传感器课程设计--电涡流位移传感器设计
- 格式:doc
- 大小:140.00 KB
- 文档页数:10
电涡流传感器位移实验一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:电涡流式传感器是一种建立在涡流效应原理上的传感器。
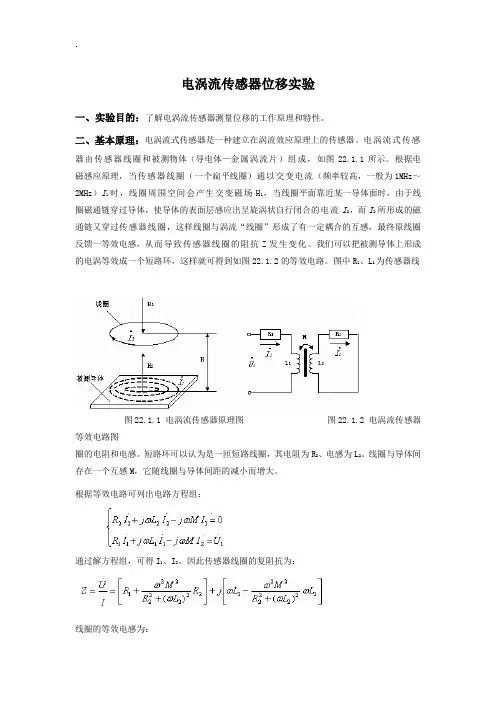
电涡流式传感器由传感器线圈和被测物体(导电体—金属涡流片)组成,如图22.1.1所示。
根据电磁感应原理,当传感器线圈(一个扁平线圈)通以交变电流(频率较高,一般为1MHz~2MHz)I1时,线圈周围空间会产生交变磁场H1,当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出呈旋涡状自行闭合的电流I2,而I2所形成的磁通链又穿过传感器线圈,这样线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感,从而导致传感器线圈的阻抗Z发生变化。
我们可以把被测导体上形成的电涡等效成一个短路环,这样就可得到如图22.1.2的等效电路。
图中R1、L1为传感器线图22.1.1 电涡流传感器原理图图22.1.2 电涡流传感器等效电路图圈的电阻和电感。
短路环可以认为是一匝短路线圈,其电阻为R2、电感为L2。
线圈与导体间存在一个互感M,它随线圈与导体间距的减小而增大。
根据等效电路可列出电路方程组:通过解方程组,可得I1、I2。
因此传感器线圈的复阻抗为:线圈的等效电感为:线圈的等效Q值为:Q=Q0{[1-(L2ω2M2)/(L1Z22)]/[1+(R2ω2M2)/(R1Z22)]}式中:Q0 —无涡流影响下线圈的Q值,Q0=ωL1/R1;Z22—金属导体中产生电涡流部分的阻抗,Z22=R22+ω2L22。
由式Z、L和式Q可以看出,线圈与金属导体系统的阻抗Z、电感L和品质因数Q值都是该系统互感系数平方的函数,而从麦克斯韦互感系数的基本公式出发,可得互感系数是线圈与金属导体间距离x(H)的非线性函数。
因此Z、L、Q均是x的非线性函数。
虽然它整个函数是一非线性的,其函数特征为"S"型曲线,但可以选取它近似为线性的一段。
其实Z、L、Q的变化与导体的电导率、磁导率、几何形状、线圈的几何参数、激励电流频率以及线圈到被测导体间的距离有关。
电涡流式位移传感器实验报告电涡流式位移传感器是一种能够测量目标物体相对于传感器的位移的设备。
它利用了电涡流效应,通过感应电磁场的变化来获取目标物体的位移信息。
电涡流效应是指当导体材料处于变化的磁场中时,会产生涡流。
这种涡流会导致导体内部的能量损耗,并产生一个反向的电磁场。
根据这个原理,电涡流式位移传感器通过测量涡流的大小和方向来确定目标物体的位移情况。
电涡流式位移传感器由传感器头和信号处理电路组成。
传感器头通常由导体线圈制成,将其安装在测量物体附近。
当目标物体发生位移时,导体线圈中的磁场也会发生变化,从而引起涡流的产生。
信号处理电路会对涡流信号进行采集和处理,最终输出位移的数值。
电涡流式位移传感器具有许多优点。
首先,它可以实时、精确地测量目标物体的位移,具有很高的测量精度。
其次,它不需要与测量目标物体直接接触,可以在非接触的情况下进行测量,避免了由于接触导致的误差和磨损。
此外,电涡流式位移传感器还具有响应速度快、抗干扰能力强等特点。
在实际应用中,电涡流式位移传感器被广泛应用于各种领域。
例如,在机械制造行业中,它可以用于测量机械零件的位移和变形,以确保机械设备的正常运行。
在航空航天领域,电涡流式位移传感器可以用于测量飞机结构的变形情况,以保证飞机的安全。
此外,它还可以应用于汽车制造、电子设备、医疗器械等领域。
然而,电涡流式位移传感器也存在一些局限性。
首先,它对目标物体的材料有一定的要求,只有导电性较好的材料才能产生涡流效应。
其次,传感器的测量范围相对较小,对于大范围的位移测量可能不适用。
此外,电涡流式位移传感器的成本较高,不适合用于一些低成本的应用场景。
电涡流式位移传感器是一种能够实时、精确地测量目标物体位移的设备。
它通过利用电涡流效应来感应目标物体的位移,并将其转化为电信号输出。
电涡流式位移传感器在各个领域有着广泛的应用,但也存在一些局限性。
随着科技的不断进步,电涡流式位移传感器将会得到更广泛的应用和发展。
成绩评定:_______传感器技术课程设计题目位移电涡流传感器测量电路设计电涡流传感器由于具有对介质不敏感、非接触的特点, 广泛应用于对金属的位移检测中。
为扩大电涡流传感器的测量范围, 采用恒频调幅式测量电路, 引用指数运算电路作为非线性补偿环节。
利用Matlab计算软件辅助设计了直径为60mn电涡流传感器探头,并结合测量电路进行实验。
实验结果表明最大测量范围接近90mm验证了该系统工作的稳定性,证明设计达到了预期效果。
