六点定位原理及方法概要
- 格式:doc
- 大小:1.44 MB
- 文档页数:2
什么是六点定位原理
六点定位原理是一种用于确定物体空间位置的方法。
它基于一个简单的观察:当一个物体在三维空间中移动时,我们可以通过观察该物体在不同位置上的六个特征来确定其准确位置。
这六个特征分别是:三个坐标轴上的位置(x、y、z)和三个欧
拉角(俯仰角、偏航角、滚转角)。
坐标轴上的位置定义了物体在空间中的位置,而欧拉角则定义了物体围绕自身坐标轴的旋转程度。
通过测量物体在不同位置上的这六个特征,并利用三角学和几何学的原理进行计算和推导,可以精确确定物体在三维空间中的位置。
与其他定位方法相比,六点定位原理具有较高的精度和准确性。
由于它基于物体在空间中的真实位置和旋转角度进行计算,可以有效地避免误差积累和歧义。
六点定位原理在许多领域都有广泛应用。
例如,在机器人导航中,机器人可以通过测量其周围环境中固定物体的六个特征来确定自身的位置和姿态。
在虚拟现实技术中,通过追踪用户头部的六个特征,可以实现对用户视角的准确跟踪和呈现。
此外,在航空航天、医疗设备和工业生产等领域,六点定位原理也被广泛应用于精确定位和姿态控制的问题上。
总之,六点定位原理是一种基于物体在空间中位置和旋转角度的观察记录和计算,用于确定物体在三维空间中位置的方法。
它具有高精度和准确性,并在多个领域有广泛应用。
简述六点定位原理六点定位是一种常用的定位方法,通过收集或测量目标物体在不同位置上的信号强度来推算目标物体的位置。
这种定位方法主要应用于室内定位、室内导航和物体追踪等领域。
下面将详细介绍六点定位原理的相关内容。
1. 发送信号源:六点定位中的一种基本方法是利用无线信号作为发送信号源。
常见的信号源包括无线电、WiFi、蓝牙、红外线等。
这些信号源通过向周围发送无线信号,并在信号源周围突然中断,可以推算出目标物体的位置。
2. 接收器:接收器是用于接收信号源发出的信号。
在六点定位中,可以使用多个接收器来接收信号源发出的信号,并根据信号的强度来推算目标物体的位置。
接收器可以是专用的硬件设备,也可以是智能手机、平板电脑等装备内置的无线收信模块。
3. 信号强度:信号源发出的信号会经过物体的阻挡和衰减。
接收器通过测量信号强度来判断目标物体的位置。
信号强度是一个基本的定位参数,可以根据信号源和接收器之间的距离、传输介质的特性等因素进行计算和推算。
4. 多点定位:六点定位一般需要至少三个接收器来接收信号源发出的信号。
根据接收器接收到的信号强度,可以确定目标物体与每个接收器之间的距离,进而通过三角定位等方法计算目标物体的准确位置。
如果使用更多的接收器,可以提高定位的准确性和可靠性。
5. 数据处理:接收到信号强度后,需要进行一系列的数据处理操作。
这包括信号强度的滤波、数据校正、测量误差的修正等。
数据处理能够提高定位的精度和可靠性,减少误差的影响。
6. 地图匹配:在六点定位中,将目标物体的位置与现有的地图进行匹配是一个重要的步骤。
在定位过程中,可以使用预先构建好的地图,或者通过实时采集数据构建地图。
地图匹配可以进一步提高定位的准确性,同时可以用于导航和路径规划等应用。
以上是关于六点定位原理的相关参考内容。
