极点分布与系统稳定性研究
- 格式:pdf
- 大小:85.77 KB
- 文档页数:1
极点对系统性能影响一.控制系统与极点自动控制系统根据控制作用可分为:连续控制系统和采样控制系统,采样系统又叫离散控制系统。
通常把系统中的离散信号是脉冲序列形成的离散系统,称为采样控制系统。
连续控制系统即指控制量为连续的模拟量如时变系统。
系统的数学模型一般由系统传递函数表达。
传递函数为零初始条件下线性系统响应(即输出)量的拉普拉斯变换(或z 变换)与激励(即输入)量的拉普拉斯变换之比。
记作Φ(s )=Xo (s )/Xi (s ),其中Xo (s )、Xi (s )分别为输出量和输入量的拉普拉斯变换。
特征方程的根称为极点。
如试Φ﹙S ﹚= C [∏(S-Pi )/∏(S-Qi) ]中Q1 Q2 Q3 …… Qi ……即为系统的极点。
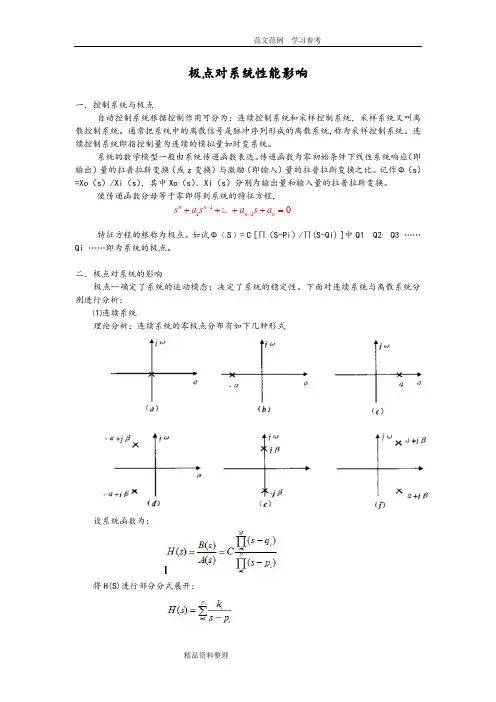
二.极点对系统的影响极点--确定了系统的运动模态;决定了系统的稳定性。
下面对连续系统与离散系统分别进行分析:⑴连续系统理论分析:连续系统的零极点分布有如下几种形式设系统函数为:将H(S)进行部分分式展开:1n a s -+++系统冲激响应H(S)的时域特性h(t)随时间衰减的信号分量完全由系统函数H(S)的极点位置决定。
每一个极点将决定h(t)的一项时间函数。
稳定性:由上述得知Y(S)= C [∏(S-Pi )/(S-Qi) ]可分解为Y(S)=C1/(S-τ1)+ C2/(S-τ2)+ C3/(S-τ3)+……+ Ci/(S-τi)+…… 则时间响应为……由于特征方程的根不止一个,这时,应把系统的运动看成是多个运动分量的合成。
只要有一个运动分量是发散的,则系统是不稳定的。
因此,特征方程所有根的实部都必须是负数,亦即所有的根都在复平面的左半平面。
通过复变函数幅角定理将S 由G 平面映射到GH 平面。
如果封闭曲线 F 内有Z 个F(s)的零点,有P 个F(s)的极点,则s 沿 F 顺时针转一圈时,在F(s)平面上,F(s)曲线绕原点顺时针转的圈数R 为z 和p 之差,即R =z -p 。
摘要现今数字信号处理理论与应用已成为一门很重要的高新科学技术学科,通过功能强大的MATLAB软件与数字信号处理理论知识相互融合在一起,既使我们对数字信号处理的理论知识能够有更加深厚的解也提高了动手能力,实践并初步掌握了MATLAB 的使用。
根据本次课题要求,通过使用MATLAB,方便了对系统函数的繁琐的计算,并且直观形象的用计算机进行模拟仿真,通过观察图,由图像的特征从而进一步的对系统进行形象的分析。
本课题中给出了系统函数,对其稳定性进行分析我们可以通过MATLAB画零极图观察极点的分布,另外还可以通过MATLAB分析系统的单位阶跃响应、单位脉冲响应、幅频相频特性的图形更加具体的对系统进行分析。
关键字:离散系统函数、MATLAB、零极点分布、系统稳定性。
一、设计原理1.设计要求(1):根据系统函数求出系统的零极点分布图并且判断系统的稳定性。
(2):求解系统的单位阶跃响应,并判断系统的稳定性。
(3):求系统的单位脉冲响应,并判断系统的稳定性(4):求出各系统频率响应,画出幅频特性和相频特性图(zp2tf,zplane,impz等)2、系统稳定性、特性分析进行系统分析时我主要利用MATLAB软件绘制出系统零极点的分布图、单位脉冲响应图、单位阶跃响应图等。
采用MATLAB 软件进行设计时我调用了软件本身的一些函数来对课题进行绘图和分析。
诸如zplane、impz、stepz、freqz等。
对系统函数的零极图而言:极点在单位圆内,则该系统稳定,极点在单位圆外,则该系统为非稳定系统。
当极点处于单位圆内,系统的冲激响应曲线随着频率的增大而收敛;当极点处于单位圆上,系统的冲激响应曲线为等幅振荡;当极点处于单位圆外,系统的冲激响应曲线随着频率的增大而发散。
系统的单位阶跃响应若为有界的则系统为稳定系统。
