RS232主从式通讯协议V2.0
- 格式:doc
- 大小:108.50 KB
- 文档页数:5
rs232通讯协议RS232通讯协议是一种用于串行通信的标准协议,它定义了数据通信的电气特性和信号传输的协议。
RS232通讯协议广泛应用于计算机、工业控制、通信设备等领域,是一种非常重要的通讯标准。
首先,我们来了解一下RS232通讯协议的基本特性。
RS232通讯协议使用串行通信,即一次只能发送一个比特。
它采用了一对差分信号线(TXD和RXD)进行数据传输,其中TXD用于发送数据,RXD用于接收数据。
此外,RS232还定义了数据传输的时序和波特率等参数,确保数据能够准确可靠地传输。
在RS232通讯中,数据是以ASCII码的形式进行传输的。
ASCII码是一种使用7位或8位二进制编码的字符集,它包括了数字、字母、标点符号等字符。
在RS232通讯中,数据通过TXD线发送出去,接收方通过RXD线接收数据,并将其转换为ASCII码进行解析。
除了数据传输外,RS232通讯协议还定义了一些控制信号,用于控制数据传输的流程。
其中,RTS(Ready to Send)和CTS(Clear to Send)信号用于控制发送方和接收方之间的数据流控制,DSR(Data Set Ready)和DTR(Data Terminal Ready)信号用于表示设备的就绪状态,而RI(Ring Indicator)和CD(Carrier Detect)信号则用于表示通讯线路的状态。
在实际应用中,RS232通讯协议需要使用特定的硬件接口来实现数据的传输。
常见的RS232接口包括DB9和DB25两种类型,它们分别使用9针和25针连接器进行数据传输。
此外,为了提高数据传输的可靠性,通常还会使用一些线缆和转换器来适配不同设备之间的接口。
总结一下,RS232通讯协议是一种重要的串行通信标准,它定义了数据通信的电气特性和信号传输的协议。
通过了解RS232通讯协议的基本特性和硬件接口,我们可以更好地理解和应用这一通讯标准,为各种设备之间的数据传输提供可靠的支持。
rs232协议标准RS232协议标准。
RS232是一种串行通信协议,用于在数据通信设备之间进行数据传输。
它是由美国电子工业协会(EIA)制定的一种标准,用于定义计算机和外部设备之间的通信接口。
RS232协议标准在计算机和外部设备之间的通信中发挥着重要作用,本文将对其进行详细介绍。
首先,RS232协议标准定义了通信设备之间的物理连接和电气特性。
它规定了通信设备之间的连接方式,包括连接线的引脚分配、传输速率、数据位、停止位、奇偶校验等参数。
这些规定保证了不同设备之间的兼容性,使它们能够进行可靠的数据传输。
其次,RS232协议标准还规定了通信设备之间的数据格式和控制信号。
它定义了数据的传输格式,包括起始位、数据位、停止位和奇偶校验位等,以及控制信号的使用方式,如数据就绪、数据发送、数据接收、数据结束等。
这些规定确保了数据在通信设备之间的正确传输和解释。
此外,RS232协议标准还定义了通信设备之间的通信协议。
它规定了通信设备之间的数据交换方式,包括同步传输和异步传输两种方式。
在同步传输中,数据以恒定的速率进行传输,而在异步传输中,数据以不定时的方式进行传输。
这些规定使不同通信设备能够根据自身的特性进行数据交换,从而实现了灵活的通信方式。
最后,RS232协议标准还规定了通信设备之间的控制和错误检测方式。
它定义了通信设备之间的控制信号,用于控制数据的传输和接收。
同时,它还定义了错误检测和纠正的方式,以确保数据在传输过程中的完整性和准确性。
总之,RS232协议标准在计算机和外部设备之间的通信中起着至关重要的作用。
它定义了通信设备之间的物理连接、数据格式、控制信号、通信协议和错误检测方式,保证了它们能够进行可靠的数据传输。
因此,了解和遵守RS232协议标准对于计算机和外部设备之间的通信至关重要。
rs232通讯协议RS232通讯协议是一种常用于串行通信的标准,它定义了电脑与外部设备之间的数据传输方式。
RS232通讯协议采用了一种串行的、单向的通信方式,将数据以二进制的形式进行传输。
RS232通讯协议的最大传输速率为115200位/秒。
它使用一条差分传输线来传输数据,其中一个线路被称为发送线路(TXD),另一个线路被称为接收线路(RXD)。
发送线路负责将数据从电脑发送到外部设备,接收线路负责将数据从外部设备接收到电脑。
RS232通讯协议中的数据传输是以字节为单位的,每个字节包含8位数据位、1位起始位、1位停止位和可选的奇偶校验位。
在RS232通讯协议中,数据的传输是由发送方和接收方共同完成的。
发送方首先发送起始位,这个位的值为0,表示数据的传输即将开始。
接着发送方发送数据位,这是数据的实际内容。
数据位的顺序是由最低为开始的,依次为D0、D1、D2、D3、D4、D5、D6、D7。
数据位的值是发送方要传输的数据。
然后发送方发送可选的奇偶校验位,用于检测传输过程中是否发生了错误。
最后发送方发送停止位,这个位的值为1,表示数据的传输已经结束。
接收方在接收到起始位后,开始接收数据位。
接收方根据起始位的信号来确定数据的传输开始,并依次接收数据位。
接收方还会接收可选的奇偶校验位,用于检测数据传输过程中是否发生了错误。
最后接收方接收停止位,这个位的信号表示数据的传输已经结束。
在RS232通讯协议中,数据传输的成功率是很高的。
由于使用了差分传输线路,可以有效地减少电磁干扰的影响。
此外,RS232通讯协议还支持双工通信,即发送方和接收方可以同时进行数据传输,提高了通信的效率。
RS232通讯协议的应用非常广泛,特别是在计算机与外部设备之间的数据传输中。
它可以用于连接计算机和打印机、调制解调器、路由器等设备,实现数据的传输和控制。
总之,RS232通讯协议是一种常用的串行通信标准,它定义了电脑与外部设备之间的数据传输方式。
rs232协议RS232协议是指一种用于串行通信的标准协议,它规定了数据通信的电气特性、接口信号定义和通信控制信号等。
