西门子PLC指令教程 应用指令
- 格式:ppt
- 大小:633.00 KB
- 文档页数:81
第1章位逻辑指令1.1 LD指令:载入常开触点 11.2 A指令:串联常开触点 21.3 O指令:并联常开触点 31.4 LDN指令:载入常闭触点 41.5 AN指令:串联常闭触点 51.6 ON指令:并联常闭触点 61.7 LDI指令:立即载入常开触点71.8 AI指令:串联立即常开触点81.9 OI指令:并联立即常开触点91.10 LDNI指令:载入立即常闭触点101.11 ANI指令:串联立即常闭触点111.12 ONI指令:并联立即常闭触点131.13 NOT指令:改变使能位输入状态141.14 EU指令:上升边缘检测151.15 ED指令:下降边缘检测161.16 ALD指令:触点块串联171.17 OLD指令:触点块并联181.18 LPS、LRD、LPP指令:逻辑堆栈操作191.19 =指令:线圈输出211.20 =|指令:立即线圈输出221.21 S指令:线圈置位231.22 SI指令:线圈立即置位241.23 R指令:线圈复位251.24 RI指令:线圈立即复位261.25 NOP指令:空操作271.26 X指令:异或操作28第2章比较指令2.1 LDB=指令:载入字节等于302.2 AB=指令:与运算字节等于312.3 OB=指令:或运算字节等于322.4 LDB指令:载入字节不等于332.5 AB指令:与运算字节不等于342.6 OB指令:或运算字节不等于352.8 AB=指令:与运算字节大于或等于37 2.9 OB=指令:或运算字节大于或等于39 2.10 LDB=指令:载入字节小于或等于40 2.11 AB=指令:与运算字节小于或等于41 2.12 OOB=指令:或运算字节小于或等于42 2.13 LDB指令:载入字节大于432.14 AB指令:与运算字节大于442.15 OB指令:或运算字节大于452.16 LDB指令:载入字节小于462.17 AB指令:与运算字节小于472.18 OB指令:或运算字节小于482.19 LDW=指令:载入字等于492.20 AW=指令:与运算字等于502.21 OW=指令:或运算字等于522.22 LDW指令:载入字不等于532.23 AW指令:与运算字不等于542.24 OW指令:或运算字不等于552.25 LDW=指令:载入字大于或等于562.26 AW=指令:与运算字大于或等于57 2.27 OW=指令:或运算字大于或等于58 2.28 LDW=指令:载入字小于或等于602.29 AW=指令:与运算字小于或等于61 2.30 OW=指令:或运算字小于或等于62 2.31 LDW指令:载入字大于632.32 AW指令:与运算字大于642.33 OW指令:或运算字大于652.34 LDW指令:载入字小于672.35 AW指令:与运算字小于682.36 OW指令:或运算字小于692.37 LDD=指令:载入双字等于702.38 AD=指令:与运算双字等于712.39 OD=指令:或运算双字等于722.40 LDD指令:载入双字不等于732.41 AD指令:与运算双字不等于742.42 OD指令:或运算双字不等于762.43 LDD=指令:载入双字大于或等于77 2.44 AD=指令:与运算双字大于或等于782.46 LDD=指令:载入双字小于或等于802.47 AD=指令:与运算双字小于或等于812.48 OD=指令:或运算双字小于或等于822.49 LDD指令:载入双字大于832.50 AD指令:与运算双字大于842.51 OD指令:或运算双字大于852.52 LDD指令:载入双字小于872.53 