由以上的判据配合图形对系统的稳定性进行分析,达到我们的课程要求。
系统函数H(z)的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
实验二:系统稳定性和稳态性能分析主要内容:自动控制系统稳定性和稳态性能分析上机实验目的与要求:熟悉 MATLAB 软件对系统稳定性分析的基本命令语句 熟悉 MATLAB 软件对系统误差分析的 Simuink 仿真 通过编程或 Simuink 仿真完成系统稳定性和稳态性能分析一 实验目的1、研究高阶系统的稳定性,验证稳定判据的正确性;2、了解系统增益变化对系统稳定性的影响;3、观察系统结构和稳态误差之间的关系。
二 实验任务1、稳定性分析欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB 中的tf2zp 函数求出系统的零极点,或者利用root 函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
(1)已知单位负反馈控制系统的开环传递函数为0.2( 2.5)()(0.5)(0.7)(3)s G s s s s s +=+++,用 MA TLAB 编写程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。
(2)已知单位负反馈控制系统的开环传递函数为( 2.5)()(0.5)(0.7)(3)k s G s s s s s +=+++,当取k =1,10,100用MA TLAB 编写程序来判断闭环系统的稳定性。
只要将(1)代码中的k 值变为1,10,100,即可得到系统的闭环极点,从而判断系统的稳定性,并讨论系统增益k 变化对系统稳定性的影响。
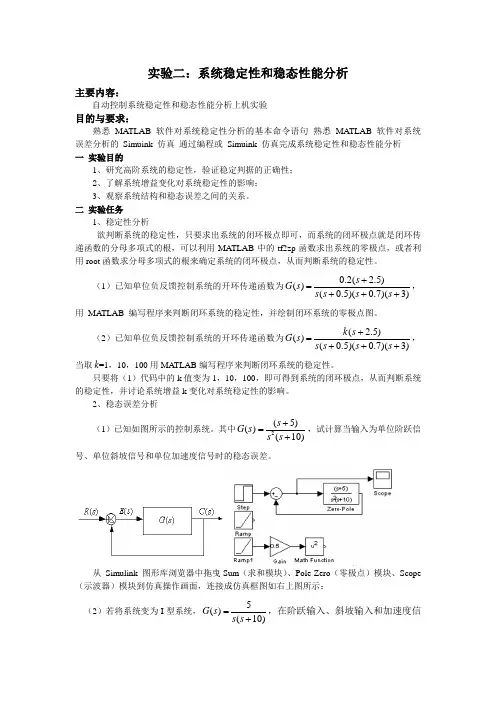
2、稳态误差分析(1)已知如图所示的控制系统。
其中2(5)()(10)s G s s s +=+,试计算当输入为单位阶跃信号、单位斜坡信号和单位加速度信号时的稳态误差。
从 Simulink 图形库浏览器中拖曳Sum (求和模块)、Pole-Zero (零极点)模块、Scope (示波器)模块到仿真操作画面,连接成仿真框图如右上图所示:(2)若将系统变为I 型系统,5()(10)G s s s =+,在阶跃输入、斜坡输入和加速度信号输入作用下,通过仿真来分析系统的稳态误差。
Matlab中的稳定性分析与控制设计方法简介:Matlab是一种功能强大的数值计算和科学编程平台,被广泛应用于控制系统设计和分析领域。
本文将介绍Matlab中的稳定性分析和控制设计方法,探讨如何利用Matlab进行系统稳定性分析、控制器设计和性能优化。
一、系统稳定性分析1. 稳定性概念稳定性是控制系统设计中一个重要的指标,指系统在一定输入下是否趋向于稳定的状态。
在Matlab中,我们可以使用稳定性分析工具箱来分析系统的稳定性。
该工具箱提供了多种稳定性判据和计算方法,如时间响应法、频率响应法和根轨迹法等。
2. 时间响应法时间响应法是一种使用系统的输入信号与输出响应之间的时域关系来分析系统稳定性的方法。
在Matlab中,我们可以使用step()函数来绘制系统的阶跃响应图,并通过观察图形来判断系统是否稳定。
此外,还可以使用impulse()函数来绘制系统的冲击响应图,以进一步验证系统的稳定性。
3. 频率响应法频率响应法是一种使用系统的输入信号与输出响应之间的频域关系来分析系统稳定性的方法。
在Matlab中,我们可以使用bode()函数来绘制系统的频率响应图,该图显示了系统在不同频率下的增益和相位特性。
通过分析频率响应图,我们可以判断系统是否存在频率特性上的不稳定性。
4. 根轨迹法根轨迹法是一种使用系统的传递函数的零点和极点分布来分析系统稳定性的方法。
在Matlab中,我们可以使用rlocus()函数来绘制系统的根轨迹图,该图显示了系统的极点随控制参数变化时的轨迹。
通过分析根轨迹图,我们可以确定系统的稳定边界和稳定性。
