S PLC基本逻辑指令
- 格式:pptx
- 大小:734.68 KB
- 文档页数:32
三菱PLC功能指令1.位操作指令:位操作指令用于读取、写入和修改位级别的数据。
常见的位操作指令包括LD(逻辑与)、ORR(逻辑或)、AND(逻辑与)、XOR(异或)等。
2.数据操作指令:数据操作指令用于读取、写入和修改字节、字和双字级别的数据。
常见的数据操作指令包括MOV(赋值)、ADD(加法)、SUB(减法)、MUL(乘法)、DIV(除法)等。
3.计数器指令:计数器指令用于实现计数功能。
有三种类型的计数器指令:上升沿计数器、下降沿计数器和阶段计数器。
计数器指令可以用于进行数量统计、进度监测等应用。
4.定时器指令:定时器指令用于实现定时功能。
有两种类型的定时器指令:上升沿定时器和下降沿定时器。
定时器指令可以用于进行时间监测、延时操作等应用。
5.移位指令:移位指令用于将数据的位进行移动。
常见的移位指令包括SHL(左移)、SHR(右移)等。
移位指令通常用于数据处理和位拼接等应用。
6.比较指令:比较指令用于比较两个数值的大小。
常见的比较指令包括CMP(比较)、EQ(等于)、NE(不等于)、GT(大于)等。
比较指令可以用于实现条件判断和逻辑控制等应用。
7.转移指令:转移指令用于控制程序的流程。
常见的转移指令包括JMP(无条件跳转)、JE(等于时跳转)、JNE(不等于时跳转)、JG(大于时跳转)等。
转移指令可以用于实现程序的循环和条件判断等应用。
8.存储器控制指令:存储器控制指令用于读取和写入存储器的数据。
常见的存储器控制指令包括LD(读取)、ST(写入)等。
存储器控制指令可以用于实现数据存储和加载等应用。
9.数学指令:数学指令用于实现各种数学运算。
常见的数学指令包括SIN(正弦)、COS(余弦)、SQRT(平方根)等。
数学指令可以用于实现数据处理和数值计算等应用。
10.基本运算指令:基本运算指令用于实现基本的数值运算。
常见的基本运算指令包括加法、减法、乘法和除法等。
基本运算指令通常用于实现逻辑计算和数据处理等应用。
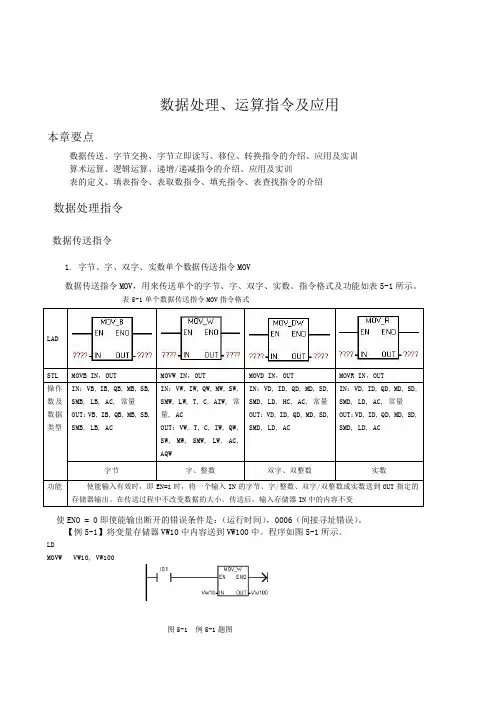
数据处理、运算指令及应用本章要点数据传送、字节交换、字节立即读写、移位、转换指令的介绍、应用及实训算术运算、逻辑运算、递增/递减指令的介绍、应用及实训表的定义、填表指令、表取数指令、填充指令、表查找指令的介绍数据处理指令数据传送指令1. 字节、字、双字、实数单个数据传送指令MOV数据传送指令MOV,用来传送单个的字节、字、双字、实数。
指令格式及功能如表5-1所示。
表5-1单个数据传送指令MOV指令格式使ENO = 0即使能输出断开的错误条件是:(运行时间),0006(间接寻址错误)。
【例5-1】将变量存储器VW10中内容送到VW100中。
程序如图5-1所示。
LDMOVW VW10, VW100图5-1 例5-1题图LADSTL MOVB IN,OUT MOVW IN,OUT MOVD IN,OUT MOVR IN,OUT操作数及数据类型IN:VB, IB, QB, MB, SB,SMB, LB, AC, 常量OUT:VB, IB, QB, MB, SB,SMB, LB, ACIN:VW, IW, QW, MW, SW,SMW, LW, T, C, AIW, 常量, ACOUT:VW, T, C, IW, QW,SW, MW, SMW, LW, AC,AQWIN:VD, ID, QD, MD, SD,SMD, LD, HC, AC, 常量OUT:VD, ID, QD, MD, SD,SMD, LD, ACIN:VD, ID, QD, MD, SD,SMD, LD, AC, 常量OUT:VD, ID, QD, MD, SD,SMD, LD, AC字节字、整数双字、双整数实数功能使能输入有效时,即EN=1时,将一个输入IN的字节、字/整数、双字/双整数或实数送到OUT指定的存储器输出。
在传送过程中不改变数据的大小。
