轮系2
- 格式:ppt
- 大小:3.51 MB
- 文档页数:56

《机械原理》轮系的类型轮系是机械原理中一个非常重要的概念,它是由多个齿轮或带轮组成的传动装置。
轮系通过齿轮或带轮之间的啮合来实现传递动力和转速的目的。
根据齿轮或带轮的不同组合方式和传动特点,轮系可以分为很多类型。
本文将详细介绍几种常见的轮系类型。
1.平行轮系平行轮系是最简单、最常见的轮系类型之一、它由两个平行安装的齿轮组成,以实现动力的传递和转速的变化。
平行轮系的传动比可以通过计算齿轮的齿数比值来确定,即传动比=齿轮B的齿数/齿轮A的齿数。
2.轴垂直平行轮系轴垂直平行轮系是由两个齿轮组成的轮系,齿轮A和齿轮B的轴线相互垂直,但都与一个平行于它们的中心轴线垂直。
这种轮系常用于传递转速的变化和动扭矩的传递。
3.交直齿圆柱齿轮轮系交直齿圆柱齿轮轮系是一种特殊的轮系,它由一个斜齿轮和一个直齿轮组成,斜齿轮的齿槽呈斜角,直齿轮的齿槽呈直角。
这种轮系可以实现轴线之间的转向,同时还可以传递动力和转速。
4.内外啮合轮系内外啮合轮系是由一个内啮合齿轮和一个外啮合齿轮组成的轮系,它们的齿轮的齿槽相互啮合。
这种轮系常用于箱式传动装置中,可以实现动力的传递和转速的变化。
5.铰链轮系铰链轮系是一种特殊的轮系,它由两个齿轮组成,它们的齿轮轴线在一定的位置处连接成一个铰链。
这种轮系可以实现平行轮系和轴垂直平行轮系的转变,常用于一些特殊场合。
6.摆线针轮轮系摆线针轮轮系是一种特殊的轮系,它由一个摆线针轮和一个齿轮组成,摆线针轮的齿轮轴线在一定的位置处连接成一个摆线。
摆线针轮轮系能够实现平行轮系和轴垂直平行轮系的转变,并且具有较高的传动效率和较小的传动误差。
以上是几种常见的轮系类型,它们在不同的应用场合下具有各自独特的优缺点和适用性。
掌握轮系的类型和特点能够帮助我们更好地理解和应用轮系在机械传动中的作用和原理。

轮系(2)学案编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(轮系(2)学案)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为轮系(2)学案的全部内容。
机械基础学案第六章 轮系(§6—2定轴轮系传动比计算)【使用课时】2课时【学习目标】1、掌握定轴轮系转动方向的确定和传动比大小的计算。
【学习重点、难点】1、定轴轮系转动方向的确定和传动比大小的计算。
2、定轴轮系转动方向的确定和传动比大小的计算。
【学习方法】在理解的基础上多背多记【学习导向问题】一、课前预习1、 如何判断定轴轮系的转动方向?2、 定轴轮系传动比?二、学习过程定轴轮系的传动比计算包括轮系传动比的大小和确定末轮的转向。
1、定轴轮系中各轮转向的判定(参阅课本P78表6—4)(1) 一对圆柱齿轮传动,外啮合时两轮转向相反其传动比规定为负;一对内啮合圆柱齿轮,两转转向相同,其传动比规定为正。
(2)两轮的旋转方向也可以用画箭头的方法表示。
两轮旋转方向相反,画两反向箭头, 两轮旋转方向相同,画两同向箭头。
箭头方向表示可见侧面的圆周速度的方向。
(3)轮系中各齿轮轴线互相平行时,若外啮合齿轮的对数是偶数,则首轮与末轮的转向相同;若为奇数,则相反。
4)对于轮系中含有圆锥齿轮、蜗轮蜗杆、齿条传动,只能用画箭头的方法来表示齿轮的转向。
2、传动比的计算(1)传动路线(2)传动比 轮系中首末两轮的转速(或角速度)比,称为轮系的传动比,用i•表示。
即:i•211n n i k(3)传动比的计算定轴轮系的传动比等于组成该轮系的各对齿轮传动比的连乘积;首末两轮的转向由轮系中外啮合齿轮的对数决定。



![[机械原理]轮系2行星轮系的效率](https://img.taocdn.com/s1/m/260e47e6e518964bce847c92.png)