二、控制器设计方法1. PID控制器PID控制器是一种常用的控制器设计方法,可以实现对系统的稳定性和性能进行调节。
在Matlab中,我们可以使用pidtool()函数来设计PID控制器。
该工具提供了可视化界面,可以通过调整参数来优化控制器的性能。
同时,Matlab还提供了pid()函数和tf()函数等用于创建PID控制器和传递函数模型的函数。
IT 大视野Digital Space P .45浅谈线性系统稳定性的判断张涛 贵阳学院电子与通信工程学院摘要:系统的稳定性是我们设计系统时必学考虑的一项重要技术指标,在绝大多数情况下,我们都希望我们设计的系统是稳定的,线性系统又是最简单也是最重要的系统,我们学习系统分析和设计都是从线性系统开始的,所以学会和掌握判断线性系统的稳定性尤为重要,本文探讨如何判断一个系统是否为稳定,并结合MATLAB 软件仿真来使读者对稳定性判断依据有一个直观认识。
关键词:线性系统 稳定性 判断系统稳定性是我们分析和设计系统时必须考虑的问题,可以说我们设计的所有的系统都离不开稳定性这一技术。
那么怎么判断一个系统是否稳定呢,下面我们来看看稳定性的判断依据,通过举例探讨如何利用这些依据来判断系统是否稳定。
1系统稳定性的判断依据连续时间系统稳定性的充要条件是①离散时间系统稳定性的充要条件是②其中:,分别代表连续时间系统和离散时间系统的冲激响应。
上面两个判断公式要做积分或求和,比较麻烦。
对于线性时不变因果系统还可根据系统函数的极点分布情况进行判断,这样避免了复杂的计算。
对于连续时间系统的系统函数 的极点都在s 平面的左半平面,则系统稳定。
离散时间系统 的全部极点在单位圆内时,系统稳定。
2 举例说明如何判断一个系统是稳定系统下面结合一些具体例子来探讨如何判断一个系统是稳定系统。
例1已知一因果的线性时不变系统的冲激响应为,判断系统是否稳定? 由于,当时,系统稳定;当时,系统不稳定。
例2已知平均滑动系统的冲激响应为判断该系统是否稳定?,所以系统稳定。
这两个例子都是利用时域范围内的判断方法,下面我们结合MATLAB 运用变换域的方法,即通过系统函数极点所处的位置来判断系统的稳定性。
例2已知系统函数为,判断该系统是否稳定?利用MATLAB 计算出系统函数的极点为poles = -1 -0.5 + 0.86603i -0.5 - 0.86603i 三个极点均在s 平面的左半平面,说明系统稳定。
实验一 离散系统稳定性分析实验学时:2 实验类型:常规 实验要求:必作一、实验目的:(1)掌握利用MATLAB 绘制系统零极点图的方法; (2)掌握离散时间系统的零极点分析方法;(3)掌握用MATALB 实现离散系统频率特性分析的方法; (4)掌握逆Z 变换概念及MATLAB 实现方法; (5)掌握用MATLAB 分析离散系统稳定性。
二、实验原理:1、离散系统零极点图及零极点分析;线性时不变离散系统可用线性常系数差分方程描述,即()()NMiji j a y n i b x n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (8-2) 将式(8-2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (8-3)其中C 为常数,(1,2,,)j q j M =为()H z 的M 个零点,(1,2,,)i p i N =为()H z 的N个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性;离散系统的频率特性; 1.1、零极点图的绘制设离散系统的系统函数为则系统的零极点可用MA TLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MA TLAB 命令为为: A=[1 3/4 1/8];P=roots(A) 运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
