轨道式龙门起重机大车自动锚定研究
- 格式:pptx
- 大小:4.44 MB
- 文档页数:25
港口起重机械对制动装置和防风装置的要求摘要:随着我国步入社会主义现代化进程,人民对日常生产生活的要求也在不断提升,同时,我国对于港口项目的开发与发展也越来越重视,港口贸易以及效率直接带动了一个国家的经济发展速度。
港口起重机的安全可靠工作,影响港口生产的稳定增长。
本文就讲述了港口中起重机的特点,简单的提出了港口中起重机对制动装置的要求,港口在不同情况下的应当采用不一样的防风装置。
关键词:港口起重机械;制动装置;防风铁楔;夹轮器;夹轨器;要求在我国近几年中,随着我国的国民经济水平的飞速提升,在这几年中进出口贸易也是越来越多,我国的港口贸易的不断增加,导致了港口中的起重机械装置工作也是越来越频繁,就比如说某地区的港口集装箱码头中的起重机械工作时间已经达到了将近每小时四十个集装箱,在这里时间就是金钱被表现的淋漓尽致,港口中的起重机工作效率确定了三家的利益关系,分别为码头、货主与船东,所以当前必须要加强个港口中起重机的工作效率。
从以上可以看出港口中的起重机在装卸船中,起到了极其重要的作用,就算是人休息了,机械也不休息,一天24小时不间断休息,少的可能两三天,多的可能长达十几天,这种情况下的港口起重机的特点就是高速的满载,制动器能够精准无故障运行就非常重要。
一.制动装置和防风装置的作用(一)制动装置制动装置作为起重设备的重要的构建,核心功能就是提升机械稳定性,降低故障发生概率,预防物品或吊臂掉落,减少转轮或工具在风力作用下滚动;又或者将机构的运行速度逐渐降低最终停止运行。
或者承包商应确保重物始终悬浮在空气中。
所以,为了能够帮助起重机械能够更有效的工作,必须找寻契合设计要求的工具。
(二)防风装置防风装置的功能是在控制全部大轮的前提下进行防风。
当风动压力少于265N/m2时,制动轮,当风动压力多余265N/m2时,制动所有大轮,可使门机停止。
二.港口起重机对工业生产的实际帮助与需要(一)使用频率的提高带来质量要求的提升必须要提高作业效率才能够适应当前港口起重机械的需求,所以就不能够利用电力液压推动器,这种推动器操作频率较低,安全系数较低,并且结构容易腐蚀,对环境的要求较高,不适用于海洋气候,在这种情况下可以利用操作频率较高的电力液压制动器,就像是江西华伍制动器股份公司所创造的YP型电力液压制动器,在2006年这个公司自主创新的工业制动器进行生产,在当今世界还是处于比较先进的水准,此公司生产出的机械操作频率可以高达2500次/小时,而且寿命长,能做到高效的防腐,并且有比较完善的附加功能。
.C 山"""%”如丿 /2020年第11期 总第354期17裝备技术江苏鼎盛重工有限公司 冯涛上海海事大学蔡春波江苏鼎盛重工有限公司 何水辉,沈利,杨玉梅轨道式集装箱龙门起重机(以下简称“轨道吊”) 是集装箱码头堆场的主要装卸设备,其自动化程度、作业效率是制约码头发展的关键因素。
作为自动化 集装箱码头基础技术之一,轨道吊远程操控技术的 发展一直备受关注,设备制造商和港口企业对轨道 吊远程操控系统的研发从未停止。
近年来,随着自 动化集装箱码头技术的发展,传统集装箱码头管理者为了进一步提高码头整体作业效率和优化业务 流程,对轨道吊等设备实施智能远程操控改造;与此同时,物联网、传感器检测、无线通信、远程控制 等技术的成熟为研发先进的轨道吊等设备远程操 控系统提供技术支撑。
本文在传统轨道吊远程操控技术的基础上,从定位系统、通信系统、安全防护系统、视频系统等方面优化设计轨道吊智能远程操控 系统,以期提升轨道吊作业效率、安全性和自动化程度。
1轨道吊智能远程操控系统构成轨道吊智能远程操控系统主要包括远程操作 系统、视频系统、通信系统、自动纠偏系统和定位系统等五大子系统,具体作业实现过程如下:首先,在传统轨道吊的基础上,通过安装视频监控设备、激光扫描仪、服务器和传感器等辅助装置,实现轨道 吊自动化或半自动化运行;然后,通过人员在远程操作台的操作,完成轨道吊作业过程。