第1章轮系轮系是指多个齿轮或其它传动轮组成的传动系统。
它广泛应用于各种机器之中,实现复杂的传动功能。
本章的重点是在轮系中各传动齿轮的齿数和主动齿轮转速已知的情况下,计算其它齿轮的转速,或者计算任意两齿轮的转速之比——传动比。
§1-1 轮系及其分类前一章研究的是一对齿轮的啮合原理和几何设计等问题,由一对齿轮啮合组成的传动系统是齿轮传动最简单的形式。
在实际机械传动中,为了获得大传动,实现变速、换向及远距离传动等各种不同的工作需要,经常采用若干个相互啮合的齿轮传递运动和动力。
这种由一系列齿轮构成的传动系统称为轮系。
根据轮系在运转过程中各轮几何轴线在空间的相对位置关系是否固定,可以将轮系分为定轴轮系和周转轮系两大类。
一定轴轮系轮系运转时,所有齿轮几何轴线的位置都固定不变的轮系称为定轴轮系,如图7-1所示。
定轴轮系中,若各齿轮的几何轴线相互平行,则称为平面定轴轮系(如图7-1a所示),否则称为空间定轴轮系(如图7-1b所示)。
(a) 平面定轴轮系(b) 空间定轴轮系图1-1定轴轮系二周转轮系轮系运转时,至少有一个齿轮几何轴线的位置相对机架不固定的轮系称为周转轮系,如图7-2所示。
周转轮系中,几何轴线固定的齿轮称为中心轮或太阳轮,如图7-2中的齿轮1和齿轮3,用符号K表示,中心轮可以是转动的,也可以是固定的;几何轴线位置不固定,既可以自转又可以公转的齿轮称为行星轮,如图7-2中的齿轮2;支持行星轮作自转和公转的构件称为行星架,也称为转臂或系杆,用符号H表示。
一个周转轮系中,中心轮和行星架的几何轴线必须重合,否则周转轮系不能运动。
(a) 差动轮系(b) 行星轮系图1-2周转轮系周转轮系的种类很多,通常可以按照以下两种方法分类:1、按照周转轮系所具有的自由度数目分类:⑴差动轮系自由度数目为2的周转轮系称为差动轮系,如图7-2a所示。
为了使其具有确定的运动,该轮系需要2个具有独立运动的主动件。
⑵行星轮系自由度数目为1的周转轮系称为行星轮系,如图7-2b所示。
定轴轮系课程名称机械基础授课班级高二综合预科班授课地点教室(多媒体设备)课 时6课时学习单元定轴轮系课 题定轴轮系教学内容 1.定轴轮系的传动比的计算方法及各轮回转方向的判定;2.定轴轮系末端带移动件的传动计算;3.定轴轮系中齿轮受力分析。
教学目标【知识目标】1.掌握定轴轮系传动比的计算方法及各轮回转方向的判定;2.掌握定轴轮系末端带移动件的传动计算;3.掌握定轴轮系中齿轮受力分析。
【能力目标】1.知识的获取、消化和吸收;2.分析判断、解决问题的能力;3.利用分解组合法应用知识的能力。
【情感目标】1.语言表达能力;2.团队意识。
教学重点 1.定轴轮系的识读、传动路线的分析。
2.定轴轮系传动比的计算、各轮回转方向的判定、末端带移动件的传动计算分析。
教学难点定轴轮系各部分知识的综合运用。
行为能力分析【专业能力】熟练绘制定轴轮系,领会定轴轮系的识读,掌握定轴轮系传动比的轮回转方向的判定、末端带移动件的传动计算和齿轮受力分析。
【方法能力】知识的获取和消化吸收,分析判断、解决问题,分解组合应用,自学能力;【社会能力】语言表达、团队意识、展示技术。
教学方法任务式教学法、模块化教学法、多媒体演示法、分解组合教学法、分组测试教具多媒体课件、实物投影仪教学设计过程教学环节教 学 内 容【任务发布与分解】【定轴轮系部分任务单】(该类题目为高考必考题)现有一定轴轮系,已知各齿轮齿数Z1=20,Z2=40,Z3=15,Z4=60,Z5=18,Z6=18,Z7=1,Z8=40,Z9=20,齿轮9的模数m=3mm,齿轮1的转向如箭头所示,n1=100r/min,请完成一下任务:【任务一】用箭头法判别齿条10的移动方向?【任务二】计算出传动比i18?【任务三】确定蜗轮8的转速n8为多少?(r/min)【任务四】计算齿条10移动的速度v6为多少?(m/s)(注:了解其他几种末端形式,并分别掌握其移动速度计算。
)【任务一】用箭头法判别齿条10的移动方向?【复习回顾】1.一对齿轮传动类型:(1)另外包括齿条传动、螺旋传动、毂轮提升重物几种情况2.两对及以上情况:【任务一】3.轮系中惰轮的定义和作用轮系中,只改变齿轮副中从动轮回转方向,而不改变齿轮副传动比大小的齿轮称为惰轮。