【关键字】实验实验七连续时间系统S域零极点分析一、目的(1)掌握连续系统零极点分布与系统稳定性关系(2)掌握零极点分布与系统冲激响应时域特性之间的关系(3)掌握利用MATLAB进行S域分析的方法二、零极点分布与系统稳定性根据系统函数的零极点分布来分析连续系统的稳定性是零极点分析的重要应用之一。
稳定性是系统固有的性质,与激励信号无关,由于系统函数包含了系统的所有固有特性,显然它也能反映出系统是否稳定。
对任意有界信号,若系统产生的零状态响应也是有界的,则称该系统为稳定系统,否则,则称为不稳定系统。
上述稳定性的定义可以等效为下列条件:●时域条件:连续系统稳定充要条件为,即冲激响应绝对可积;●复频域条件:连续系统稳定的充要条件为系统函数的所有极点位于S平面的左半平面。
系统稳定的时域条件和频域条件是等价的。
因此,只要考察系统函数的极点分布,就可判断系统的稳定性。
对于三阶以下的低阶系统,可以利用求根公式方便地求出极点位置,从而判断系统稳定性,但对于告阶系统,手工求解极点位置则显得非常困难。
这时可利用MATLAB来实现这一过程。
例7-1:已知某连续系统的系统函数为:试用MATLAB求出该系统的零极点,画出零极点图,并判断系统是否稳定。
解:调用实验六介绍的绘制连续系统零极点图函数sjdt即可解决此问题,对应的MATLAB命令为:a=[8 2 3 1 5];b=[1 3 2];[p,q]=sjdt(a,b)运行结果为:p =-0.6155 - 0.6674i -0.6155 + 0.6674i 0.4905 - 0.7196i 0.4905 + 0.7196iq =-2 -1绘制的零极点图如图7-1所示。
由程序运行结果可以看出,该系统在S平面的右半平面有一对共轭极点,故该系统是一个不稳定系统。
三、零极点分布与系统冲激响应时域特性设连续系统的系统函数为,冲激响应为,则显然,必然包含了的本质特性。
对于集中参数的LTI连续系统,其系统函数可表示为关于s的两个多项式之比,即(7-1)其中为的M个零点,为的N个极点。
信号与系统实验报告——连续时间系统的复频域分析班级:05911101学号:**********姓名:***实验五连续时间系统的复频域分析——1120111487 信息工程(实验班)蒋志科一、实验目的①掌握拉普拉斯变换及其反变换的定义,并掌握MA TLAB 实现方法 ②学习和掌握连续时间系统系统函数的定义及其复频域分析方法③掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。
二、实验原理与方法 1、拉普拉斯变换连续时间信号x(t)的拉普拉斯变换定义为:X s =x (t )e −st dt +∞−∞拉普拉斯反变换为:x t =12πj X (s )e st ds σ+j ∞σ−j ∞在MA TLAB 中可以采用符号数学工具箱中的laplace 函数和ilaplace 函数进行拉氏变换和拉氏反变换。
L=laplace(F)符号表达式F 的拉氏变换,F 中时间变量为t ,返回变量为s 的结果表达式。
L=laplace(F,t)用t 替换结果中的变量s 。
F=ilaplace(L)以s 为变量的符号表达式L 的拉氏反变换,返回时间变量t 的结果表达式。
F=ilaplace(L,x)用x 替换结果中的变量t 。
2、连续时间系统的系统函数连续时间系统的系统函数是系统单位冲激响应的拉氏变换H s =ℎ(t )e −st dt +∞−∞此外,连续时间系统的系统函数还可以由系统输入和输出信号的拉氏变换之比得到H s =Y(s)/X(s) 单位冲激响应h(t)反映了系统的固有性质,而H(s)从复频域反映了系统的固有性质。
对于H(s)描述的连续时间系统,其系统函数s 的有理函数H s =b M s M +b M−1s M−1+⋯+b 0a n s n +a n −1s M−1+⋯+a 03、连续时间系统的零极点分析系统的零点指使式H s 的分子多项式为零的点,极点指使分母多项式为零的点,零点使系统的值为零,极点使系统函数的值无穷大。