这种协议最早于1962年由电子行业协会(EIA)制定,后来在1997年由美国电子电气工程师协会(IEEE)重新命名为EIA-232标准。
RS232协议广泛应用于计算机串行通信、外设连接以及工业自动化控制等领域。
RS232协议通过一组全双工的信号线(包括数据线、控制线和地线)进行数据传输。
其中,数据线包括发送端数据线(TXD)和接收端数据线(RXD),用于在发送端和接收端之间传输数据;控制线包括请求发送线(RTS)、清除发送线(CTS)、数据就绪线(DSR)和数据终端就绪线(DTR),用于控制数据传输的流程和状态。
RS232协议定义了数据的传输格式,包括起始位、数据位、校验位和停止位。
起始位(Start Bit)指示数据传输开始,常为逻辑低电平;数据位(Data Bit)指定每个数据字节的位数,通常为8位;校验位(Parity Bit)用于检测数据传输的错误,并提供纠错能力;停止位(Stop Bit)指示数据传输的结束,常为逻辑高电平。
通过这种格式化的数据传输方式,RS232协议确保了数据的可靠性和准确性。
在RS232协议中,通过控制线的状态来进行通信的协调和控制。
例如,发送端通过请求发送线(RTS)向接收端发出数据传输请求,接收端在收到请求后通过清除发送线(CTS)确认并开始数据接收。
同时,接收端还通过数据就绪线(DSR)和数据终端就绪线(DTR)向发送端传递数据接收状态和设备准备就绪状态的信息。
RS232协议支持数据的全双工传输,即发送端和接收端可以同时进行数据的发送和接收。
这种特性使得RS232协议非常适用于设备之间的通信,例如计算机和打印机、计算机和调制解调器之间的连接。
此外,RS232协议还定义了串行通信的接口信号电平范围,包括逻辑低电平(-3至-25V)和逻辑高电平(3至25V),以保证数据的传输可靠性。
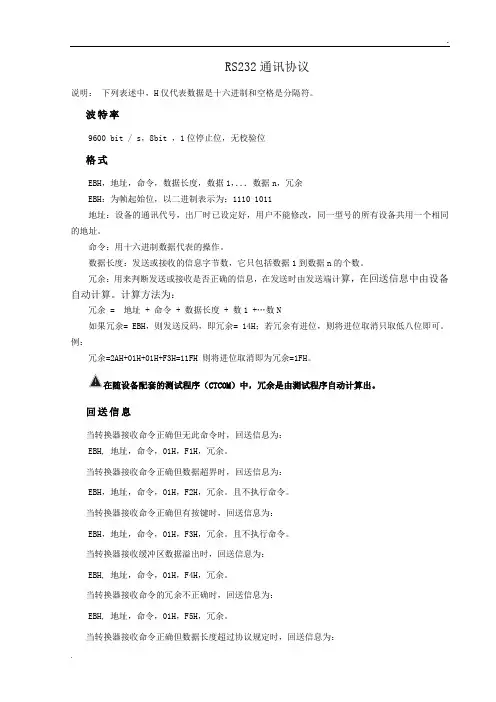
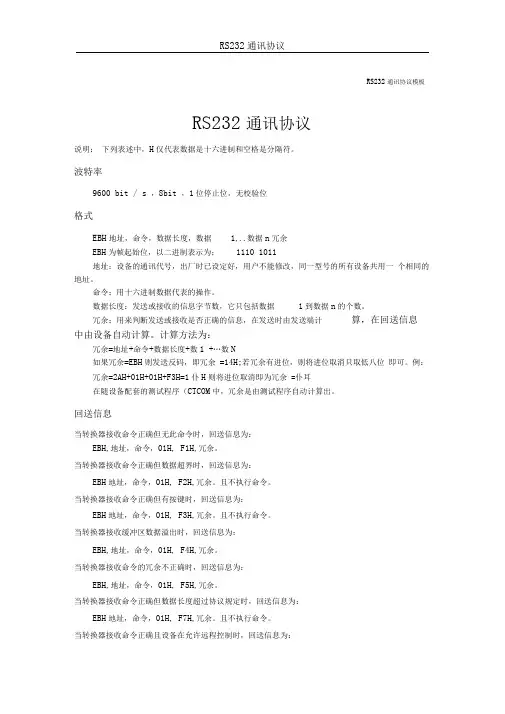
RS232通讯协议说明:下列表述中,H仅代表数据是十六进制和空格是分隔符。
波特率9600 bit / s,8bit ,1位停止位,无校验位格式EBH,地址,命令,数据长度,数据1,...数据n,冗余EBH:为帧起始位,以二进制表示为:1110 1011地址:设备的通讯代号,出厂时已设定好,用户不能修改,同一型号的所有设备共用一个相同的地址。
命令:用十六进制数据代表的操作。
数据长度:发送或接收的信息字节数,它只包括数据1到数据n的个数。
冗余:用来判断发送或接收是否正确的信息,在发送时由发送端计算,在回送信息中由设备自动计算。
计算方法为:冗余 = 地址 + 命令 + 数据长度 + 数1 +…数N如果冗余= EBH,则发送反码,即冗余= 14H;若冗余有进位,则将进位取消只取低八位即可。
例:冗余=2AH+01H+01H+F3H=11FH 则将进位取消即为冗余=1FH。
在随设备配套的测试程序(CTCOM)中,冗余是由测试程序自动计算出。
回送信息当转换器接收命令正确但无此命令时,回送信息为:EBH, 地址,命令,01H,F1H,冗余。
当转换器接收命令正确但数据超界时,回送信息为:EBH,地址,命令,01H,F2H,冗余。
且不执行命令。
当转换器接收命令正确但有按键时,回送信息为:EBH,地址,命令,01H,F3H,冗余。
且不执行命令。
当转换器接收缓冲区数据溢出时,回送信息为:EBH, 地址,命令,01H,F4H,冗余。
当转换器接收命令的冗余不正确时,回送信息为:EBH, 地址,命令,01H,F5H,冗余。
当转换器接收命令正确但数据长度超过协议规定时,回送信息为:EBH,地址,命令,01H,F7H,冗余。
且不执行命令。
当转换器接收命令正确且设备在允许远程控制时,回送信息为:EBH, 地址,命令,01H,FAH,冗余。
并执行命令。
当转换器接收地址不正确时,不回送任何信息。
设备地址VFT-2*2转换器的地址是59H。
RS232通讯协议RS232通讯协议是一种常用的串口通讯协议,用于定义串行通信数据的格式和传输规则。
RS232协议在计算机和外部设备之间传输数据,例如打印机、调制解调器、串行鼠标等。
本文将详细介绍RS232通讯协议的特点、工作原理和常见应用。
一、RS232通讯协议的特点1.单工通信:RS232协议只能实现单工通信,即数据的传输只能在一个方向上进行。
发送端称为DTE(数据终端设备),接收端称为DCE(数据通讯设备)。
2.异步通信:RS232协议使用异步通信模式,数据的传输不依赖于时钟信号。
发送端和接收端通过起始位、数据位、校验位和停止位来识别数据的边界。
3.硬件电平:RS232协议使用正负电平表示数据的逻辑值,-3V到-25V表示逻辑1,+3V到+25V表示逻辑0。
这种电平差异可以有效地抵抗干扰,并提高信号的可靠性。
4.数据位数可变:RS232协议支持数据位数的灵活配置,常见的有7位、8位和9位。
数据位数越多,传输的数据范围越广。
二、RS232通讯协议的工作原理1.物理层:物理层负责定义RS232通信的电气规范,包括电平范围、接口类型和接线方式。
通过物理层的规范,确保数据能够正确地在发送端和接收端之间传输。
2.数据链路层:数据链路层负责定义数据的帧结构和传输规则。
每一帧数据由起始位、数据位、校验位和停止位组成,起始位表示数据的开始,停止位表示数据的结束,数据位和校验位用于传输数据和校验数据的准确性。
3.应用层:应用层负责定义数据的具体格式和处理方法。
例如,发送端发送的数据可能是一条命令,接收端则根据命令执行相应的操作。
三、RS232通讯协议的应用1.打印机:计算机通过RS232协议将要打印的数据发送给打印机,打印机通过RS232协议接收数据并进行打印操作。
3.串行鼠标:计算机通过RS232协议接收鼠标发送的数据,根据鼠标的移动和点击等操作进行相应的处理。