六点定位是一种利用无线信号和接收器进行目标物体定位的方法,通过测量信号强度和多点定位等技术,可以实现室内定位、室内导航以及物体追踪等应用。
六点定位基本原理
六点定位基本原理是指通过在空间中的六个位置固定的基站(或者天线),来确定目标物体的位置。
具体原理如下:
1. 基站发射无线信号,这些信号会经过空气等介质传播。
2. 目标物体接收到多个基站发射的信号,并记录下每个信号的到达时间。
3. 通过计算信号的到达时间差,可以确定目标物体到每个基站的距离。
4. 利用三角测量原理,可以通过这些距离确定目标物体的位置。
六点定位通常采用三角测量和多普勒效应等技术来计算目标物体的位置。
其中,三角测量法是最常用的方法,利用目标物体到不同基站的距离形成的三角形进行位置计算。
而多普勒效应是通过目标物体对接收到的信号产生的频率变化来计算目标物体的运动速度。
六点定位的精确性和稳定性取决于基站的部署和精确度,以及测量和计算的准确性。
所以在实际应用中,需要根据具体情况来选择合适的基站数量、位置和技术手段,以达到精准定位的要求。
工件的六点定位原则
答案:
一、几何中心定位
几何中心定位是指通过机械加工根据产品的设计图纸测算出几何中心坐标的方式进行定位,主要用于精度较高的产品加工中,例如精密模具、精密零件等。
几何中心定位可以保证产品准确度和稳定性。
二、角点定位
角点定位是指将产品放置在定位工作台上,将其与工作台上的角点对齐而进行的定位方式。
以该角为线性定位,通常用于钣金成形加工中的角铆件或者是箱体加工等,具有很好的刚性定位特性。
三、圆心定位
圆心定位指的是对于直线和圆形的产品进行加工定位时,通过定位圆心坐标的方式来实现。
通常用于加工圆形和弧形零件等,圆心定位精度高,容易实现。
四、平面定位
平面定位是通过将产品放置在定位工作台上的面板上,利用平板和工作台的互相嵌合实现的定位方式。
具备很高的精度和稳定性,通常用于加工平面和薄板等零部件。
五、法线定位
法线定位是指将产品固定在工作台上,以产品轴线与法线的交点为基准点,进行定位。
较常见的应用领域就是对于轴类和轮廓零件的加工,例如机械中的转轴、滚动轴承等。
六、斜面定位
斜面定位和角点定位类似,指的是通过使用定位台上的斜向刻度来对产品进行定位的方式。
通常用于平面零部件的加工定位,例如机壳体等。
以上六种定位方式各有其适用场景和使用技巧,掌握正确的定位方法对于保证产品加工质量有着非常重要的作用。
一些较为简单的零部件可以使用单一的定位方式,而对于复杂的零部件可能需要综合使用多种定位方式来实现更高的定位精度和稳定性。
简述六点定位原理的含义
六点定位原理是一种相对定位的方法,它是通过收集和分析物体相对于六个不同位置的信号来确定物体的精确位置。
这些信号可以是无线电、声音、激光、红外线等。
这种定位原理可以应用于集装箱、汽车、移动设备等各种物体的定位和追踪。
它可以提供高精度的定位信息,使得用户可以准确跟踪物体的位置、移动路径和速度。
六点定位原理的含义是通过六个不同位置的信号来进行定位,这些信号可能是来自于不同的传感器或设备。
根据这些信号的强弱、到达时间和其他特征,可以计算出物体相对于这六个位置的距离和角度,从而确定其精确位置。
