北京工业大学2019年《821自动控制原理》考研专业课考试大纲
- 格式:pdf
- 大小:668.79 KB
- 文档页数:3
②南航《820⾃动控制原理》、《920⾃动控制原理(专业学位)》考试⼤纲820⾃动控制原理考试⼤纲920⾃动控制原理(专业学位)考试⼤纲《⾃动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第⼀章-⾃动控制的⼀般概念:控制系统的⼀般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作⽤;对控制系统的基本要求。
第⼆章-控制系统的数学模型:控制系统动态微分⽅程的列写;⽤拉普拉斯变换求解线性微分⽅程的零初态响应与零输⼊响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应⽤。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;⼀阶系统、⼆阶系统的阶跃响应,典型⽋阻尼⼆阶系统动态性能指标的计算;输⼊引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输⼊作⽤下,不同类型系统的稳态误差;扰动引起的误差的定义与计算⽅法;减⼩稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相⾓条件;根轨迹绘制的基本法则;⼴义根轨迹;主导极点与偶极⼦的概念及其应⽤。
第五章-线性系统的频域分析法:频率特性的概念及其图⽰法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最⼩相⾓系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正⽹络的设计;串联迟后校正⽹络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分⽅程的概念;差分⽅程的求取与求解;⾹农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-⾮线性控制系统分析知识点:⾮线性控制系统概述;常见⾮线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;⽤描述函数法判断⾮线性系统稳定性;⾃激振荡的判断、⾃振参数的确定。
855《自动控制原理》考试大纲
一、大纲综述
《自动控制原理》是北京林业大学电子信息(控制方向)专业学位硕士研究生入学考试的专业课程考试科目。
二、考试内容
1.掌握控制系统的时域、频域数学模型及梅逊公式及其应用;
2.掌握一阶系统的时域分析,二阶系统的时域分析、控制系统稳定性的概念,系统的稳
定性的劳斯判据及稳态误差的计算方法。
3.绘制系统根轨迹的规则及方法;掌握闭环系统零,极点分布及其与时域响应性能指标
之间的关系。
4.掌握系统开环频率特性和闭环频率特性的绘制,奈奎斯特稳定判据,相对稳定性及指
标,由频率特性曲线求取系统的数学模型;了解系统频域性能指标与时域性能指标之间的关系。
掌握奎斯特稳定判据、对数稳定判据的应用,以及稳定裕度计算。
5.掌握常用的校正装置及其特性,掌握串联超前校正,串联滞后校正,串联滞后-超前校
正,掌握综合校正法。
6.掌握离散控制系统概念,基本原理,了解信号的采样与保持,了解Z变换,掌握离散
系统的数学模型,掌握离散系统稳定性的判定与稳态误差的计算,了解最少拍离散控制系统,掌握离散控制系统的基本校正方法。
三、考试要求
可携带不具备存储功能的计算器
四、试题结构
1、简答题(占20分)