关键词: 电涡流传感器; 测量电路;大位移; 线性化一、设计目的-------------------- 1二、设计任务与要求- --------------------- 12.1 设计任务 ---------------------- 12.2 设计要求 ---------------------- 1三、设计步骤及原理分析--------------- 13.1 设计方法----------------------- 13.2 设计步骤 ---------------------- 23.3 设计原理分析 -------------------- 6四、课程设计小结与体会--------------- 6五、参考文献- ------------------------- 6一、设计目的1. 了解电涡流传感器测量位移的工作原理和特性。
2. 了解电涡流传感器的前景及用途二、设计任务与要求2.1设计任务扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。
验证了该系统工作的稳定性,证明设计达到了预期效果。
2.2设计要求1. 工作在常温、常压、稳态、环境良好;2. 设计传感器应用电路并画出电路图;3. 应用范围:测量物体的位移。
三、设计步骤及原理分析3.1设计方法电涡流传感器具有体积小、非接触、对介质不敏感的特点,被广泛应用于对金属位移等的测量中。
(五) 电涡流传感器位移实验一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:通以高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
三、需用器件与单元:电涡流传感器实验模板、电涡流传感器、直流电源、数显单元、测微头、铁圆片。
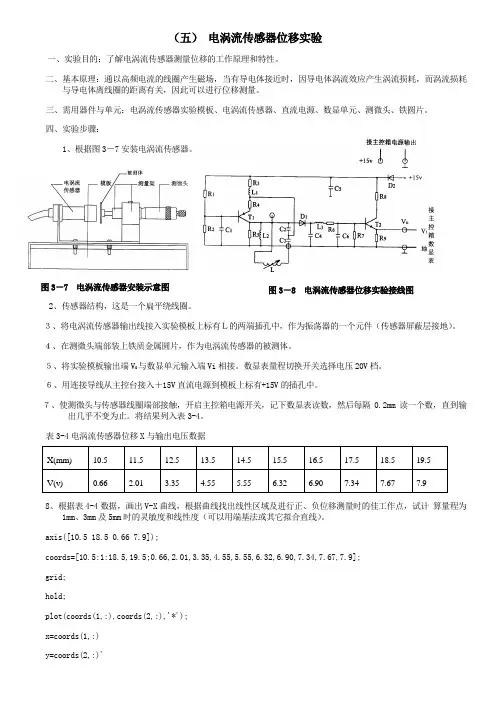
四、实验步骤:1、根据图3-7安装电涡流传感器。
图3-7 电涡流传感器安装示意图 2、传感器结构,这是一个扁平绕线圈。
3、将电涡流传感器输出线接入实验模板上标有L的两端插孔中,作为振荡器的一个元件(传感器屏蔽层接地)。
4、在测微头端部装上铁质金属圆片,作为电涡流传感器的被测体。
5、将实验模板输出端V 0与数显单元输入端Vi 相接。
数显表量程切换开关选择电压20V 档。
6、用连接导线从主控台接入+15V 直流电源到模板上标有+15V 的插孔中。
7、使测微头与传感器线圈端部接触,开启主控箱电源开关,记下数显表读数,然后每隔0.2mm 读一个数,直到输出几乎不变为止。
将结果列入表3-4。
表3-4电涡流传感器位移X 与输出电压数据8、根据表4-4数据,画出V-X 曲线,根据曲线找出线性区域及进行正、负位移测量时的佳工作点,试计 算量程为1mm 、3mm 及5mm 时的灵敏度和线性度(可以用端基法或其它拟合直线)。
axis([10.5 18.5 0.66 7.9]);coords=[10.5:1:18.5,19.5;0.66,2.01,3.35,4.55,5.55,6.32,6.90,7.34,7.67,7.9]; grid; hold;plot(coords(1,:),coords(2,:),'*'); x=coords(1,:) y=coords(2,:)'图3-8 电涡流传感器位移实验接线图b=size(coords);c=ones(1,b(2));MT=[c;x];M=MT';f=inv(MT*M)*MT*y['y=',num2str(f(2)),'x+',num2str(f(1))]x=-max(x):0.01:max(x);y=f(1)+f(2)*x;mistake=max(x-y)/(max(y)-min(y));fprintf('传感器的系数灵敏度S=%5.3f%%\n',abs(f(2)));fprintf('非线性误差f=%5.3f%%\n',mistake);plot(x,y);xlabel('x/mm');ylabel('V/v');title('电涡流传感器的性能试验');legend(['y=',num2str(f(2)),'x+',num2str(f(1))]);计算结果:ans =y=0.80333x+-6.825传感器的系数灵敏度S=0.803%非线性误差f=0.340%五、思考题:1)电涡流传感器的量程与哪些因素有关,如果需要测量±5mm的量程应如何设计传感器?答:金属导体的电阻率c,厚度t,线圈的励磁电流角频率ω以及线圈与金属块之间的距离x等参数有关。
位移传感器毕业设计【篇一:位移传感器设计报告】综合性实验报告实验课程:传感器与检测技术实验名称:位移检测传感器的应用姓名:学号:班级:指导教师:实验日期: 2013年12月17日位移检测传感器应用一、实验类型位移检测综合性实验二、实验目的和要求1.了解微位移、小位移、大位移的检测方法。
2.运用所学过的相关传感器设计三种位移检测系统。
3.对检测系统进行补偿和标定。
三、实验条件为了满足实验要求,现使用电涡流,光纤,和差动三种传感器设计位移检测系统,电涡流取0.1mm为单位,光纤取0.5mm为单位,差动取0.2mm为单位。
进行试验后,用matlab处理数据,分析结论。
(一):电涡流传感器测位移实验原理:通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
(二):光纤传感器测位移实验原理:反射式光纤位移传感器是一种传输型光纤传感器。
