单片机串行口编程
- 格式:doc
- 大小:38.00 KB
- 文档页数:6
单片机原理及应用第6章80C51单片机的串行口80C51单片机是一种基于哈佛架构的8位单片机,具有强大的串行口功能。
串行口是一种通信接口,可以通过单根线传输数据。
本章将介绍80C51单片机的串行口原理及其应用。
一、80C51单片机的串行口原理80C51单片机的串行口包含两个寄存器,分别是SBUF(串行缓冲器)和SCON(串行控制寄存器)。
SBUF寄存器用来存储待发送或接收到的数据,SCON寄存器用来配置和控制串行口的工作模式。
80C51单片机的串行口有两种工作模式:串行异步通信模式和串行同步通信模式。
1.串行异步通信模式串行异步通信是指通信双方的时钟频率不同步,通信的数据按照字符为单位进行传输,字符之间有起始位、数据位、校验位和停止位组成。
80C51单片机的串行口支持标准的RS-232通信协议和非标准通信协议。
在串行异步通信模式下,SCON寄存器需要配置为相应的工作模式。
首先,需要选择串行口的工作模式。
80C51单片机支持第9位,即扩展模式,可以用来检测通信错误。
其次,需要设置波特率。
波特率是指数据每秒传输的位数,用波特率发生器(Baud Rate Generator,BRGR)来控制。
然后,需要设置起始位、数据位和停止位的配置,包括数据长度(5位、6位、7位或8位)、停止位的个数(1位或2位)。
在发送数据时,将待发送的数据通过MOV指令传送到SBUF寄存器,单片机会自动将数据发送出去。
在接收数据时,需要检测RI(接收中断)标志位,如果RI为1,表示接收到数据,可以通过MOV指令将接收到的数据读取到用户定义的变量中。
2.串行同步通信模式串行同步通信是指通信双方的时钟频率同步,在数据传输时需要时钟信号同步。
80C51单片机的串行同步通信支持SPI(串行外设接口)和I2C(串行总线接口)两种协议。
在串行同步通信模式下,SCON寄存器需要配置为相应的工作模式。
首先,需要选择串行口的工作模式。
80C51单片机支持主从模式,可以作为主设备发送数据,也可以作为从设备接收数据。
使用Keil软件模拟调试单片机串行口单片机串行口是单片机中很常见的接口之一,常用于与外界通讯,如与PC机通讯,接收或发送数据等。
Keil软件可以帮助我们模拟及调试单片机串行口,下面是详细介绍。
一、Keil软件简介Keil是一款强大的单片机编程软件,具有模拟器和仿真器。
其可支持多种嵌入式系统和多种编译器。
同时Keil具有标准C 编译器,专门用于单片机编程,而且具有与某些模拟器和编译器的集成,可提供完整的嵌入式开发环境。
二、使用Keil软件模拟1. 连接软件与硬件在开始模拟之前,需要将单片机与电脑通过串口连接好。
打开“Options for Target”对话框,选择“Debug”选项卡,选择正确的COM 端口,设置存根速度,完成调试设置。
2. 添加串行口文件在Keil软件中打开设计文件,键入“#include <reg52.h>”来添加注册头文件,其中包含了需要使用串口的相关寄存器位。
利用如下代码,可以对串行口的各项参数进行设置,例如波特率、校验位等等。
void init(){SCON = 0X50; //使串口工作在方式1,即8位数据,可变波特率TMOD |= 0X20; //TMOD的高4位设为0010,使Timer1工作在方式2TH1 = 0XF3; //波特率设为2400bpsTL1 = 0XF3;TR1 = 1; //启动Timer1ES = 1; //开启串口中断EA = 1; //打开总中断}3. 编写数据收发代码在调用串口的过程中,我们往往需要使用到接收和发送两个函数。
在接收方面,我们需要设置好接收中断模式以及缓冲区的异步处理。
编写简单的数据接收收发代码如下:void send_data(unsigned char dat){SBUF = sdat; //将数据传输到SBUF当中while(!TI); //等待发送完成TI = 0; //完成发送}unsigned char receive_data(){while(!RI); //等待接收完成RI = 0; // 完成接收return SBUF; // 返回接收缓冲区}4. 最后进行模拟完成串行口配置和数据处理之后,就可以开始模拟调试了。