AD指令:与运算双字小于882.54 OD指令:或运算双字小于892.55 LDR=指令:载入实数等于902.56 AR=指令:与运算实数等于912.57 OR=指令:或运算实数等于922.58 LDR指令:载入实数不等于932.59 AR指令:与运算实数不等于942.60 OR指令:或运算实数不等于952.61 LDR=指令:载入实数大于或等于962.62 AR=指令:与运算实数大于或等于972.63 OR=指令:或运算实数大于或等于982.64 LDR=指令:载入实数小于或等于1002.65 AR=指令:与运算实数小于或等于1012.66 OR=指令:或运算实数小于或等于1022.67 LDR指令:载入实数大于1032.68 AR指令:与运算实数大于1042.69 OR指令:或运算实数大于1052.70 LDR指令:载入实数小于1062.71 AR指令:与运算实数小于1072.72 OR指令:或运算实数小于108第3章转换指令3.1 BTI指令:字节转换至整数1103.2 ITB指令:整数转换至字节1113.3 ITD指令:整数转换至长整数1123.4 ITS指令:整数转换至字符串1133.5 DTI指令:长整数转换至整数1153.6 DTR指令:长整数转换至实数1163.7 DTS指令:长整数转换至字符串1173.8 ROUND指令:取整为长整数1193.9 TRUNC指令:截断为长整数1203.10 RTS指令:实数转换至字符串1213.11 BCDI指令:BCD码转换为整数1233.12 IBCD指令:整数转换为BCD码1243.13 ITA指令:整数转换至ASCII码1253.14 DTA指令:长整数转换至ASCII码1273.15 RTA指令:实数转换至ASCII码1293.16 ATH指令:ASCII码转换至十六进制数字1313.17 HTA指令:十六进制数字转换至ASCII码1333.18 STI指令:字符串转换至整数1343.19 STD指令:字符串转换至长整数1363.20 STR指令:字符串转换至实数1373.21 DECO指令:解码1383.22 ENCO指令:编码1403.23 SEG指令:七段显示转换141第4章计数器指令4.1 CTU指令:向上计数1434.2 CTD指令:向下计数1454.3 CTUD指令:双向计数1464.4 HDEF指令:定义高速计数器1484.5 HSC指令:高速计数器150第5章浮点型数学运算指令5.1 +R指令:实数加1535.2 -R指令:实数减1545.3 *R指令:实数乘1565.4 /R指令:实数除1575.5 SQRT指令:求平方根1595.6 SIN指令:求正弦值1605.7 COS指令:求余弦值1615.8 TAN指令:求正切值1625.9 LN指令:求自然对数1635.10 EXP指令:求指数值164第6章整型数学运算指令6.1 +I指令:整数加1656.2 +D指令:长整数加1666.3 ?I指令:整数减1686.4 ?D指令:长整数减1696.5 MUL指令:整数与长整数相乘1716.6 *I指令:整数乘1726.7 *D指令:长整数乘1736.8 DIV指令:整数与长整数相除1756.9 /I指令:除以整数1766.10 /D指令:除以长整数1776.11 INCB指令:递增字节1796.12 INCW指令:递增字1806.13 INCD指令:递增双字1816.14 DECB指令:递减字节1836.15 DECW指令:递减字1846.16 DECD指令:递减双字185第7章中断指令7.1 CRETI指令:从中断(INT)有条件返回1877.2 