4.工业控制系统:RS232通讯协议常用于工控系统中,用于与各种传感器、执行器等设备进行数据交互,实现自动化控制。
BD 碟机RS-232口测试方法有的BD碟机带有RS232接口,用户可以通过此接口控制对碟机进行操作。
通常 RS-232 接口为9个接脚(称为DB9) ,DB9所用到的管脚是2(RXD接收端)、3(TXD发送端)、5(GND地)这三个管脚。
一般个人计算机上会有两组 RS-232 接口,分别称为 COM1 和 COM2。
用串口线将碟机与电脑(通常为COM1)相连。
在电脑上运行AccessPort.exe文件,在界面选“工具――配置参数”出现选项界面,可对常规参数进行设置。
串口:选串口线所接电脑的那一个串口(通常为COM1)。
波特率:9600。
校验位:None。
数据位:8停止位:1AccessPort命令行的格式为:<Start of Command><Command Code>[<sp><Parameters>] <End of Command><Start of Command> = #, ASCII 0x23<Command Code> = <byte><byte><byte><sp> = space, ASCII 0x20<Parameters> = command-specific<End of Command> = CR, ASCII 0x0d例如输入:# EJT选十六进制数后,输入的字符串变为:23 45 4A 54 0D点击“发送数据”按钮。
命令通过电脑的串口发送给碟机,碟机执行开仓(或关仓)动作。
附A:命令表命令码遥控按键功能可能的响应POW POWER Power on/off toggle OK ON (Responseis given after theplayer completespower-oninitialization)OK OFFSRC Source Source Selection EJT EJECT Tray Open/Close OK OPENOK CLOSEPONDiscrete OnPower OnOK ON(Response is given after the player completes power-on initialization) POF Discrete Off Power OffOK OFFSYS P/NPAL/NTSC system selection OK NTSC OK PALOK AUTO DIM DIMMERDim front panelOK ON OK DIM OK OFF PUR PURE AUDIO Pure audio OK VUP VOL + Volume up VDN VOL - Volume down MUT MUTE MuteNU1 1 Numeric key 1 NU2 2 Numeric key 2 NU3 3 Numeric key 3 NU4 4 Numeric key 4 NU5 5 Numeric key 5 NU6 6 Numeric key 6 NU7 7 Numeric key 7 NU8 8 Numeric key 8 NU9 9 Numeric key 9 NU0Numeric key 0CLR CLEAR Clear input GOT GOTO Direct track access HOM HOMEHome MenuPUP PAGE UP PDN PAGE DOWN OSD DISPLAYOn screen display TTL TITLE/TOP MENU Disc title menu MNUMENU/POP-UP MENUDisc menuNUP Up Arrow Navigation NLT Left Arrow Navigation NRT Right Arrow Navigation NDN Down Arrow NavigationSEL SELECT/ENTER Navigation SET SETUP Enter setup menuRETRETURNReturn to previous menuRED RED GRN GREEN BLU BLUEYLW YELLOWSTP STOPStopPLA Discrete PLAY Play PAU Discrete PAUSE Pause PRE SKIP PREV Previous track REV REV Fast reverse OK 2X FWD FWD Fast forward OK 4X NXTSKIP NEXTNext trackAUD AUDIOAudio track selectionSUB SUBTITLE Subtitle ANG ANGLE Angle selection ZOM ZOOM Zoom ratio SAP SAP Secondary Audio ProgramATB A-BA/B repeat OK AOK AB OK OFF RPT REPEAT Repeat selection PIP PIPHDM HDMI/RESOLUTION HDMI output resolution selection OK 480PER附B :询问命令表: 命令 功能可能的响应 QPW Query power status OK ON OK OFFQVR Query firmware version OK BDP83-14-0306 QVL Query volume OK 100 OK MUTE QHDQuery HDMI resolutionOK 480POK 720P50OK 1080P23.976QPLQuery playback statusOK No Disc OK Play OK Pause OK Stop OK Loading OK FWD OK REV OK SetupOK Home Menu ER QTK Query Track/Title OK 2/10 QCH