单片机串口烧写原理单片机串口烧写原理单片机串口烧写是一种常见的单片机编程方式。
通过串口烧写,可以将编写好的程序上传到单片机中,从而实现单片机的控制、操作以及数据处理等功能。
下面,我们将介绍单片机串口烧写的原理和基本步骤。
1. 原理单片机串口烧写的原理基于串口通信的原理。
串口通信是使用串行通信协议在计算机和外部设备之间传输数据的一种方式。
在单片机串口烧写过程中,计算机通过串口发送程序数据,单片机接收并保存,最终实现程序上传。
2. 步骤单片机串口烧写的基本步骤如下:步骤一:准备单片机开发板和USB转TTL模块首先,需要准备一块单片机开发板和一块USB转TTL模块。
单片机开发板可选择通用的51单片机或STM32等单片机模块,USB转TTL模块则用于将计算机的USB端口转换为串口通信,从而实现与单片机的通信。
步骤二:将USB转TTL模块连接到计算机将USB转TTL模块与计算机连接,将计算机的USB端口转换为串口通信的通道。
此时,需要注意串口转换模块的正确连接方式和波特率设置。
步骤三:将USB转TTL模块连接至单片机开发板将USB转TTL模块的TXD信号线与单片机开发板的RXD信号线相连接,将USB转TTL模块的RXD信号线与单片机开发板的TXD信号线相连接。
步骤四:下载并打开串口烧写工具软件根据单片机型号下载适配的串口烧写工具软件,将其安装并打开。
此时需要设置正确的串口号,波特率等通信参数。
步骤五:选择要烧写的程序在串口烧写工具软件中选择要烧写的程序,通常为.hex或.bin格式的文件。
步骤六:开始烧写程序点击串口烧写工具软件上的“开始”按钮,开始烧写程序。
此时,串口烧写工具软件将发送程序数据到单片机开发板,一旦单片机接收完全,烧写过程即完成。
总结:单片机串口烧写是一种常见的单片机编程方式,基于串口通信原理。
其步骤包括准备单片机开发板和USB转TTL模块、将USB转TTL模块连接到计算机、将USB转TTL模块连接至单片机开发板、下载并打开串口烧写工具软件、选择要烧写的程序、开始烧写程序。

单片机串行口接收和发送数据的过程简述
串行口接收和发送数据的过程简述
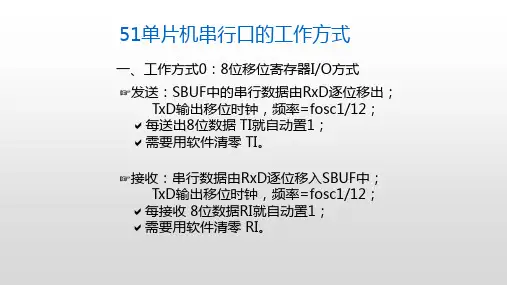
答:在发送过程中,当执行一条将数据写入发送缓冲器SBUF(99H)的指令时,串行口把SBUF中8位数据以fosc/l2的波特率从RXD(P3.0)端输出,发送完毕置中断标志TI=1。
写SBUF指令在S6P1处产生一个正脉冲,在下一个机器周期的S6P2处,数据的最低位输出到RXD(P3.0)脚上;再在下一个机器周期的S3、S4和S5输出移位时钟为低电平时,在S6及下一个机器周期的Sl和S2为高电平,就这样将8位数据由低位至高位一位一位顺序通过RXD线输出。
并在TXD脚上输出fosc/12的移位时钟。
在写SBUF有效后的第10个机器周期的SlPl将发送中断标志TI置位。
接收时,用软件置REN=1(同时,RI=0),即开始接收。
当使SCON中的REN=1(RI=0)时,产生一个正的脉冲,在下一个机器周期的S3P1~S5P2,从TXD(P3.1)脚上输出低电平的移位时钟,在此机器周期的S5P2对P3.0脚采样.并在本机器周期的S6P2通过串行口内的输入移位寄存器将采样值移位接收。
在同一个机器周期的S6P1到下一个机器周期的S2P2,输出移位时钟为高电平。
于是,将数据字节从低位至高位接收下来并装入SBUF。
在启动接收过程(即写SCON,清RI位),将SCON中的RI清0之后的第l0个机器周期的SlPl将RI置位。
这一帧数据接收完毕,可进行下一帧接收。

PIC单片机串口通讯程序单片机串口通讯是一个常用的程序模块。
PIC单片机是一款常用的单片机。
在网上搜索到一个PIC单片机串口通讯程序。
这个PIC单片机串口通讯程序站长没有验证,应该是正确的。
假如大家有更好的PIC单片机串口通讯程序,请向我推荐。