ENI指令:启用中断1887.3 DISI指令:禁止中断1897.4 ATCH指令:中断连接1907.5 DTCH指令:中断分离1917.6 CEVNT指令:清除中断事件192第8章字逻辑指令8.1 INVB指令:取反字节1948.2 INVW指令:取反字1958.3 INVD指令:取反双字1968.4 ANDB指令:与运算字节1978.5 ANDW指令:与运算字1998.6 ANDD指令:与运算双字2008.7 ORB指令:或运算字节2018.8 ORW指令:或运算字2038.9 ORD指令:或运算双字2048.10 XORB指令:异或运算字节2058.11 XORW指令:异或运算字2078.12 XORD指令:异或运算双字208第9章移动指令9.1 MOVB指令:移动字节2109.2 MOVW指令:移动字2119.3 MOVD指令:移动双字2129.4 MOVR指令:移动实数2139.5 BMB指令:成块移动字节2149.6 BMW指令:成块移动字2159.7 BMD指令:成块移动双字2179.8 SWAP指令:交换字节2189.9 BIR指令:移动字节立即读取2199.10 BIW指令:移动字节立即写入220第10章程序控制指令10.1 FOR指令:循环开始22210.2 NEXT指令:循环结束22410.3 JMP指令:跳接至标签22510.4 LBL指令:语句标签22610.5 LSCR指令:载入顺序控制继电器22610.6 SCRT指令:顺序控制继电器转换22810.7 SCRE指令:顺序控制继电器结束22910.8 CRET指令:从子程序(SBR)有条件返回23110.9 END指令:主程序(OB1)有条件结束23110.10 STOP指令:转换至停止模式23210.11 WDR指令:监视程序复原23210.12 DLED指令:诊断LED 233第11章移位和循环移位指令11.1 SLB指令:向左移位字节23511.2 SLW指令:向左移位字23611.3 SLD指令:向左移位双字23811.4 SRB指令:向右移位字节23911.5 SRW指令:向右移位字24011.6 SRD指令:向右移位双字24211.7 RLB指令:循环左移字节24311.8 RLW指令:循环左移字24411.9 RLD指令:循环左移双字24611.10 RRB指令:循环右移字节24711.11 RRW指令:循环右移字24911.12 RLD指令:循环右移双字25011.13 SHRB指令:寄存器位移252第12章字符串指令12.1 SLEN指令:获取字符串长度25412.2 SCPY指令:将字符串1复制至字符串2 25512.3 SSCPY指令:从字符串复制子字符串25712.4 SCAT指令:字符串连接25812.5 SFND指令:在字符串1中查找字符串2 26012.6 CFND指令:在字符串中查找字符26112.7 LDS=指令:载入字符串等于26312.8 AS=指令:与运算字符串等于26412.9 OS=指令:或运算字符串等于26512.10 LDS指令:载入字符串不等于26612.11 AS指令:与运算字符串不等于26712.12 OS指令:或运算字符串不等于26812.13 ITS指令:整数转换至字符串26912.14 DTS指令:双整数转换至字符串27112.15 RTS指令:实数转换至字符串27212.16 STI指令:字符串转换至整数27412.17 STD指令:字符串转换至长整数27612.18 STR指令:字符串转换至实数278第13章表格指令13.1 FILL指令:内存填充28013.2 ATT指令:增加至表格28113.3 