伺服电机与减速器的连接
- 格式:docx
- 大小:200.94 KB
- 文档页数:2
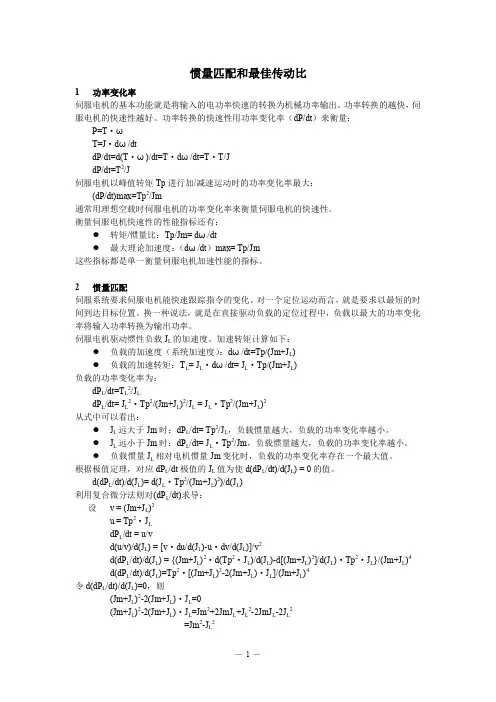
惯量匹配和最佳传动比1 功率变化率伺服电机的基本功能就是将输入的电功率快速的转换为机械功率输出。
功率转换的越快,伺服电机的快速性越好。
功率转换的快速性用功率变化率(dP/dt)来衡量:P=T·ωT=J·dω/dtdP/dt=d(T·ω)/dt=T·dω/dt=T·T/JdP/dt=T2/J伺服电机以峰值转矩Tp进行加/减速运动时的功率变化率最大:(dP/dt)max=Tp2/Jm通常用理想空载时伺服电机的功率变化率来衡量伺服电机的快速性。
衡量伺服电机快速性的性能指标还有:●转矩/惯量比:Tp/Jm= dω/dt●最大理论加速度:(dω/dt)max= Tp/Jm这些指标都是单一衡量伺服电机加速性能的指标。
2 惯量匹配伺服系统要求伺服电机能快速跟踪指令的变化。
对一个定位运动而言,就是要求以最短的时间到达目标位置。
换一种说法,就是在直接驱动负载的定位过程中,负载以最大的功率变化率将输入功率转换为输出功率。
伺服电机驱动惯性负载J L的加速度、加速转矩计算如下:●负载的加速度(系统加速度):dω/dt=Tp/(Jm+J L)●负载的加速转矩:T L= J L·dω/dt= J L·Tp/(Jm+J L)负载的功率变化率为:dP L/dt=T L2/J LdP L/dt= J L2·Tp2/(Jm+J L)2/J L = J L·Tp2/(Jm+J L)2从式中可以看出:●J L远大于Jm时:dP L/dt= Tp2/J L,负载惯量越大,负载的功率变化率越小。
●J L远小于Jm时:dP L/dt= J L·Tp2/Jm,负载惯量越大,负载的功率变化率越小。
●负载惯量J L相对电机惯量Jm变化时,负载的功率变化率存在一个最大值。
根据极值定理,对应dP L/dt极值的J L值为使d(dP L/dt)/d(J L) = 0的值。

750w伺服电机安装尺寸蜗轮蜗杆减速器型号三段:
RV系列蜗轮蜗杆减速机按Q/MD1-2000技术质量标准设计制造。
产品在符合按国家标准GB10085-88蜗杆轮参数基础之上,蜗轮蜗杆减速器吸取国内外最先进科技,独具新颖一格的“方箱型”外结
RV25 RV30 RV40 RV50 RV63 RV75 RV90 RV110 RV130 RV150
NRV25 NRV30 NRV40 NRV50 NRV63 NRV75 NRV90 NRV110 NRV130 NRV150
NMRV25 NMRV30 NMRV40 NMRV50 NMRV63 NMRV75 NMRV90 NMRV110 NMRV130
产品概述:
RV系列蜗轮蜗杆减速机按Q/MD1-2000技术质量标准设计制造。
产品在符合按国家标准GB10085-88蜗杆轮参数基础之上,蜗轮蜗杆减速器吸取国内外最先进科技,独具新颖一格的“方箱型”外结构,箱体外形美观,以优质铝合金压铸而成。
1.机械结构紧凑、体积轻巧、小型高效;
2.热交换性能好,散热快;
3.安装简易、灵活轻捷、性能优越、易于维护检修;
4.传动速比大、扭矩大、承受过载能力高;
5.运行平稳,噪音小,经久耐用;
6.适用性强、安全可靠性大。
RV系列蜗轮减速机目前已广泛应用于冶金、矿山、输送、水利、化工、食品、饮料、纺织、烟草、包装、环保等众多行业和领域工艺装备的机械减速装置,深受用户的好评、是目前现代工业装备实现大速比低噪音、高稳定机械减速传动控制装置的最佳选择。
技术参数:
功率:0.06KW~7.5KW
转矩:2.6N·m~2379N·m
传动比:7.5-100。