其原理如图36-1所示:光纤采用Y型结构,两束光纤一端合并在一起组成光纤探头,另一端分为两支,分别作为光源光纤和接收光纤。
光从光源耦合到光源光纤,通过光纤传输,射向反射面,再被反射到接收光纤,最后由光电转换器接收,转换器接收到的光源与反射体表面的性质及反射体到光纤探头距离有关。
当反射表面位置确定后,接收到的反射光光强随光纤探头到反射体的距离的变化而变化。
显然,当光纤探头紧贴反射面时,接收器接收到的光强为零。
随着光纤探头离反射面距离的增加,接收到的光强逐渐增加,到达最大值点后又随两者的距离增加而减小。
反射式光纤位移传感器是一种非接触式测量,具有探头小,响应速度快,测量线性化(在小位移范围内)等优点,可在小位移范围内进行高速位移检测。
(三):差动电感式传感器测位移实验原理:差动动螺管式电感传感器由电感线圈的二个次级线圈反相串接而成,工作在自感基础上,由于衔铁在线圈中位置的变化使二个线圈的电感量发生变化,包括两个线圈在内组成的电桥电路的输出电压信号因而发生相应变化。
电涡流传感器位移实验报告背景电涡流传感器是一种非接触式位移传感器,广泛应用于工业领域中的位移测量。
它基于涡流效应,通过感应涡流的变化来测量目标物体的位移。
在实验中,我们使用了一种常见的电涡流传感器,将其应用于位移测量,并对其性能进行了评估和分析。
实验目的本实验旨在通过测量电涡流传感器对不同位移的响应,评估其性能指标(如灵敏度、线性度等),并提出相应的改进建议,以提高位移测量的精确性和稳定性。
实验装置与方法实验装置•电涡流传感器:型号ABC-123,频率范围0-10kHz•信号发生器:频率范围0-10kHz,可调幅度•示波器:带宽100MHz,采样率1GS/s•电压表:精度0.1mV实验步骤1.准备实验装置,保证电涡流传感器与信号发生器、示波器的连接正确。
2.设置信号发生器的频率为2kHz,并将幅度调至适当水平。
3.将电涡流传感器固定在实验台上,使其与目标物体相对静止并平行。
4.使用示波器测量电涡流传感器输出的电压信号,并记录数据。
5.调整信号发生器的频率和幅度,重复步骤4,以获得不同位移下的电压信号。
数据分析与结果实验数据我们通过实验获得了电涡流传感器在不同位移下的电压信号数据,如下所示:位移 (mm) 电压 (mV)0 1.21 1.52 1.83 2.14 2.45 2.7曲线拟合与性能评估我们将实验数据进行曲线拟合,以评估电涡流传感器的性能指标。
首先,我们使用最小二乘法对数据进行线性拟合。
得到的拟合直线的方程为:V = 0.3d + 1.2其中V表示电压(mV),d表示位移(mm)。
通过拟合直线,我们可以计算出电涡流传感器的灵敏度为0.3 mV/mm,表示单位位移引起的电压变化量。
其次,我们计算了电涡流传感器的线性度。
线性度是衡量传感器输出与输入之间线性关系程度的指标,通常以百分比表示。
通过计算每个数据点与拟合直线之间的残差,并将其转化为线性度,我们得到了电涡流传感器的线性度为95%。
结果分析与建议通过对实验数据的分析和性能评估,我们得到了以下结论:1.电涡流传感器表现出良好的线性关系,其灵敏度为0.3 mV/mm。
电涡流传感器的仿真与设计一、本文概述随着科技的飞速发展,传感器技术作为现代工业、自动化控制以及科研实验等领域中不可或缺的一环,其重要性日益凸显。
电涡流传感器作为一种非接触式测量工具,因其高精度、快速响应和广泛的应用范围,受到了广泛关注。
本文旨在深入探讨电涡流传感器的仿真与设计,以期为其在实际应用中的优化和改进提供理论支持和实践指导。
本文首先将对电涡流传感器的基本原理进行阐述,包括电涡流效应的产生机制以及传感器的工作原理。
在此基础上,我们将对电涡流传感器的仿真技术进行深入分析,探讨如何利用仿真软件对传感器性能进行预测和优化。
接着,本文将重点讨论电涡流传感器的设计要点,包括线圈结构、信号处理电路、屏蔽措施等方面,以期提高传感器的测量精度和稳定性。
本文还将关注电涡流传感器在不同应用场景下的性能表现,如高温、高湿、强电磁干扰等恶劣环境下的适应性。
通过实际案例分析,我们将对传感器的性能进行客观评估,并提出针对性的改进措施。
本文将展望电涡流传感器未来的发展趋势,探讨新技术、新材料在传感器设计中的应用前景。
通过本文的研究,我们期望能够为电涡流传感器的仿真与设计提供一套系统的理论框架和实践方法,推动传感器技术的不断发展和创新。
二、电涡流传感器的基本原理电涡流传感器,作为一种非接触式的测量工具,其基本原理基于法拉第电磁感应定律和电涡流效应。
当交变电流通过传感器线圈时,会在其周围产生交变磁场。
当这个磁场靠近导电材料(如金属)表面时,会在材料内部感应出电涡流。
电涡流的大小和相位与磁场强度、材料电导率、磁导率以及传感器与材料之间的距离有关。
电涡流传感器通过测量这个交变磁场与电涡流之间的相互作用,从而实现对材料性质或位置的测量。
具体来说,当传感器与被测物体之间的距离发生变化时,电涡流的大小和相位也会相应变化,进而引起传感器线圈的电感、阻抗或电压的变化。
通过测量这些电气参数的变化,可以实现对被测物体位置、材料电导率等物理量的测量。