1. 单片机PIC1编程(发送部分)LIST P=16F877#INCLUDE P16F876.INCCBLOCK 0X24 ;保留三个字节作为显示用COUNT ;作计数器或暂存器用ENDCORG 0X0000 ;程序复位入口NOPSTART GOTO MAINORG 0X20MAIN MOVLW 0X30 ;以下将RAM内容初始化MOVWF FSR ;从30H单元开始MOVLW 0X30 ;将值30H赋给单元30HMOVWF COUNTINTRAM MOVF COUNT,0 ;将30H~7FH赋给单元30H~7FHMOVWF INDFINCF COUNT,1INCF FSR,1BTFSS COUNT,7GOTO INTRAMBSF STATUS,RP0 ;将SCI部件初始化MOVLW 0X19 ;将传输的波特率设为约9600 bpsMOVWF SPBRGMOVLW 0X04 ;选择异步高速方式传输8位数据MOVWF TXSTABCF STATUS,RP0MOVLW 0X80 ;允许同步串行口工作MOVWF RCSTABSF STATUS,RP0BSF TRISC,7 ;将RC6、RC7设置为输入方式,断绝与外接电路的连接BSF TRISC,6BCF STATUS,RP0MOVLW 0X30 ;30H作为同步字符发送MOVWF FSRMOVF INDF,0MOVWF TXREG ;将待发送的数据写入发送缓冲器TXREGBSF STATUS,RP0BSF TXSTA,TXEN ;发送允许BCF STATUS,RP0BSF RCSTA,CREN ;接收数据允许LOOPTX BTFSS PIR1,RCIF ;等待PIC2的响应字节GOTO LOOPTXMOVF RCREG,0 ;读响应字节,清RCIFLOOPTX1 BTFSS PIR1,TXIF ;发送下一字节GOTO LOOPTX1INCF FSRMOVF INDF,0MOVWF TXREGBTFSS FSR,7 ;30H~7FH单元的内容是否发送完?GOTO LOOPTX ;没有,继续下一字节的发送BSF STATUS,RP0 ;如果是,则停止发送BCF TXSTA,TXENBCF STATUS,RP0 ;数据发送完毕CALL LED ;调用显示子程序,将发送的数据显示出来END ;程序完2. 单片机PIC2编程(接收部分)LIST P=16F876#INCLUDE P16F876.INCCBLOCK 0X24COUNTENDCORG 0X0000NOPSTART GOTO MAINMAIN BSF STATUS,RP0 ;初始化程序同发送子程序MOVLW 0X19 ;波特率设置与PIC1相同MOVWF SPBRGMOVLW 0X04 ;异步高速传输MOVWF TXSTABCF STATUS,RP0MOVLW 0X80 ;串行口工作使能MOVWF RCSTABSF STATUS,RP0BSF TRISC,7 ;与外接电路隔离BSF TRISC,6BCF STATUS,RP0MOVLW 0X30 ;从30H单元开始存放发送来的数据MOVWF FSRBSF RCSTA,CREN ;接收允许BSF STATUS,RP0BSF TXSTA,TXEN ;发送允许BCF STATUS,RP0WAIT BTFSS PIR1,RCIF ;等待接收数据GOTO WAITMOVF RCREG,0 ;读取数据MOVWF INDF ;将接收到的响应字节存入PIC2的RAM INCF FSRMOVWF TXREG ;发送响应字节LOOPTX BTFSS PIR1,TXIF ;等待写入完成GOTO LOOPTXBTFSS FSR,7 ;全部数据接收否?GOTO WAIT1 ;没有,继续接收其它数据BCF RCSTA,RCEN ;接收完,则关断接收和发送数据允许BSF STATUS,RP0BCF PIE1,TXENBCF STATUS,RP0CALL LED ;调用显示子程序,将接受到的数据显示出来END ;程序完PIC单片机双机同步通信1. 单片机PIC1编程(主控发送)LIST P=16F876#INCLUDE P16F876.INCCBLOCK 0X24 ;保留三个字节作为显示用COUNT ;作计数器或暂存器用ENDCORG 0X0000 ;程序复位入口NOPSTART GOTO MAINORG 0X0100MAIN MOVLW 0X30MOVWF FSR ;以下将从30H单元开始的RAM内容初始化MOVLW 0X30 ;将值30H赋给单元30HMOVWF COUNTINTRAM MOVF COUNT,0 ;将30H~7FH赋给单元30H~7FH MOVWF INDFINCF COUNT,1INCF