第16卷 第2期 精 密 成 形 工 程收稿日期:2023-10-20 Received :2023-10-20基金项目:国家自然科学基金(U2341272,52171076)Fund :National Natural Science Foundation of China (U2341272, 52171076)引文格式:李钦军, 李波, 龚峰, 等. 大面积微结构辊对板热压印装置研发及工艺优化[J]. 精密成形工程, 2024, 16(2): 157-164. LI Qinjun, LI Bo, GONG Feng, et al. Development and Process Optimization of Large Area Micro-structure Roller-to-Plate Hot Stamping Device[J]. Journal of Netshape Forming Engineering, 2024, 16(2): 157-164. *通信作者(Corresponding author )李钦军,李波,龚峰,闫超*(深圳大学 机电与控制工程学院 深圳市高性能特种制造重点实验室,广东 深圳 518060) 摘要:目的 研发一种模块化辊筒对平板类型的微结构热压加工装置,研究不同模具结构下的辊压工艺参数对光学聚合物微结构成形的影响,研究大尺寸的PMMA 样品的翘曲规律。
方法 使用一种基于线接触的扫描连续辊压工艺,分别使用线槽模具、不锈钢网孔模具进行辊压实验,根据实验结果确定最佳工艺参数范围。
结果 在辊筒温度为150~180 ℃、平板温度为25 ℃、辊压压力为200~500 N 和辊压速度为1 mm/s 的工艺条件下,甲基丙烯酸甲酯平板(PMMA )微槽阵列的线槽宽复制度最高可达90%,微圆柱结构在40 mm× 40 mm PMMA 衬底的覆盖率高达95%。
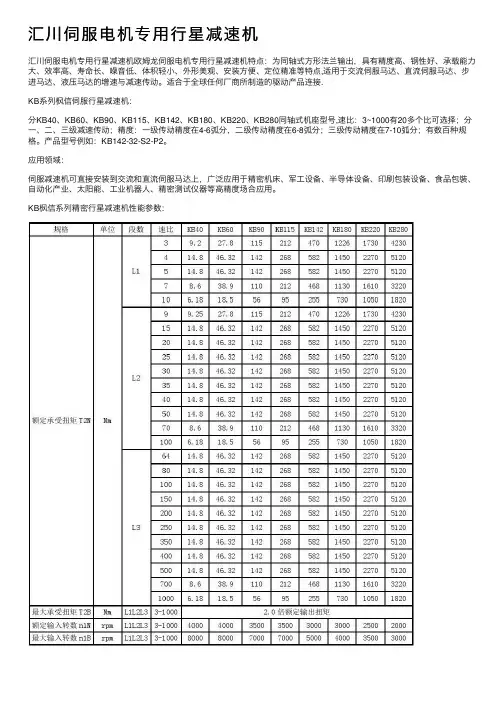
汇川伺服电机专⽤⾏星减速机汇川伺服电机专⽤⾏星减速机欧姆龙伺服电机专⽤⾏星减速机特点:为同轴式⽅形法兰输出,具有精度⾼、钢性好、承载能⼒⼤、效率⾼、寿命长、噪⾳低、体积轻⼩、外形美观、安装⽅便、定位精准等特点,适⽤于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何⼚商所制造的驱动产品连接.KB系列枫信伺服⾏星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速⽐:3~1000有20多个⽐可选择;分⼀、⼆、三级减速传动;精度:⼀级传动精度在4-6弧分,⼆级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应⽤领域:伺服减速机可直接安装到交流和直流伺服马达上,⼴泛应⽤于精密机床、军⼯设备、半导体设备、印刷包装设备、⾷品包裝、⾃动化产业、太阳能、⼯业机器⼈、精密测试仪器等⾼精度场合应⽤。
KB枫信系列精密⾏星减速机性能参数:KB系列精密⾏星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(⼀级传动)L2(⼆级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(⼀级传动)L2(⼆级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(⼀级传动)L2(⼆级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(⼀级传动)L2(⼆级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
当我们在无限憧憬工业机器人时代的时候,你可曾知道,工业机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。
