。
通过频率特性分析,可以得到系统的共振频率、共振幅值、相位延迟等重要参数,从而对系统的性能进行评估和优化。
总之,对弹簧质量阻尼器系统进行建模和频率特性分析是非常重要且必要的。
弹簧操动机构动力学仿真及应力分析王坤;刘荣海;杨迎春;郑欣;李亚宁【摘要】高压断路器操动机构的可靠性是断路器稳定运行的重要保证.笔者利用ADAMS软件对机构动触头在分合闸过程中行程、速度等特性进行了动力学仿真分析,通过与实验数据进行对比,验证了所建模型的准确性.通过HyperMesh和LS-DYNA软件对机构进行了有限元建模并求解分析,得到了操动机构关键零部件的应力分布情况,并指出了需注意的危险部位.分析方法和结果可为断路器操动机构的研究和优化设计提供理论指导和参考依据.【期刊名称】《云南电力技术》【年(卷),期】2017(045)003【总页数】7页(P100-105,116)【关键词】高压断路器;操动机构;动力学仿真;ADAMS;应力分析;有限元模型【作者】王坤;刘荣海;杨迎春;郑欣;李亚宁【作者单位】华北电力大学云南电网公司研究生工作站,昆明650217;云南电网有限责任公司电力科学研究院,昆明650217;云南电网有限责任公司电力科学研究院,昆明650217;云南电网有限责任公司电力科学研究院,昆明650217;华北电力大学云南电网公司研究生工作站,昆明650217【正文语种】中文【中图分类】TM561高压断路器是电网系统中的关键设备,用来保护和控制电网中的各类重要元件。
据国家电网以及电力部的调查统计,操动机构是造成断路器故障的主要原因,动作失灵的故障—如拒分、拒合、误动所占的比例为43.8%,近年来,由于断路器操动机构故障导致的电网事故时有发生,严重影响了电网的安全稳定运行,因此提高操动机构的可靠性具有很重要的意义[1]。
高压断路器零部件多,结构复杂,部件之间运动关系多样,采用多体动力学机仿真软件ADAMS和HyperMesh/ LS-DYNA等有限元分析软件,对操动机构分/合闸过程中重要零部件的应力和动特性进行仿真分析,可显著缩短设备设计和生产周期,降低使用物理样机进行试验的高昂成本[2]。
adams动力学仿真原理摘要:1.引言2.Adaams动力学仿真原理简介3.Adaams动力学仿真过程详解4.应用Adams动力学仿真的优势5.结论正文:【引言】在工程领域,动力学仿真技术已成为分析与优化机械系统性能的重要手段。
Adams作为一种广泛应用的动力学仿真软件,可以帮助工程师快速准确地分析复杂机械系统的运动和动力性能。
本文将详细介绍Adams动力学仿真原理及应用过程,以期为工程师们提供实用的指导。
【Adaams动力学仿真原理简介】Adams基于虚拟样机技术,通过建立机械系统的三维模型,利用运动学和动力学方程对系统进行仿真分析。
其核心原理包括以下几点:1.建立机械系统三维模型:用户根据实际需求,在Adams中构建机械系统的各个部件,如机身、支架、电机等。
2.添加约束和驱动:为模拟实际工况,用户需在模型中添加约束(如转动副、滑动副等)以及驱动(如电机、力等)。
3.设定运动学和动力学方程:Adams根据模型自动生成运动学和动力学方程,为后续仿真分析奠定基础。
4.进行仿真计算:根据设定的时间步长和求解器参数,Adams对运动学和动力学方程进行求解,得到各部件的运动轨迹、速度、加速度等数据。
5.后处理与分析:用户可利用Adams提供的后处理工具,对仿真结果进行可视化展示、数据分析等。
【Adaams动力学仿真过程详解】1.建立模型:首先,在Adams中创建一个新的项目,并根据需求添加或修改部件模型。
2.添加约束和驱动:在模型中定义各部件之间的运动关系,如转动副、滑动副等;同时,为需要驱动的部件添加电机、力等驱动。
3.设定材料属性:为各部件设定相应的材料属性,如密度、弹性模量等。
4.网格划分:对模型进行网格划分,以提高仿真精度。
5.设定求解参数:设置时间步长、求解器类型等求解参数。
6.开始仿真:点击“开始仿真”按钮,Adams将自动进行仿真计算。
7.观察仿真结果:在仿真过程中,用户可通过Adams的实时监控功能观察各部件的运动状态。
弹簧阻尼系统动力学模
型a m s仿真
集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
震源车系统动力学模型分析报告一、项目要求
1)独立完成1个应用Adams软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。
分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。
2)上交分析报告和Adams的命令文件,命令文件要求清楚、简洁。
二、建立模型
1)启动admas,新建模型,设置工作环境。
对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(WorkingGrid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成750mm和500mm,间距(Spacing)中的X和Y都设置成50mm。
然后点击“OK”确定。
如图2-1所表示。
图2-1设置工作网格对话框
2)在ADAMS/View零件库中选择矩形图标,参数选择为“onGround”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。
以同样的方法,选择参数“NewPart”建立part-2、part-3、part-4,得到图形如2-3所示,
图2-2图2-3创建模型平台
3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4
图2-4创建弹簧阻尼器
4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
图2-5添加约束
至此模型创建完成
三、模型仿真
1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置EndTime为5.0,StepSize为0.01,Steps为50,点击图标,开始仿真对所得数据进行分析。
选择物块的位移、速度、加速度与时间的图像如图3-1、3-2、3-3所示,经过傅里叶变换之后我们可以清楚地看到系统的各阶固有频率。
图3-1位移与时间图像以及FFT变换图像
图3-2速度与时间图像以及FFT变换图像
图3-3加速度与时间图像以及FFT变换图像
通过傅里叶变换,从图中可以看出系统为三阶系统,表现出三阶的固有频率,通过测量得到w1=2.72,w2=4.29,w3=6.15.。
2)为了更进一步验证系统的各阶固有频率,我们给系统施加一定频率的正弦激振力,使系统做受迫振动,观察系统的振动情况,
(a)F1=50*sin(2*3.14*w1*time)时,物块振动的速度与时间的图像如3-4所示。
图3-4 F1作用下速度与时间图像以及FFT变换图像
在F1的作用下,此时振动的幅值A1=489.6323,由于激振力的频率等于系统一阶固有频率,系统在一阶固有频率处发生共振,与无阻尼状态下自由振动时物块振动速度(3-2)相比较,振动明显加强,
(b)F2=50*sin(2*3.14*w2*time)时,物块振动的速度与时间的图像如3-5所示。
图3-5 F2作用下速度与时间图像以及FFT变换图像
在F2的作用下,此时系统在W2的幅值A2=304.0115,由于激振力的频率等于系统二阶固有频率,系统在二阶固有频率处发生共振,振动明显加强,
(c)F3=50*sin(2*3.14*w3*time)时,物块振动的速度与时间的图像如3-6所示。
图3-6 F3作用下速度与时间图像以及FFT变换图像
在F3的作用下,由于激振力的频率等于系统三阶固有频率,系统在三阶固有频率处发生共振,与自由振动相比较振动明显加强,
(d)F4=50*sin(2*3.14*w3*time)时物块振动的速度与时间的图像如3-7所示
图3-7 F4作用下速度与时间图像以及FFT变换图像
当激振力的频率与系统固有频率相差很远时,系统不会发生共振现象,在系统的各阶固有频率处振动都不会加强。