HEFEI UNIVERSITY OF TECHNOLOGY《传感器原理及应用》课程考核论文题目电涡流位移传感器设计班级机设八班学号姓名成绩机械与汽车工程学院机械电子工程系二零一二年五月电涡流位移传感器摘要:随着现代测量、控制盒自动化技术的发展,传感器技术越来越受到人们的重视。
特别是近年来,由于科学技术的发展及生态平衡的需要,传感器在各个领域的作用也日益显著。
传感器技术的应用在许多个发达国家中,已经得到普遍重视。
在工程中所要测量的参数大多数为非电量,促使人们用电测的方法来研究非电量,及研究用电测的方法测量非电量的仪器仪表,研究如何能正确和快速的非电量技术。
电涡流传感器已成为目前电测技术中非常重要的检测手段,广泛的应用于工程测量和科学实验中。
关键词:电涡流式传感器传感器技术电量非电量Abstract:With modern measurement, control box of automation technology development, the sensor technology is more and more attention by people. Especially in recent years, due to the development of science and technology and ecological balance the need, sensor in various fields are also increasingly significant role. The sensor technology application in many developed countries, has been paid attention to. In the project in measured parameters for the most power, the power to urge people to approach to the power, and the research method of the electricity measurement of electric instruments, to study how to correct and fast the power technology. The eddy current sensor has become the electrical measurement technology is very important means of detection, widely used in engineering survey and scientific experiments.Key words:Eddy current sensor, sensor technology ,non-power electrical measurement techniques,一:总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
电涡流传感器位移特性实验
实验目的:
研究电涡流传感器的位移特性。
实验原理:
电涡流传感器是利用电涡流现象进行测量的传感器。
当导体中存在变化的磁场时,就会形成涡流,导致导体表面电流密度分布不均匀,这种现象称为电涡流现象。
电涡流传感器是利用这种现象进行测量的。
电涡流传感器由一个固定的线圈和一个可动的导体组成,当可动导体相对于线圈发生位移时,会产生涡流,从而改变线圈的电阻值,进而得到位移信息。
实验器材:
电涡流传感器、信号放大器、信号采集器、示波器、位移台、自行设计的位移系统等。
实验步骤:
1. 将电涡流传感器固定在一定的位置上,接上信号放大器并连接示波器。
2. 在示波器上观察电涡流传感器输出信号的波形和大小。
3. 将电涡流传感器放置在位移台上,在不同的位移位置上对预期的位移系统进行移动操作。
4. 在每个位移位置上读取电涡流传感器输出信号的波形和大小。
5. 将实验数据进行处理和分析,得到电涡流传感器的位移特性曲线。
实验注意事项:
1. 实验过程中要注意调整信号放大器的增益和滤波器的带宽,以保证信号的质量。
2. 移动位移系统时要注意操作轻柔,避免对电涡流传感器和位移系统造成损坏。
3. 实验结束后要注意恢复实验现场和接线状态,并注意设备的安全。
实验七电涡流传感器位移实验一、实验目的1.了解电涡流式传感器的工作原理。
2.了解电涡流传感器测量位移的工作原理和特性。
3.掌握电涡流传感器的应用。
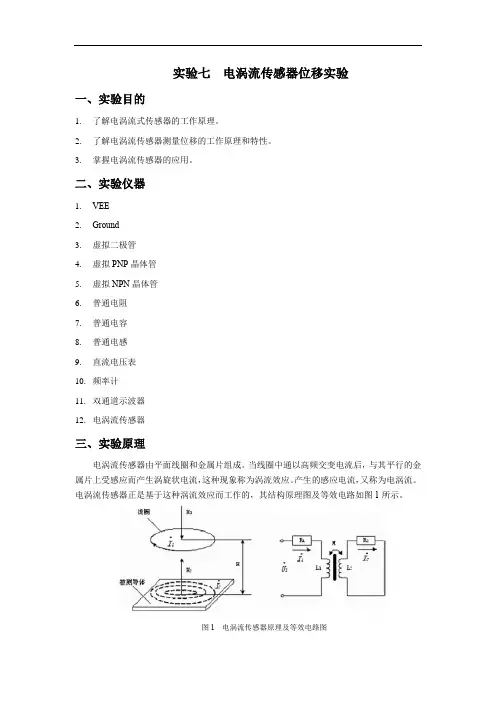
二、实验仪器1.VEE2.Ground3.虚拟二极管4.虚拟PNP晶体管5.虚拟NPN晶体管6.普通电阻7.普通电容8.普通电感9.直流电压表10.频率计11.双通道示波器12.电涡流传感器三、实验原理电涡流传感器由平面线圈和金属片组成。
当线圈中通以高频交变电流后,与其平行的金属片上受感应而产生涡旋状电流,这种现象称为涡流效应。
产生的感应电流,又称为电涡流。
电涡流传感器正是基于这种涡流效应而工作的,其结构原理图及等效电路如图1所示。