“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。
国内顶尖大学和科研机构几年攻关也只有论文,没有实物。
工业机器人所有核心零部件中,减速机最为关键。
工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。
简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。
一、RV减速机的机械原理德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。
RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
第1减速部…正齿轮减速机构输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。
这是第一减速部。
第2减速部…差动齿轮减速机构直齿轮与曲柄轴相连接,变为第二减速部的输入。
在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。
另外,在外壳内侧仅比RV 齿轮数多一个的针齿,以同等的齿距排列。
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。
此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。
这个转动被输出到第2减速部的轴。
将轴固定时,外壳侧成为输出侧。
二、RV减速机对工业机器人的重要性工业机器人第一关节到第四关节全部使用RV减速机,轻载工业机器人第五关节和第六关节有可能使用谐波减速机。
重载工业机器人所有关节都需要使用RV减速机。
平均而言,每台工业机器人使用4.5台RV减速器。

伺服电机匹配行星减速机的方法
伺服电机匹配行星减速机的方法包括以下步骤:
1. 确定减速器的类型:根据应用需求,选择适合的减速器类型。
伺服电机匹配的行星减速器通常分为直齿、斜齿、方法兰和圆法兰等类型。
2. 确定减速器的规格:减速器的规格通常与伺服电机的功率有关。
根据电机的功率,选择相应规格的行星减速机法兰。
3. 确定减速器的减速比:减速比是根据需要伺服电机达到的效果来确定的。
可以询问技术人员所需的减速比,或者根据减速器扭矩和电机扭矩进行计算。
4. 计算减速器的扭矩:根据电机的工作条件,计算出减速器的输出扭矩。
减速器的额定扭矩应大于或等于电机的额定扭矩乘以减速比。
5. 确定减速器的精度:根据具体工作要求,选择适合的减速器精度等级。
一般来说,用于伺服电机的减速器间隙不应大于15arcmin,等级区分为P1、P2、P0。
6. 考虑其他因素:在选择伺服电机匹配的行星减速机时,还需要考虑其他因素,如减速机的刚性、质量、使用寿命和维护要求等。
综上所述,伺服电机匹配行星减速机的方法需要综合考虑多个因素,包括减速器类型、规格、减速比、扭矩、精度和其他因素。
只有选择合适的减速器才能达到理想的效果。
斜齿轮伺服减速机:是通用性强、组合性好、承载能力高、齿轮间隙小,定位精度高、传动比准确的一种减速器,它不仅很方便地与各家交流伺服电机,直流伺服电机相连接,而且效率高、振动小、允许有高的轴伸径向载荷。
性能与特点:1、齿轮采用优质合金渗碳淬火,齿面硬度高达60±2HRC,齿面磨削精度高达5-6级2、采用计算机修形技术,对齿轮进行预修形,大大提高了减速机的承载能力3、从箱体至内部齿轮,采用完全的模块化结构设计,适合大规模生产及灵活多变的选型4、标准减速机型号按扭矩递减形式划分,与传统的等比例划分相比,更符合客户要求,避免了功率浪费5、采用CAD/CAM设计制造,保证质量的稳定性6、采用多种密封结构,防止漏油7、多方位的降噪措施,确保减速机优良的低噪音性能8、产品安装方式灵活多变,易于客户选用参数:1、规格:PA27/PA37/PA47/PA57/PA67/PAR77/PA87/PA97/PA107/PA1 