Query ChapterOK 3/3QTE Query Track/Title elapsed timeOK 0:01:34QTR Query Track/Title remaining timeOK 1:20:23 QCE Query Chapter elapsed timeOK 0:01:34QCR Query Chapter remaining timeOK 0:12:22 QEL Query Total elapsed time OK 0:05:12 QRE Query Total remaining time OK 1:34:44 QDTQuery disc typeOK DVD-Video OK SACD OK No Disc OK Loading OK OpenQAT Query audio typeOK DD 1/1OK DD 1/5 English OK DTS 2/5 English QSTQuery subtitle typeOK OFFOK 1/1 English附C :增强命令表: 命令参数功能 可能的响应 SHD SDI (480i/576i) SDP (480p/576p) 720P 1080ISet HDMI output resolutionOK 480P ER1080PSRC (Source Direct) AUTOSPN NTSC PAL AUTO Set P/N System ConversionOK 480P ERSZM 1AR FS US 1.2 1.3 1.5 2 1/2 3 4 1/3 1/4 Set zoom ratioAR =Stretch/Letterbox/Pillarbox FS = Full Screen US = Underscan(HDMI Output: 1, AR, FS, US, 1.2, 1.3, 1.5, 2, 1/2;Component Ouput: 1, 2, 3, 4, ½, 1/3, ¼)OK 1.2 ER SVL0 – 100 MUTESet volume control OK 100 SFF 12 3 4 5 Start fast forwardOK 4SRV 12 3 4 5 Start fast reverse OK 2SRP CHTT ALL OFF SHF RNDRepeat chapter Repeat title Repeat all Repeat off Shuffle RandomOK CHER INVALIDSRH T3 C10T3 0:12:13C4 0:00:34Search to Title 3 Chapter 10 Search to Title 3 0:12:13 position Search to Chapter 4 0:00:34 position Search to Title 3 OK ER INVALIDT3C10C0 0:00:34 0:12:13 Search to Chapter 10 in current title or Track 10 Search to 0:00:34 of current chapter or trackSearch to 0:12:13 of current track or discDPL DirectPlay OK RST Reset RS232 Command –Clean all command buffers,do not wait for anypending/executingcommands. Start overagain.OK。
rs232串口通信协议详解篇一:RS232通讯协议RS232通讯协议基本结构波特率 9600 bit/s,8bit,,位停止,无校验位格式0EBH,地址,命令,长度(,),数据1,---数据,,冗余说明:0EBH为帧起始位长度小于输出端口数冗余=地址+命令+长度+数1+---+数,如果冗余=0EBH,为防止与帧起始位相同,则发送反码,即冗余=14H当接收正确时,1) 在命令1,2,5,6时,回送 0EBH,地址,命令,01H,0FAH,冗余,并执行命令。
2) 在命令3,4,7时,回送相应信息。
当接收不正确时,1) 地址正确,冗余不正确,回送0EBH,地址,命令,101H,0F5H,冗余。
2) 地址不正确,不回送任何信息。
串口通讯—通信协议所谓通信协议是指通信双方的一种约定。
约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。
目前,采用的通信协议有两类:异步协议和同步协议。
同步协议又有面向字符和面向比特以及面向字节计数三种。
其中,面向字节计数的同步协议主要用于DEC 公司的网络体系结构中。
一、物理接口标准1.串行通信接口的基本任务(1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。
在异步通信方式下,接口自动生成起止式的帧数据格式。
在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。
(2)进行串,并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。
所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送2入计算机处理。
因此串并转换是串行接口电路的重要任务。
(3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。
RS232通讯协议模板RS232通讯协议说明:下列表述中,H仅代表数据是十六进制和空格是分隔符。
波特率9600 bit / s ,8bit ,1位停止位,无校验位格式EBH地址,命令,数据长度,数据1,..数据n冗余EBH为帧起始位,以二进制表示为:1110 1011地址:设备的通讯代号,出厂时已设定好,用户不能修改,同一型号的所有设备共用一个相同的地址。