三阶系统的分析与校正引言三阶系统是一种常见的动态系统模型,广泛应用于控制系统、电路和信号处理等领域。
在三阶系统的分析和校正过程中,我们需要了解系统的特性、稳定性和动态响应,并结合校正方法进行系统优化。
一、三阶系统特性分析三阶系统由三个一阶子系统相连而成,其传递函数一般表示为:G(s)=(K*(s+z1)*(s+z2))/((s+p1)*(s+p2)*(s+p3))1. 特性根(Characteristic Roots):三阶系统共有三个特性根,分别对应传递函数中的(s + p1)、(s + p2)和(s + p3)项。
特性根的位置和实部决定了系统的稳定性和动态响应,虚部决定了系统的振荡频率。
2. 分布根(Distribution Roots):分布根是系统传递函数分子项(s + z1)和(s + z2)的根,它们决定了系统的增益和阻尼比。
增益越大,系统对输入的变化越敏感;阻尼比越小,系统越容易产生振荡。
3. 极点(Poles)和零点(Zeros):系统传递函数的极点和零点是系统特性的重要指标,极点的位置和数量决定了系统的阻尼性能和稳定性,零点的位置和数量决定了系统的频率响应和相位特性。
二、三阶系统的稳定性分析判断三阶系统的稳定性可以通过判别系统的特性根的实部是否小于零,即特性根是否在左半平面。
1.极点分布:特性根的位置通过求解传递函数分母的特征方程来确定。
将特征方程中的系数代入矩阵当中,可以使用特征值计算软件来求解特征方程,得到特性根的位置和数量。
如果所有特性根的实部小于零,则系统是稳定的。
2.极点分布与稳定性的关系:三阶系统特性根的位置与稳定性之间存在一一对应的关系,通过特性根的位置可以判断系统的稳定性。
具体关系如下:-全部特性根的实部小于零:系统是稳定的。
-有一个特性根的实部大于零:系统是不稳定的。
-有两个特性根的实部大于零:系统是振荡的。
-有两个特性根的实部小于零,另一个特性根的实部等于零:系统是边界稳定的。
傅里叶变换的零极点傅里叶变换的零极点【前言】在信号处理和数学领域,傅里叶变换是一种重要的工具。
通过傅里叶变换,我们可以将一个时域信号转换为频域信号,从而更好地理解信号的特性和频谱分布。
然而,在深入研究傅里叶变换过程中,我们会遇到一个重要的概念——零极点。
零极点在傅里叶变换中起着关键作用,帮助我们理解信号的频率响应以及系统的稳定性。
本文将从简单到复杂的角度,探讨傅里叶变换的零极点,以帮助读者更深入地理解这一概念。
【一、什么是零极点】在傅里叶变换中,我们经常会遇到有理多项式的形式,例如:H(z) = (z - z1)(z - z2)...(z - zn)/(p1 - z)(p2 - z)...(pm - z)其中,z1, z2,..., zn为多项式的零点,p1, p2,..., pm为多项式的极点。
在复平面上,零点表示系统的频率响应为零的位置,而极点表示系统的频率响应无穷大的位置。
【二、零极点与频率响应】通过傅里叶变换的零极点分析,我们可以了解信号或系统的频率响应特性。
具体来说,零点和极点决定了系统的频域特性和稳定性,从而决定了信号在不同频率下的衰减或增强程度。
1. 零点与频率响应当系统的传递函数H(z)中存在一个零点z0时,系统的频率响应在该频率附近会拥有一个极大值。
也就是说,在这个频率下,信号会被增强。
相反地,如果零点为负数,系统的频率响应将在该频率下降到零。
零点可以决定信号的频域特性,进而影响信号的传输和处理。
2. 极点与系统稳定性极点的位置对于系统的稳定性至关重要。
如果极点位于单位圆内,系统将是稳定的。
这意味着,系统对于输入信号的响应将是有界且有限的,不会出现不稳定行为。
相反地,如果极点位于单位圆外,系统将是不稳定的,可能会出现振荡或发散行为。
通过观察极点的位置,我们可以判断系统的稳定性,从而提前预测系统的行为。
【三、零极点分布与系统特性】在实际情况下,零极点的分布对于系统的特性以及频率响应有着重要的影响。