线性系统理论大纲
- 格式:doc
- 大小:20.00 KB
- 文档页数:1
线性系统理论第二版教学大纲课程简介本课程是针对电子信息、自动化等专业开设的一门重要的专业必修课程,主要研究线性系统的基本概念、理论和方法。
在本课程中,学生将学习到线性系统的数学模型、传递函数、频率特性、稳定性等关键概念,并应用这些知识分析和设计系统。
教学目标1.掌握线性系统的基本概念、理论和方法。
2.熟练掌握线性系统数学模型、传递函数、频率特性、稳定性等基本概念。
3.理解线性系统的几何特性,包括极点、零点和步响应等。
4.能够利用传递函数和频率响应等方法分析和设计系统。
5.了解现代控制理论和应用。
教学内容第一章线性系统基本概念1.1 系统的概念1.2 系统的建模1.3 信号与系统的分类1.4 线性系统的定义第二章时域分析2.1 系统的时域响应2.2 系统的因果性和稳定性2.3 系统的冲击响应和阶跃响应2.4 系统的单位反馈响应和频率响应第三章频域分析3.1 傅里叶变换3.2 傅里叶反变换3.3 频域分析基本方法3.4 奇偶性和周期性3.5 Bode图和极点、零点第四章线性系统稳定性分析4.1 稳定性定义和判据4.2 极点位置和稳定性分析4.3 极点的稳定性分析4.4 稳定性判据5.1 系统的规范化5.2 系统的合成5.3 系统的简化第六章现代控制理论与应用6.1 状态空间法6.2 系统的观测与控制6.3 非线性系统控制6.4 自适应控制教学方法本课程采用讲授与实例讲解相结合的教学方法。
每个章节都将以概念讲述为主,结合例题进行讲解,力求让学生具有深刻的理论、推导能力和实际应用能力。
同时,课程中将引入现代控制理论及应用,为学生提供最新的学术发展动态。
教学评估1.平时考核(30%):包括课堂参与、作业和实验。
2.期中考试(30%):测试学生的对概念和基础知识的掌握程度。
3.期末考试(40%):测试学生对概念、基础知识和应用能力的综合掌握程度。
参考书目1.钱世光、戚传波等,《线性系统理论与设计》(第二版),科学出版社,2017。
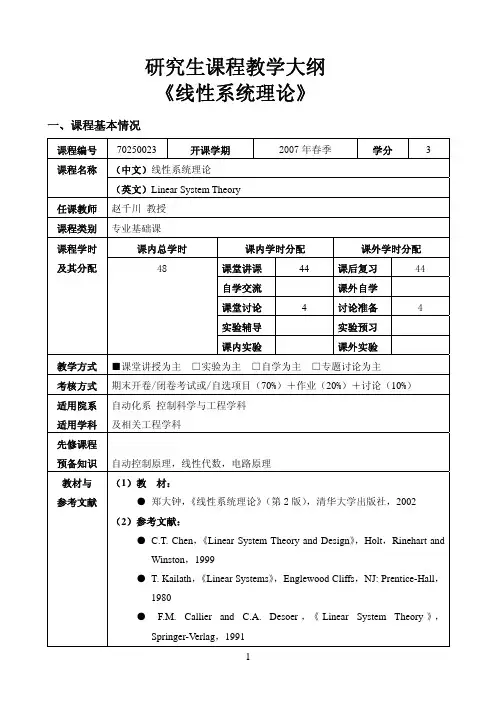
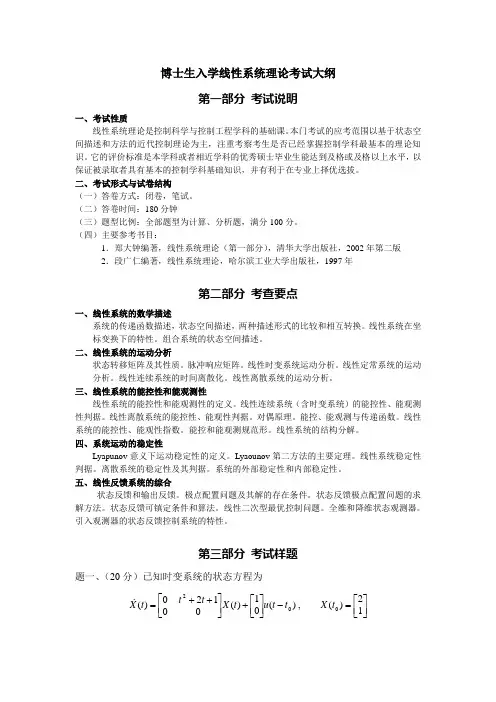
博士生入学线性系统理论考试大纲第一部分 考试说明一、 考试性质线性系统理论是控制科学与控制工程学科的基础课。
本门考试的应考范围以基于状态空间描述和方法的近代控制理论为主,注重考察考生是否已经掌握控制学科最基本的理论知识。
它的评价标准是本学科或者相近学科的优秀硕士毕业生能达到及格或及格以上水平,以保证被录取者具有基本的控制学科基础知识,并有利于在专业上择优选拔。
二、 考试形式与试卷结构(一)答卷方式:闭卷,笔试。
(二)答卷时间:180分钟(三)题型比例:全部题型为计算、分析题,满分100分。
(四)主要参考书目:1.郑大钟编著,线性系统理论(第一部分),清华大学出版社,2002年第二版2.段广仁编著,线性系统理论,哈尔滨工业大学出版社,1997年第二部分 考查要点一、 线性系统的数学描述系统的传递函数描述,状态空间描述,两种描述形式的比较和相互转换。
线性系统在坐标变换下的特性。
组合系统的状态空间描述。
二、 线性系统的运动分析状态转移矩阵及其性质。
脉冲响应矩阵。
线性时变系统运动分析。
线性定常系统的运动分析。
线性连续系统的时间离散化。
线性离散系统的运动分析。
三、 线性系统的能控性和能观测性线性系统的能控性和能观测性的定义。
线性连续系统(含时变系统)的能控性、能观测性判据。
线性离散系统的能控性、能观性判据。
对偶原理。
能控、能观测与传递函数。
线性系统的能控性、能观性指数。
能控和能观测规范形。