命令:用十六进制数据代表的操作。
数据长度:发送或接收的信息字节数,它只包括数据1到数据n的个数。
冗余:用来判断发送或接收是否正确的信息,在发送时由发送端计算,在回送信息中由设备自动计算。
计算方法为:冗余=地址+命令+数据长度+数1 +…数N如果冗余=EBH则发送反码,即冗余=14H;若冗余有进位,则将进位取消只取低八位即可。
例:冗余=2AH+01H+01H+F3H=1仆H则将进位取消即为冗余 =仆耳在随设备配套的测试程序(CTCOM中,冗余是由测试程序自动计算出。
回送信息当转换器接收命令正确但无此命令时,回送信息为:EBH,地址,命令,01H, F1H,冗余。
当转换器接收命令正确但数据超界时,回送信息为:EBH地址,命令,01H, F2H,冗余。
且不执行命令。
当转换器接收命令正确但有按键时,回送信息为:EBH地址,命令,01H, F3H,冗余。
且不执行命令。
当转换器接收缓冲区数据溢出时,回送信息为:EBH,地址,命令,01H, F4H,冗余。
当转换器接收命令的冗余不正确时,回送信息为:EBH,地址,命令,01H, F5H,冗余。
当转换器接收命令正确但数据长度超过协议规定时,回送信息为:EBH地址,命令,01H, F7H,冗余。
且不执行命令。
当转换器接收命令正确且设备在允许远程控制时,回送信息为:EBH,地址,命令,01H, FAH冗余。
并执行命令。
当转换器接收地址不正确时,不回送任何信息。
设备地址VFT-2*2转换器的地址是59H。
命令命令0作用:查询设备地址和软件版本号格式:EBH,00H, 00H, 0伯,01H,冗余。
RS232通讯协议RS-232是一种常见的串行通信协议,用于在计算机和外部设备之间传输数据。
它于1962年由电子工程师协会(EIA)制定,并在电信领域和工业控制领域得到广泛使用。
RS-232协议规定了电气特性、物理连接和通信过程,使得不同类型的设备能够进行可靠的通信。
在RS-232通信中,每个设备都有一个发送线路(Tx)和一个接收线路(Rx),它们通过一对导线进行连接。
发送方将数据位逐位地发送到接收方,接收方通过接收线路接收这些数据位。
RS-232定义了一种异步传输模式,即数据位之间没有固定的时间间隔,而是由发送方发送时钟信号来同步。
RS-232规定了数据传输的电气特性,包括信号电平和信号极性。
标准的RS-232信号电平为正负12V,其中正电平表示逻辑0,负电平表示逻辑1、数据位逐位地从发送方传输到接收方,接收方通过检测信号电平的变化来恢复数据位的值。
RS-232还规定了数据传输的物理连接方式。
常见的RS-232连接器是DB-9和DB-25两种类型。
DB-9连接器有9个引脚,用于发送线路、接收线路、地线和控制信号的连接。
DB-25连接器有25个引脚,除了上述的连接方式外,还可以提供更多的控制信号。
RS-232协议还规定了数据的传输格式,包括数据位数、校验位和停止位。
常见的数据位数为8位,校验位可以选择奇校验、偶校验或无校验,停止位为1位或2位。
这些参数的设置要保证发送方和接收方一致,以确保正确的数据传输。
总的来说,RS-232通信协议是一种可靠且广泛应用的串行通信协议。
它定义了物理连接、电气特性、数据传输格式和控制信号等方面的规定,使得不同类型的设备能够进行可靠的数据传输。
虽然现在已经有了更快速、更先进的通信协议,但RS-232在许多传统的应用领域仍然被广泛使用。
RS232通信协议详解RS-232(又名EIA-232)是指一种标准,用于串行传输数据。
RS-232 协议是由美国电子工业协会制定的,用来规定计算机、通信设备等之间串行的数据通信标准。
这种协议早期主要是用于计算机与调制解调器的通信,现在则应用广泛。
RS-232协议定义了电气信号、数据格式、波特率及其他物理层面的参数。
它的标准约定了串行通信所使用的数据线是双向的,而且有一定的物理接口规范,常见的接口是DB-9和DB-25接口。
RS-232通信可以采用两段通信方式,分别是同步和异步通信。
同步通信要求发送数据方和接收数据方同步接收和发送数据,需要在传输数据的时候使用时钟信号。
这种通信方式数据传输相对较快但比较麻烦,所以现在一般采用异步通信。
而异步通信则是数据通过起始位、数据位、校验位和停止位进行传输,每个字节的传输是独立的,不需要使用时钟信号,这种通信方式更加简单,但是数据传输速率相对慢一些,通常在115200 bps以下。
关于数据传输,RS-232可以发送ASCII码数据和二进制数据,由于标准协议规定了数据的格式,因此在RC-232协议中每个数据字节是由最少5位,最多8位包括1个奇偶校验位和1个停止位组成。
奇偶校验位可以检测出字节中是否有误,事实上,很多情况下是不需要奇偶校验的,所以可以通过配置省略它。
在RS-232中,DTE(数据终端设备)和DCE(数据通信设备)通信的数据线分为两类:控制线和数据线。
控制线主要用于信号控制,如地线、数据就绪、请求发送、清除发送、时钟等等;而数据线则用于数据的传输。
总之,RS-232是一个用于串行数据通信的标准协议,它定义了通信的物理层面、数据格式和各种参数。
因此,RS-232在很多应用中都有很大的作用,其应用范围广泛,并且可以和许多设备通信,包括计算机、调制解调器、打印机、扫描仪等等。
在从事硬件开发和通信调试方面时需要熟练掌握RS-232协议的应用。
rs232通信协议RS232通信协议是一种标准的串行通信协议,最初由美国电子工业协会制定,广泛应用于计算机和外部设备之间的数据传输。
RS232通信协议规定了数据传输的电气和物理特征,包括数据位、停止位、波特率等。
其中,数据位用于表示每个数据字节中的位数,通常为8;停止位用于表示一个数据字节传输结束的标志位,通常为1;波特率则表示每秒传输的位数。
通过这些规定,RS232通信协议确保了数据在发送和接收端之间的正确传输。
在RS232通信协议中,数据通信的一方称为“主机”,另一方称为“从机”。