为了满足集装箱码头自动化作业要求,轨道吊智能远程操控系统必须具备高精度自动定位、低延时实时视频图像传输、高效可靠通信等功能。
为此,在传统轨道吊远 程操控技术的基础上,从设备通信、定位、安全防护等方面优化轨道吊远程操控系统,通过采用光纤通信、格雷母线大车定位、智能视频避障以及吊具智 能防摇等技术,进一步提升轨道吊远程操控系统的作者简介:冯涛(1971—),男,工程师,从事起重运输工程机械管理工作;蔡春淑1974—),女,高级工程师,从事起重设备智能制造及运维研究工作;何水挥(1984—),男,工程师,从事起重运输工程机械设计工作3必妙S龙必18Vol.31No.11General Serial No.351E Q U IP M E N T pp T E C H N O L O G Y 自动化和智能化水平。
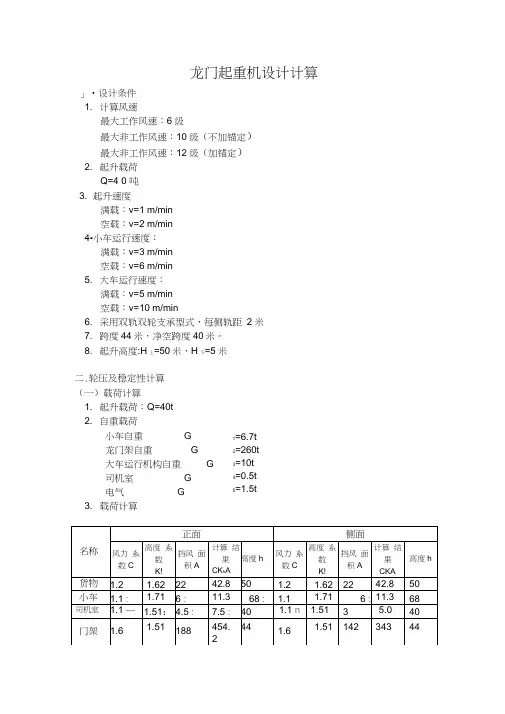
龙门起重机设计计算」•设计条件 1. 计算风速最大工作风速:6级最大非工作风速:10级(不加锚定) 最大非工作风速:12级(加锚定) 2. 起升载荷Q=4 0 吨 3. 起升速度满载:v=1 m/min 空载:v=2 m/min 4•小车运行速度:满载:v=3 m/min 空载:v=6 m/min 5. 大车运行速度:满载:v=5 m/min 空载:v=10 m/min6. 采用双轨双轮支承型式,每侧轨距 2米7. 跨度44米,净空跨度40米。
8. 起升高度:H 上=50米,H 下=5米 二.轮压及稳定性计算 (一)载荷计算1. 起升载荷:Q=40t2. 自重载荷小车自重 G 龙门架自重 G 大车运行机构自重 G 司机室 G 电气 G 3. 载荷计算1=6.7t2=260t 3=10t 4=0.5t 5=1.5t工作风压:q i =114 N/m2q n=190 N/m 2q m=800 N/m 2(10 级)q m=1000 N/m 2(12 级)正面:Fw i=518x114N=5.91 104NFw U=518x190N=9.86 104NFw m=518x800N=41.44 104N (10级)Fw m=518x1000N=51.8 104N (12级)侧面:Fw i =4.61 104NFw n=7.68 104NFw m=32.34 104N (10 级)Fw rn =40.43 104N (12 级)二)轮压计算1. 小车位于最外端,U类风垂直于龙门吊正面吹大车,运行机构起制动,并考虑惯性力的方向与风载方向相同。
龙门吊自重:G=G1+ G2+G3+G4+G5=6.7+260+10+2=278.7t 起升载荷:Q=40t水平风载荷:Fw U=9.86t 水平风载荷对轨道面的力矩:Mw U=9.86 X44.8=441.7 tm 水平惯性力:F a=(G+Q) X a=(278.7+40) X 0.2 X 1000 = 6.37 X 10000 N =6.37 t小车对中心线的力矩:M2=(6.7+40)X 16=747.2tm最大腿压:P=0.25 max=0.25 (G+Q) + M 1/2L + M q/2K318.7 + 722.0/48 + 747.2/84水平惯性力对轨道面的力矩:总的水平力力矩:M M a = 6.37 X 44=280.3tm 1 = M a+ Mw U=722 tm=79.675+15.04+8.9 =103.6t最大工作轮压:Rn a= P max/4 =25.9t =26t(三)稳定性计算工况1:无风、静载,由于起升载荷在倾覆边内侧,故满足刀M B 0 工况2:有风、动载,刀M=0.95 (278.7+40)12-628.3=3004.9 >0工况3:突然卸载或吊具脱落,按规范不需验算工况4: 10级风袭击下的非工作状态:刀M=0.95 278.7 12 - 1.15 41.44 44=3177.2-2668.7=1080.3>0飓风袭击下:刀M=0.95 278.8 12 - 1.15 51.8 44.8=508.5>0为防止龙门吊倾覆或移动,龙门吊设置风缆。
