PLC编程实例(精选)
- 格式:ppt
- 大小:305.50 KB
- 文档页数:39
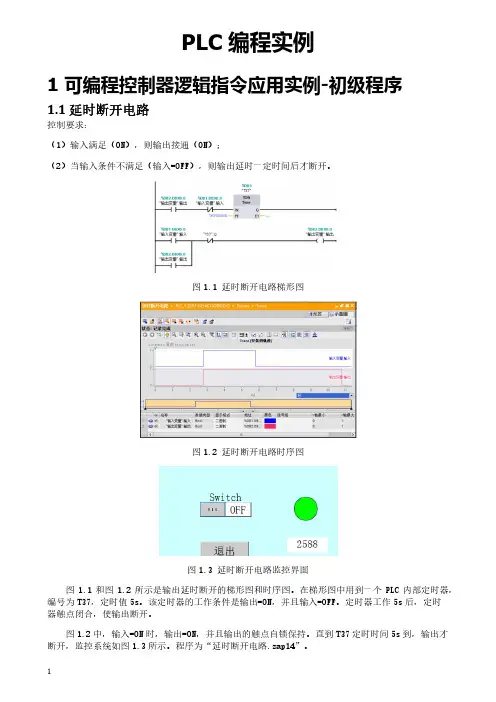
PLC编程实例1 可编程控制器逻辑指令应用实例-初级程序1.1 延时断开电路控制要求:(1)输入满足(ON),则输出接通(ON);(2)当输入条件不满足(输入=OFF),则输出延时一定时间后才断开。
图1.1 延时断开电路梯形图图1.2 延时断开电路时序图图1.3 延时断开电路监控界面图1.1和图1.2所示是输出延时断开的梯形图和时序图。
在梯形图中用到一个PLC内部定时器,编号为T37,定时值5s。
该定时器的工作条件是输出=ON,并且输入=OFF。
定时器工作5s后,定时器触点闭合,使输出断开。
图1.2中,输入=ON时,输出=ON,并且输出的触点自锁保持。
直到T37定时时间5s到,输出才断开,监控系统如图1.3所示。
程序为“延时断开电路.zap14”。
1.2 脉冲信号发生器脉冲信号是PLC中经常使用的控制信号,其实现方法主要有以下两种。
1.2.1 定时器法可以使用STEP7(TIA Portal)的IEC定时器来通过简单的编程产生一个脉冲发生器。
图1.4展示的是如何利用两个“TON”(接通延时定时器)来实现在输出端输出周期性脉冲信号的。
图1.4 两个接通延时定时器实现周期性脉冲信号梯形图“接通延时定时器”指令将使得输出端 Q 延迟一段时间接通,该时间通过 PT 来定义。
实现脉冲发生功能的描述如下:(1)“输入变量”.输入用于激活此脉冲发生器。
(2)“中间变量”.中间2的初始值为“False”,因此,下面一条接通延迟定时器T38“TON”开始计时。
(3)当接通延时时间到达的时候,标志 “中间变量”.中间1将被置位并且“输出变量”.输出获得 “True”信号。
(4)“中间变量”.中间1的“True”信号将触发上面一条T37的“TON”指令开始计时。
(5)当第二次接通延时时间到达的时候,标志“中间变量”.中间2被置位。
(6)“中间变量”.中间2 的 “True”信号将断开下面一条T38 “TON”指令的计时条件并中断该定时器,同时使“中间变量”.中间1被复位。
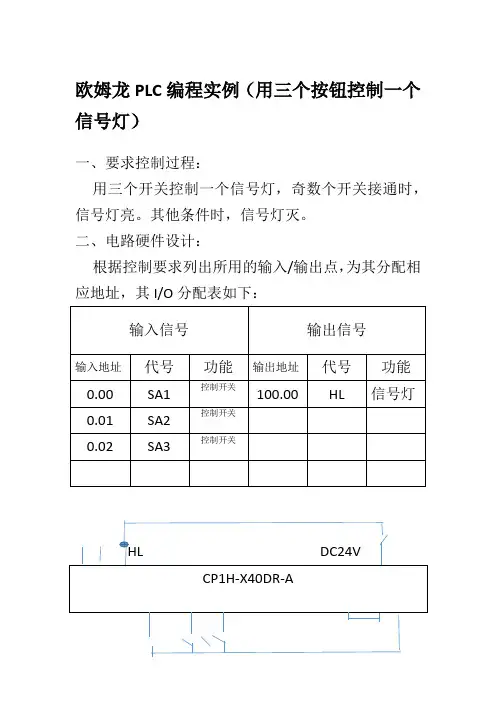
欧姆龙PLC编程实例(用三个按钮控制一个信号灯)
一、要求控制过程:
用三个开关控制一个信号灯,奇数个开关接通时,信号灯亮。
其他条件时,信号灯灭。
二、电路硬件设计:
根据控制要求列出所用的输入/输出点,为其分配相应地址,其I/O分配表如下:
三、编程逻辑思维:本例可通过逻辑代数的计算或采用真值表的方法实现,分析要求列出真值表。
四、程序控制设计:
五、程序的执行过程:
(1).开关SA1闭合,输入信号0.00有效为ON, 输出信号100.00为ON, 信号灯HL亮。
(2)、开关SA2闭合,输入信号0.01有效为ON, 输出信号100.00为ON, 信号灯HL亮。
(3)、开关SA3闭合,输入信号0.02有效为0N, 输出信号100.00为ON. 信号灯HL亮。
(4).开关SA1. SA2. SA3同时闭合,输入信号