FND?TBL指令:表格查找28313.4 LIFO指令:后入先出28513.5 FIFO指令:先入先出286第14章定时器指令14.1 TON指令:接通延时定时器28814.2 TONR指令:掉电保护性接通延时定时器29014.3 TOF指令:断开延时定时器29114.4 BITIM指令:开始间隔时间29314.5 CITIM指令:计算间隔时间294插图第15章特殊指令15.1 网络读/网络写29615.2 发送/接收29915.3 脉冲输出30215.4 PID指令305。


西门子PLC编程指令1、位逻辑指令(1)-||-常开接点(地址)(2)-|/|-常闭接点(地址)(3)XOR位异或(4)-|NOT|-信号流反向(5)-()输出线圈(6)-(#)-中间输出(7)-(R)线圈复位(8)-(S)线圈置位(9)RS复位置位触发器(10)RS置位复位触发器(11)-(N)-RLO下降沿检测(12)-(P)-PLO上升沿检测(13)-(SAVE)将RLO存入BR存储器(14)MEG地址下降沿检测(15)POS地址上升沿检测2、比较指令(1)CMP?I整数比较(2)CMP?D双整数比较(3)CMP?R实数比较3、转换指令(1)BCD_IBCD码转换为整数(2)I_BCD整数转换为BCD码(3)I_DINT整数转换为双整数(4)BCD_DIBCD码转换为双整数(5)DI_BCD双整数转换为BCD码(6)DI_REAL双整数转换为浮点数(7)INV_I整数的二进制反码(8)INV_DI双整数的二进制反码(9)NEG_I整数的二进制补码(10)NEG_DI双整数的二进制补码(11)NEG_R浮点数求反(12)ROUND舍入为双整数(13)TRUNC舍去小数取整为双整数(14)CEIL上取整(15)FLOOR下取整4、计数器指令(1)S_CUD加减计数(2)S_CU加计数器(3)S_CD减计数器(4)-(SC)计数器置初值(5)-(CU)加计数器线圈(6)-(CD)减计数器线圈5、数据块指令(1)-(OPN)打开数据块:DB或DI6、逻辑控制指令(1)-(JMP)无条件跳转(2)-(JMP)条件跳转(3)-(JMPN)若非则跳转(4)LABEL标号7、整数算术运算指令(1)ADD_I整数加法(2)SUB_I整数减法(3)MUL_I整数乘法(4)DIV_I整数除法(5)ADD_DI双整数加法(6)SUB_DI双整数减法(7)MUL_DI双整数乘法(8)DIV_DI双整数除法(9)MOD_DI回送余数的双整数8、浮点算术运算指令(1)基础指令①ADD_R实数加法②SUB_R实数减法③MUL_R实数乘法④DIV_R实数除法⑤ABS浮点数绝对值运算(2)扩展指令①SQR浮点数平方②SQRT浮点数平方根③EXP浮点数指数运算④LN浮点数自然对数运算⑤SIN浮点数正弦运算⑥COS浮点数余弦运算⑦TAN浮点数正切运算⑧ASIN浮点数反正弦运算⑨ACOS浮点数反余弦运算⑩ATAN浮点数反正切运算9、赋值指令(1)MOVE赋值10、程序控制指令(1)-(Call)从线圈调用FC/SFC(无参数) (2)CALL_FB从方块调用FB(3)CALL_FC从方块调用FC(4)CALL_SFB从方块调用SFB(5)CALL_SFC从方块调用SFC(6)-(MCR<)主控继电器接通(7)-(MCR>)主控继电器断开(8)-(MCRA)主控继电器启动(9)-(MCRD)主控继电器停止(10)-(RET)返回11、移位和循环指令(1)移位指令①SHR_I整数右移②SHR_DI双整数右移③SHL_W字左移④SHR_W字右移⑤SHL_DW双字左移⑥SHR_DW双字右移(2)循环指令①ROL_DW双字左循环②ROR_DW双字右循环12、状态位指令(1)OV-||-溢出异常位(2)OS-||-存储溢出异常位(3)UO-||-无序异常位(4)BR-||-异常位二进制结果(5)==0-||-结果位等于"0"(6)<>0-||-结果位不等于"0" (7)>0-||-结果位大于"0"(8)<0-||-结果位小于"0"(9)>=0-||-结果位大于等于"0" (10)<=0-||-结果位小于等于"0"13、定时器指令(1)S_PULSE脉冲S5定时器(2)S_PEXT扩展脉冲S5定时器(3)S_ODT接通延时S5定时器(4)S_ODTS保持型接通延时S5定时器(5)S_OFFDT断电延时S5定时器(6)-(SP)脉冲定时器线圈(7)-(SE)扩展脉冲定时器线圈(8)-(SD)接通延时定时器线圈(9)-(SS)保持型接通延时定时器线圈(10)-(SF)断开延时定时器线圈14、字逻辑指令(1)WAND_W字和字相"与"(2)WOR_W字和字相"或"(3)WAND_DW双字和双字相"与" (4)WOR_DW双字和双字相"或" (5)WXOR_W字和字相"异或" (6)WXOR_DW双字和双字相"异或“。
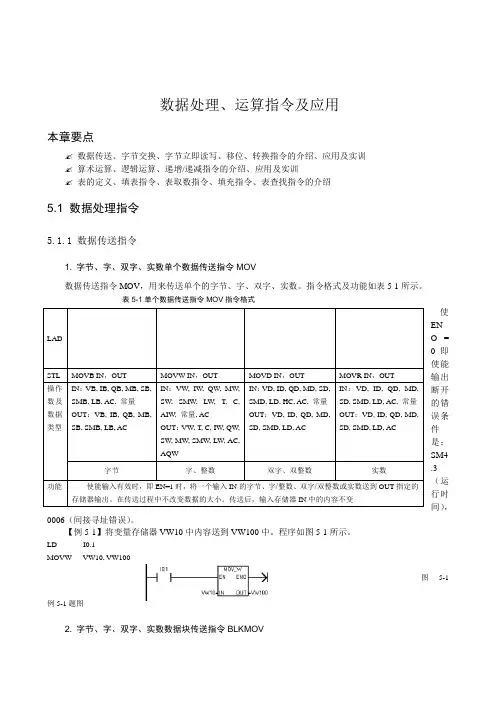
数据处理、运算指令及应用本章要点✍ 数据传送、字节交换、字节立即读写、移位、转换指令的介绍、应用及实训 ✍ 算术运算、逻辑运算、递增/递减指令的介绍、应用及实训✍ 表的定义、填表指令、表取数指令、填充指令、表查找指令的介绍5.1 数据处理指令5.1.1 数据传送指令1. 字节、字、双字、实数单个数据传送指令MOV数据传送指令MOV ,用来传送单个的字节、字、双字、实数。
指令格式及功能如表5-1所示。
表5-1单个数据传送指令MOV 指令格式使EN O = 0即使能输出断开的错误条件是:SM4.3(运行时间),0006(间接寻址错误)。
【例5-1】将变量存储器VW10中内容送到VW100中。
程序如图5-1所示。
LD I0.1MOVW VW10, VW100图5-1例5-1题图2. 字节、字、双字、实数数据块传送指令BLKMOV数据块传送指令将从输入地址IN 开始的N 个数据传送到输出地址OUT 开始的N 个单元中,N 的范围为1至255,N 的数据类型为:字节。
指令格式及功能如表5-2所示。
表5-2 数据传送指令BLKMOV 指令格式使ENO= 0的错误条件:0006(间接寻址错误)0091(操作数超出范围)。
【例5-2】程序举例:将变量存储器VB20开始的4个字节(VB20- VB23)中的数据,移至VB100开始的4个字节中(VB100-VB103)。
程序如图5-2所示。
LAD STLLD I0.0BMB VB20 ,VB100, 4图5-2 例5-2图程序执行后,将VB20~VB23中的数据30、31、32、33送到VB100~VB103。
执行结果如下:数组1数据 30 31 32 33数据地址 VB20 VB21 VB22 VB23块移动执行后:数组2数据 30 31 32 33数据地址 VB100 VB101 VB102 VB1035.1.2 字节交换、字节立即读写指令1. 字节交换指令字节交换指令用来交换输入字IN 的最高位字节和最低位字节。
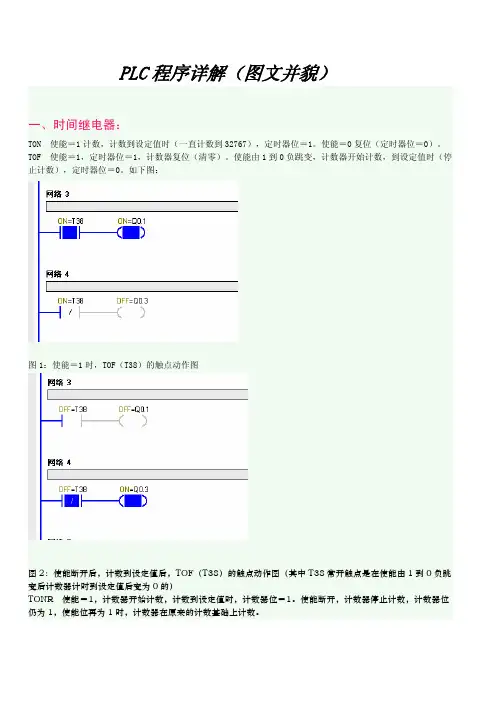
PLC程序详解(图文并貌)一、时间继电器:TON 使能=1计数,计数到设定值时(一直计数到32767),定时器位=1。
使能=0复位(定时器位=0)。
TOF 使能=1,定时器位=1,计数器复位(清零)。
使能由1到0负跳变,计数器开始计数,到设定值时(停止计数),定时器位=0。
