转动设备联轴器对轮找正原理的探讨
- 格式:doc
- 大小:66.00 KB
- 文档页数:6

全面介绍转动设备的联轴器找中心、对正一、联轴器找中心意义:联轴器找中心,是汽轮发电机、水泵、风机、磨煤机等转动设备检修的一项重要工作,转动设备联轴器的中心不对中,必然会引起机组的异常振动。
因此,对安装或检修后转动设备的联轴器必须进行找中心工作,使两轴的中心偏差符合允许范围内。
二、联轴器找中心目的:找中心的目的是使一转子轴的中心线与另一转子轴中心线重合,即要使联轴器两对轮的中心线重合,具体要求:1、使两对轮的外圆面重合。
2、使两个对轮的端面平行。
三、联轴器找中心任务:1、测量两对轮的外圆和端面的偏差情况。
2、根据测量的偏差数值,对机座作进行相应的调整,使两对轮同心、端面平行。
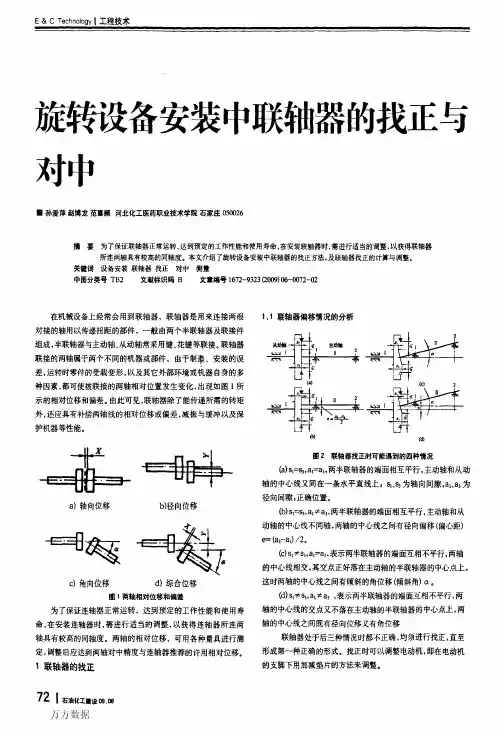
四、联轴器对中状态分析一般情况下,可能遇到的有以下四种情形。
1)、S1=S2,a1=a2 两半靠背轮端面是处于既平行又同心的正确位置,这时两轴线必须位于一条直线上。
2)、S1=S2,a1≠a2 两半靠背轮端面平行但轴线不同心,这时两轴线之间有平行的径向位移e=(a2-a1)/2。
3)、S1≠S2,a1=a2 两半靠背轮端面虽然同心但不平行,两轴线之间有角向位移α。
4)、S1≠S2,a1≠a2 两半靠背轮端面既不同心又不平行,两轴线之间既有径向位移e又有角向位移α。
联轴器处于第一种情况是我们在找正中需要努力达到的理想状态,而其他三种状态都不正确,需要我们进行调整,使其达到第一种情况。
在安装设备时,首先把从动机(即常说的泵头)安装好,使其轴线处于水平位置,然后再安装主动机(即常说的电机),所以找正时只需要调整电机,即在电机的支脚下面加调整垫片的方法来调节。
五、找中时测量方法下面主要介绍在检修过程中常用的两种测量调整方法,根据测量工具不同可分为:1)、利用刀形尺和塞尺测量联轴器的不同心和利用楔形间隙轨或塞尺测量联轴器端面的不平行度,这种方法适用于弹性联接的低转速、精度要求不高的设备。
2)、利用百分表及表架或专用找正工具(如激光对中校正仪)测量两联轴器的不同心及不平行情况,这种方法适用于转速较高、刚性联接和精度要求高的转动设备。
旋转设备安装中联轴器的找正与对中摘要:为了保证联轴器正常运转,达到预定的工作性能和使用寿命,在安装联轴器时,需进行适当的调整,以获得联轴器所连两轴具有较高的同轴度。
旋转设备的联轴器对中是机械安装维修的一项重要工作。
现对几种联轴器对中的方法进行比较,结果表明,激光对中仪具有方便、快捷、精确、高效等优点,应用前景广泛。
关键词:联轴器对中;百分表测量法;激光对中仪1前言在机械设备中常常用到联轴器,联轴器是用来连接两个对接轴传递扭矩的部件,通常由两个半联接和连接部件组成。
半联轴器与主动轴和从动轴采用键和花键相连。
联轴器的两个轴是两个不同的机器或零件。