0.00/0.01/0.02均有效为ON.输出信号100.00为ON,信号灯HL亮。
(5).在其他情况下,输出信号100.00条件均不足,信号灯HL保持熄灭的状态。
六、编程心得:在这个编程实例程序设计中,通过真值表列出本实例中所有信号灯的工作情况。
逻辑关系清晰,程序简单。
适用于多远程控制,实现一个负载进行多地控制。
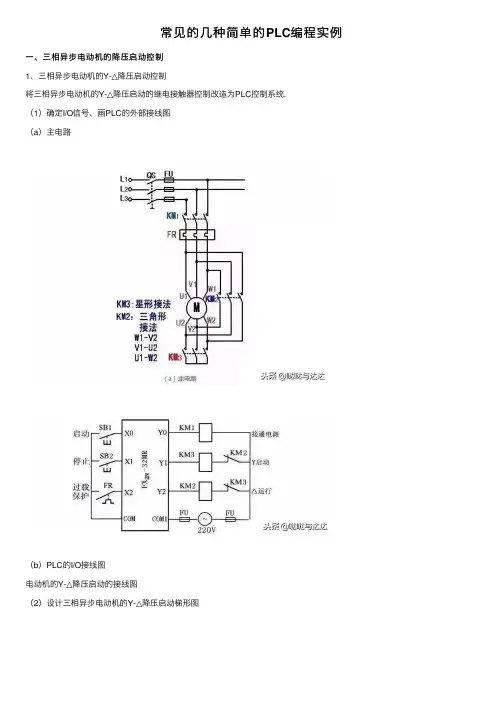
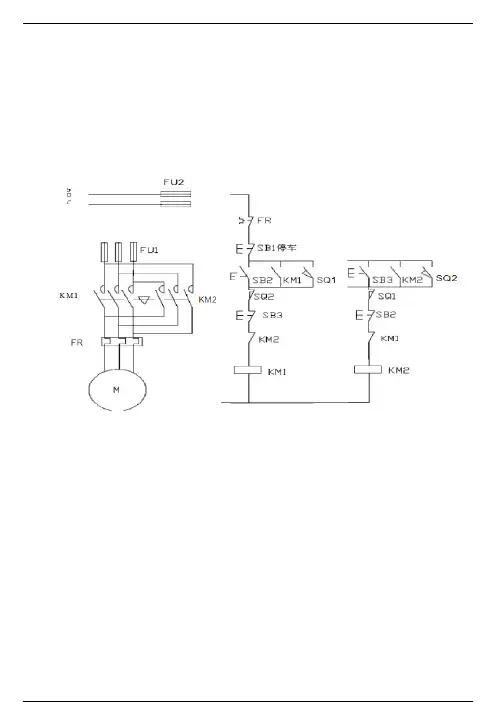
常见的⼏种简单的PLC编程实例⼀、三相异步电动机的降压启动控制1、三相异步电动机的Y-△降压启动控制将三相异步电动机的Y-△降压启动的继电接触器控制改造为PLC控制系统.(1)确定I/O信号、画PLC的外部接线图(a)主电路(b)PLC的I/O接线图电动机的Y-△降压启动的接线图(2)设计三相异步电动机的Y-△降压启动梯形图电动机的Y-△降压启动控制的梯形图2.三相异步电动机的串⾃耦变压器降压启动控制将串⾃耦变压器降压启动的继电接触器控制改造为PLC控制系统:(1)确定I/O信号、画PLC的外部接线图PLC的输⼊信号:启动按钮SB1,停⽌按钮SB2,热继电器常开触点FR。
PLC的输出信号:运⾏接触器KM2、串接⾃耦变压器接触器KM1。
(a)主电路(b)PLC的I/O接线图电动机的⾃耦变压器降压启动的接线图(2)设计三相异步电动机的串⾃耦变压器降压启动梯形图三相异步电动机的串⾃耦变压器降压启动控制梯形图⼆、三相绕线式异步电动机的控制1.三相绕线式异步电动机串电阻启动控制将绕线式异步电动机串电阻启动的继电接触器控制线路改造为PLC控制系统:(1)确定I/O信号、画PLC的外部接线图PLC的输⼊信号:启动按钮SB1,停⽌按钮SB2,热继电器常开触点FR。
PLC的输出信号:电源接触器KM、短接R1接触器KM1、短接R2接触器KM(a)主电路(b) PLC的I/O接线图三相绕线式异步电动机串电阻启动的接线图2.三相绕线式异步电动机串频敏变阻器启动电路将绕线式异步电动机串频敏变阻器启动的继电接触器控制线路改造为PLC控制系统:(1)确定I/O信号、画PLC的外部接线图PLC的输⼊信号:启动按钮SB1,停⽌按钮SB2,热继电器常开触点FR。
PLC的输出信号:运⾏接触器KM1、短接频敏变阻器接触器KM2、接⼊热继电器的中间继电器KA。
(a)主电路(b) PLC的I/O接线图(2)设计三相绕线式异步电动机串频敏变阻器启动梯形图三相绕线式异步电动机串频敏变阻器启动梯形图三、⾃动往返控制将⾃动往返控制的继电接触器控制线路改造为PLC控制系统:(1)确定I/O信号、画PLC的外部接线图PLC的输⼊信号:正转启动按钮SB1,反转启动按钮SB2,停⽌按钮SB3,热继电器常开触点FR、正向前进限位开关SQ1、反向后退限位开关SQ2、前进极限限位开关SQ3、后退极限限位开关SQ4。
PLC必背50编程实例介绍PLC(可编程逻辑控制器)是一种用于控制工业自动化过程的电子设备。
它使用编程语言来控制机器、设备和生产线的运行。
PLC编程实例是为了帮助工程师更好地理解和掌握PLC编程技术而设计的一系列实际案例。
本文将介绍50个必背的PLC 编程实例,涵盖了各种常见的控制任务和应用场景。