线性系统的结构分解。
四、 系统运动的稳定性Lyapunov 意义下运动稳定性的定义。
Lyaounov 第二方法的主要定理。
线性系统稳定性判据。
离散系统的稳定性及其判据。
系统的外部稳定性和内部稳定性。
五、 线性反馈系统的综合状态反馈和输出反馈。
极点配置问题及其解的存在条件。
状态反馈极点配置问题的求解方法。
状态反馈可镇定条件和算法。
线性二次型最优控制问题。
全维和降维状态观测器。
引入观测器的状态反馈控制系统的特性。
第三部分 考试样题题一、(20分)已知时变系统的状态方程为⎥⎦⎤⎢⎣⎡=-⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡++=12)(,)(01)(00120)(002t X t t u t X t t t X其中)sin()(00t t t t u -=-是从0t 时刻开始的正弦信号,试求解该方程。
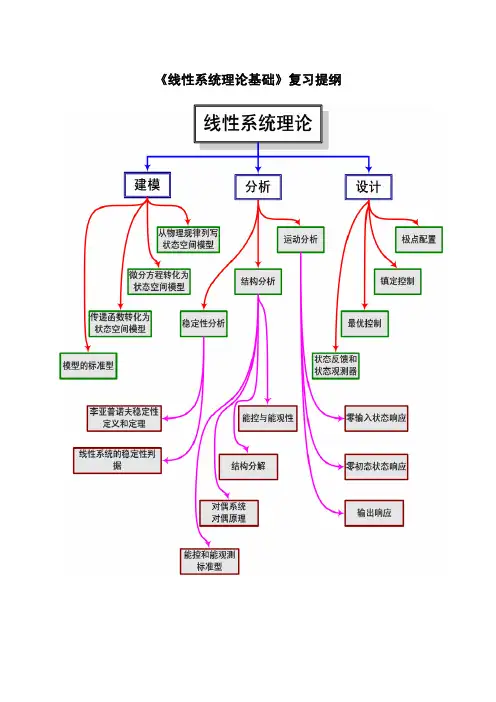

线性系统理论一、主要内容本课程是一门信息科学的专业基础课程,阐述分析和综合线性多变量系统的理论、方法和工程上的实用性,本理论在控制技术、计算方法和信号处理等领域有着广泛的应用。
1、系统、系统模型,线性系统理论基本内容2、状态、状态空间,状态和状态空间的数学描述,连续变量动态的状态空间描述,系统输入输出描述与状态空间描述的关系,LTI系统的特征结构,状态方程的约当规范型,系统状态方程与传递函数矩阵的关系,组合系统的状态空间描述3、连续时间LTI系统的运动分析,状态转移矩阵和脉冲响应矩阵,连续时间LTV系统的运动分析,连续时间LTI系统的时间离散化,离散时间线性系统的运动分析4、线性系统的能控性和能观测性,连续时间LTI系统的能控性和能观测性判据,离散时间线性系统的能控性和能观测性判据5、对偶系统和对偶性原理,时间离散化线性系统保持能控性和能观测性的条件,能控和能观测规范型,连续时间LTI系统的结构分解6、系统外部和内部稳定性,李亚普诺夫稳定的基本概念,李亚普诺夫第二方法的主要定理,连续时间线性系统的状态运动稳定性判据,离散时间线性系统的状态运动稳定性判据7、系统综合问题,状态反馈和输出反馈,状态重构和状态观测器,降维状态观测器,状态观测器状态反馈系统的等价性问题二、线性系统及其研究的对象一般说来,许多物理系统在其工作点的附近都可以近似地用一个有限维的线性系统来描述,这不仅是由于线性系统便于从数学上进行处理,更为重要的,它可以在相当广泛的范围内反映系统在工作点附近的本质。
因此,线性系统理论研究对象是 (线性的)模型系统,不是物理系统。
控制理论发展到今天,包括了众多的分支,如最优控制,鲁棒控制,自适应控制等。
但可以毫不夸张地说,线性系统的理论几乎是所有现代控制理论分支的基础,也是其它相关学科如通讯理论等的基础。
三、研究线性系统的基本工具研究有限维线性系统的基本工具是线性代数或矩阵论。
用线性代数的基本理论来处理系统与控制理论中的问题,往往易于把握住问题的核心而得到理论上深刻的结果。

Chapter 2 Mathematical Descriptions of Systems定义2.1 一个系统在0t 时刻的状态是一组信息的组合,它和系统的输入0()()u t t t ≥一起可唯一确定系统的输出0()()y t t t ≥系统数学描述小结系统类型 内部描述 外部描述 分布、线性 0()(,)()tt y t G t u d τττ=⎰ 集中、线性()()()()x A t x B t uy C t xD t u=+=+ 0()(,)()tt y t G t u d τττ=⎰分布、线性、定常()()()()()()t y