27/PA147/PA1672、速比:1:4,1:5,1:6,1:8,1:9,1:10,1:12,1:15,1:18,1:22,1:25,1:30,1:35,1:40,1:50,1:60,1:75,1:90,1:100,1:120,1:150,1:200,1:250,1:300, 1:400,1:500,1:600,1:800,1:1000,1:1500,1:2000,1:2500,1:30003、输入转速:1000-4000r/min。
4、输出转矩:50至15000Nm 。
5、电机功率:0.1~250kw。
6、安装形式:立式安装卧式安装。
应用场合:钢铁冶炼、环保设备、输送运输、起重建筑、石油化工、空港码头、木板造纸、玻璃陶瓷、烟草、食品、船舶运输、啤酒饮料、纺织印染、自动电梯、交通桥梁、汽车工业、航空航天、立体停车库与机械动力等精密定位领域。
伺服电机直角行星减速机KBR系列精密伺服直角行星减速机:特点:为方形法兰转角式结构,具有精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、可解决轴向空间限制、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等。
KBR系列精密伺服直角行星减速机:分KBR40、KBR60、KBR90、KBR115、KBR142、KBR180、KBR220、KBR280直角式常用机座型号,速比:3~1000有20多种比速可选择;分一级、二级和三级减速传动;精度:一级传动精度在5-8弧分,二级传动精度在7-10弧分;三级传动精度在9-12弧分;有数百种规格。
产品型号例如:KBR142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备,太阳能、工业机器人、医疗设备、精密测试仪器等高精度场合的应用。
性能及特点:1、行星齿轮的传动介面采用不含保持器之满针滚针轴承,增加接触面积以提高结构刚性及输出扭矩;2、采用3D/PORE的设计分析技术,分别对螺旋齿面作齿形及导程修整,以降低齿轮对啮入及啮出的冲击和噪音,增加齿轮系的使用寿命;3、齿轮材料选用高级的铬钼钒合金钢,经调质热处理至基材硬度30HRC,再利用本厂先进的离子氮化设备将齿轮表面的硬度氮化至840HV,以获得最佳的耐磨耗和耐冲击韧性;4、行星臂架与输出轴采用一体式的结构设计,且输出轴的轴承配置采用大跨距设计确保最大的扭转刚性和输出负载能力;5、使用NYOGEL792D合成润滑油脂,并采用IP65防护等级的密封设计,润滑油不泄露,免维护;6、输入端与马达的连接采用筒夹式的锁紧机构并经动平衡分析,以确保在高输入转速下结合介面的同心度和零背隙的动力传递;7、整支齿轮棒材制作出的太阳齿轮,刚性强,同心度准确;8、独特的马达连接板和轴衬的模组化设计,适用于任何伺服马达;9、齿轮箱表面利用无电解镍处理,马达连接板采用黑色阳极处理,提高环境的耐受性和抗腐蚀能力;10、齿轮箱和内环齿轮采用一体式的设计,结构紧凑、精密度高、输出扭矩.KBR系列精密行星减速机性能参数:KBR系列精密行星减速机转动惯量:。
变频驱动器、伺服驱动器、减速机的区别先谈下变频驱动器与伺服驱动器的区别伺服的基本概念是准确、精确、快速定位。
变频是伺服控制的一个必须的内部环节,伺服驱动器中同样存在变频(要进行无级调速)。
但伺服将电流环速度环或者位置环都闭合进行控制,这是很大的区别。
除此外,伺服电机的构造与普通电机是有区别的,要满足快速响应和准确定位。
现在市面上流通的交流伺服电机多为永磁同步交流伺服,但这种电机受工艺限制,很难做到很大的功率,十几KW以上的同步伺服价格及其昂贵,这样在现场应用允许的情况下多采用交流异步伺服,这时很多驱动器就是高端变频器,带编码器反馈闭环控制。