图1 电涡流传感器原理及等效电路图如图1所示,一个通有交变电流1I 的线圈,置于一块导电材料附近,由于交变电流的存在,在线圈周围就产生一个交变磁场1H ,导电材料内便产生电涡流2I ,电涡流2I 也将产生一个新磁场2H ,2H 与1H 方向相反,因而抵消部分原磁场1H ,从而导致线圈的等效阻抗发生变化。
可见,线圈与导体之间存在着磁的联系,若把导电材料看成一个具有内阻的线圈,则如图1所示的等效电路表示。
1R 、2R 分别为线圈和导电材料的等效电阻1L 、2L 分别为线圈和导电材料的等效电感。
M 为互感参数,表征线圈与导电材料之间磁联系强弱。
根据图1可列出下列方程:11112222210R I jwL I jwMI U R I jwL I jwMI +-=+-= (1)解式(1),可得线圈等效阻抗Z :222212122222222222U M M Z R R j L L R j L I R L R L ωωωωωω==++-=+++ (2) 前两项为等效电阻,第三项为等效电抗,第三项中括号内为等效电感。
线圈的品质因数为Q :221222222221222M L L R L Q MR R R L ωωωωω-+=++ (3) 由上不难看出,金属导体的电阻率ρ、磁导率μ、线圈与金属导体之间的距离x 以及线圈激励电流的角频率ω等参数,都将通过电涡流效应与线圈等效阻抗发生联系。
电涡流式位移传感器实验报告一、引言电涡流式位移传感器是一种常用的非接触式位移测量装置,它基于涡流效应原理,可用于测量金属物体的位移变化。
本实验旨在探究电涡流式位移传感器的原理和性能,并通过实验验证其在位移测量中的应用。
二、实验原理电涡流效应是指当导体在磁场中运动或受力时,由于磁场的变化而在导体中产生涡流的现象。
在电涡流式位移传感器中,传感器探头由线圈和磁铁构成。
当探头靠近金属物体时,磁铁产生的磁场会感应出涡流,并改变线圈的电阻。
通过测量线圈的电阻变化,可以确定金属物体的位移大小。
三、实验步骤1. 准备实验装置:将电涡流式位移传感器固定在测量平台上,将金属物体放置在传感器上方,并调整传感器与金属物体的距离。
2. 连接电路:将传感器的线圈接入测量电路中,保证电路的可靠连接。
3. 调节参数:根据实际情况,调节传感器的灵敏度和滤波器的参数,以获得准确的位移测量结果。
4. 进行位移测量:通过改变金属物体的位置或距离,记录传感器输出的电阻值,并计算出相应的位移值。
5. 数据分析:根据实验数据,分析位移测量的准确性和稳定性,评估电涡流式位移传感器的性能。
四、实验结果经过多次实验测量,我们得到了一系列位移测量数据,并计算出相应的位移值。
实验结果表明,电涡流式位移传感器具有较高的测量精度和稳定性,在不同位移范围内均能提供准确的测量结果。
五、实验讨论1. 影响位移测量精度的因素:在实验中,我们发现传感器与金属物体的距离、金属物体的材料和形状等因素都会对位移测量结果产生影响。
通过合理调整传感器的参数和选择合适的金属物体,可以提高位移测量的精度。
2. 传感器的应用范围:电涡流式位移传感器广泛应用于工业自动化、机械制造和航天航空等领域,用于测量零件的位移、振动和变形等参数,为工程设计和质量控制提供重要的数据支持。
六、结论通过本次实验,我们深入了解了电涡流式位移传感器的原理和性能,并验证了其在位移测量中的应用。
实验结果表明,电涡流式位移传感器具有高精度、稳定性好的优点,适用于各种位移测量场景。
电涡流传感器测量位移特性设计报告摘要:本设计根据金属位移量影响涡流效应的强弱,利用电涡流传感器测量出金属位移量引起的电压变化模拟信号,并作为AD采集卡的输入量,最终在上位机实现金属位移量和电压变化的动态显示。
本设计具有操作简单、精度高等特点。
关键词:AD采集卡,电涡流传感器,金属位移量,电压变化1 工作原理电涡流传感器采用的是感应电涡流原理,当带有高频电流的线圈靠近被测金属时,线圈上的高频电流所产生的高频电磁场便在金属表面上产生感应电流,电磁学上称之为电涡流。
电涡流效应与被测金属间的距离及电导率、磁导率、几何尺寸、电流频率等参数有关。
当线圈与金属体的距离发生变化时(除距离以外,所有的参数不变),电涡流传感器将位移量转换成电压变化的模拟信号送给AD采集卡,最终在上位机实现对金属位移量和电压变化的实时显示。
2硬件设计2.1系统框图金属位移量电涡流传感器PCI8735型AD采集卡上位机图2.1系统总体框图2.2 PCI8735介绍PCI8735是一种基于PCI总线的数据采集卡,可直接插在IBM-PC/AT或与这兼容的计算机内的任一PCI插槽中,主要应用于电子产品质量检测、信号采集、过程控制、伺服控制。
2.2.1PCI8735的管脚定义图2.2 PCI8735管脚排列PCI8735引脚功能描述如下表:表2.3 引脚功能表管脚信号名称管脚特性管脚功能定义AI0-AI31 Input AD模拟量输入管脚,分别对应于32个模拟单端通道,当为双端时,其AI0-AI15分别与AI16-AI31构成信号输入的正负两端,即AI0-AI15接正端,AI16-AI31接负端。
AGND GND 模拟信号地,当输入输出模拟信号时最好用它作为参考地2.2.2 DS18B20技术性能描述1.转换器类型:AD73212.输入量程(InputRange):±10V、±5V、±2.5V、0~10V3.转换精度:12位(Bit)有效位,第13位为符号位4.采样速率:最高系统通过率500KHz,不提供精确的硬件分频功能。