t G t u dy s G s u s i r r a t i o n a lτττ=-=⇒⎰集中、线性、定常 x A x B uy C x D u=+=+()()()()()()t y t G t u dy s G s u s r a t i o n a lτττ=-=⇒⎰Chapter 4 State-space Solutions and Realizations线性定常系统状态方程的解()()(0)()tAtA t x t e x eBu d τττ-=+⎰()()(0)()()tAt A t y t Ce x C eBu d Du t τττ-=++⎰111()()[(0)()]()()(0)[()]()xs sI A x B u s y s C sI A x C sI A B D us ---=-+=-+-+连续状态方程按采样时间T 离散化 0TA TAA d eB de B d ττ==⎰定义4.1 设P 为n n ⨯非奇异实矩阵,任等价变换x Px =,那么方程xAx Bu y C x Du=+=+ 与原方程代数等价。
(其中,11,,,A PAP B PB C C P D D --====)定理 4.1 两个线性定常系统状态方程为零状态态等价(具有相同的传递矩阵)的充分必要条件mmCA B CA B =定义4.2 设()X t 是()x A t x = 的任一基本矩阵,那么100(,)()()t t X t X t φ-=称该方程的状态转移矩阵,它同时也是方程00'(,)()(,)t t A t t t φφ=关于初始条件00(,)t t I φ=的唯一解。
线性系统理论Linear System Theory 1-1 状态空间的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
2 状态空间描述中常用的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
用矩阵表示状态空间表达式:⎪⎨+−−=u x R x x 11&1-2 线性连续系统状态空间表达式的建立1......)((b s b s b s b s Y G n n ++++−1 N(s)/D(s)的串联分解——可控标准型实现x&x x⎤⎡⎡00010L &状态变量图例1-5 已知系统微分方程:u u T y y y +=ω+ωζ+试求系统的状态空间表达式,并绘制该系统的状态变量图。
21u x x x+ζω−ω−=22&2 可观测标准型实现设可控标准型实现为例1-6 已知系统微分方程:试求可观测标准型实现,并绘制其状态变量图。
3 并联分解——Jordan标准型实现⎤⎡−s L 0001ss s s U s G 89)()(23++==例1-7 已知某系统传递函数:⎡1⎤4 矩阵的特征方程、特征值1)方阵2 线性定常连续系统状态方程的求解2-1 齐次状态方程的解⎢⎣⎥⎦⎢⎣−−=⎥⎦⎢⎣22x 32x &解:用拉氏变换的方法:例2-1 求已知状态方程的状态转移矩阵。
2-2 状态转移矩阵的性质例2-2 已知状态转移矩阵,求Φ-1和系统矩阵A。
性质9 若例2-3已知系统矩阵,求状态转移矩阵及其状态转移矩阵的逆。
非齐次状态方程:例2-4 已知状态空间描述及零初始条件,输入为单位阶跃,求状态方程的解SISO系统:例9-29 已知系统动态方程,试求系统的传递矩阵。
⎡x&9-4-2开环与闭环传递矩阵MIMOU(s)E(s)Y(s)由图可知:3-1 线性系统的可控性与可观性3-1-1 问题的提出例3-2 已知系统状态空间表达式,⎧3-2 可控性问题基本概念考虑线性系统:3-3 可观测性的基本概念3-4 线性定常系统可控性判据考虑线性定常系统:例3-3 判断已知系统的可控性。