主机负责发送数据,从机负责接收数据。
数据的传输通过串行通信线进行,其中TX(传输)线由主机使用,RX(接收)线由从机使用。
为了确保数据的正确传输,RS232通信协议还定义了一些控制信号。
其中,RTS(请求发送)信号由主机使用,表示主机准备好发送数据并请求从机接收;CTS(清除发送)信号由从机使用,表示从机准备好接收数据;DTR(数据终端就绪)信号由主机使用,表示主机处于就绪状态;DSR(数据终端准备好)信号由从机使用,表示从机处于就绪状态;RI(振铃指示)信号表示来电指示;CD(载波检测)信号表示载波检测。
在进行RS232通信时,主机和从机之间需要进行握手协议。
最简单的握手协议是“无握手协议”,主机直接发送数据给从机,从机直接接收数据。
另一种常用的握手协议是“软件握手协议”,主机在发送数据之前先向从机发送RTS信号,从机在接收数据之前先向主机发送CTS信号,以确保主机和从机之间的状态同步。
在实际应用中,RS232通信协议广泛用于计算机和打印机、调制解调器、条码扫描枪等外部设备之间的数据传输,以及计算机和单片机、嵌入式系统等之间的数据传输。
它不仅具有稳定性和可靠性,还能够在不同的硬件平台上实现互操作。
总结起来,RS232通信协议是一种标准的串行通信协议,通过定义数据传输的电气和物理特征以及控制信号,确保了数据在主机和从机之间正确传输。
RS232通信协议简介RS232是一种串行通信协议,它是由美国电子工业协会制定的一套标准,用于在计算机和外部设备之间传输数据。
它是一种经典的通信协议,常被用于串口通信。
RS232特点•点对点通信:RS232协议是一种点对点通信协议,即只能在两个设备之间进行通信,不能实现多个设备同时通信。
•串行传输:RS232协议采用串行传输方式,即数据位逐位地传输,与并行传输相比,串行传输只需使用一根线缆,因此更加节省成本。
•异步通信:RS232协议采用异步通信方式,即数据传输的时钟信号由发送方和接收方的时钟不同步产生,发送端按照一定的协议将数据逐位地发送,接收端则根据协议进行解码。
RS232通信流程RS232通信的流程大致可以分为三个步骤:建立连接、数据传输和断开连接。
1. 建立连接在RS232通信中,建立连接需要确保以下几点:•串口设置:发送方和接收方的串口设置(波特率、数据位、停止位、校验位等)必须一致,以保证数据能够正确传输。
•物理连接:发送方的串口输出引脚(TX)连接到接收方的串口输入引脚(RX),同时发送方的串口输入引脚(RX)连接到接收方的串口输出引脚(TX)。
2. 数据传输一旦建立连接,数据传输可以开始。
数据传输的基本单位是字节,发送方将数据按照一定的顺序和协议逐字节地发送给接收方。
在RS232通信中,数据传输的顺序是由发送方控制的。
发送方按照一定的协议将数据逐字节地发送给接收方,接收方则根据协议进行解码。
3. 断开连接当数据传输完成后,需要断开连接。
断开连接的方式可以是发送一个特定的断开连接指令,或者直接关闭串口。
RS232常见应用RS232通信协议广泛应用于各种领域,如工业控制、通信设备、计算机外设等。
以下是一些常见的RS232应用场景:•串口调试:RS232通信协议可以用于串口调试,通过串口连接计算机和调试工具,可以实现对设备的配置、数据传输和调试等功能。
•数据采集:RS232通信协议可以用于数据采集,通过串口连接采集器和计算机,可以实现对各种传感器数据的采集和处理。
RS232串口通信协议
RS232协议中的数据是以字符为单位进行传输的,每个字符由1个起
始位、5-9个数据位、可选的奇偶校验位和1-2个停止位组成。
起始位用
于标识字符的开始,停止位用于标识字符的结束。
奇偶校验位用于检测数
据传输过程中的错误。
RS232协议还定义了一些控制信号,用于进行数据流控制和设备控制。
其中,RTS(Request to Send)信号用于通知外部设备数据准备就绪,CTS(Clear to Send)信号用于通知计算机外部设备准备好接收数据。
DTR(Data Terminal Ready)信号用于通知外部设备计算机准备好进行通信,DSR(Data Set Ready)信号用于通知计算机外部设备准备好进行通信。
1.简单可靠:RS232协议的物理层和数据链路层设计简单,易于实现
和维护,并且具有较高的可靠性;
2.点对点通信:每条RS232连接只能由两个设备进行通信,其中一个
设备充当主机,另一个设备充当从机;
3.通信距离短:由于RS232协议使用的是差分信号和串行传输方式,
因此通信距离较短,通常不超过50英尺;
4.通信速率灵活:RS232协议支持多种通信速率的调整,以满足不同
应用的需求;
5.数据格式简单:RS232协议中的数据格式简单明确,包括起始位、
数据位、奇偶校验位和停止位,易于编程和解析。
总之,RS232协议是一种简单可靠的串口通信协议,被广泛应用于各个领域。
它的设计简单,易于实现和维护,同时具有灵活的通信速率和简单明确的数据格式,能够满足不同应用的需求。
RS232主从式通讯协议V2.0RS232通讯协议(SG6电源第二版)V2.01 总线结构A 接口方式双线RS 232B 传输方式:异步串行双线半双工,主从应答式。
2 协议说明A 数据格式和波特率:9600bps,n,8,1。
波特率9600,1起始位,8数据位,1停止位,无奇偶校验B 报文结构同步字段命令标识数据长度数据段校验段2字节1字节1字节N字节1字节同步字段2字节(规定为0AAH,055H)命令段1字节具体定义见“命令列表”数据长度段1字节数据段的字节个数,最小值0最大值16。
数据段N字节,N在数据长度段指明。
校验和1字节,本报文内除本字节外,所有字节的累加和,大于255自动溢出,例如,080H+092H=0112H,校验和值为012H。
3 命令列表具体含义见命令详细说明。