所谓伺服就是要满足准确、精确、快速定位,只要满足就不存在伺服变频之争。
一、两者的共同点:交流伺服的技术本身就是借鉴并应用了变频的技术,在直流电机的伺服控制的基础上通过变频的PWM方式模仿直流电机的控制方式来实现的,也就是说交流伺服电机必然有变频的这一环节:变频就是将工频的50、60HZ的交流电先整流成直流电,然后通过可控制门极的各类晶体管(IGBT,IGCT等)通过载波频率和PWM调节逆变为频率可调的波形类似于正余弦的脉动电,由于频率可调,所以交流电机的速度就可调了(n=60f/p ,n转速,f频率, p极对数)二、变频器:简单的变频器只能调节交流电机的速度,这时可以开环也可以闭环要视控制方式和变频器而定,这就是传统意义上的V/F控制方式。
现在很多的变频已经通过数学模型的建立,将交流电机的定子磁场UVW3相转化为可以控制电机转速和转矩的两个电流的分量,现在大多数能进行力矩控制的著名品牌的变频器都是采用这样方式控制力矩,UVW每相的输出要加霍尔效应的电流检测装置,采样反馈后构成闭环负反馈的电流环的PID调节;ABB的变频又提出和这样方式不同的直接转矩控制技术,具体请查阅有关资料。
这样可以既控制电机的速度也可控制电机的力矩,而且速度的控制精度优于v/f控制,编码器反馈也可加可不加,加的时候控制精度和响应特性要好很多。
伺服驱动器控制伺服电机原理伺服驱动器控制伺服电机原理1. 什么是伺服驱动器?伺服驱动器是一种用于控制伺服电机的设备,其作用是接收控制信号,并将此信号转换成电机的动作。
伺服电机则是一种特殊的电机,通过伺服驱动器的控制,可以精确地控制电机的位置、速度和加速度等参数。
2. 伺服驱动器的工作原理伺服驱动器通过接收控制信号,使用内部的反馈系统来控制电机。
以下是伺服驱动器的工作原理的一般步骤:•接收控制信号:伺服驱动器会接收一个来自控制器的控制信号,这个信号可以是模拟信号或数字信号。
•信号解码:伺服驱动器会对接收到的信号进行解码,将其转换为电机可以理解的控制命令。
•控制执行:伺服驱动器根据解码后的控制命令,控制电机做出相应的动作。
•反馈检测:伺服驱动器通过内部的反馈系统,检测电机的实际状态,并将其与控制命令进行比较。
•误差计算:通过比较控制命令和实际状态,伺服驱动器计算出误差值,即控制命令与实际状态之间的差距。
•调整控制:根据误差值,伺服驱动器会相应地调整控制命令,使得电机的状态与控制命令尽可能一致。
•循环反馈:上述过程将持续进行,以保持电机状态的稳定性和精确性。
3. 伺服驱动器的特点及应用伺服驱动器具有以下特点:•高精度控制:伺服驱动器通过反馈系统可以实现高精度的电机控制,使得电机能够精确地按照控制命令进行运动。
•快速响应:伺服驱动器能够快速响应控制信号,实现高速运动和快速加减速的要求。
•稳定性:通过持续的反馈和控制调整,伺服驱动器能够稳定地控制电机状态,减少误差和波动。
•灵活性:伺服驱动器支持多种控制模式和参数调整,以适应不同应用场景的需求。
伺服驱动器广泛应用于各种需要精密控制的领域,例如工业机械、自动化设备、机器人等。
其高精度和快速响应的特点使得伺服驱动器适用于对运动精度和速度要求较高的场合。
4. 总结伺服驱动器是一种用于控制伺服电机的设备,通过接收控制信号和内部反馈系统,实现电机的精确控制。
其特点包括高精度控制、快速响应、稳定性和灵活性,广泛应用于各种需要精密控制的领域。
伺服电机和伺服驱动器的使用介绍一、伺服电机• 伺服驱动器的控制原理伺服电机和伺服驱动器是一个有机的整体,伺服电动机的运行性能是电动机及其驱动器二者配合所反映的综合效果。
1、永磁式同步伺服电动机的基本结构图1为一台8极的永磁式同步伺服电动机结构截面图,其定子为硅钢片叠成的铁芯和三相绕组,转子是由高矫顽力稀土磁性材料(例如钕铁錋)制成的磁极。