由于制造和安装的误差、工件在运行时的载荷变形以及其他外部环境或机器本身的各种因素,会改变连接的两个轴的相对位置,产生相对位移。
因此,除了所需扭矩的传递之外,联轴器还应该具有补偿两轴相对为了保证连轴器的正常运行,为了达到预期的性能和使用寿命,在安装连轴器时,需要适当的调整以获得联轴器连接的两轴的同轴度。
两个轴的相对位移可以通过各种测量工具测量。
在调整后,应实现两轴对中精度与连轴器推荐的许用相对位移2联轴器对中的常用方法联轴器找正时,通过测量两半联轴器的径向位移和角度位移确定联轴器的相对位置。
安装机器时,先把主机中心位置标高调整好并找平后,再进行联轴器的找正。
通过测量与分析计算,确定偏差情况,调整原动机轴中心位置以达到主动轴与从动轴既同心又平行。
根据测量时所用工具不同,联轴器对中有下面几种方法。
2.1简单对中法用直尺和塞尺测量两半联轴器的径向位移,用平面规和楔形规测量两半联轴器的轴向位移。
测量在联轴器的上、下、左、右四个方位分别进行。
此法虽简单但精度不高,仅适用于精度要求不高的低速场合。
2.2利用中心卡及塞尺测量对中利用中心卡及塞尺测量两半联轴器径向位移和轴向位移的装置。
此法可以同时测量联轴器的径向位移和轴向位移,其操作方便、精度较高。
但由于联轴器的结构及尺寸不同,中心卡没有统一规格,往往由维修安装人员自行制作,故此测量方法工作效率不高。
浅谈设备找正摘要本文简述了转动设备检修中,联轴器常见的几种找正方法以及适用情况,重点对找正过程中常遇到的几种错误方法加以阐述。
指导员工采用正确的找正方法,避免走弯路或出现误差,从而快速保质的完成对中检修。
关键词:找正联轴器单表法双表法三表法前言:联轴器找正是转动设备检修过程中的重要环节,找正目的是使转动设备的主动轴与从动轴两轴的中心线在同一直线上,消除设备在运转过程中联轴器处的机械应力。
一旦找正不好,会直接导致运转设备振动大、轴承损坏、联轴器膜片或注销磨损以及其它部件过早失效。
因此找正的精度是设备能否正常运转,配件能否长周期使用的关键。
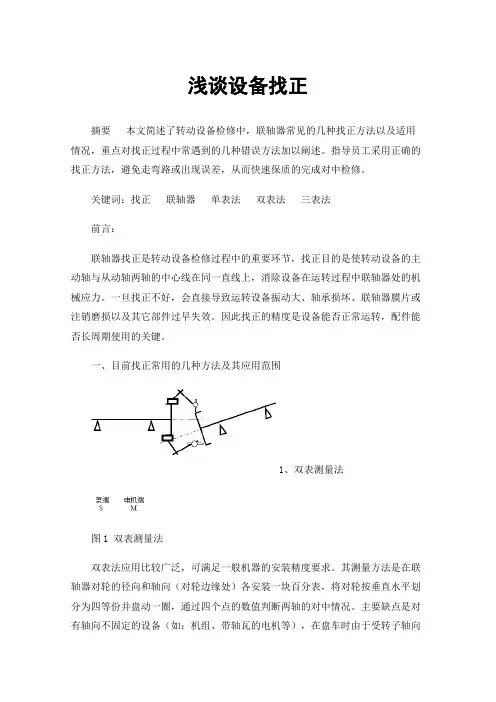
一、目前找正常用的几种方法及其应用范围1、双表测量法图1 双表测量法双表法应用比较广泛,可满足一般机器的安装精度要求。
其测量方法是在联轴器对轮的径向和轴向(对轮边缘处)各安装一块百分表,将对轮按垂直水平划分为四等份并盘动一圈,通过四个点的数值判断两轴的对中情况。
主要缺点是对有轴向不固定的设备(如:机组、带轴瓦的电机等),在盘车时由于受转子轴向窜动的影响,其端面的位移数据会产生误差。
因此,这种测量方法适用于由滚动轴承支撑的转轴及轴向窜动比较小的中、小型机器。
2、三表测量法三表测量法与两表测量法不同之处是在联轴器对轮轴向多安装了一块百分表,目的是消除轴在盘车时窜动对轴向读数的影响。
其又可采用两种方法:方法1,将多加的百分表安装指向转子轴心位置,其主要作用是盘车时用来显示转子的轴向窜量,在计算轴向数值时根据转子窜动方向将该数值减去或加上,此种方法必须保证百分表安装在转子轴心处,否则会略有偏差。