命令标识功能说明回应标识回应数据说明081H 查询状态001H 模块状态082H 设置参数002H 设参数应答083H 查询参数003H 模块参数084H 开关机004H 开关机应答(数据长度为0)085H 恢复出厂设置005H 恢复设置应答(数据长度为0)4 命令详细说明A (081H)查询状态(无数据段)Byet0 Byet1 Byet2 Byet3 Byet40AAH 055H 081H 数据长度校验B (001H)回复状态Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet100AAH 055H 001H 数据长度输出电压输出电流故障代码温度校验C (082H)设置参数Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet100AAH 055H 082H 数据长度输出电压输出电流模块地址保护值1 Byet11 Byet12 Byet13 Byet14 Byet15 Byet16保护值1 保护值2 CANOPEN波特率选择校验D (002H)回复设置参数据包Byet0 Byet1 Byet2 Byet3 Byet4 Byet50AAH 055H 002H 数据长度错误标识校验E (083H)查询参数数据包(无数据段)Byet0 Byet1 Byet2 Byet3 Byet40AAH 055H 083H 数据长度校验F (003H)回复模块参数数据包Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet100AAH 055H 082H 数据长度输出电压输出电流模块地址保护值1 Byet11 Byet12 Byet13 Byet14 Byet15 Byet16保护值1 保护值2 CANOPEN波特率选择校验G (084H)开关机(无数据段)Byet0 Byet1 Byet2 Byet3 Byet4 Byet40AAH 055H 084H 数据长度0开机1关机校验F(004H)开关机应答(无数据段)Byet0 Byet1 Byet2 Byet3 Byet40AAH 055H 04H 数据长度校验G(085H)恢复出厂值(无数据段)Byet0 Byet1 Byet2 Byet3 Byet40AAH 055H 085H 数据长度校验H(005H)恢复出厂值应答(无数据段)Byet0 Byet1 Byet2 Byet3 Byet40AAH 055H 005H 数据长度校验5数据格式1)输出电压、电流、充电机温度设置数据电压双字节0.1A/bit 例如:十进制750(十六进制2EE)表示输出电压为75V输出电压范围为0—750(十进制),超过此范围,设置无效。
串口通讯—通信协议添加时间:2006-11-14 作者:未知来源:未知录入:abc d200844 阅读次数:--------------------------------------------------------------------------------所谓通信协议是指通信双方的一种约定。
约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI 七层参考模型中的数据链路层。
目前,采用的通信协议有两类:异步协议和同步协议。
同步协议又有面向字符和面向比特以及面向字节计数三种。
其中,面向字节计数的同步协议主要用于DEC公司的网络体系结构中。
一、物理接口标准1.串行通信接口的基本任务(1)实现数据格式化:因为来自C PU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。
在异步通信方式下,接口自动生成起止式的帧数据格式。
在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。
(2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。
所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。
因此串并转换是串行接口电路的重要任务。
(3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。
(4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。
RS232通讯协议(SG6电源第二版)V2.0
1 总线结构
A 接口方式双线RS 232
B 传输方式:
异步串行双线半双工,主从应答式。
2 协议说明
A 数据格式和波特率:9600bps,n,8,1。
波特率9600,1起始位,8数据位,1停止位,无奇偶校验
B 报文结构
同步字段命令标识数据长度数据段校验段
2字节1字节1字节N字节1字节
同步字段2字节(规定为0AAH,055H)
命令段1字节具体定义见“命令列表”
数据长度段1字节数据段的字节个数,最小值0最大值16。
数据段N字节,N在数据长度段指明。
校验和1字节,本报文内除本字节外,所有字节的累加和,大于255自动溢出,例如,080H+092H=0112H,校验和值为012H。
3 命令列表
具体含义见命令详细说明。
命令标识功能说明回应标识回应数据说明
081H 查询状态001H 模块状态
082H 设置参数002H 设参数应答
083H 查询参数003H 模块参数
084H 开关机004H 开关机应答(数据长度为0)085H 恢复出厂设置005H 恢复设置应答(数据长度为0)
4 命令详细说明
A (081H)查询状态(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4
0AAH 055H 081H 数据长度校验
B (001H)回复状态
Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet10
0AAH 055H 001H 数据长度输出电压输出电流故障代码温度校验