1. 点亮LED灯1.1 需求描述在PLC上控制一个LED灯,使其点亮。
1.2 实现步骤1.连接PLC输出口和LED灯。
2.使用PLC编程软件创建一个输出位。
3.将输出位与PLC输出口绑定。
4.编写PLC程序,将输出位设置为高电平。
1.3 代码示例-- 定义输出位Output_LED: BOOL;-- 主程序Main:-- 将输出位设置为高电平Output_LED := TRUE;2. 控制电机转动2.1 需求描述使用PLC控制一个电机按照设定的方向和速度转动。
2.2 实现步骤1.连接PLC输出口和电机控制器。
2.使用PLC编程软件创建两个输出位,一个控制电机的正转,一个控制电机的反转。
3.将输出位与PLC输出口绑定。
4.编写PLC程序,根据需要设置正转或反转输出位。
2.3 代码示例-- 定义输出位Output_Forward: BOOL;Output_Reverse: BOOL;-- 主程序Main:-- 将正转输出位设置为高电平,反转输出位设置为低电平Output_Forward := TRUE;Output_Reverse := FALSE;3. 按钮控制输出3.1 需求描述使用PLC控制一个输出位,通过按下按钮进行开关控制。
3.2 实现步骤1.连接PLC输入口和按钮。
2.连接PLC输出口和负载(如灯、电机等)。
3.使用PLC编程软件创建一个输入位和一个输出位。
4.将输入位与PLC输入口绑定,将输出位与PLC输出口绑定。
5.编写PLC程序,根据输入位的状态来控制输出位。
3.3 代码示例-- 定义输入位Input_Button: BOOL;-- 定义输出位Output_Load: BOOL;-- 主程序Main:-- 当按钮被按下时,将输出位设置为高电平;否则,将输出位设置为低电平IF Input_Button THENOutput_Load := TRUE;ELSEOutput_Load := FALSE;END_IF;结论本文介绍了PLC必背的50个编程实例,涵盖了点亮LED灯、控制电机转动、按钮控制输出等常见的PLC控制任务。
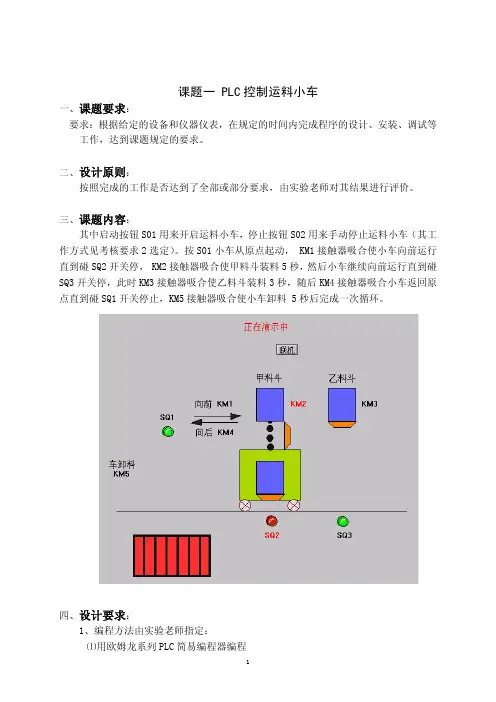
课题一 PLC控制运料小车一、课题要求:要求:根据给定的设备和仪器仪表,在规定的时间内完成程序的设计、安装、调试等工作,达到课题规定的要求。
二、设计原则:按照完成的工作是否达到了全部或部分要求,由实验老师对其结果进行评价。
三、课题内容:其中启动按钮S01用来开启运料小车,停止按钮S02用来手动停止运料小车(其工作方式见考核要求2选定)。
按S01小车从原点起动, KM1接触器吸合使小车向前运行直到碰SQ2开关停, KM2接触器吸合使甲料斗装料5秒,然后小车继续向前运行直到碰SQ3开关停,此时KM3接触器吸合使乙料斗装料3秒,随后KM4接触器吸合小车返回原点直到碰SQ1开关停止,KM5接触器吸合使小车卸料 5秒后完成一次循环。