轮系一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以 运动,也可以 运动。
18.采用周转轮系可将两个独立运动 为一个运动,或将一个独立的运动 成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。

行星轮系和差动轮系的自由度分别为1和2行星轮系和差动轮系,作为传动装置中常见的两种形式,分别具有自己独特的特点和应用范围。
掌握这两种传动装置的工作原理和特性,对于工程师和学习者来说,具有重要的指导意义。
首先,我们来介绍行星轮系。
行星轮系是一种将输入轴的运动转换为输出轴的转动的机械装置。
它由一个太阳齿轮、若干行星齿轮和一个环形齿轮组成。
其自由度为1,即只有一个输入轴和一个输出轴。
行星齿轮围绕在太阳齿轮的周围运动,同时也与环形齿轮相连。
这种转动方式使得行星齿轮的转速相对于太阳齿轮的转速有所变化。
行星轮系的主要特点是紧凑、平稳和高扭矩传递。
由于行星齿轮齿数较多,它能够实现大速比的传动,同时承受较大的负载。
行星轮系广泛应用于车辆传动系统、工业机械和航空航天器件等领域,为各种工程应用提供了高效可靠的动力传输。
接下来,我们来介绍差动轮系。
差动轮系是一种将输入轴的运动转换为两个输出轴的机械装置。
它由一个输入轴、两个输出轴和若干齿轮组成。
其自由度为2,即具有两个输出轴可以相对独立地转动。
差动齿轮以独特的方式将输入轴的运动分配给两个输出轴,在转动过程中能够自由地调节两个输出轴的转速和转矩。
差动轮系的主要特点是高度灵活、转向稳定和扭矩平衡。
它在汽车驱动系统中得到广泛应用,例如常见的前驱和四驱车型。
差动轮系能够通过差速器的调节,使得两个输出轴在转向时具有平衡的特性,同时能够根据行驶路况自动调整转矩分配,提高车辆的操纵稳定性和驱动性能。
通过对行星轮系和差动轮系的介绍,我们可以看到它们在传动装置中的重要作用和不可替代的价值。
学习和掌握这两种传动装置的工作原理和特性,将为我们设计和应用传动系统提供重要的指导意义。
在工程实践中,根据具体的应用需求,选择合适的传动装置,将会取得更好的传动效果和性能表现。
同时,深入研究和改进行星轮系和差动轮系,也将推动传动技术的发展进步,为各个领域的工程应用提供更加可靠和高效的解决方案。

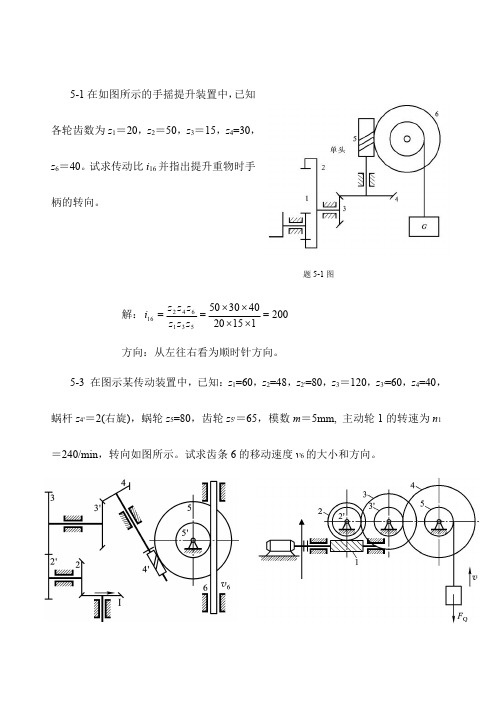
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。