为了检测转子磁极的位置,在电动机非负载端的端盖外面还安装上光电编码器。
驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
图1 永磁式同步伺服电动机的结构图2 所示为一个两极的永磁式同步电机工作示意图,当定子绕组通上交流电源后,就产生一旋转磁场,在图中以一对旋转磁极N、S表示。
当定子磁场以同步速n1逆时针方向旋转时,根据异性相吸的原理,定子旋转磁极就吸引转子磁极,带动转子一起旋转,转子的旋转速度与定子磁场的旋转速度(同步转速n1)相等。
当电机转子上的负载转矩增大时,定、转子磁极轴线间的夹角θ就相应增大,导致穿过各定子绕组平面法线方向的磁通量减少,定子绕组感应电动势随之减小,而使定子电流增大,直到恢复电源电压与定子绕组感应电动势的平衡。
这时电磁转矩也相应增大,最后达到新的稳定状态,定、转子磁极轴线间的夹角θ称为功率角。
虽然夹角θ会随负载的变化而改变,但只要负载不超过某一极限,转子就始终跟着定子旋转磁场以同步转速n1转动,即转子的转速为:(1-1)图 2 永磁同步电动机的工作原理电磁转矩与定子电流大小的关系并不是一个线性关系。
事实上,只有定子旋转磁极对转子磁极的切向吸力才能产生带动转子旋转的电磁力矩。
因此,可把定子电流所产生的磁势分解为两个方向的分量,沿着转子磁极方向的为直轴(或称d轴)分量,与转子磁极方向正交的为交轴(或称q轴)分量。
显然,只有q轴分量才能产生电磁转矩。
由此可见,不能简单地通过调节定子电流来控制电磁转矩,而是要根据定、转子磁极轴线间的夹角θ确定定子电流磁势的q轴和d轴分量的方向和幅值,进而分别对q轴分量和d轴分量加以控制,才能实现电磁转矩的控制。
设备管理与维修2021翼3(上)传动系统转动惯量与减速比匹配分析袁文胜(江铃汽车股份有限公司,江西南昌330001)摘要:伺服传动系统的选型匹配是加工设备升级改造及更新的重要环节,需要定量计算其转动惯量和加减速扭矩,这对于理解和优化系统结构也有一定促进作用。
通过现场应用实例的定量分析计算,与监控数据验证比较来反映减速比及惯量是否匹配所产生的影响。
关键词:转动惯量;加速扭矩;减速比中图分类号:TM303.5文献标识码:BDOI :10.16621/ki.issn1001-0599.2021.03.420引言电机传动的设计和选型中,准确计算转动惯量和动态扭矩非常困难,但仍需要大致的定量分析。
盲目选用大扭矩电机及增大减速比来放大扭矩安全域量,不仅会增加整个设计硬件成本,还会影响机电系统的响应节拍。
导致大部分能量都利用在加速电机转子上,加减速制动过程能量释放频繁,对放大器制动电阻寿命也有一定影响。
本文通过一个不规范的选型设计电气传动实例,定量计算其所需的加速扭矩,并与运行监控的数据对比,以此说明设计匹配的重要性。
1传动系统结构及运行相关数据一台单轴加工缸盖水孔的组合机床,原有传动系统采用普通异步电机加TJ-64减速机,带动床身主轴箱进行简单的定位加工。
后续将传动系统改造为伺服电机加减速机的传动结构,如图1所示。
传动机构和运行模式的相关数据见表1。
选用力士乐MSK 同步伺服电机,型号为MSK100C-0300-NN-M1-AP2-NNNN ;力士乐Indradrive Cs 系列驱动器,型号为HCS02.1E-W0070-A-03-NNNN ;台湾聚盛VGM 行星齿轮减速机,型号为MF150XL1-10-K-32-130;德国ROTEX 梅花型弹性联轴器,型号为ROTEX-38EN-GJL-25098SHA 椎38-椎45。
2转动惯量及扭矩的计算2.1伺服电机角加速度兹觶motor棕acc =2仔n t =2仔R vp t =325010伊(10)伊(2仔60)=340.3rad/s ,其中,R 是减速比,10;p 是螺距,10mm ;v 是速度,3250mm/min 。