四、设计要求:1、编程方法由实验老师指定:⑴用欧姆龙系列PLC简易编程器编程⑵用计算机软件编程2、工作方式:A.小车连续循环与单次循环可按S07自锁按钮进行选择,当S07为“0”时小车连续循环,当S07为“1”时小车单次循环;B.小车连续循环,按停止按钮S02小车完成当前运行环节后,立即返回原点,直到碰SQ1开关立即停止;当再按启动按钮S01小车重新运行;C.连续作3次循环后自动停止,中途按停止按钮S02则小车完成一次循环后才能停止;3、按工艺要求画出控制流程图;4、写出梯形图程序或语句程序;5、用欧姆龙系列PLC简易编程器或计算机软件进行程序输入;6、在考核箱上接线,用电脑软件模拟仿真进行调试。
五、输入输出端口配置:输入设备 输入端口编号 接考核箱对应端口启动按钮S01 0000 SO1停止按钮S02 0001 SO2开关SQ1 0002 电脑和PLC自动连接开关SQ2 0003 电脑和PLC自动连接开关SQ3 0004 电脑和PLC自动连接选择按钮S07 0005 S07输出设备 输出端口编号 接考核箱对应端口向前接触器KM1 1000 H01甲卸料接触器KM2 1001 H02乙卸料接触器KM3 1002 H03向后接触器KM4 1003 H04车卸料接触器KM5 1004 H05六、问题:小车工作方式设定:A.小车连续循环与单次循环可按S07自锁按钮进行选择,当S07为“0”时小车连 续循环,当S07为“1”时小车单次循环;B.小车连续循环,按停止按钮S02小车完成当前运行环节后,立即返回原点,直到 碰SQ1开关立即停止;当再按启动按钮S01小车重新运行;C.连续作3次循环后自动停止,中途按停止按钮S02小车完成一次循环后才能停止。
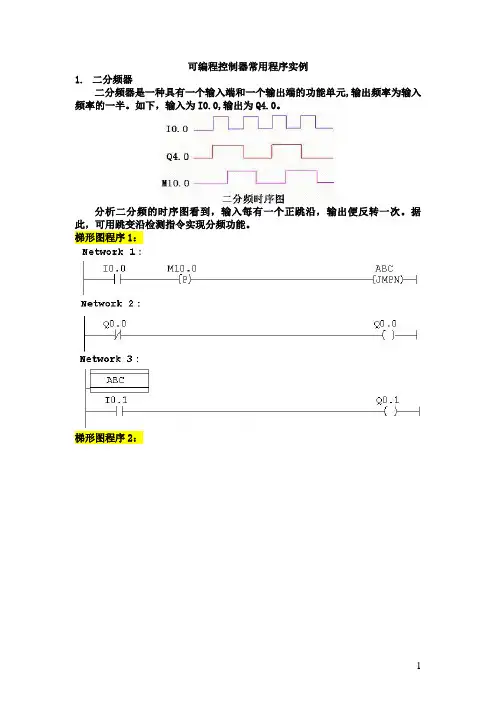
可编程控制器常用程序实例1.二分频器二分频器是一种具有一个输入端和一个输出端的功能单元,输出频率为输入频率的一半。
如下,输入为I0.0,输出为Q4.0。
分析二分频的时序图看到,输入每有一个正跳沿,输出便反转一次。
据此,可用跳变沿检测指令实现分频功能。
梯形图程序1:梯形图程序2:梯形图程序3:2.启动和自锁程序程序功能:输入X0闭合时,输出Y0闭合且自锁。
只有在X1闭合时,其动断触点打开,Y0断开。
其时序图如下:梯形图程序:3.优先程序优先程序执行时,能在多个输入信号中仅接收最先一个输入信号作出反映,其后的输入信号不接收。
此原则常用于抢答器中。
梯形图程序:4.灯泡控制程序一盏灯泡由一个按钮来控制,已知第一次按下按钮,灯泡亮,第二次按下按钮,灯光灭。
(一)PLC接线图(三)梯形图程序5.控制传送带一个由电气启动的传送带,在传送带的起点有两个按钮开关:用于START 的S1和STOP的S2。
在传送带的尾部也有两个按钮开关:用于START的S3和STOP的S4。
可以从任何一端起动或停止传送带。
另外,当传送带上的物件到达末端时,传感器S5使传送带停机。
(一)PLC接线图(二)定义符号地址(三)梯形图程序6.传送带定位控制一电动机带动一个传送带运动,要求移动传送带向前或向后到达某一确定的位置,其结构示意图如下,为了正确定位该传送带,有时需要按下向后(REV)或向前(FWD)按钮进行手动调整。
梯形图程序一旦有按钮按下,立即驱动输出,电动机运转一个扫描周期。
这也意味着按钮时间长短与电动机驱动的时间没有关系。