电涡流位移传感器实验一实验目的•1. 了解TR81系列电涡流位移传感器工作原理;•2. 熟悉实验仪器,搭建传感器使用电路,掌握传感器使用过程中的注意事项;二实验设备•电源(输出电压15V~18V)、数字万用表、探头、Φ11mm延伸电缆、、02前置器、DZ-30位移静校仪、百分表三实验原理•传感器的系统工作机理是电涡流效应。
当接•通传感器系统电源时,在前置器内会产生一个高频电流信号,该信号通过电缆送到探头的头部,在头部周围产生交变磁场H1。
•如果在磁场H1的范围内没有金属导体材料接近,则发射出去的交变磁场的能量会全部释放;反之,如果有金属导体材料靠近探头头部,则交变磁场H1将在导体的表面产生电涡流场,该电涡流场也会产生一个方向与H1相反的交变磁场H2。
由于H2的反作用,就会改变探头头部线圈高频电流的幅度和相位,即改变了线圈的有效阻抗。
这种变化既与电涡流效应有关,又与静磁学有关,即与金属导体的电导率、磁导率、几何形状、线圈几何参数、激励电流频率以及线圈到金属导体的距离参数有关。
假定金属导体是均质的,其性能是线性和各向同性的,则线圈─金属导体系统的物理性质通常可由金属导体的磁导率μ、电导率σ、尺寸因子r、线圈与金属导体的距离δ,线圈激励电流强度I和频率ω等参数来描述。
因此线圈的阻抗可用函数Z=F(μ,σ,r,δ,I,ω)来表示。
•如果控制μ,σ,r ,I ,ω恒定不变,那么阻抗Z 就成为距离δ的单值函数,由麦克斯韦尔公式可以求得此函数为一非线性函数,其曲线为“S ”形曲线,在一定范围内可以近似为一线性函数。
在实际应用中,通常是将线圈密封在探头中,线圈阻抗的变化通过封装在前置器中的电子线路处理转换成电压或电流输出。
这个电子线路并不是直接测量线圈的阻抗,而是采用并联諧振法,见图2,即在前置器中将一个固定电容和探头线圈L X并联并与晶体管T 一起构成一个振荡器,振荡器的振幅U X 与线圈阻抗成正比,因此振荡器的振幅U X 会随探头与被测间距δ的改变而改变。
电涡流式位移传感器实验报告前言位移传感器是一种用于测量目标物体位置变化的装置。
在各个领域中都有广泛的应用,比如工业自动化、机械制造以及医疗设备等。
本实验将研究一种常见的位移传感器——电涡流式位移传感器,并通过实验测试其性能和准确性。
一、实验原理电涡流位移传感器是一种非接触式传感器,通过检测金属目标物体上产生的电涡流来测量目标物体的位移。
当一个金属目标物体靠近传感器时,传感器中的线圈会产生交变磁场。
这个交变磁场会引起目标物体上的电流变化,从而产生一个反向的磁场与传感器磁场相互作用。
通过检测目标物体上的电流变化来测量目标物体的位移。
传感器输出的电压信号与目标物体的位置成正比。
二、实验准备1. 装置:电涡流位移传感器、目标物体、信号发生器、示波器。
2. 连接:将信号发生器和示波器连接到电涡流位移传感器上。
三、实验步骤1. 将目标物体放置在电涡流位移传感器的感应范围内。
2. 设置信号发生器的频率和振幅,可以根据实际需要进行设置。
3. 打开示波器,并选择合适的测量范围。
4. 观察示波器上显示的波形,并记录下电压的变化。
四、实验结果通过实验,我们得到了与目标物体位置变化相关的电压信号波形。
通过观察示波器上的波形,我们可以获得目标物体位移的信息。
实验结果表明电涡流式位移传感器具有较好的线性和精确性,可以用于准确测量目标物体的位移。
五、实验分析电涡流式位移传感器的原理是基于金属材料的导电性以及磁场和电流的相互作用。
目标物体的位置变化引起了电涡流的变化,从而影响传感器输出的电压信号。
通过对电压波形的观察和分析,我们可以得到目标物体位置变化的相关信息。
因此,电涡流式位移传感器在工业生产中应用非常广泛。
六、实验应用电涡流位移传感器可以用于各种需要测量位移的场合。
在机械制造中,可以用于检测零件的装配精度;在汽车工业中,可以用于测量活塞的位置变化;在医疗设备中,可以用于测量人体关节的运动等。
由于电涡流式位移传感器具有非接触式测量和高精度等特点,因此在现代工业中得到了广泛的应用。
电涡流传感器位移实验报告一、前言在工业生产和科研实验中,位移测量是非常重要的。
传统的位移测量方法有很多,但是由于各种原因,比如测量范围小、精度不高等,很难达到实际要求。
电涡流传感器由于其测量范围广、精度高等优点,在位移测量方面得到了越来越广泛的应用。
本次实验旨在通过对电涡流传感器实际应用过程中的位移测量进行研究,探究其应用的可行性和效果。
二、实验原理电涡流传感器是一种基于涡流效应的传感器,它利用电磁感应原理,在传感器和被测物体之间产生一种涡流,再通过测量这种涡流的变化情况来计算出被测物体的位移信息。
在实际应用中,将电涡流传感器固定在被测物体上,当被测物体发生位移时,由于涡流的变化,传感器会产生电信号,再通过信号处理器转化成数字信号,从而得到被测物体的位移信息。
三、实验步骤(一)实验设备准备我们使用的是一台B系列电涡流传感器,其工作频率为250 kHz,灵敏度为5 mV/μm。
同时,我们还需要一台信号处理器、一台电荷放大器和一台示波器。