传送后,输入存储器IN中的内容不变2. 字节、字、双字、实数数据块传送指令BLKMOV数据块传送指令将从输入地址IN 开始的N 个数据传送到输出地址OUT 开始的N 个单元中,N 的范围为1至255,N 的数据类型为:字节。
plc20个基本指令PLC的基本指令包括以下几种:
1. LD(Load):表示动合触点。
2. LDN(Load Not):表示动断触点。
3. A(And):表示与动合触点串联。
4. AN(And Not):表示与动断触点串联。
5. O(Or):表示或动合触点并联。
6. ON(Or Not):表示或动断触点并联。
7. =(Out):表示线圈输出。
8. OLD(Or Lode):块或。
9. ALD(And Lode):块与。
10. LPS(Logic Push):逻辑入栈。
11. LRD(Logic Read):逻辑读栈。
12. LPP(Logic Pop):逻辑出栈。
13. NOT(not):非。
14. NOP(No Operation):空操作。
15. END:程序结束指令。
16. MPS(Multiple Push):多重入栈。
17. MPD(Multiple Pop):多重出栈。
18. MPP(Multiple Push Pop):多重入出栈。
19. PLS(Pulse):脉冲输出指令。
20. PLF(Pulse Not):非脉冲输出指令。
以上是PLC的基本指令,不同的PLC品牌和型号可能会有一些差异,因此具体使用时需要根据实际情况选择相应的指令。
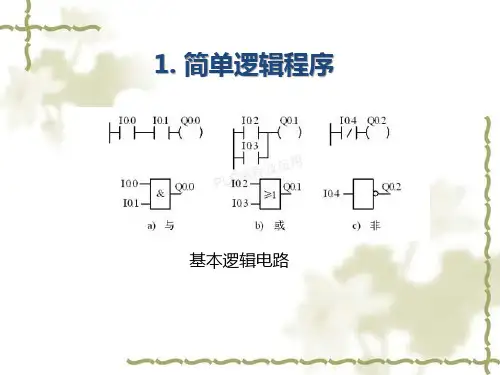
plc位逻辑指令符号
在工业自动化中,可编程逻辑控制器(PLC)通常使用特定的位逻辑指令符号来执行逻辑操作。
以下是一些常见的PLC位逻辑指令符号:
1. 常用逻辑操作符号:
• X(输入):通常表示一个输入信号。
• Y(输出):通常表示一个输出信号。
• M(内部继电器):用于内部逻辑运算和存储中间结果。
2. 基本逻辑操作符号:
• AND(与门):通常用符号"∧" 表示,例如,X1 ∧ X2 表示输入 X1 和 X2 同时为真时输出为真。
• OR(或门):通常用符号"∨" 表示,例如,X1 ∨ X2 表示输入 X1 或 X2 为真时输出为真。
• NOT(非门):通常用符号"¬" 表示,例如,¬X1 表示输入 X1 为假时输出为真。
3. 扩展逻辑操作符号:
• XOR(异或门):通常用符号"⊕" 表示,表示输入 X1 和 X2 只有一个为真时输出为真。
• NAND(与非门):表示 NOT(X1 ∧ X2),即输入 X1 和 X2 同时为真时输出为假。
• NOR(或非门):表示 NOT(X1 ∨ X2),即输入 X1 或 X2 为真时输出为假。
这些符号和逻辑操作用于创建程序,实现特定的自动化控制功能。
请注意,PLC的制造商可能会有一些差异,不同的PLC品牌和型号可能使用略有不同的符号。
西门子S指令表公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]西门子S7-200?PLC指令学习(1)S7-200系列的基本逻辑指令S7-200系列的基本逻辑指令与FX系列和CPM1A系列基本逻辑指令大体相似,编程和梯形图表达方式也相差不多,这里列表表示S7-200系列的基本逻辑指令(见表)。
表 S7-200系列的基本逻辑指令S7-200系列PLC的比较指令在SIEMENS S7-200的编程软件STEP-7中,有专门的比较指令:IN1与IN2比较,比较的数据类型可以是B、I(W)、D、R,即字节、字整数、双字整数和实数;还可以有其他的比较式:>、<、≥、≤、<>等等。
当满足比较等式,则该触点闭合。
与LMODSOFT指令对照:在LMODSOFT中,没有直接的数的比较指令,但SUB指令可以通过其执行减法功能后的三个输出端的状态实现整数的比较功能。
若与LMODSOFT 中的SUB指令对应,则在STEP-7中应有三个比较指令: >、=、< 来分别对应SUB 指令的三个输出;若还要对应≥、≤、或<>,则根据SUB指令三个输出端的不同组合,均可找到对应的比较指令。