如下图:图1:使能=1时,TOF(T38)的触点动作图图2:使能断开后,计数到设定值后,TOF(T38)的触点动作图(其中T38常开触点是在使能由1到0负跳变后计数器计时到设定值后变为0的)TONR 使能=1,计数器开始计数,计数到设定值时,计数器位=1。
使能断开,计数器停止计数,计数器位仍为1,使能位再为1时,计数器在原来的计数基础上计数。
以上三种计数器可以通过复位指令复位。
正交计数器 A相超前B相90度,增计数B相超前A相90度,减计数当要改变计数方向时(增计数或减计数),只要A相和B相的接线交换一下就可以了。
二、译码指令和编码指令:译码指令和编码指令执行结果如图所示:DECO是将VW2000的第十位置零(为十进制的1024),ENCO输入IN最低位为1的是第3位,把3写入VB10(二进制11)。
三、填表指令(ATT)S7-200填表指令(ATT)的使能端(EN)必须使用一个上升沿或下降沿指令(即在下图的I0.1后加一个上升沿或下降沿),若单纯使用一个常开触点,就会出现以下错误:这一点在编程手册中也没有说明,需要注意。
其他的表格指令也同样。
四、数据转换指令使用数据转换指令时,一定要注意数据的范围,数据范围大的转换为数据范围小的发注意不要超过范围。
如下图所示为数据的大小及其范围。
(1)BCD码转化为整数(BCD_I)关于什么是BCD码,请参看《关于BCD码》。
BCD码转化为整数,我是这样理解的:把BCD码的数值看成为十进制数,然后把BCD到整数的转化看成是十进制数到十六进制数的转化。
如下图所示,BCD码为54,转化为整数后为36。
「干货分享」西门子S7-200SMARTPLC常用编程指令汇总
01一、定时器
1、S7-200 SMART CPU提供了接通延时定时器、(TON)、保持型接通延时定时器(TONR)、断开延时定时器(TOF)三种定时器。
2、定时器编号与分辨率
3、定时器实例分析
(1)接通延时定时器TON
(2)保持型接通延时定时器TONR
(3)断开延时定时器TOF
02二、计数器
1、S7-200 SMART CPU提供了加计数器(CTU)、减计数器(CTD)、加减计数器(CTUD)三种计数器。
2、计数器实例分析
(1)加计数器CTU
(2)减技数CTD
(3)加减计数器CTUD
03三、循环指令
1、S7-200 SMART CPU提供了FOR-NEXT循环指令用于重复执行程序段。
每条FOR指令需要使用一条NEXT指令,FOR指令表示循环体的开始,NEXT指令表示循环体的结束。
FOR- NEXT循环指令循环嵌套深度可达8层。
2、循环指令示例分析
通过调用FOR - NEXT 指令对VW100、VW102、......、VW108 5个INT变量进行求和,求和的结果存放到VW200中。
04四、移位和循环指令
1、指令概览
2、示例分析
(1)移位指令和循环移位指令的示例分析
(2)移位寄存器位指令
综上所述,每当M0.0有一个上升沿到来时,从V200.4开始向高地址方向数的9个位会朝高地址方向移位,I0.0的状态会被送到V200.4中。