六点定位原理的优势在于可以提供精确的定位信息,不受地理环境和天气条件的限制。
它可以应用于室内和室外环境,使得用户可以方便地追踪物体的位置和移动。
然而,六点定位原理也存在一些限制。
例如,它对设备和传感器的要求较高,需要较复杂的算法和计算能力来处理信号数据。
此外,多个信号可能会相互干扰,导致定位结果的误差。
总之,六点定位原理是一种基于收集和分析物体相对于六个不同位置的信号来进行定位的方法。
它可以提供高精度的定位信息,适用于各种应用场景。
然而,它也存在一些限制需要克服。
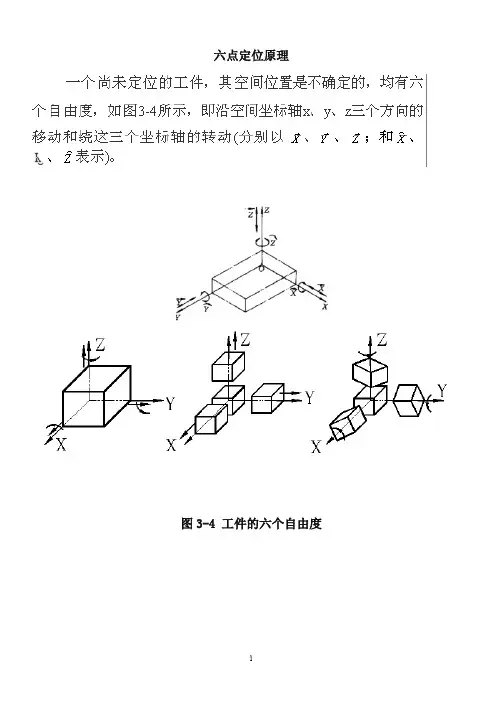
六点定位原理图3-4 工件的六个自由度图3-5 长方体形工件的定位一、六点定位原则一个尚未定位的工件,其位置是不确定的。
如图 3-29 所示,将未定位的的工件(长方体)放在空间直角坐标系中,长方体可以沿 X 、 Y 、 Z 轴移动有不同的位置,也可以绕 X 、 Y 、 X 轴转动有不同的位置,分别用、、和、、表示。
用以描述工件位置不确定性的、、、、、合称为工件的六个自由度。
其中、、称为工件沿 X 、 Y 、 Z 轴的移动自由度,、、称为工件绕 X 、 Y 、 Z 轴的转动自由度。
工件要正确定位首先要限制工件的自由度。
设空间有一固定点,长方体的底面与该点保持接触,那么长方体沿 Z 轴的移动自由度即被限制了。
如果按图 3-30 所设置六个固定点,长方体的三个面分别与这些点保持接触,长方体的六个自由度均被限制。
其中 XOY 平面上的呈三角形分布的三点限制了、、三个自由度; YOZ 平面内的水平放置的两个点,限制了、二个自由度; XOZ 平面内的一点,限制了一个自由度。
限制三个或三个以上自由度的称为主要定位基准。
这种用适当分布的六个支承点限制工件六个自由度的原则称为六点定位原则。
支承点的分布必须适当,否则六个支承点限制不了工件的六个自由度。
例图 3-30 中XOY 平面内的三点不应在一直线上,同理, YOZ 平面内的两点不应垂直布置。
六点定位原则是工件定位的基本法则,用于实际生产时起支承作用的是有一定形状的几何体,这些用于限制工件自由度的几何体即为定位元件。
表 3-10 为常用定位元件能限制的工件自由度。
二、由工件加工要求确定工件应限制的自由度数工件定位时,影响加工精度要求的自由度必须限制;不影响加工精度要求的自由度可以限制也可以不限制,视具体情况而定。
按照工件加工要求确定工件必须限制的自由度是工件定位中应解决的首要问题。
例如图 3-31 所示为加工压板导向槽的示例。
由于要求槽深方向的尺寸 A 2 ,故要求限制 Z 方向的移动自由度;由于要求槽底面与 C 面平行,故绕 X 轴的转动自由度和绕 Y 轴的转动自由度要限制;由于要保证槽长 A 1 ,故在 X 方向的移动自由度要限制;由于导向槽要在压板的中心,与长圆孔一致,故在 Y 方向的移动自由度和绕 Z 轴的转动自由度要限制。
工件的六点定位原则一、概述工件的定位和夹紧是机械制造工艺中十分重要的技术内容之一,因为零件在加工时在机床上的正确安装(定位和夹紧)与否是获得合格零件的关键,保证加工时刀具与工件之间正确加工位置,就是说是保证零件的尺寸精度、形状和位置精度以及合格的表面质量等重要技术要求的关键。