C (082H)设置参数
Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet10
0AAH 055H 082H 数据长度输出电压输出电流模块地址保护值1 Byet11 Byet12 Byet13 Byet14 Byet15 Byet16
保护值1 保护值2 CANOPEN波特率选择校验
D (002H)回复设置参数据包
Byet0 Byet1 Byet2 Byet3 Byet4 Byet5
0AAH 055H 002H 数据长度错误标识校验
E (083H)查询参数数据包(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4
0AAH 055H 083H 数据长度校验
F (003H)回复模块参数数据包
Byet0 Byet1 Byet2 Byet3 Byet4 Byet5 Byet6 Byet7 Byet8 Byet9 Byet10
0AAH 055H 082H 数据长度输出电压输出电流模块地址保护值1 Byet11 Byet12 Byet13 Byet14 Byet15 Byet16
保护值1 保护值2 CANOPEN波特率选择校验
G (084H)开关机(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4 Byet4
0AAH 055H 084H 数据长度0开机1关机校验
F(004H)开关机应答(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4
0AAH 055H 04H 数据长度校验
G(085H)恢复出厂值(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4
0AAH 055H 085H 数据长度校验
H(005H)恢复出厂值应答(无数据段)
Byet0 Byet1 Byet2 Byet3 Byet4
0AAH 055H 005H 数据长度校验
5数据格式
1)输出电压、电流、充电机温度设置数据
电压双字节0.1A/bit 例如:十进制750(十六进制2EE)表示输出电
压为75V
输出电压范围为0—750(十进制),超过此范围,设置无效。
输出电压保护值1、保护值2的范围为0—800,超过此范围,设置无
效。
15 8 7 0
电压高字节电压低字节
电流双字节0.1V/bit 例如:十进制250(十六进制FA)输出电流为
25A
输出电流范围为0—250(十进制),超过此范围,设置无效。
15 8 7 0
电流高字节电流低字节
温度一字节1℃/bit 偏移量:-40 例如:十进制60(十六进制3C)实际温度为:60-40=20℃。
温度的范围为:-40℃--210℃。
超过此范围,应该认为是无效的数据。
2)故障代码(0—正常、1—故障)
Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7
输出电压高输出电
压低
输出电
流高
输出电流
低
过温关机交流异常关机
串口控制
开关机
遥控状态
(开机或
关机)
3)错误标识:(0—正常、1—故障)
Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7
电压设置错误电流设
置错误
地址设
置错误
保护值1
设置错误
保护值2设
置错误
CanOpen波特
率设置错误
保留保留
4)CANOpen波特率选择:
0—1mbps 1—500kbps 2—250kbps 3—125kbps
波特率选择超过此范围设置无效。
5)电源模块地址:
电源地址范围1--10,超过此范围设置无效。
6)电源出厂缺省设置值如下:
SMR地址:1
输出电压:75V
输出电流:25A
保护值1:80V
保护值2:80V
CAN通讯波特率:500Kbps
6其他说明
充电机与主控制器是主从关系,即主控制器为主,电源为从,只有当主控制器向充电机发送指令且数据的校验值正确时,充电机才向主控制器返回数据。
在设置电源输出参数时,最好要连续发送2次设置命令,以确保设置值能够正确的写入单片机的EEPROM存储器中。
EEPROM的写入寿命大约
为100万次。
如果发送的设置数据与上次的设置数据不同,EEPROM将会执行一次写的操作,如果与上次设置的数据相同,将不会执行写操作,因此不要频繁改动设置数据,延长EEPROM的使用寿命。
CAN通讯协议(SG6电源第二版)V2.0 CAN通讯协议采用CAN2.0A的标准,将电源内部工作状态返回给上位机监控程序。
具体内容如下:(多字节发送,高字节在低位,低字节在高位)
通讯波特率:1Mbps、500Kbps、250Kbps、125Kbps(4种任选其一)
帧ID(11bit) 更新时间数据段
0x180+地址100ms Byte0 工作状态(0—工作、1—停止)
Byte1 电源温度
Byte2 故障代码(低字节)(详见上面串口协议中定义的故障代码)
Byte3 故障代码(高字节)(详见上面串口协议中定义的故障代码)
Byte4 输出电流(高字节)
Byte5 输出电流(低字节)
Byte6 输出电压(高字节)
Byte7 输出电压(低字节)
0x280+地址1s Byte0 本机地址
Byte1 开关机设置(0—开机、1—关机)
Byte2 保留(0)
Byte3 保留(0)
Byte4 保留(0)
Byte5 保留(0)
Byte6 保留(0)
Byte7 保留(0)
0x380+地址1s Byte0 输出电压设定值(高字节)
Byte1 输出电压设定值(低字节)
Byte2 输出电流设定值(高字节)
Byte3 输出电流设定值(低字节)
Byte4 输出电压保护1设定值(高字节)
Byte5 输出电压保护1设定值(低字节)
Byte6 输出电压保护2设定值(高字节)
Byte7 输出电压保护2设定值(低字节)。