2、填空题(占20分)
3、计算题(占110分)
五、考试方式及时间
考试方式为闭卷、笔试,时间为3小时,满分为150分。
六、主要参考资料
胡寿松主编.《自动控制原理》第七版,北京:科学出版社,2019.1.。
851-《自动控制原理》考试大纲一、考试目标本科目考试的考目标主要是:考察考生对本自动控制原理考试大纲中涉及的基本概念、基本理论与方法掌握的熟练程度;考察考生的计算能力和基本技巧的熟悉程度;考察考生对自动控制原理应用方面的基本了解。
二、考试基本要求1. 熟练掌握本考试内容中涉及的所有基本概念和基本方法;2. 熟练掌握控制系统模型(微分方程、传递函数、频率特性)的概念、获得方法和之间的关系;3. 熟练掌握系统结构图简化、根轨迹绘制、极坐标绘制、伯德图的绘制与应用;4. 熟练掌握连续和离散控制系统性能分析的各种方法;5. 掌握控制系统设计的超前与滞后校正方法,特别是PID以及改良PID的方法;6. 熟悉本质非线性系统的描述函数和相平面分析方法。
三、考试形式与分值1.试卷满分及考试时间试卷满分为150分,考试时间180分钟。
2.答题方式答题方式为闭卷、笔试。
可使用不带存储功能的计算器。
3.试卷内容与题型结构本试卷基于理解与计算、分析与证明、综合与提高的原则,题型一般包括计算题及证明题。
四、考试内容1.控制系统导论1)自动控制系统及其任务、控制的基本方式(开/闭环控制)、负反馈控制原理2)自动控制系统的基本组成及分类、对控制系统的基本要求,掌握由系统工作原理图画出系统方块图的方法。
2.线性连续控制系统的数学模型1)动态(微分)方程的建立及线性化2)拉普拉斯反变换及应用3)传递函数、元部件的传递函数、典型环节4)结构图的建立及等效变换5)信号流图,梅逊增益公式及其应用3.线性连续控制系统的时域分析1)时域响应及性能指标,2)一阶、二阶系统的时间响应及动态性能3)高阶系统的时间响应及动态性能4)线性系统的稳定性分析5)线性系统的稳态误差6)改善系统性能的措施4.根轨迹法1)根轨迹的概念2)常规根轨迹的绘制3)广义根轨迹4)利用根轨迹定性分析系统性能5.线性系统的频域分析1)频率响应及频率特性概念,2)典型环节频率特性和系统开环频率特性3)奈奎斯特稳定判据、对数频率稳定判据及其应用4)稳定裕度(量)的概念、计算与应用5)开环对数频率特性与系统稳态性能、动态性能的关系6)闭环频率特性的特征量与时域指标之间的关系6.线性系统的频域和PID校正1)频率法串联校正的一般概念2)频率法超前/迟后校正3)PID控制器及其整定方法4)PID控制器的应用及其改良7.线性离散控制系统1)离散系统、信号的采样与保持2)z变换理论、脉冲传递函数概念,离散系统的数学模型及其求解3)离散系统的稳定性分析和稳态误差计算4)计算离散系统动态性能的一般方法8.非线性系统理论1) 描述函数概念、方法及其应用2) 相平面概念、方法及其应用五、参考书目[1] 胡寿松.自动控制原理(第五版)[M].北京:科学出版社,2007[2] 黄友锐,曲立国著. PID控制器参数整定与实现[M].北京:科学出版社,2010(注:PID部分)。
北京工业大学2018——2019学年第2学期《自动控制原理》考试试卷A卷考试说明:考试时间:95分钟考试形式(开卷/闭卷/其它):闭卷适用专业:信息学部自动化学院自动化专业、机器人工程专业承诺:本人已学习了《北京工业大学考场规则》和《北京工业大学学生违纪处分条例》,承诺在考试过程中自觉遵守有关规定,服从监考教师管理,诚信考试,做到不违纪、不作弊、不替考。
若有违反,愿接受相应的处分。
承诺人:学号:班号:。
注:本试卷共4大题,满分100分,由考试试卷.pdf和答题纸.word两个文档构成。