7.检测传送带的方向装备有两个光电传感器(PEB1和PEB2)的传送带,该设计能够检测传送带上物件的运动方向,并通过左右两端的指示灯(LEFT灯和RIGHT灯)显示。
(一)PLC接线(二)定义符号地址(三)梯形图程序8.按钮指示灯练习第一次按按钮指示灯亮,第二次按按钮指示灯闪亮,第三次按下按钮指示灯灭,如此循环,试编写其PLC控制的LAD程序。
一、小车往返运动用S7-200实现小车往返的自动控制 ,控制过程为按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。
如此的往返运动,直到当按下停车按钮后小车停止运动。
▲电气接线图I/O分配表梯形图程序PLC接线图程序调试及结果分析▲控制平台操作面板当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示 灯 Q0.0 亮)。
当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f,模拟SQ2被压下)接通,此时小车左行(指示灯Q0.0灭,指示灯Q0.1亮),当运行到左边碰到左限位SQ1即i0.3(鼠标点击i0.3f)接通,此时小车又往右运行(指示灯Q0.1灭,指示灯Q0.0亮)。
如此往返运动下去直到按下SB1即i0.2(鼠标点i0.2f)接通,小车停止运行。
附:二、闪光电路当按下启动按钮后,要求在两秒钟内有一秒亮有一秒灭,如此反复,灯一闪一闪 发光。
I/O分配表梯形图程序PLC接线图程序调试及结果分析把编写好的程序下载到西门子s7-200PLC中进行调试。
观察运行结果和实验要求是否相同。
通过在线控制面板进行调试,当按下在线控制面板上的I0.0f(即 I0.0接通)此时Q0.0有输出,Q0.0所接负载灯就亮,同时启动定时器T37开始计时, 当计时一秒后因T37动作,其常闭触点断开,所以Q0.0无输出,所接负载灯灭。
灯灭的同时启动定时器 T38,T38 计时一秒后,把串联在定时器T37的常闭触点断开,所以T37复位,T37常闭触点恢复常闭。
此时Q0.0 又有输出, 所接负载灯又亮。
这样,输出Q0.0上所接的负载灯以接通一秒,断开一秒频率不停的闪烁,直到按下在线控制面板上的 I0.1f(即I0.1接通),闪光电路不在继续工作。
若想改变灯闪烁的频率只要改变定时器的时间就能够达到改变要求。
PLC 编程实例PLC 经典练习第二章一 第2章 基本逻辑控制图2-1 交通信号灯控制PLC 配置示意图C P U输出单元停止I0.2启动I0.1 东西人行道红Q1.3东西人行道绿Q1.2 南北人行道红Q1.1 南北人行道绿Q1.0 东西主车道红Q0.7 东西主车道黄Q0.6 东西主车道直行绿Q0.5 东西主车道左转绿Q0.4 南北主车道红Q0.3 南北主车道黄Q0.2 南北主车道直行绿Q0.1 南北主车道左转绿Q0.00 10 13 40 4345 55 58 85 8890 (秒)I0.1Q0.0Q0.1Q0.2Q0.3Q1.3Q1.2Q0.4Q0.5Q0.6Q0.7Q1.1Q1.0图2-2 交通信号灯系统正常工作时序图I0.1M0.2Q0.1 Q0.2 T1T1 T3T8T9(3S )T8(30S )T7 T5 T4T6(2S )T7(10S )M0.2M0.1T1T5(3S )T4(30S )T3(10S )T1(45S )T2(45S )I0.2M0.1M0.1启停控制Q0.4 Q0.5M0.2严重故障M0.1T2红灯工作延时东西左转绿灯工作延时东西直行绿灯工作延时东西绿灯闪烁延时东西黄灯工作延时南北左转绿灯工作延时周期循环控制南北直行绿灯工作延时南北绿灯闪烁延时...T12(0.5S )T11M0.1T12T9T10(2S )南北黄灯工作延时T11闪烁频率设定T5T6T5T4T3T4Q0.5Q0.3T3Q0.4T9T10 T8T9T11T7T8Q0.1Q0.7T1Q0.3Q0.7M0.2M0.1T1东西主干道红灯南北主干道红灯T7Q0.0南北主干道左转绿灯南北主干道直行绿灯南北主干道绿闪Q0.2南北主干道黄灯东西主干道左转绿灯T11Q0.6东西主干道直行绿灯东西主干道绿闪东西主干道黄灯图2-3 实现主干道信号灯控制的梯形图T4T3Q0.1 T14(3S )T4T3M0.3T8T7T9T8 T14 M0.4东西人行道非红灯T8T7M0.4 Q1.3东西人行道红灯T9T11T8T14 Q1.2东西人行道绿灯东西人行道绿灯闪Q1.1南北人行道红灯M0.3南北人行道非红灯T5T4T13Q0.5T13(3S )南北人行道绿灯延时东西人行道绿灯延时T5T4Q1.0T11T13 南北人行道绿灯南北人行道绿灯闪图2-4 五层电梯控制PLC 配置图1上I1.6 4上I2.15下I1.5 2下I1.2 五层I1.1 一层I0.5 C P U输入单元输出单元五层I0.4 一层I0.0 慢速Q0.3快速Q0.2 电机反转Q0.1电机正转Q0.0 楼层监测 楼层选择2-5层下1-4层上...M0.7 M0.5 M0.4 M0.3 M0.2 M0.6M1.2I0.6M0.2M0.7 到2层指令M1.2M0.6M1.1M0.5M0.4M0.3M0.2I0.0I0.1M0.1M0.1电梯到1层I0.1 I0.2 电梯到2层I0.0I0.2 I0.3 电梯到3层I0.1I0.3 I0.4 电梯到4层I0.2I0.4 I0.3电梯到5层I0.5M0.1到1层指令M1.1...M0.2 M0.7 M2.2M0.6 M2.1I1.2M0.22层向下指令M2.1M0.7 M2.0I1.6M0.11层向上指令M2.0M0.6 M1.5I1.1 M0.5M0.7到5层指令M1.5M0.6 M1.4I1.0 M0.4M0.7到4层指令M1.4M0.6 M1.3I0.7 M0.3M0.7到3层指令M1.3I1.72层向上指令M2.2M0.6M2.7I1.5 M0.5 5层向下指令M2.7M2.6I2.1 4层向上指令M2.6M0.4 M0.7M0.6M2.5I1.4 M0.4 4层向下指令M2.5M2.4I2.0 3层向上指令M2.4M0.3 M0.7M0.6M2.3I1.3M0.33层向下指令M2.3M1.1 M2.0M1.2 M2.2M2.1M2.4M1.3 M2.3M2.6M1.4 M2.5M1.5 M2.7M0.3 M0.4 M0.5向上到3层M3.3M0.4 M0.5向上到4层M3.4M0.5向上到5层M3.5M0.2 M0.3 M0.4 M0.5向上到2层M3.2M0.1 M0.2 