FSR,1BTFSS COUNT,7GOTO INTRAMBSF STATUS,RP0 ;将SCI部件初始化MOVLW 0X19 ;将传输的波特率设为约9600 bpsMOVWF SPBRGMOVLW 0X94 ;选择同步高速方式传输8位数据MOVWF TXSTABCF STATUS,RP0MOVLW 0X80 ;允许同步串行口工作MOVWF RCSTABSF STATUS,RP0BSF TRISC,7 ;将RC6、RC7设置为输入方式,断绝与外接电路的连接BSF TRISC,6BSF STATUS,RP0MOVLW 0X30 ;将从30H单元开始的内容传送到PIC2MOVWF FSRMOVF INDF,0MOVWF TXREG ;将待发送的数据写入发送缓冲器TXREGBSF STATUS,RP0BSF TXSTA,TXEN ;发送允许BCF STATUS,RP0TX1 BTFSS PIR1,TXIF ;等待上一个数据写完GOTO TX1INCF FSR ;准备发送下一个数据MOVF INDF,0MOVWF TXREG ;将新的数据写入TXREGBTFSS FSR,7 ;判断所有30H~7FH单元的内容是否发送完毕?GOTO TX1 ;没有,则继续发送其它字节TX2 BTFSS PIR1,TXIF ;等所有要求发送的数据已经发送完,再额外GOTO TX2 ;写一个字节到TXREG,使最后一个数据能够顺利发送MOVWF TXREGNOP ;延时几个微秒后,关发送允许NOPNOPNOPNOPBSF STATUS,RP0BCF TXSTA,TXENBCF STATUS,RP0CALL LED ;调用显示子程序,将发送的数据显示出来END ;程序完2. 单片机PIC2编程(从动接收)LIST P=16F876#INCLUDE P16F876.INCCBLOCK 0X24COUNTENDCORG 0X0000NOPSTART GOTO MAINORG 0X0100MAIN BSF STATUS,RP0MOVLW 0X10 ;选择同步从动方式MOVWF TXSTABCF STATUS,RP0MOVLW 0X80 ;串行口使能MOVWF RCSTABSF STATUS,RP0BSF TRISC,7 ;关断与外部电路的联系BSF TRISC,6BCF STATUS,RP0MOVLW 0X30 ;从30H单元开始存放接收的数据MOVWF FSRBSF RCSTA,CREN ;接收允许WAIT BTFSS PIR1,RCIF ;等待接收GOTO WAITMOVF RCREG,0 ;读取接收到的数据MOVWF INDF ;将接收到的数据存入PIC2的RAMINCF FSRBTFSS FSR,7 ;所有的数据是否已接收完?GOTO WAIT ;没有,继续接收其它字节NOP ;延时数微秒后,清接收允许位NOPNOPNOPBCF RCSTA,RCENCALL LED ;调用显示子程序,将接受到的数据显示出来END ;程序完PIC单片机与PC机通过串口通信1. PC机编程PC采用Toubr C 进行编写。
51单片机串行口中断服务程序单片机串行口中断服务程序是指在单片机进行串行通信时,当接收到数据时会触发中断,然后执行相应的中断服务程序。
下面是一个示例的单片机串行口中断服务程序,共计1200字以上。
#include <reg51.h> // 引入reg51.h头文件//定义串行口中断标志sbit RI_FLAG = P3^0; // 数据接收中断标志sbit TI_FLAG = P3^1; // 数据发送中断标志//定义串行口接收数据缓冲区unsigned char receiveBuffer[10];unsigned char receiveCount = 0;//定义串行口发送数据缓冲区unsigned char sendBuffer[10];unsigned char sendCount = 0;//串行口中断服务函数void serialInterrupt( interrupt 4if(RI_FLAG) // 判断是否是数据接收中断receiveBuffer[receiveCount] = SBUF; // 读取串行口接收数据receiveCount++; // 接收计数加1RI_FLAG=0;//清除中断标志位}if(TI_FLAG) // 