考试时必须使用答题纸.word文档作答,并将答案嵌入在题目下方,如因答案嵌入在其他位置而造成的成绩缺失由考生自己负责。
卷面成绩汇总表(阅卷教师填写)题号一二三四总成绩满分20202040得分得分一、填空题(每小题2分,共20分)1.自动控制系统的基本组成部分包括______、______、______和______。
2.在闭环控制系统中,控制器的作用是根据______信号和______信号之间的差异来生成控制信号。
3.比例控制器的输出信号与输入信号的比值称为______。
4.在自动控制系统中,______负责将控制信号转换为被控对象的输入信号。
5.控制系统的稳态误差是指系统输出在稳定状态下与期望输出之间的______。
6.自动化控制系统通过对生产过程的______进行监测和调节,实现生产效率和质量的提高。
7.控制系统中,______用于对反馈信号进行处理和调节,生成控制器的输入信号。
8.反馈器的作用是判别被控对象的输出与期望输出之间的______。
9.比例-______-微分(PID)控制器是常用的控制器类型之一。
10.控制系统的输入信号经过______处理后,通过______作用于被控对象,产生相应的输出。
得分二、选择题(每小题2分,共20分)1.在自动控制系统中,反馈的作用是:a)控制系统的输入信号b)提供被控对象的输入信号c)判别被控对象的输出与期望输出之间的差异d)调节比例增益2.比例控制器的输出信号与输入信号的比值称为:a)增益b)反馈c)控制信号d)误差3.开环控制系统和闭环控制系统的区别在于:a)是否有传感器b)是否有反馈c)控制器的类型不同d)开关的位置不同4.PID控制器中的"PD"代表:a)比例-微分b)比例-差分c)积分-微分d)比例-导数5.在自动控制系统中,执行器的作用是:a)测量被控对象的信号b)控制控制器的输出信号c)将控制信号转换为被控对象的输入信号d)判别被控对象的输出与期望输出之间的差异6.控制系统的稳态误差是指:a)系统输出的稳定波动范围b)控制信号的变化范围c)期望输出与实际输出之间的差异d)控制系统的输入信号与输出信号之间的误差7.变频器常用于控制:a)温度b)压力c)电流d)转速8.自动化控制系统能够实现的效果包括:a)提高生产效率和质量b)减少生产成本c)增加设备的寿命d)降低能耗9.控制系统中的传感器用于:a)测量被控对象的输入信号b)判别输出与期望输出之间的差异c)调节比例增益d)生成控制信号10.自动化原理中的反馈控制是一种:a)有源控制b)无源控制c)开环控制d)闭环控制得分三、判断题(每小题2分,共20分)当然,以下是十道判断题:1.在闭环控制系统中,控制器的输出信号根据传感器测量值和设定值之间的差异来生成。

2019 年硕士研究生招生考试大纲考试科目名称:软件工程领域专业基础考试科目代码:892一、考试要求软件工程领域专业基础考试大纲适用于北京工业大学信息学部(085212)软件工程(专业学位)的硕士研究生招生考试。
考试内容包含数据结构与算法,这门课程是软件工程领域的重要基础理论课。
考试内容主要包括数据结构的基本概念和术语、线性表、栈和队列、数组、串和广义表、树和二叉树、集合与字典、搜索结构、图和内部排序,要求考生对其中的基本概念有很深入的理解,掌握算法的设计及评价方法,具有综合运用所学知识分析问题和解决问题的能力。