(二)实验样品准备我们选择了一根长度为200 mm的金属棒作为实验样品。
在金属棒的一端固定电涡流传感器,另一端固定一个位移测量装置。
(三)实验数据采集将电涡流传感器和位移测量装置连接到信号处理器上,启动实验设备,让金属棒发生位移。
在位移过程中,通过示波器对信号进行实时监测和记录,并将数据导出到电脑中进行分析。
(四)实验结果分析通过对实验采集的数据进行分析,我们得到了金属棒的位移曲线图。
从曲线图中可以看出,在位移范围为0-100 mm时,电涡流传感器的测量精度可以达到0.5 μm,这个精度已经可以满足大多数实际应用的需求。
同时,我们还发现,在位移范围为0-100 mm时,电涡流传感器的灵敏度为5 mV/μm,这个灵敏度足以满足大多数实际应用的需求。
四、实验结论通过本次实验,我们得到了以下结论:(一)电涡流传感器的测量精度可以达到0.5 μm,足以满足大多数实际应用的需求。
电涡流式位移传感器实验报告电涡流式位移传感器实验报告引言:电涡流式位移传感器是一种常用的非接触式传感器,广泛应用于工业领域中的位移测量。
本实验旨在研究电涡流式位移传感器的工作原理、特性以及其在位移测量中的应用。
一、实验目的本实验的主要目的是探究电涡流式位移传感器的工作原理,并通过实验验证其在位移测量中的准确性和可靠性。
二、实验装置与方法实验所使用的装置包括电涡流式位移传感器、信号处理器、位移测量平台等。
实验步骤如下:1. 将电涡流式位移传感器固定在位移测量平台上。
2. 连接传感器与信号处理器,确保传感器与处理器之间的信号传输畅通。
3. 调整传感器与被测物体之间的距离,使其处于适当的工作范围内。
4. 通过信号处理器采集传感器输出的信号,并进行数据处理和分析。
三、实验结果与分析通过实验测量,我们得到了电涡流式位移传感器在不同位移下的输出信号,进而得到了位移与输出信号之间的关系曲线。
实验结果显示,电涡流式位移传感器具有以下特点:1. 高精度:传感器能够实现亚微米级的位移测量,具有较高的精度。
2. 非接触式测量:传感器与被测物体之间无需直接接触,减少了传感器的磨损和损坏的可能性。
3. 快速响应:传感器能够快速响应被测物体的位移变化,实时反馈测量结果。
4. 宽工作范围:传感器能够适应不同位移范围的测量需求。
四、实验误差分析在实验过程中,我们注意到了一些可能导致测量误差的因素,包括:1. 环境温度:环境温度的变化可能会对传感器的测量结果产生影响,因此在实际应用中需要进行温度补偿。
2. 电磁干扰:外部电磁场的存在可能会对传感器的信号传输和测量结果产生干扰,需要采取相应的屏蔽措施。
3. 传感器位置:传感器与被测物体之间的位置关系可能会对测量结果产生影响,需要进行准确定位。
五、实验应用与展望电涡流式位移传感器在工业领域中有广泛的应用前景。
它可以用于机械设备的位移测量、振动监测、材料疲劳分析等方面。
未来,随着科技的不断发展,电涡流式位移传感器有望进一步提高其精度和稳定性,扩大其应用范围。
传感器课程设计--电涡流位移传感器设计目录
摘要
电涡流位移传感器设计一、设计要求
二、总体设计方案
三、电涡流传感器的基本原理
3-1电涡流效应和传感器等效电路
3-2电涡流形成的范围
四、传感器的结构形式
五、测量电路及分析
5-1 测量电路
5-2 电路各单元分解
六、实验数据及误差分析
参考文献
摘要
随着现代测量、控制盒自动化技术的发展,传感器技术越来越受到人们的重视。
特别是近年来,由于科学技术的发展及生态平衡的需要,传感器在各个领域的作用也日益显著。
传感器技术的应用在许多个发达国家中,已经得到普遍重视。
在工程中所要测量的参数大多数为非电量,促使人们用电测的方法来研究非电量,及研究用电测的方法测量非电量的仪器仪表,研究如何能正确和快速的非电量技术。
电涡流传感器已成为目前电测技术中非常重要的检测手段,广泛的应用于工程测量和科学实验中。
关键词:电涡流式传感器传感器技术电量非电量电涡流位移传感器设计一、设计技术要求
1、线性范围(mm):1
2、分辨率(um):1
3、线性误差:《3%
4、使用温度范围:-15~+80
二、总体方案设计
电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。
根据下面的组成框图,构成传感器。
根据组成框图,具体说明各个组成部分的材料:
(1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,耗小,电性能好,热膨胀系数小。
线圈框架的材料是聚四氟乙烯,其损
(2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。
(3)测量电路:本电路拟采用变频调幅式测量电路。
三、电涡流传感器的基本原理
3?1、电涡流效应和传感器等效电路
电涡流式传感器是利用电涡流效应,将位移、温度等非电量转化为阻抗的变化(或电感的变化,或Q值的变化)从而进行非电量电测的。
根据法拉第电磁感应定律,当传感器探头线圈通以正弦交变电流i时,线圈周围空间必1然产生正弦交变磁场H,它使置于此磁场中的被测金属导体表面产生感应电流,即电涡流,1
如图2-2中所示。
与此同时,电涡流i又产生新的交变磁场H;H与H方向相反,并力图削弱2221