比如:①(30007)>(40030)②(30007)=(40030)③(30007)<(40030)①+②(30007)≥②+③(30007)≤(40030)①+③(30007)<>(40030)S7-200系列PLC的定时器指令类型、编号及分辨率TON——接通延时TONR——有记忆接通延时TOF——断开延时3种分辨率(时基):1ms、10ms、100ms——分别对应不同的定时器号定时器6个要素:指令格式(时基、编号等)预置值——PT使能——IN 复位——3种定时器不同当前值——Txxx 定时器状态(位)——可由触点显示定时值=时基×预置值PT。
由于定时器的计时间隔与程序的扫描周期并不同步,定时器可能在其时基(1ms、10ms、100ms)内任何时间启动,所以,未避免计时时间丢失,一般要求设置PT预置值必须大于最小需要的时间间隔。
plc基本逻辑指令及编辑方法
PLC的基本逻辑指令及编辑方法包括以下几个部分:
1. LD(读取):表示一个与输入母线相连的常开接点指令,用于常开接点接到母线上的逻辑运算起始。
2. LDI(读取反):表示一个与输入母线相连的常闭接点指令,用于常闭接点接到母线上的逻辑运算起始。
3. AND(与指令):用于单个常开接点的串联。
4. ANI(与非指令):用于单个常闭接点的串联。
5. OR(或指令):用于单个常开接点的并联。
6. ORI(或非指令):用于单个常闭接点的并联。
7. OUT:输出指令,目标元件是Y,M,S,T,C。
8. SET(置位指令):使动作保持。
9. RST(复位指令):使操作保持复位。
10. PLS(输入信号上升沿产生脉冲输出):目标元件为Y,M,但特殊辅助继电器不能作为目标元件。
11. PLF(输入信号下降沿产生脉冲输出):目标元件为Y,M,但特殊辅助继电器不能作为目标元件。
12. INV:该指令用于运算结果的取反。
此外,还有NOP(无操作指令)和END(结束指令)等基本逻辑指令。
以上信息仅供参考,如需了解更多信息,建议查阅PLC编程相关书籍或咨询专业人士。
S7-200系列PLC顺序控制指令讲解顺序控制指令形式顺序控制指令是PLC生产厂家为用户提供的可使功能图编程简单化和规范化的指令。
S7—200 PLC 提供了三条顺序控制指令,它们的STL形式、LAD形式和功能如表7.13所示。
表7.14 顺序控制指令的形式及功能STL LAD功能操作对象LSCR bit 顺序状态开始S(位)SCRT bit 顺序状态转移S(位)SCRE 顺序状态结束无CSCRE 条件顺序状态结束无从上表中可以看出,顺序控制指令的操作对象为顺控继电器S,也把S 称为状态器,每一个S的位都表示功能图中的一种状态。
S的范围为:即S0.0~S31.7。
从LSCR指令开始到SCRE指令结束的所有指令组成一个顺序控制继电器(SCR)段。
LSCR指令标记一个SCR段的开始,当该段的状态器置位时,允许该SCR段工作。
SCR段必须用SCRE指令结束。
当SCRT指令的输入端有效时,一方面置位下一个SCR段的状态器S,以便使下一个SCR段工作;另一方面又同时使该段的状态器复位,使该段停止工作。
由此可以总结出每一个SCR程序段一般有三种功能:(1)驱动处理:即在该段状态器有效时,处理相应的工作;有时也可能不做任何工作;(2)指定转移条件和目标:即满足什么条件后状态转移到何处;(3)转移源自动复位功能:状态发生转移后,置位下一个状态的同时,自动复位原状态。
顺序控制指令的应用液压动力滑台在自动机床中被广泛采用,这里以液压动力滑台控制为例来说明顺序功能图设计方法以及顺序控制指令的使用方法。
液压动力滑台在实际工作时的运动过程一般是:快进——工进——快退。
其运动过程由快进、工进、快退三个电磁阀控制,控制系统PLC各I/O功能及地址分配如表7.15所示。
机床液压滑台控制系统如图7.50所示。
表7.15 液压动力滑台控制系统PLC I/O地址分配初始化脉冲SM0.1将初始状态S0.1置位。
当按下起动按钮时I0.0接通,S0.2置位,S0.2接通Q0.0实现快进。