具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外观美观、安装方便、定位精准等特点。
适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品联接。
KF系列精密伺服行星减速机:为方形法兰设计,安装尺寸简单方便。
型号分:KF40、KF60、KF90、KF120、KF160、KF200等常用机座型号。
速比:4~1000有20多种比速可选择;分一、二、三减速传动;精度:一级传动精度在5-10弧分,二级传动精度在7-12弧分;三级传动精度在9-15弧分;有数百种规格。
应用领域:伺服行星减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。
如:精密机床、焊接设备、自动切割设备、包装设备,太阳能、工业机器人、印刷设备、精密测试仪器等自动化数控设备的应用。
性能和特点:KF系列精密伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。
使用免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
KF系列伺服行星减速机性能参数:KF系列伺服行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动) L3(三级传动)200W 70 4-M4 11(F7)35 50(H7) 5 64 126 145 164 400W 70 4-M4 14(F7)35 50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动) L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1500W 145 4-M8 22F7 55 110(H7) 5 130 185 208 231KS50 KS63 KS75 KS90 KS110 KS130 KS150KS精密伺服蜗轮减速机:具有间隙小、效率高、速比大、寿命长、振动低、低噪音、低温升、外观美、结构轻小、安装方便、定位精确等特点,适用于交流伺服马达、直流伺服马达减速传动。
版权声明北京和利时电机技术有限公司保留所有权力说明书的内容参照了相关法律基准和行业基准。
使用产品时,如对本说明书提供的内容有疑问,请向购买产品的销售人员咨询,或致电客户服务热线,或致信本公司邮箱。
由于产品的不断更新升级,和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等文件的权利,提示客户请使用最新版本的说明书。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经许可,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本说明书的著作权,未经许可,不得修改、复制说明书的全部或部分内容。
版本号 07/2015目录产品概要产品特性 (1)型号命名 (1)产品组成 (1)产品铭牌 (2)技术特性 (2)外形尺寸及重量 (4)安装和接线使用和储运环境 (6)安装注意事项 (6)电源端子-接线与配线 (7)编码器反馈连接器CN3 -接线与配线 (8)电机绕组-接线与配线 (8)接线与配线示意图 (9)输入输出连接器CN2 -接线与配线 (10)通讯连接器CN1 -接线与配线 (15)试运行和操作通电前注意事项 (16)操作和显示 (16)运行设定操作流程JOG试机运行 (20)内部速度模式运行 (21)外部速度模式运行 (22)位置模式运行 (22)转矩模式运行 (23)参数汇总说明参数分类描述 (24)控制参数修改要求 (24)D 状态监控参数 (24)F 控制参数 (25)运行和调整运行前检查 (32)增益调整 (32)故障和解决方法故障显示和解决方法对照表 (33)产品概要MSE 系列伺服驱动器以美国TI 公司最新的32位数字处理芯片(DSP )作为核心控制,采用了先进的全数字电机控制算法,完全以软件方式实现了电流环、速度环、位置环的闭环伺服控制,具备良好的鲁棒性和自适应能力,可配合多种规格的伺服电机,适应于需要快速响应的精密转速控制与定位控制的应用系统,如:数控机床、印刷机械、包装机械、造纸机械、塑料机械、纺织机械、工业机器人、自动化生产线等。