二、六点定位原则(一)六个自由度:物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。
因此,要完全确定物体的位置,就必须消除这六个自由度。
(二)工件加工时限制自由度的目的:的相互位置精度。
(三)工件的六点定位原则:(工件图例说明)该工件需要保证槽子的位置尺寸是:A±△A、B ±△B、C ±△ C要保证A±△A要保证B±△B要保证C±△C(四)定位支承点的合理分布:如果定位支承点如图分布,将有以下自由没法限制,即为:使工件产生绕Y轴和Z轴的旋转而无法保证A±△A、B ±△B的加工精度定位支承点像这样在同一条直线上,是绝对不允许的,属不合理分布。
二、六点定位原则的应用(一)分析模型的建立1、建立三位坐标系2、设立分析平面一个大平面(三点):限制一个移动和两个转动一个狭长平面(两点):限制一个移动和一个转动一个小平面(一点):限制一个移动(如图)(二)投影(1)对工件与夹具定位元件的接触面按其特点分别往三个坐标平面上投影。
(2(3(三)定位分析1、套类工件在芯轴上的定位:投影结果:1)XOY面限制了2)YOZ面限制了(2)圆柱形工件在V型贴上定位:1)圆柱在两个短V型铁上定位限制了:2)思考:A)圆柱体在长、短V型铁上定位。
B)圆柱体在车床上两顶尖安装时的定位。
6点定位原理
6点定位是一种基于多点触控技术的定位方法。
它通过在屏幕上布置6个特定位置的传感器来捕捉用户手指的触摸。
这些传感器会感知到用户手指在屏幕上的位置,然后将这个信息传递给设备的操作系统。
在设备的操作系统中,会使用一些算法来计算并确定用户手指触摸的准确位置。
通过使用多点触控技术,6点定位可以实现更准确的触摸定位,从而提供更流畅的用户体验。
6点定位的原理是基于传感器的运作方式。
这些传感器使用了电容感应技术,它们会感应到用户手指触摸的位置,并将这个位置信息转换成电信号。
然后,设备的操作系统会解读这些电信号,并计算出用户手指触摸的具体位置。
通过使用6个传感器,设备可以获得更多的触摸信息,从而提供更精确的定位。
这种多点触控的定位方法可以广泛应用于触摸屏设备,如智能手机、平板电脑和触摸屏电脑等。

六点定位原理在机械制造领域,六点定位原理是一个至关重要的概念。
它就像是基石,为各种加工和装配操作提供了稳定的基础。
想象一下,我们要把一个物体固定在一个空间中,不让它有任何移动或者转动的可能性。
这该怎么做呢?六点定位原理给出了答案。
六点定位原理指的是,要完全限制一个物体在空间的位置,需要用六个按一定规则布置的约束点来限制物体的六个自由度。
这六个自由度分别是沿三个坐标轴的移动自由度,以及绕三个坐标轴的转动自由度。
我们先来看看沿坐标轴的三个移动自由度。
假设一个物体可以在 X 轴方向上自由移动,那它在这个方向上的位置就是不确定的。
同样,在 Y 轴和 Z 轴方向上,如果物体能自由移动,它在这两个方向上的位置也无法固定。
接下来是绕坐标轴的三个转动自由度。
如果一个物体能绕 X 轴自由转动,那么它的姿态就会发生变化;绕 Y 轴和 Z 轴也是如此。