M0.3 M0.4 M0.5M3.1向上到1层...M0.1向下到1层M1.1 M2.0M4.1M2.2M0.1 M0.2向下到2层M1.2 M2.1M4.2M2.4M0.1 M0.2 M0.3向下到3层M1.3 M2.3M4.3M2.6M1.4 M2.5M0.1 M1.5 M2.7M0.2 M0.3 M0.4 M0.5M1.6电梯离开楼层M0.1 向下到4层M4.4M0.2 M0.3 M0.4M0.1 M0.2 M0.3 M0.4 M0.5 M4.5向下到5层...M4.5M4.4M4.3M4.2M3.2 M3.3 M3.4 M0.6M3.5M1.7M4.1M1.7M1.6M3.2M3.1M3.3M3.4M3.5M0.7电梯向上指令M0.6M3.1换速指令M0.2M0.3M0.4M0.7...图2-5 实现五层电梯换向和换速控制的梯形图M4.3M4.2M4.1M4.5M0.6电梯向下指令M4.4M0.7Q0.3 Q0.1M3.0Q0.1Q0.0 电梯向下M0.7 M3.0Q0.3 Q0.0Q0.1 电梯向上M0.6 Q0.0Q0.1Q0.0Q0.2电梯慢速Q0.3M3.0 Q0.3电梯快速Q0.2M0.7M0.6M1.7 电梯快速指令M3.0...图2-6 星—角降压启动电机控制原理图图2-7 电机控制PLC 配置图电动机星形接触器过热保护主接触器A B CF RM电源开关角形接触器1号过热动作2号主开关合1号主开关合2号停止I0.4 2号启动I0.3 1号反转I0.2 C P U输入单元输出单元1号正转I0.1 1号停止I0.0 2号星形合Q0.3 2号主接触器合Q0.21号电机反转Q0.1 1号电机正转Q0.0 2号过热动作2号角形合Q0.4...图2-8 实现电机控制的I1.2Q0.0正转控制I0.2 Q0.0T1I0.0 M0.0Q0.1反转控制I0.1 Q0.1T2I0.0 M0.0反转延时T2(1.5S )I0.2正转延时T1(1.5S )I0.1M0.0允许操作I1.1I1.01号电机控制程序2号电机控制程序M0.1允许操作I1.3T4(1.5S )Q0.4Q0.2转换延时Q0.3 角形接触器合T3(8S )Q0.3I0.3Q0.2Q0.2主接触器合I0.4 M0.1Q0.2星形延时Q0.4 T3 Q0.4 星形接触器合Q0.4 Q0.4T4 Q0.3...梯形图。
python plc编程实例Python PLC编程实例。
Python是一种流行的编程语言,它可以用于各种不同的应用领域,包括工业自动化。
在工业控制系统中,PLC(可编程逻辑控制器)是一种常见的设备,用于控制各种生产过程。
本文将介绍如何使用Python编程语言来编写PLC控制程序的实例。
首先,我们需要安装Python的PLC编程库,例如pyplc库。
这个库提供了一些用于与PLC通信的函数和类。
我们可以使用这些函数和类来读取和写入PLC的输入和输出,以及执行其他控制任务。
接下来,我们可以创建一个简单的PLC控制程序的示例。
假设我们有一个PLC控制一个简单的流水线,流水线上有一个传感器检测产品是否到达,如果产品到达,则需要打开一个阀门,否则关闭阀门。