二、考试内容(一)数据结构的基本概念和术语(1)掌握数据结构的基本概念和术语(2)掌握数据结构的逻辑结构、存储结构(3)熟练掌握抽象数据类型的表示方法(4)熟练掌握算法的时间复杂度、空间复杂度的分析方法(二)线性表(1)掌握线性表的逻辑结构(2)掌握线性表的顺序存储结构及插入删除、查找、遍历等操作的实现(3)掌握线性表的链式存储结构及插入删除、查找、遍历等操作的实现(三)栈和队列(1)掌握栈的定义、栈的抽象数据类型及存贮表示(2)熟练掌握栈操作的实现(3)熟练掌握递归算法(4)掌握队列的定义、队列的抽象数据类型及存贮表示(5)熟练掌握队列操作的实现及应用(四)数组、串和广义表(1)理解数组的定义、存贮表示及应用(2)理解串的定义、运算和存贮表示的特点(3)掌握串运算的算法(4)掌握广义表的定义、ADT、存贮表示(5)掌握广义表的遍历算法(五)树(1)掌握树结构的概念、术语和 ADT(2)掌握二叉树的性质和存贮表示(3)熟练掌握二叉树遍历算法及运用(4)掌握二叉树线索化技术(5)掌握树和森林的存贮表示、与二叉树的转化方法及树的遍历 (6)熟练掌握树的应用(Huffman 树)(六)集合与字典(1)掌握集合的概念、术语、ADT 及操作的实现(2)掌握字典的概念、术语、ADT 及操作的实现(七)搜索结构(1)熟练掌握静态查找技术(2)熟练掌握动态查找技术(3)掌握 B 树及链树的存贮表示与查找(4)熟练掌握哈希表技术(5)掌握查找技术的综合分析评价方法(八)图(1)掌握图的基本概念、术语和 ADT(2)掌握图的存贮方法(3)熟练掌握图的 DFS 和 BFS 搜索算法及应用(4)熟练掌握最短路径算法及应用(5)熟练掌握拓扑排序算法及应用(九)内部排序(1)掌握排序的概念及术语(2)熟练掌握插入排序、冒泡排序、选择排序、快速排序、归并排序、堆排序及基数排序算法(3)掌握排序方法的最好、最坏情况分析三、参考书目1、殷人昆编著. 数据结构(用面向对象方法与 C++语言描述) (第 2 版). 清 华大学出版社,2012-09-012、严蔚敏等编著,数据结构(C 语言版)。
中国地质大学(北京)2023年硕士研究生入学考试《自动控制理论(822)》考试大纲与参考书目
5.控制系统的校正
常用校正装置及其特性,用超前校正方法、滞后校正方法以及滞后-超前校正对控制系统进行设计和校正,PID控制器及其参数的整定。
6.离散控制系统
Z变换理论,信号的采样与复现,脉冲传递函数,差分方程,离散控制系统的性能分析与数字校正。
7.非线性控制系统
非线性控制系统的特征,奇点与极限环,非线性控制系统的描述函数法分析,非线性系统的相平面分析。
参考书目
胡寿松主编,自动控制原理(第六版),北京:科学出版社,2013.
备注。
2019年内蒙古工业大学考研专业课初试大纲初试自命题考试大纲科目名称自动控制原理科目代码827一、考试范围及要点1、控制系统的数学模型掌握传递函数的概念、性质和求取。
掌握简单系统数学模型的建立。
掌握结构图与信号流图的绘制及关系,结构图的等效变换和运用梅逊公式求系统传递函数的方法。
2、线性系统时域分析法掌握系统稳定性概念及稳定的充要条件,能够熟练运用劳斯稳定判据判断系统的稳定性,并进行相关的分析计算。
正确理解稳态误差的概念,掌握稳态误差的计算。
掌握二阶系统的数学模型、极点位置与动态性能之间的相互关系。
掌握欠阻尼二阶系统特征参数、典型时域响应及动态性能指标计算。
理解主导极点的概念,能估算高阶系统的性能指标。
3、线性系统的根轨迹法正确理解根轨迹的概念。
掌握根轨迹绘制的基本法则。
掌握绘制常规根轨迹、参数根轨迹和零度根轨迹的方法。
能够根据根轨迹定性分析系统指标随参数变化的趋势。
4、线性系统的频域分析法掌握频率特性的概念。
掌握绘制开环系统幅相曲线、近似对数频率特性曲线的方法,以及应用频率稳定判据判断系统的稳定性的方法。
掌握相角裕度和幅值裕度的概念及计算。
了解闭环频率特性的概念和绘制方法,掌握系统时域指标与频域指标之间的关系。