基于控制系统的龙门式起重机动力学建模与仿真分析龙门式起重机是一种常见的重型起重设备,广泛应用于港口、建筑工地、仓库等场所。
为了提高龙门式起重机的控制效果和运行稳定性,需要进行动力学建模与仿真分析。
本文将基于控制系统,详细介绍龙门式起重机的动力学建模方法,并进行仿真分析。
一、动力学建模方法1. 系统分析首先,需要对龙门式起重机的结构进行分析。
通常,龙门式起重机由大梁、小车、起重机和配重等组成。
其中,大梁支撑整个起重机,小车在大梁上移动,起重机则在小车上升降,实现货物的吊运。
在进行动力学建模时,需要考虑以上各个部分的质量、惯性、阻尼等因素。
2. 状态变量选择根据龙门式起重机的特点,选择适当的状态变量进行建模。
常用的状态变量包括主摆角、小车位置、起升高度等。
这些状态变量能够准确地描述起重机的运动轨迹和状态变化,有助于控制系统的设计与优化。
3. 运动方程建立根据运动学和动力学原理,推导龙门式起重机的运动方程。
对于多关节、多自由度的系统,可以利用拉格朗日方程、牛顿第二定律等基本原理进行建模。
根据实际情况,加入摩擦、阻尼等因素,使模型更加准确。
4. 参数辨识在建立动力学模型之前,需要进行参数辨识。
参数辨识的目的是确定龙门式起重机各个部分的质量、惯性、摩擦等物理参数。
可以通过实验或者仿真数据拟合的方法,对参数进行辨识。
辨识后的参数能够有效提高模型的准确性和仿真结果的可靠性。
二、仿真分析1. 控制策略设计在进行仿真之前,需要设计合适的控制策略。
控制策略是指通过调节龙门式起重机的控制动作,以达到预期的目标。
常用的控制策略包括PID控制、模糊控制、神经网络控制等。
根据不同的应用场景和需求,选择合适的控制策略进行仿真分析。
2. 仿真环境搭建基于控制系统的龙门式起重机动力学仿真通常采用计算机仿真软件进行。
如MATLAB/Simulink、ADAMS等。
通过搭建适当的仿真环境,可以模拟龙门式起重机在不同工况下的运动轨迹和力学特性,为后续的分析提供准确的仿真数据。
毕业设计(论文)开题报告题目集装箱龙门起重机设计电气控制部分专业班级学生指导教师X x大学年一、选题目的的理论价值和现实意义该题目涉及机电一体化,满足教学要求。
题目来源于生产,综合性、实践性强,通过集装箱龙门起重机设计(电气控制部分)可以培养学生正确的设计思想、方法、创新能力及科学态度,还可以提高学生的综合专业技能及素质。
二、本课题在国内外的研究状况及发展趋势轨道式龙门起重机采用电力驱动,由于其承载能力大、结构简单、营运费用低,在国内外得到广泛的使用。
通用型龙门起重机主要用于铁路、码头,大型工厂货场进行件杂货的装卸作业。
自1955年,集装箱运输方式出现后,由于采用集装箱运输可以节省包装费用,保持货物完整,且便于使用机械装卸搬运,减轻工人装卸作业劳动强度,提高装卸效率,加速运输船舶和车辆周转,降低运输费用,从而使集装箱运输得到迅速发展。
这种物流模式的变化又对装卸工艺、装卸机械提出了新的要求。
为了适应这种持续发展的要求,各大港口、起重机制造厂纷纷推出新的工艺方案和码头前沿作业机械和货场作业机械。
如JMQ3543、JMQ0733、JMQ4025集装箱龙门起重机采用现代化设计方法、并充分考虑了设备的可维修性和操作的舒适性及频繁的掏箱、对箱作业工况。
由于集装箱运输的发展,它的装卸必须用到起重机,因此轨道式龙门起重机的发展前景广阔,必将得到广泛的应用。