西门子PLC基本指令表及各指令解释最受欢迎的工控微信平台:技术分享、学习交流、工控视频西门子PLC基本指令表如下图所示名称助记符目标元件说明取指令LD I、Q、M、SM、T、C、V、S、L常开接点逻辑运算起始取反指令LDN I、Q、M、SM、T、C、V、S、L常闭接点逻辑运算起始线圈驱动指令 = Q、M、SM、T、C、V、S、L 驱动线圈的输出与指令 A I、Q、M、SM、T、C、V、S、L单个常开接点的串联与非指令AN I、Q、M、SM、T、C、V、S、L单个常闭接点的串联或指令O I、Q、M、SM、T、C、V、S、L单个常开接点的并联或非指令ON I、Q、M、SM、T、C、V、S、L单个常闭接点的并联置位指令S I、Q、M、SM、T、C、V、S、L使动作保持复位指令R I、Q、M、SM、T、C、V、S、L使保持复位正跳变ED I、Q、M、SM、T、C、V、S、L 输入信号上升沿产生脉冲输出负跳变EU I、Q、M、SM、T、C、V、S、L 输入信号下降沿产生脉冲输出空操作指令NOP 无使步序作空操作一、标准触点LD、A、O、LDN、AN、ONLD,取指令。
表示一个与输入母线相连的常开接点指令,即常开接点逻辑运算起始。
LDN,取反指令。
表示一个与输入母线相连的常闭接点指令,即常闭接点逻辑运算起始。
A,与指令。
用于单个常开接点的串联。
AN,与非指令。
用于单个常闭接点的串联。
O,或指令。
用于单个常开接点的并联。
ON,或非指令。
用于单个常闭接点的并联。
二、正、负跳变ED、EUED,在检测到一个正跳变(从OFF到ON)之后,让能流接通一个扫描周期。
EU,在检测到一个负跳变(从ON到OFF)之后,让能流接通一个扫描周期。
三、输出==,在执行输出指令时,映像寄存器中的指定参数位被接通。
四、置位与复位指令S、RS,执行置位(置1)指令时,从bit或OUT指定的地址参数开始的N个点都被置位。
R,执行复位(置0)指令时,从bit或OUT指定的地址参数开始的N个点都被复位。
西门子PLC常用指令举例(新手值得收藏)在西门子plc梯形图中,将其触点和线圈等称为程序中的编程元件。
编程元件也称为软元件,是指在plc编程时使用的输入/输出端子所对应的存储区以及内部的存储单元、寄存器等。
根据编程元件的功能,西门子plc梯形图中的常用的编程元件主要有输入继电器(I)、输出继电器(Q)、辅助继电器(M、SM)、定时器(T)、计数器(C)和一些其他较常见的编程元件等。
1、输入继电器(I)的标注西门子PLC梯形图中的输入继电器用“字母I 数字”进行标识,每个输入继电器均与PLC的一个输入端子对应,用于接收外部开关信号。
输入继电器由PLC端子连接的开关部件的通断状态(开关信号)进行驱动,当开关信号闭合时,输入继电器得电,其对应的常开触点闭合,常闭触点断开,如图1所示。
图1 西门子PLC梯形图中的输入继电器2、输出继电器(Q)的标注西门子PLC梯形图中的输出继电器用“字母Q 数字”进行标识,每一个输出继电器均与PLC的一个输出端子对应,用于控制PLC外接的负载。
输出继电器可以由PLC内部输入继电器的触点、其他内部继电器的触点或输出继电器自己的触点来驱动,如图2所示。
图2 西门子PLC梯形图中的输出继电器3、辅助继电器(M、SM)的标注在西门子PLC梯形图中,辅助继电器有两种,一种为通用辅助继电器,一种为特殊标志位辅助继电器。
(1)通用辅助继电器的标注。
通用辅助继电器,又称为内部标志位存储器,如同传统继电器控制系统中的中间继电器,用于存放中间操作状态,或存储其他相关数字,用“字母M 数字”进行标识,如图3所示。
图3 西门子PLC梯形图中的通用辅助继电器由图3可以看到,通用辅助继电器M0.0既不直接接受外部输入信号,也不直接驱动外接负载,它只是作为程序处理的中间环节,起到桥梁的作用。
(2)特殊标志位辅助继电器的标注。
特殊标志位辅助继电器,用“字母SM 数字”标识,如图4所示,通常简称为特殊标志位继电器,它是为保存PLC自身工作状态数据而建立的一种继电器,用于为用户提供一些特殊的控制功能及系统信息,如用于读取程序中设备的状态和运算结果,根据读取信息实现控制需求等。