方法2,与轴中心等距离处对称布置两块百分表,两块表同时测量联轴器对轮轴向数值,最后将两表数值相减,除去转子窜量对轴向数值的影响,由于两块表都测量了联轴器的轴向偏差,因此还需将相减后的数值除以2,即为两联轴器轴向数值偏差。
3、单表测量法图4单表测量法单表法它是近年来国外应用日益广泛的一种联轴器找正方法。

转动设备联轴器对轮找正原理摘要:通过对转动设备联轴器找正原理的探讨,寻找出一种简便、快捷、使用的联轴器找正方法。
关键词:上张口下张口晃动度瓢偏度1 概述联轴器找中心是转动设备检修工作的一项重要内容,若找正的方法不对或找正找的结果不精确,会引起转动设备的振动值超标,严重威胁着转动设备的正常运行,尤其是高转速设备,对联轴器找正的数据要求极为严格。
现就转动设备联轴器找正问题作一下系统的阐述。
2 联轴器找中心原理及分析联轴器找中心的方法有不同种类。
按转动设备的安装位置分为卧式和立式两种,其中卧式较常见;按找正简易程度又分为简易找正与系统找正两种,前者找出的结果较粗略,后者得出的结果比较理想。
无论按什么方式分类,它们的原理及分析方法是一致的。
2.1 联轴器找中心找中心的目的是使一转子轴的中心线为另一转子轴的中心线的延续曲线。
因为两个转子的轴是用联轴器连接,所以只要联轴器的两对轮中心线是延续的,那么两转子的中心线也就一定是一条延续的曲线。
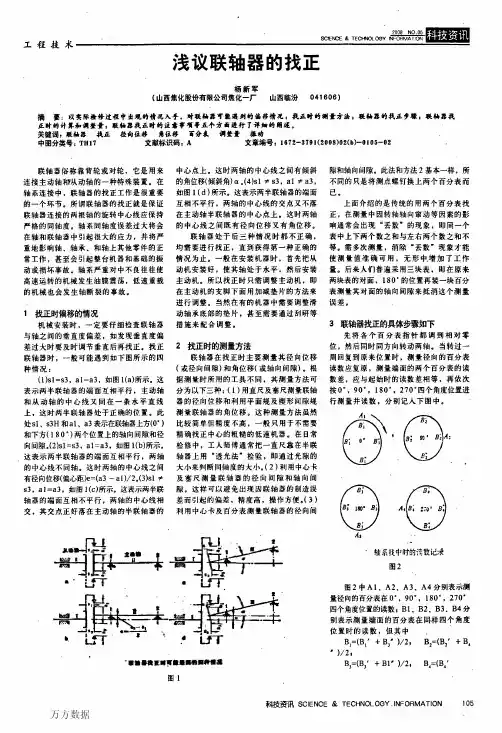
要使联轴器的两对轮中心是延续的,则必须满足以下两个条件:(1)、使两个对轮中心重合,也就是使两对轮的外圆重合;(2)、使两对轮的结合面(端面)平行(两中心线平行)。
如图1——1所示,若a1=a2=a3=a4,则表明两对轮是平行的;若h1=h2 =h3=h4,则表明两对轮是同心的。
同时满足以上两个条件,则两轴的中心线就是一条延续曲线。
如果测的值不等,需要对地脚进行调整,使之满足以上两个条件。
2.2 联轴器找正状态分析联轴器两对轮若相对位置不满足以上两个条件,则有两种状态:两对轮上张口、两对轮下张口。
其中两对轮上张口又分为电机侧对轮高、电机侧对轮低两种,两对轮下张口又分为电机侧对轮高、电机侧对轮低两种。
两对轮相对位置的状态分类及对应的状态图1---2。
2.3 联轴器对轮找正计算联轴器对轮找正计算的理论依据是三角形相似原理。
利用两个直角三角形相似得出所求量与已知量的关系,从而计算出所求的具体值。
联轴器找正方法详解_联轴器三表精确对中联轴器找正详解1、联轴器找正的目的凡通过联轴器对接的两个轴中心线不重合会使设备在运转过程中产生振动、引起轴承温度升高、磨损,甚至引起整台设备剧烈振动,一些零部件的瞬间损坏,导致设备发生故障不能正常工作。
故联轴器找正的目的主要有以下几个方面:1)最大可能减少两轴相错或相对倾斜过大所引起的振动和噪音。