判断是否是数据发送中断if(sendCount < 10) // 判断是否还有数据需要发送SBUF = sendBuffer[sendCount]; // 发送串行口数据sendCount++; // 发送计数加1}elsesendCount = 0; // 重置发送计数TI_FLAG=0;//清除中断标志位}}//主函数void mainES=1;//允许串行口中断TMOD=0x20;//设置定时器1为模式2,串行口使用定时器1 TH1=0xFD;//设置波特率为9600,定时器初值为0xFDTL1=0xFD;//定时器初值为0xFDSCON=0x50;//设置串行口工作在方式1,允许接收TR1=1;//启动定时器1while(1)//主程序逻辑//将数据存入发送缓冲区sendBuffer[0] = 'H';sendBuffer[1] = 'e';sendBuffer[2] = 'l';sendBuffer[3] = 'l';sendBuffer[4] = 'o';sendBuffer[5] = '\r'; // 发送回车符sendBuffer[6] = '\n'; // 发送换行符while(sendCount != 0) //等待数据发送完毕//主程序逻辑}}。
单片机串行口实验报告实验总结一、实验目的本实验旨在让学生了解单片机串行口的基本原理和应用,掌握单片机串行口的编程方法,培养学生动手实践和解决问题的能力。
二、实验器材1. STC89C52单片机开发板2. 电脑串口线3. 电脑终端仿真软件Tera Term三、实验原理串行口是单片机与外部设备进行通信的重要接口之一。
串行口通信是指将数据一个位一个地传输,每个数据位之间有一个时钟脉冲来同步传输。
常见的串行通信协议有RS232、RS485、SPI等。
本实验主要涉及到RS232协议。
四、实验内容1. 实现单片机向电脑发送数据并显示。
2. 实现电脑向单片机发送数据并控制LED灯闪烁。
五、实验步骤1. 连接STC89C52单片机开发板和电脑,使用Tera Term打开串口终端。
2. 编写程序,设置单片机的串行口通信参数(波特率、数据位数、停止位数等),并利用SendData函数向电脑发送数据。
3. 在Tera Term中设置相应的串口参数,并打开“local echo”选项,以便观察单片机发送的数据。
4. 编写程序,接收电脑发送的数据,并根据接收到的数据控制LED灯闪烁。
5. 在Tera Term中输入相应的命令,向单片机发送数据,观察LED灯的闪烁情况。
六、实验结果1. 实现了单片机向电脑发送数据并显示。
2. 实现了电脑向单片机发送数据并控制LED灯闪烁。
七、实验总结本实验使我对串行口通信有了更深入的理解,掌握了单片机串行口编程方法。
同时也锻炼了我的动手能力和解决问题的能力。
在实验过程中还需要注意串口参数设置和通信协议选择等问题,加深了我对这些知识点的理解。
MCS-51单⽚机的串⾏⼝及串⾏通信技术数据通信的基本概念串⾏通信有单⼯通信、半双⼯通信和全双⼯通信3种⽅式。
单⼯通信:数据只能单⽅向地从⼀端向另⼀端传送。
例如,⽬前的有线电视节⽬,只能单⽅向传送。
半双⼯通信:数据可以双向传送,但任⼀时刻只能向⼀个⽅向传送。
也就是说,半双⼯通信可以分时双向传送数据。
例如,⽬前的某些对讲机,任⼀时刻只能⼀⽅讲,另⼀⽅听。
全双⼯通信:数据可同时向两个⽅向传送。
全双⼯通信效率最⾼,适⽤于计算机之间的通信。
此外,通信双⽅要正确地进⾏数据传输,需要解决何时开始传输,何时结束传输,以及数据传输速率等问题,即解决数据同步问题。
实现数据同步,通常有两种⽅式,⼀种是异步通信,另⼀种是同步通信。
异步通信在异步通信中,数据⼀帧⼀帧地传送。
每⼀帧由⼀个字符代码组成,⼀个字符代码由起始位、数据位、奇偶校验位和停⽌位4部分组成。
每⼀帧的数据格式如图7-1所⽰。
⼀个串⾏帧的开始是⼀个起始位“0”,然后是5〜8位数据(规定低位数据在前,⾼位数据在后),接着是奇偶校验位(此位可省略),最后是停⽌位“1”。
起始位起始位"0”占⽤⼀位,⽤来通知接收设备,开始接收字符。
通信线在不传送字符时,⼀直保持为“1”。
接收端不断检测线路状态,当测到⼀个“0”电平时,就知道发来⼀个新字符,马上进⾏接收。