掌握用实验数据和对数频率特性曲线确定最小相位系统的传递函数。
5、线性系统的校正方法掌握常用校正网络频率特性,能正确选择校正方式,重点掌握串联校正的设计方法。
了解反馈校正的设计方法。
6、线性离散系统的分析与校正理解脉冲传递函数的定义,掌握Z域稳定性判定方法、稳态误差的分析方法。
了解离散系统响应的求解方法。
7、非线性控制系统分析掌握分析非线性系统的相平面法和描述函数法。
8、线性系统的状态空间分析与综合掌握线性系统状态空间表达式的建立方法,掌握状态转移矩阵的性质及计算。
掌握可控性与可精都考研网(专业课精编资料、一对一辅导、视频网课)。
河南工业大学2019考研大纲:829自动控制原理河南工业大学2019考研大纲:829自动控制原理已公布,更多考研资讯请关注我们网站的更新!河南工业大学2019考研大纲:829自动控制原理考试科目代码:829《自动控制原理》课程考试旨在考察学生对自动控制系统的基本概念、基本原理及基本分析方法的掌握和运用,着重考察学生应用适当数学工具和基本原理,用不同方法对系统进行分析的能力。
本门课程考核要求由低到高共分为“了解”、“掌握”、“熟练掌握”三个层次。
其含义:了解,指学生能懂得所学知识,能在有关问题中认识或再现它们;掌握,指学生清楚地理解所学知识(例如定理的条件与结论,公式的表述与使用范围等),并且能在基本分析和简单应用中正确地使用它们;熟练掌握,指学生能较为深刻理解所学知识,在此基础上能够准确、熟练地使用它们分析解决较为简单的实际问题。
一.考核内容与考核目标本课程的考试内容与考核目标内容为:1.控制系统的数学模型及建模:系统传递函数的概念,控制系统结构图的等效化简方法,梅逊公式及其化简方法。
2.时域分析方法:时域稳定性判据,利用稳定性判据确定系统临界稳定参数;系统稳态误差的求解,消除稳态误差的方法;二阶系统动态品质的计算公式,高阶系统的主导极点分析方法。
3.线性定常系统的根轨迹法:绘制根轨迹(180度、零度)的八大法则;利用系统等效开环传递函数的概念绘制参数根轨迹;运用根轨迹法,分析系统中参数的稳定范围。
4.频域分析方法:系统开环Nyquist图的绘制、Bode图的绘制;Nyquist、Bode稳定判据;计算系统的幅值裕度和相角裕度;系统频域指标的计算。
5.控制系统的校正:分析法(试探法)和综合法(期望特征法);串联超前校正、迟后校正及迟后-超前校正。
二.分章节的考核知识点第一章自动控制的一般概念掌握反馈控制的基本概念。
第二章控制系统的数学模型1.了解控制系统常用元部件的传递函数;2.掌握控制系统结构图的绘制方法及串联、并联、反馈三种基本等效变换;3.用等效变换方法或梅森公式求系统结构图或信号流图的各种传递函数。
2019年北京工业大学896《数据结构》考试大纲一、考试要求数据结构考试大纲适用于北京工业大学信息学部(085211)计算机技术(专业学位)领域的硕士研究生招生考试。
数据结构课程是计算机技术领域(专业学位)的重要基础课。
考试内容主要包括基本数据结构、排序、索引、检索、高级数据结构等内容,从逻辑结构的角度包括线性表、栈、队列、二叉树、树和图等各种基本数据结构;从算法的角度包括各类排序、检索和索引算法。
要求考生对其中的基本概念有很深入的理解,掌握数据结构与算法的基本概念、合理组织数据的基本方法、高效处理数据的基本算法、并具备面对实际问题选择恰当数据结构与相应算法的能力。