2)避免轴与轴承间引起的附加径向载荷。
3)保证每根轴在工作中的轴向窜量不受到对方的阻碍。
2、联轴器的找正要求联轴器找正必须要达到两半联轴器是处于平行且同心的正确位置,这时两轴的中心线处于一条直线上。
可以通过在电机和减速机的支脚下用加减垫片的方法来调整。
在现场的实际调整过程中不可能达到两个半联轴器的中心线绝对在同一轴线上,所以在联轴器的安装、调整过程中就必须确定一个误差范围。
现把几种常用联轴器同轴度和端面间隙的调整标准进行整理。
3、联轴器找正的测量方法联轴器找正时主要测量其径向位移(或径向间隙)和角位移(或轴向间隙)。
利用直尺和塞尺测量径向位移,利用平面规和楔形间隙规测量角位移。
方法简单但精度不高,一般只用于不需要精确找正的粗糙低速机器。
利用中心卡和百分表测量联轴器的径向间隙和轴向间隙,适用于需要精确找正中心的精密仪器和高速机器,操作方便,精度高,应用广泛。
测量方法还有双表测量法、三表测量法(又称两点测量法)、五表测量法(又称四点测量法)和单表测量法。
热镀锌线上的测量方式主要采用双表测量法。
离心式压缩机主机联轴器三表精确对中找正联轴器三表精确对中找正,适用于需要精确对中或高速旋转的设备,例如汽轮机、离心式压缩机。
与联轴器二表对中找正不同,在与传动轴中心线等距离处,对称布置两块百分表同时读其轴向读数,可以消除传动轴手动盘车时轴向窜动对轴向读数的误差,提高测量精度。
但在百分表读数记录及计算上稍复杂,容易混淆。
现以00—3.1/0.93型CO2离心式压缩机增速器高速轴与压缩机主机轴联轴器的对中找正为实例,对此加以阐述。
转动设备联轴器对轮找正原理的探讨作者:未知文章来源:互联网点击数:619 更新时间:2006-7-3 9:46:45
摘要:通过对转动设备联轴器找正原理的探讨,寻找出一种简便、快捷、使用的联轴器找正方法。
关键词:上张口下张口晃动度瓢偏度
1 概述
联轴器找中心是转动设备检修工作的一项重要内容,若找正的方法不对或找正找的结果不精确,会引起转动设备的振动值超标,严重威胁着转动设备的正常运行,尤其是高转速设备,对联轴器找正的数据要求极为严格。
现就转动设备联轴器找正问题作一下系统的阐述。
2 联轴器找中心原理及分析
联轴器找中心的方法有不同种类。
按转动设备的安装位置分为卧式和立式两种,其中卧式较常见;按找正简易程度又分为简易找正与系统找正两种,前者找出的结果较粗略,后者得出的结果比较理想。
无论按什么方式分类,它们的原理及分析方法是一致的。
2.1 联轴器找中心
找中心的目的是使一转子轴的中心线为另一转子轴的中心线的延续曲线。
因为两个转子的轴是用联轴器连接,所以只要联轴器的两对轮中心线是延续的,那么两转子的中心线也就一定是一条延续的曲线。
要使联轴器的两对轮中心是延续的,则必须满足以下两个条件:(1)、使两个对轮中心重合,也就是使两对轮的外圆重合;(2)、使两对轮的结合面(端面)平行(两中心线平行)。