第一部分复习大纲1.什么是线性系统?线性系统一般怎样分类?2.状态空间的描述和输入输出描述的基本概念及其关系。
3.系统状态空间描述建模。
主要是指电路、力学装置、机电装置的状态空间描述数学模型。
4.状态方程的约当标准型及其性质。
5.传递函数矩阵概念。
传递函数矩阵与状态空间描述之间的关系(已知状态空间描述求传递函数矩阵和已知传递函数矩阵进行状态空间描述实现)。
6.线性坐标变换。
7.组合系统的状态空间描述,输入输出描述建模。
8.矩阵指数函数及其性质。
9.线性系统的运动求解,系统矩阵特征值,特征向量对运动的影响。
10.脉冲响应阵与传递函数阵的关系、卷积定理。
11.状态转移矩阵及其性质。
12.线性连续系统离散化及其性质、求解。
13.连续系统与离散系统的能控性、能达性、能观性、能测性及其判据。
14.能控性指数、能观性指数、对偶原理。
15.能控能观标准型及其结构分解,结构分解后各部分与输入输出描述,状态空间描述之间的关系,会对约当标准型进行结构分解并求传递函数。
16.线性系统内部稳定、BIBO稳定概念及其性质。
17.连续和离散系统的lyapunov稳定概念及其各种判别定理,会用lyapunov方法判断连续系统、离散系统的稳定性。
18.状态反馈、输入输出反馈性能比较。
19.极点配置及其算法。
20.镇定条件、镇定与极点配置的关系(算法不考,但对一个线性系统能进行是否能镇定条件判断)。
21.解耦控制形式、分类,各种解耦方法特点,系统能否解耦判断,会进行积分型解耦算法。
22.跟踪问题及其结构框图、内模原理(会建立跟踪问题的内模)、可跟踪条件。
23.各种线性二次型最优控制问题指标含义,掌握最优控制及其性能指标求法。
24.无限时间最优控制的稳定裕度,反馈增益可摄动范围及其物理意义。
25.状态观测器设计、分类及其特点,掌握全维和降维观测器设计方法。
26.状态观测器设计与状态反馈设计之间的关系问题。
第二部分复习大纲1.多项式、多项式矩阵的基本概念。
北京化工大学
攻读博士学位研究生入学考试
《线性系统理论》考试大纲
一、适用的招生专业
控制理论与控制工程;
二、考试的基本要求
要求考试比较系统地理解线性系统状态空间设计方法的基本概念和基本理论,掌握线
性系统的状态空间分析和设计方法,要求考试具有抽象思维能力、逻辑推理能力、运算能力
和综合运用所学的知识分析问题和解决问题的能力。
三、考试的主要内容与要求
(▲表示应掌握;■表示应理解;♦表示应了解)
1.▲线性系统的状态空间描述
传递函数表达与状态空间描述之间的相互转换;代数等价;组合系统的状态空间描述。
2.线性系统的运动分析
▲状态转移矩阵的定义、性质;▲定常和时变系统的状态转移矩阵求解;▲定常和时变系统的状态运动分析;■连续系统的离散化;■离散系统的运动分析。
3.线性系统能控性和能观性分析
▲能控性及能观性定义;▲时变和定常系统的能控性及能观测性判别;■对偶原理;▲能控、能观规范型;♦结构分解。
4.线性系统稳定性分析
▲Lyapunov意义下的运动稳定性定义;■Lyapunov稳定性理论;■线性系统的Lyapunov稳定性分析;♦离散系统的状态运动稳定性及判据。
5.线性系统的综合设计理论
▲状态反馈和输出反馈的比较;极点配置问题的定义,▲极点配置条件;单变量系统的极点配置算法;■状态反馈的镇定问题;♦输入——输出静态、动态解耦的定义、条件和算法;♦跟踪控制;♦线性二次型最优问题;▲观测器的提法、分类、与存在条件;▲全维状态观测器的设计;♦降维状态观测器的设计;■观测器状态反馈控制系统及分离原理。
四、考试参考书
郑大钟,线性系统理论。
北京:化学工业出版社。