起始位还被⽤作同步接收端的时钟,以保证以后的接收能正确进⾏。
数据位数据位是要传送的数据,可以是5位、6位或更多。
当数据位是5位时,数据位为D0〜D4;当数据位是6位时,数据位为D0〜D5;当数据位是8位时,数据位为D0〜D7。
奇偶校验位奇偶校验位只占⼀位,其数据位为D8。
当传送数据不进⾏奇偶校验时,可以省略此位。
此位也可⽤于确定该帧字符所代表的信息类型,“1"表明传送的是地址帧,“0”表明传送的是数据帧。
停⽌位停⽌位⽤来表⽰字符的结束,停⽌位可以是1位、1.5位或2位。
停⽌位必须是⾼电平。
接收端接收到停⽌位后,就知道此字符传送完毕。
实验三单片机串行口编程
一、实验目的
1、掌握单片机串行口的工作方式;
2、掌握单片机串行口的编程方法。
二、实验内容
1、学习单片机串行口的工作方式、初始化以及应用等;
2、利用单片机串行口编写程序,利用串口助手工具通过PC机发送相应信息,单片机串行口根据接收到的信息控制开发板上的LED灯按一定规律工作。
要求:
“#”指令开始标志,“*”指令结束标志。
根据接收到的指令start—控制LED灯闪烁,闪烁频率1Hz;pause—控制LED点亮;stop—控制LED熄灭。
测试串口正常工作的代码(通过串口接收一个字符,再发送回串口)
#include <reg51.h>
main()
{
unsigned char a;
/*在12MHz下,设置4800波特率,方式1*/
TMOD=0x20; //设置定时器1的方式
TH1=0xf3; //设置定时器1的初值
TL1=0xf3;
SCON=0x50; //设置串行口方式1,并允许接收PCON=0x80; //SMOD=1
TR1=1; //启动定时器1
while(1)
{
while(RI==0);
a=SBUF;
RI=0;
SBUF=a;
while(TI==0);
TI=0;
}
}
三、实验设备
1、STC单片机开发板;
2、PC机以及串口线。
四、实验分析及关键代码
#include <reg52.h>
sbit led=P2^5;
unsigned char a; //串行
unsigned char num; //定时
unsigned char start[]="#start*";
unsigned char stop[]="#stop*";
unsigned char pause[]="#pause*";
unsigned char startNum,stopNum,pauseNum;
//初始化
void init()
{
TMOD=0x21; //设置定时器方式
//定时器
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
EA=1;
ET0=1;
//串口
TH1=0xf3;
TL1=0xf3;
SCON=0x50; //设置串行口方式1 01100000 PCON=0x80; //
TR1=1;
ES = 1; //允许串行中断
}
//定时器中断
void Timer0() interrupt 1
{
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
num ++;
if(num==20)
{
num=0;
led=!led;
}
}
//串行中断
void seri() interrupt 4
{
//RI接受中断标志TI发送中断标志if(RI)
{
a=SBUF;
RI=0;
SBUF=a;
while(TI==0);
TI=0;
//
if(start[startNum]==a && a!='\0')
startNum++;
else startNum=0;
if(pause[pauseNum]==a && a!='\0') pauseNum++;
else pauseNum=0;
if(stop[stopNum]==a && a!='\0')
stopNum++;
else stopNum=0;
if(startNum==7)
{
TR0=1;//启动定时器
}
if(pauseNum==7)
{
TR0=0;
led=0;
}
if(stopNum==6)
{
TR0=0;
led=1;
}
}
}
void main()
{
init();
while(1);
}。