那么,这六个约束点是怎么限制这六个自由度的呢?比如说,在一个平面上放置一个物体,这个平面就限制了物体沿 Z轴方向的移动以及绕 X 轴和 Y 轴的转动,这一下就限制了三个自由度。
再在这个平面上设置一个固定的圆柱销,这个圆柱销与物体上的一个孔配合。
这时候,物体沿 X 轴和 Y 轴方向的移动就被限制住了,这样又限制了两个自由度。
最后,在平面上再设置一个削边销,与物体上的另一个孔配合。
这就限制了物体绕 Z 轴的转动自由度。
这样,通过这三个平面、一个圆柱销和一个削边销,就完全限制了物体的六个自由度,使其在空间中的位置被完全确定。
六点定位原理在实际的机械加工和装配中有着广泛的应用。
在加工零件时,为了保证加工精度,必须将工件准确地定位。
比如在铣削一个平面,如果工件没有被正确定位,那么铣出来的平面可能就会不平整,尺寸也不准确。
在装配过程中,六点定位原理同样重要。
各个零部件只有在被准确定位的情况下,才能顺利地组装在一起,形成一个完整的产品。
然而,在实际应用中,六点定位原理也不是绝对僵化的。
六点定位原理的概念六点定位原理是一种用于确定物体在三维空间中位置和姿态的方法。
它基于物体上至少六个不同位置的标记点,通过测量这些标记点在相机或传感器视野中的二维坐标,并结合相机或传感器的内外参数,可以计算出物体在三维空间中的位置和姿态。
六点定位原理的基本概念是通过标记点在不同位置的二维坐标来进行三维定位。
这些标记点可以是特殊的标记物、传感器或者其他设备,它们在物体表面或周围被放置,用于被相机或传感器检测和测量。
这些标记点的位置需要在事先进行标定或者测量,以便在后续的定位过程中使用。
在进行六点定位时,需要获取至少六个标记点在相机或传感器视野中的二维坐标。
通过相机或传感器的内外参数,可以将这些二维坐标转换为三维空间中的坐标。
内参数包括相机或传感器的焦距、畸变参数等,外参数包括相机或传感器的位置、姿态等。
这些参数可以通过标定或者测量来获取。
一旦获得了标记点在三维空间中的坐标,就可以计算物体在三维空间中的位置和姿态。
通常使用的方法是通过最小二乘法或其他优化算法,将标记点的三维坐标与相机或传感器测量得到的二维坐标进行匹配,从而得到最优的物体位置和姿态。
六点定位原理在计算机视觉、机器人导航、增强现实等领域有广泛的应用。
它可以用于物体跟踪、姿态估计、三维重建等任务。
通过使用多个标记点,六点定位原理可以提高定位的准确性和稳定性,同时也可以应对物体遮挡、视角变化等问题。
总之,六点定位原理是一种基于标记点在不同位置的二维坐标进行三维定位的方法。
它通过相机或传感器的内外参数,将标记点的二维坐标转换为三维空间中的坐标,并计算出物体在三维空间中的位置和姿态。
这种方法在多个领域都有广泛的应用。
六点定位法则的正确理解与应用六点定位法则是指导夹具设计的基本原则,已沿用了几十年,但法则本身并不完善,对法则的理解和应用也存在许多混乱之处,因此有必要对六点定位法则进行再探讨。
1.传统六点定位法则的含义工件定位的实质就是使工件在夹具中占据确定的位置,因此工件的定位问题可转化为在空间直角坐标系中决定刚体坐标位置的问题来讨论。
在空间直角坐标系中,刚体具有六个自由度,即沿X、Y、Z轴移动的三个自由度和绕此三轴旋转的三个自由度。
用六个合理分布的支承点限制工件的六个自由度,使工件在夹具中占据正确的位置,称为六点定位法则。