我们可以使用Python编写以下代码来实现这个控制逻辑:python.from pyplc import PLC.# 创建PLC对象。
plc = PLC()。
# 读取传感器状态。
sensor_status = plc.read_input('sensor')。
# 控制阀门。
if sensor_status == 1:plc.write_output('valve', 1)。
else:plc.write_output('valve', 0)。
在这个示例中,我们首先创建了一个PLC对象,然后读取了传感器的状态,并根据传感器的状态来控制阀门的开关。
这个示例展示了如何使用Python编写简单的PLC控制程序。
当然,实际的PLC控制程序可能会更加复杂,涉及到更多的输入和输出,以及更复杂的控制逻辑。
但是使用Python编程语言可以让我们更加灵活地实现这些控制逻辑,同时也可以利用Python丰富的库来处理数据和进行其他任务。
总之,Python PLC编程实例展示了如何使用Python编程语言来编写简单的PLC控制程序,这为工业自动化领域提供了更多的可能性和灵活性。
三菱PLC西门子PLC PLC编程实例之搅拌自动定时搅拌如图33-1所示为一台搅拌器,它用于搅拌两种液体,初始状态液缸中无液体,电动机图33" 搅持器示意图工作时,按下启动按钮, A B两阀同时得电打开,开始进料。
A阀30s后关闭,B阀继续放料,当液位达到传感器2时,搅拌电动机启动,进行液体搅拌。
当液位达到传感器3时,B阀关闭。
5min后,搅拌电动机停止。
同时,出料阀C打开,放料。
当液位低于传感器1时,再延时10s关闭出料阀C,完成一个工作周期。
该系统要求有单周期工作,连续工作两种工作方式。
单周期即按启动按钮后,只完成上述一个工作周期,连续工作为反复执行上述单周期工作过程。
控制方案设计1. 输入/输出元件及控制功能如表33-1所示,介绍了实例33中用到的输入/输岀元件及控制功能-j~xu 冲胡Y! J Itfd(v^)灯州(2)州K10Q33-2所示。
PLC 炊元件元件立字爵号元ft « »控曲功能X0 SB投捋盟启动X) SQImm&s 1補忡” 1想劃 X2 SQ2浹荷姑腐耦2潘需1检蔺 )0 5Q3濱位3检测X4SA 联H 境或单期期工咋方式逸黑Y0YV1 屯盛鶴址圈1 担制进科A 电世幽 9 rtf¥1 YV2 电出間娃囲2桂制进料B 电阳肝Y2 YVJ起班筒胡曲3¥3KM桎财撞胖电动机2. 电路设计搅拌器自动定时搅拌 PLC 接线图和状态转移图如图(a )按打黯 PI crtwiK-图33-2搅徉器白动定时搅拌3. 控制原理PLC 运行时,初始化脉冲 M8002使状态器SO 置位。
按下启动按钮 XO, S20置位,丫0、Y1得电,A 、B 阀同时打开进料,定时器 TO 延时30s 断开Y0, A阀关闭、B 阀继续,当液位达到传感器 2时,Y3得电搅拌电动机启动进行预搅拌,当液位达到传感器 3时,X3动作使S21置位,丫1失电B 阀关闭,Y3仍得电,搅拌电动机继续 搅拌300s , T1动作使S22置位,丫3失电,搅拌电动机停止, 丫2得电,C 阀打开,排放揽拌好的液料,当液位下降到传感器 1以下时,X1常闭接点闭合,T2得电延时将剩余的液料放完,10s后结束。