H,从而导致探头线圈的等效电阻相应地发生变化。
其变化程度取决于被测金属导体的电阻1
率ρ,磁导率μ,线圈与金属导体的距离x,以及线圈激励电流的频率f等参数。
如果只改变
上述参数中的一个,而其余参数保持不变,则阻抗Z就成为这个变化参数的单值函数,从而确定该参数的大小。
电涡流传感器的工作原理,如图2-2所示:
为了便于分析,把被测金属导体上形成的电涡流等效成一个短路环中的电流,这样就可以得到如图2-3所示的等效电路。
图中R1,L1为传感器探头线圈的电阻和电感,短路环可以认为是一匝短路线圈,其中R2,L2为被测导体的电阻和电感。
探头线圈和导体之间存在一个互感M,它随线圈与导体间距离
为激励电压,根据基尔霍夫电压平衡方程式,上图等效电路的平衡方程式的减小而增大。
U1
如下:
经求解方程组,可得I1和I2表达式:
由此可得传感器线圈的等效阻抗为:
从而得到探头线圈等效电阻和电感。
通过式(2-4)的方程式可见:涡流的影响使得线圈阻抗的实部等效电阻增加,而虚部等效电感减小,从而使线圈阻抗发生了变化,这种变化称为反射阻抗作用。
所
以电涡流传感器的工作原理,实质上是由于受到交变磁场影响的导体中产生的电涡流起到调节线圈原来阻抗的作用。
因此,通过上述方程组的推导,可将探头线圈的等效阻抗Z表示成如下一个简单的函数关系:
其中,x为检测距离;μ为被测体磁导率;ρ为被测体电阻率;f为线圈中激励电流频率。
所以,当改变该函数中某一个量,而固定其他量时,就可以通过测量等效阻抗Z的变化来确定该参数的变化。
在目前的测量电路中,有通过测量ΔL或ΔZ等来测量x ,ρ,μ,f的变化的电路。
3?2电涡流形成的范围
见资料
四、传感器的结构形式
电涡流传感器结构很简单,主要是由一个固定在框架上的扁平线圈组成。
线圈是用多股其保险或银丝绕制而成,一般放在传感器的端部,线圈可绕在框架的槽内,也可用粘接剂粘在端部,下图为CEF1型涡流传感器。
CEF1型框架用聚四氟乙烯制成,线圈绕在框架的槽内,其性能见下表。
表略
根据设计参数要求,CEF1-1000型传感器。
图3 涡流传感器
五、测量电路及分析
5-1测量电路
测量电路的任务就是把位移x的变化变换为电压或频率的变化。
可以用三种类型的测量电路:电桥电路,谐振电路,正反馈电路。
目前所用的谐振电路有三种类型:定频调幅式、变频调幅式与调频式。
本次设计拟采用变频调幅式(调频调幅式)测量电路。
变频调幅式测量电路
该电路的核心是一个电容三点式振荡器,传感器线圈是震荡回路的一个电感元件。
这种电路的测量原理是:当无被测导体时,回路谐振于f0,此时Q值最高,所以对应的输出电压U0最大。
当非软磁材料制成的被测导体靠近传感器时,谐振峰右移,谐振频率增高为f1,谐振曲线由于Q值降低,而显得“矮胖”。
所以这时对应的输出电压U1将降低。
当被测导体进一步靠近传感器线圈时,谐振频率增高为f2,输出电压降为U2???。
当被测导体是软磁材料时,则随被测导体靠近线圈,谐振频率降低为f1,
f2???,输出电压也由U0依次降为U1,U2???。
这时得到的一组谐振曲线如图所示。
5-2电路各单元分解
这个测量电路由三部分组成,即
(1)电容三点式振荡器(西勒振荡器) 其作用是将位移变化引起的振荡回路的Q 值变化转化成高频载波信号的幅值变化。
为使电路具有较高的效率而自行起振,电
路采用自给偏压的办法。
适当选择振荡管的分压电阻的比值,可使电路静态工作点处于甲乙类。
从变频调幅式测量电路图可分析出线圈震荡电流由其中的西勒振荡电路提供。
下图为西勒振荡电路。
西勒震荡电路图图2
西勒振荡器是一种改进型的电容反馈振荡器,它是克拉波电路的改进电路。
这种电路频率稳定性高。
因为可通过C4改变振荡频率,且接入系数不受C4影响,所以在整个波段中振荡
振幅比较平稳。
真两点使西勒电路的频率能在比较宽的范围内调节。
西勒振荡电路的频率为
f,1/2,LC, 。
''CCC123C,,C,4''''''C,C,CC,C,CCC,CC,CC11022i122331式中,。
其中,;
C,,CC,,C3132当及时,振荡频率为
1f,02,L(C,C)34 ,
CC12与受输入输出电容(包括闲散电容)影响的与无关,因此提高了振荡频率的稳定性。
CC34西勒振荡电路的振荡频率可以通过改变来调整。
因比克拉波电路取值大~故频率覆盖系数大,易调整,频率稳定度高,实际应用较多。
西勒振荡等效电路图图3
上图为在实际应用中的西勒电路改进型,在实际应用中可用可调电感,而可调电容换成固定电容。
在大多数电视机中大多采用西勒振荡电路。
此时的振荡频率为f,1/2,LC, 。
(2)检波器检波器由检波二极管和派形滤波器组成,采用派形滤波器可适应电流变化较大,而又要求波纹很小的情况,可获得平滑的波形。
检波器的作用是将高频载波中的测量信息不失真的取出。
LC滤波器在二极管之后如图所示,
LC滤波电路
由于二极管有单向导通性,因此有部分正弦波经由二极管,而形成半波正弦波。
在通过下部LC低通滤波器滤去交流分量。
从而输出直流分量
(3)射极跟随器由于射随器具有输入阻抗高、输出阻抗低,并有良好的跟
随特性等优点,所以用来作为输出极以获得尽可能大的不失真输出幅度。
六。