三、研究重点设计研究的主要内容包括:设计的起重机为重庆寸滩港的轨道式集装箱门式起重机,该起重机采用双主梁,跨距40.5t-40m,两端有效悬臂10m,可进行20'到40'国际标准集装箱的装卸、转运及堆放等作业。
进行集装箱门式起重机电气控制部分的设计和起重机的机器房结构设计。
电气控制部分采用三菱公司可编程控制器(PLC)控制,需画出电气原理图和电气布置图,并编写PLC梯形图程序,说明工作原理。
主要设计选择电动机、变频器和PLC程序设计;设计起重机的机器房结构,并使用Pro/ENGINEER或SolidWorks构建实体模型。
桥(门)式起重机定期检验自检报告
使用单位:
起重机类别:
起重机型号:
设备编号:
设备使用地址:
维保单位:
检验日期:
XX市XXXXXXXX有限公司编制
NO:
共 6 页第 1 页
说明
1. 本自检报告根据国家质量监督检验检疫总局制定的《起重机械定期检验规则》编制;
2. 本自检报告适用于下列起重机定期检验:通用桥式起重机、电站桥式起重机、绝缘桥式起重机、冶金桥式起重机、架桥机、电动单梁起重机、电动单梁悬挂起重机、电动葫芦桥式起重机、通用门式起重机、水电站门式起重机、轨
道式集装箱门式起重机、万能杠杆拼装式龙门起重机、岸边集装箱起重机、造船门式起重机、电动葫芦门式起重机、装卸桥、轮胎式集装箱门式起重机;
3. 本自检报告不适用防爆起重机械定期检验;本自检报告应有自检人员签名;
4. 检验结果、检验结论栏按照国家质量监督检验检疫总局印发的《起重机械定
期检验规则》规定的要求填写;“√”表示合格,“×”表示不合格,“/”
表示无此项;
桥(门)式起重机定期检验自检报告附页
NO:
共 6 页第 2 页
NO:
共 6 页第 3 页
NO:
共 6 页第 4 页
NO:
共 6 页第 5 页
NO:
6 页第 6 页
共
表B-1 绳卡数。
一、设备描述450t龙门吊安装在P.E场,主要用于分段的合拢,翻转,转运等工作。
跨度为165米,提升高度为84.5米(+70,-14.5米)也即地面以上70米,地面以下14.5米,行走距离为813米。
小车由上下两个小车组成。
上小车上有两个150吨主钩,分别叫1#、2#钩,下小车有一个150吨主钩,叫3#钩。
上小车两个主钩之间的间距可在10.5-15.5米之间调整。
上小车两个主钩之间的最大允许偏载为90吨。
3个钩可单独动作,也可各种组合的联动。
每个吊钩下面悬挂一个载重为150吨的平衡吊梁,自重为13.1吨二、450吨龙门吊锚固的目的防止遇见大风天气时,龙门吊被大风形成的风力移动造成和其他物体碰撞或脱离轨道的重大安全事故。
锚固方式一般分为两种:(1)6级及6级以下的锚固方式,简称作业结束锚固(2)7级及7级以上的锚固方式,简称大风锚固三、锚固方法1.作用结束锚固每天作业结束后,要把吊钩或平衡吊梁和吊装物脱开。
如果是平衡吊梁,把吊梁下部的吊钩捆扎到一起。
并把吊钩上升到上限位附近高度,对于平衡吊梁,上升到大梁底部以平衡吊梁围绕吊钩旋转时不和包括大梁在内的龙门吊本身及其他吊钩下的平衡吊梁,周边的固定物不发生干涉为原则。
特别要注意的是,如果周边有塔吊,龙门吊停止位置要避开塔吊的回转半径之外,以避免因刮风导致塔吊臂旋转时和龙门吊以及附属物发生碰撞。
龙门吊锚固的工作主要有龙门吊司机和信号手来做。
需锚固机构有大车行走机构,上小车行走机构,下小车行走机构1)大车行走机构(1)制动器:共有16个。
大车行走机构的刚性腿和柔性腿侧各有车轮,每侧各有8台驱动电机并各带8台制动器。
制动器即可通过机械方式打开闭合也可通过电控方式打开闭合,一般情况下使用电控方式,大车行走前自动打开,大车停止自动闭合。
制动器打开闭合均有限位开关来进行监控。
(2)夹轨器:共有3个。
刚性腿侧2个,柔性腿侧2个。
电动控制,一般大车停止时自动夹紧,大车移动时自动松开。