人们在阐述六点定位法则时常以图1所示铣不通槽的例子来加以说明:a1、a2、a3三个点体现主定位面A,限制X、Y方向的旋转自由度和Z方向的移动自由度;a4、a5两个点体现侧面B,限制X方向的移动自由度和Z方向的旋转自由度;a6点体现止推面C,限制Y方向的移动自由度。
这样,工件的六个自由度全部被限制,称为完全定位。
当然,定位只是保证工件在夹具中的位置确定,并不能保证在加工中工件不移动,故还需夹紧。
定位和夹紧是两个不同的概念。
图12.传统六点定位法则存在的问题(1)a1~a6在有的专著中称为六个定位点,在有的文献中则称为六个支承点,事实上这是两个不同的概念。
支承点应是安装在夹具上直接与工件接触的具体定位元件,如支承钉、支承板、V形块等,在加工过程中它们还要参与平衡切削力、重力、夹紧力等;而定位点应是一个抽象概念,是指定位方式对自由度的限制。
限制一个自由度称为一个定位点,与支承点的多少无关。
例如,工件直接以平面定位时,应限制三个自由度,只应有三个定位点,而事实上此时的支承点远不止三个。
而且在一些特殊情况下,工件定位时根本就无具体的支承点,如常见的在车床上用四爪卡盘夹紧工件,用千分表找正,此时并没有具体的支承点参与定位,工件位置的确定是由千分表来完成的,这种定位方式在无支承点的情况下同样可以实现定位。
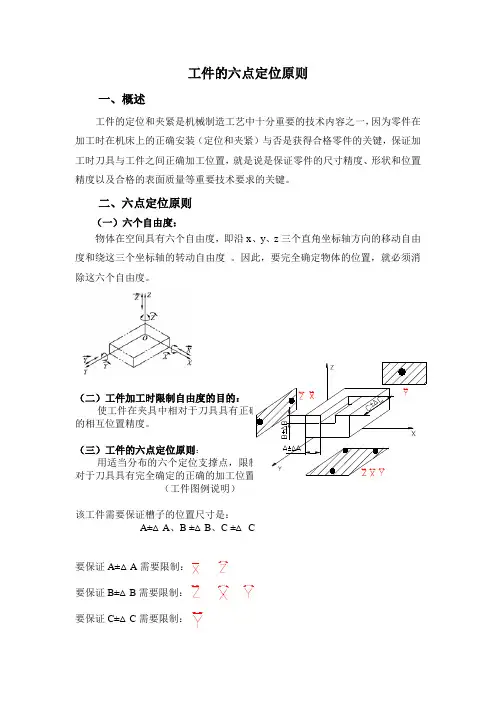
工件的六点定位原则
一、概述
工件的定位和夹紧是机械制造工艺中十分重要的技术内容之一,因为零件在加工时在机床上的正确安装(定位和夹紧)与否是获得合格零件的关键,保证加工时刀具与工件之间正确加工位置,就是说是保证零件的尺寸精度、形状和位置精度以及合格的表面质量等重要技术要求的关键。
二、六点定位原则
(一)六个自由度:
物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。
因此,要完全确定物体的位置,就必须消除这六个自由度。
(二)工件加工时限制自由度的目的:
的相互位置精度。
(三)工件的六点定位原则:
(工件图例说明)
该工件需要保证槽子的位置尺寸是:
A±△A、B ±△B、C ±△ C
要保证A±△A
要保证B±△B
要保证C±△C
(四)定位支承点的合理分布:
如果定位支承点如图分布,将有以下自由没法限制,即为:
使工件产生绕Y轴和Z轴
的旋转而无法保证A±△A、B ±△B的加工精度
定位支承点像这样在同一条直线上,是绝对不允许的,属不合理分布。
二、六点定位原则的应用
(一)分析模型的建立
1、建立三位坐标系
2、设立分析平面
一个大平面(三点):限制一个移动和两个转动
一个狭长平面(两点):限制一个移动和一个转动
一个小平面(一点):限制一个移动(如图)
(二)投影
(1)对工件与夹具定位元件的接触面按其特点分别往三个坐标平面上投影。
(2
(3
(三)定位分析
1、套类工件在芯轴上的定位:
投影结果:
1)XOY面限制了
2)YOZ面限制了
(2)圆柱形工件在V型贴上定位:
1)圆柱在两个短V型铁上定位限制了:
2)思考:
A)圆柱体在长、短V型铁上定位。
B)圆柱体在车床上两顶尖安装时的定位。