二、考试内容1.数据结构的相关概念、算法概念、算法性质及算法分析(时间复杂度与空间复杂度);2.线性表逻辑结构定义、存储结构的表示,以及在特定存储结构下线性表基本运算的算法实现;3.栈与队列的逻辑结构定义、存储结构的表示,基本操作特点,栈与队列的基本应用;4.串的逻辑结构定义,基本操作的含义与实现;5.数组定义及其顺序存储,矩阵的压缩存储,广义表定义及存储结构;6.树的定义与存储结构,二叉树的定义与性质、存储结构,二叉树遍历算法(三序遍历与按层遍历),赫夫曼树与赫夫曼编码以及二叉树基本算法的实现与应用;7.图的定义与术语,图的存储结构,图的遍历(深度优先搜索与广度优先搜索),最小生成树、拓扑排序以及最短路径的求解;8.查找的相关概念,静态查找表(顺序表的查找与有序表的查找),动态查找表(二叉排序树),B-树,B+树,AVL 树,哈希表的相关概念;9.排序的相关概念,掌握插入排序、冒泡排序、快速排序、简单选择排序、堆排序、归并排序、基数排序等算法的执行过程、时空复杂度、稳定性以及使用场合。
三、参考书目1.严蔚敏吴伟民.《数据结构》(C 语言版),清华大学出版社,2011。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
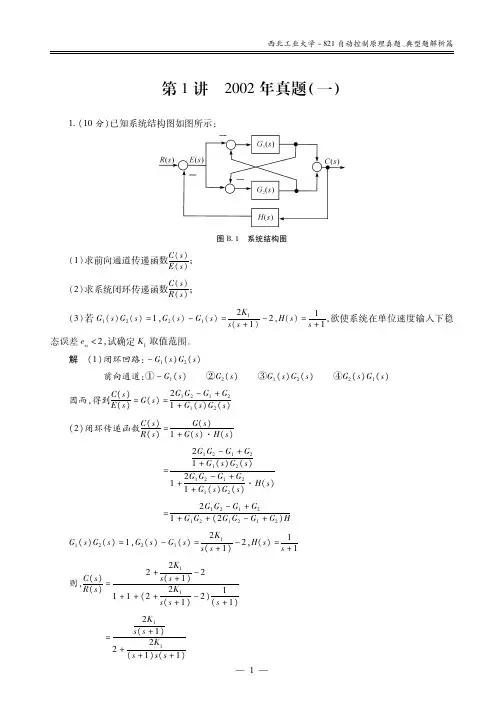
北京理工大学810《自动控制原理》历年考研真题目录北京理工大学1999年《自动控制原理》考研真题 (2)北京理工大学2000年《自动控制原理》考研真题 (4)北京理工大学2001年《自动控制原理》考研真题 (7)北京理工大学2002年《自动控制原理》考研真题 (9)北京理工大学2003年《自动控制原理》考研真题 (13)北京理工大学2004年《自动控制原理》考研真题 (16)北京理工大学2005年《自动控制原理》考研真题 (19)北京理工大学2006年《自动控制原理》考研真题 (22)北京理工大学2007年《自动控制原理》考研真题 (26)北京理工大学2008年《自动控制原理》考研真题 (29)北京理工大学2009年《自动控制原理》考研真题 (33)北京理工大学2010年《自动控制原理》考研真题 (35)北京理工大学2011年《自动控制原理》考研真题 (38)北京理工大学2012年《自动控制原理》考研真题 (40)北京理工大学2013年《自动控制原理》考研真题 (41)北京理工大学2014年《自动控制原理》考研真题 (44)北京理工大学2015年《自动控制原理》考研真题 (46)北京理工大学2016年《自动控制原理》考研真题 (48)北京理工大学2017年《自动控制原理》考研真题 (52)北京理工大学2018年《自动控制原理》考研真题 (54)北京理工大学2019年《自动控制原理》考研真题 (55)附录: (58)北京理工大学810《自动控制原理》考研大纲 (58)历年真题参考答案 (59)北京理工大学1999年《自动控制原理》考研真题北京理工大学2000年《自动控制原理》考研真题北京理工大学2001年《自动控制原理》考研真题一、(15分)控制系统的框图如图1所示,其中0k。
北京理工大学2002年《自动控制原理》考研真题北京理工大学2003年《自动控制原理》考研真题北京理工大学2004年《自动控制原理》考研真题北京理工大学2005年《自动控制原理》考研真题北京理工大学2006年《自动控制原理》考研真题北京理工大学2007年《自动控制原理》考研真题北京理工大学2008年《自动控制原理》考研真题北京理工大学2009年《自动控制原理》考研真题北京理工大学2010年《自动控制原理》考研真题北京理工大学2011年《自动控制原理》考研真题一、北京理工大学2012年《自动控制原理》考研真题北京理工大学2013年《自动控制原理》考研真题七.非线性系统分析:北京理工大学2014年《自动控制原理》考研真题(2)当输入r(t)在用叠加定理证明:当t≥tp时,y(t)=1;第三题往年出过,这里不再重复。