如图1——1所示,若a1=a2=a3=a4,则表明两对轮是平行的;若h1=h2=h3=h4,则表明两对轮是同心的。
同时满足以上两个条件,则两轴的中心线就是一条延续曲线。
如果测的值不等,需要对地脚进行调整,使之满足以上两个条件。
2.2 联轴器找正状态分析
联轴器两对轮若相对位置不满足以上两个条件,则有两种状态:两对轮上张口、两对轮下张口。
其中两对轮上张口又分为电机侧对轮高、电机侧对轮低两种,两对轮下张口又分为电机侧对轮高、电机侧对轮低两种。
两对轮相对位置的状态分类及对应的状态图1---2。
2.3 联轴器对轮找正计算
联轴器对轮找正计算的理论依据是三角形相似原理。
利用两个直角三角形相似得出所求量与已知量的关系,从而计算出所求的具体值。
下面以状态一为例进行计算。
分析:以转机侧对轮为基准,调整电机侧对轮的位置,使两对轮的相互位置符合要求。
计算:设对轮的直径为D,电机侧ⅹ轴承地脚与其对轮的距离为l1,电机侧y轴承地脚与其对轮的距离为l,a:电机侧对轮相对于转机侧对轮的张口度,h:两对轮的高度差。
由三角形相似原理可知:
RtΔAOAˊ∽RtΔAˊOˊE,则= ,即Δⅹ= ;
RtΔACB∽RtΔAˊCˊBˊ,则= ,即Δy=;
又由于电机对轮比转机侧对轮高h,所以求得的电机两端地脚垫片总的调整量为:
ⅹ轴承地脚垫片总的调整量:Δⅹ-h= -h
y轴承地脚垫片总的调整量:Δy-h= =;-h
同里可求出状态二、状态三、状态四电机两端地脚垫片总的调整量。
四种状态汇总表见下表。
从以上计算可以总结出联轴器对轮找正的基本步骤:(1)、测量出转机侧对轮的径向晃动值,轴向的瓢偏值;(2)、根据测出的数据绘出对轮偏差总结图;(3)、由对轮偏差图绘出对轮相对位置侧状态图;(4)、根据状态图计算出地脚垫片的调整量;(5)、现场进行调整。
2.4 举例
已知:如图1――3、图1――4所示,求电机侧两轴承地脚垫片总的调整量。
解答:(1)、根据图1――4的数据图绘出如图1――5所示的对轮偏差总计图;
(2)、由对轮偏差总结图绘出如图1――6、图1――7所示的对轮状态图;
(3)、由图1――6、1――7的状态图分析可知,对轮上下是上张口且电机侧对轮高于转侧对轮,对轮左右是下张口且电机侧对轮低于转机侧对轮。
根据以上分析,
(1)、各地脚在上下方向的调整量计算:
ⅹ轴承地脚垫片总的调整量:Δⅹ-h= -h=-0.03=0.07mm;
y轴承地脚垫片总的调整量:Δy-h= -h=-0.03=0.27mm。
(2)、各地脚在左右方向的调整量计算:
ⅹ轴承地脚垫片总的调整量:-Δⅹ+h=- -h=-+0.07=-0.05mm;
y轴承地脚垫片总的调整量:-Δy+h=- -h=-+0.07=-0.29mm。
综上所求:ⅹ轴承地脚垫片上下方向上应加垫0.07mm,y轴承地脚垫片上下方向上应加垫0.27mm,ⅹ轴承地脚垫片左右方向上应向右移动0.05mm,y轴承地脚垫片上下方向上应向右0.29mm。