伺服电机刹车原理伺服电机是一种能够控制旋转角度和速度的电动机,广泛应用于自动化控制系统中。
而刹车作为伺服电机的重要组成部分,具有保证机械系统安全停止和定位的功能。
本文将从伺服电机和刹车的原理入手,详细介绍伺服电机刹车的工作原理和应用。
一、伺服电机的原理伺服电机是一种能够精确控制转速和位置的电动机。
它通过内置的编码器或传感器实时检测电机转速和位置,并根据控制系统的指令调整电机的运动。
伺服电机通常由电机本体、编码器、控制器和驱动器组成。
1. 电机本体:伺服电机的本体是由转子和定子组成的。
转子是电机的旋转部分,而定子是固定在电机外壳内部的部分。
电机本体通过传递电流来产生转矩和旋转运动。
2. 编码器:编码器是伺服电机的重要组成部分,用于测量电机的转速和位置。
编码器通常分为增量式编码器和绝对式编码器两种类型。
增量式编码器通过计算脉冲数来确定转速和位置,而绝对式编码器能够直接读取电机的转速和位置信息。
3. 控制器:控制器是伺服电机系统的大脑,负责接收来自外部的指令并控制电机的运动。
控制器根据编码器反馈的信号,实时调整电机的转速和位置,以达到控制系统的要求。
4. 驱动器:驱动器是将控制器发出的指令转换为电流信号,驱动电机旋转的装置。
驱动器根据控制器的指令,调整电流的大小和方向,以控制电机的转速和位置。
二、刹车的原理刹车是伺服电机系统中的重要保护装置,用于使机械系统快速停止或保持位置。
刹车通常由刹车器和刹车控制器组成。
1. 刹车器:刹车器是一种能够产生阻碍电机旋转的力矩的装置。
常见的刹车器包括电磁刹车、机械刹车和液压刹车等。
电磁刹车通过施加电磁力使制动器片产生摩擦力矩,从而减速或停止电机的旋转。
机械刹车通过刹车摩擦片和刹车盘之间的摩擦力产生制动力矩。
液压刹车则通过液压系统产生制动力矩。
2. 刹车控制器:刹车控制器是控制刹车装置工作的装置。
它根据控制系统的指令,控制刹车器的开合和制动力矩的大小。
刹车控制器通常与伺服电机的控制器相连接,实现对刹车的精确控制。
一般说来,伺服系统制造商不生产减速机。
因此伺服电及配置的减速机基本上是其它品牌的减速机,这种减速机是专门给伺服电机配套的减速机。
减速机与伺服电机的连接方式:抱紧的方式——伺服电机的输出轴伸入减速机里面,伺服电机与减速机通过法兰连接。
减速机内有个可变形的抱箍,操作减速机上的锁紧螺丝,就可以让抱箍把伺服电机的轴抱紧(笔者手边有一台0.75KW的伺服电机都采用的这种连接方式)。
所以对于这种连接方式来说,伺服电机不要求带键槽(当然带键槽也可以,不过订购带键槽的伺服电机需要的Money和货期都比较长哟@_@)。
减速机与伺服电机的连接方式:通过外置联轴器的的方式进行连接。
这种连接方式采用了外置联轴器,所以需要伺服电及带键槽。
外置联轴器还可以采用柔性联轴器(软轴)——软轴驱动功率一般不超过5.5KW,转速可以达到20000转/分钟。
一般说来,使用得最多、供应商库存最多的是不带刹车和不带键槽的伺服电机,因此要订购带刹车和不带键槽的伺服电机,需要的货期比较长,大概在4周左右。
下面是湖北行星攒动设备有限公司PX90型(4:1)行星齿轮减速机:
台达ASMT07L250BK型伺服电机:
台达ASMT07L250BK型伺服电机和湖北行星攒动设备有限公司PX90型(4:1)行星齿轮减速机的连接:。