机器人本体机械结构
- 格式:ppt
- 大小:2.87 MB
- 文档页数:46
机器人本体基本结构形式
了解机器人的机械结构形式,从而我们可以根据机器人的操作目标和操作要求灵活地选用合适的机械结构形式。
机构设计需要考虑以下内容:确定机器人各部分(机身、臂部、腕部、手部、行走机构等)的机构运动形式和参数指标(运动范围、自由度等)、建立机器人坐标系和关节坐标系、传动机构设计和驱动元件初步选型等。
一、机器人本体基本结构
机器人本体基本结构包括:传动部件、机身及行走机构、臂部、腕部和手部。
机器人本体基本结构的主要有以下特点:
1、开式运动链:结构刚度不高:
2、相对机架:独立驱动器,运动灵活;
3、扭矩变化非常复杂:对刚度、间隙和运动精度都有较高的要求;
4、动力学参数(力、刚度、动态性能)都是随位姿的变化而变化:易发生振动或出现其他不稳定现象。
二、机器人本体基本结构要求:
1、自重小:改善机器人操作的动态性能;
2、静动态刚度高:提高定位精度和跟踪精度;增加机械系统设计的灵活性;减小定位时的超调量稳定时间,降低对控制系统的要求和系统造价;
3、固有频率高:避开机器人的工作频率,有利于系统的稳定。
三、机器人本体机身典型结构
机身结构一般由机器人总体设计确定。
1、回转与升降机身
a、油缸驱动,升降油缸在下,回转油缸在上。
升降活塞杆的尺寸要加大。
b、油缸驱动,回转油缸在下,升降油缸在上,回转油缸的驱动力矩要设计得大一些。
c、链轮传动机构,回转角度可大于360°
2、回转与仰俯机身。
四、机器人本体机身设计要注意的问题
1、刚度和强度大,稳定性能好;
2、驱动灵活,导套不宜过短,避免卡死;
3、驱动方式适宜;
4、结构布置合理。
全套设计通过答辩优秀CAD图纸QQ 36396305XX学院毕业设计说明书(论文)作者: 学号:学院(系):专业:题目: 重载搬运机器人本体结构设计【六自由度机械手】2015 年5月全套设计通过答辩优秀CAD图纸QQ 36396305毕业设计说明书(论文)中文摘要机械手是一种典型的机电一体化产品,搬运机械手是机械手研究领域的热点。
研究搬运机械手需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在搬运机械手的结构进行设计,并完成总装配图和零件图的绘制。
要求对机械手模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。
其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词:结构设计,机器臂,关节型机械手,结构分析毕业设计说明书(论文)外文摘要目录1 绪论 (1)1.1 引言 (2)1.2 搬运机械手研究概况 (3)1.2.1 国外研究现状 (3)1.2.2 国内研究现状 (4)1.4 搬运机械手的总体结构 (5)1.5 主要内容 (5)2 总体方案设计 (6)2.1 机械手工程概述 (6)2.2 工业机械手总体设计方案论述 (7)2.3 机械手机械传动原理 (8)2.4 机械手总体方案设计 (8)2.5 本章小结 (10)3 机械手大臂结构设计 (1)3.1 大臂部结构设计的基本要求 (1)3.2 大臂部结构设计 (2)3.3 大臂电机及减速器选型 (2)3.4 减速器参数的计算 (3)3.5承载能力的计算 (7)3.5.1 柔轮齿面的接触强度的计算 (7)3.5.2 柔轮疲劳强度的计算 (7)3.6 轴的计算校核 (8)3.7 大臂的平衡设计 (11)3.7.1 弹簧的受力分析 (11)3.7.2 弹簧的设计计算 (14)4机械手小臂结构设计 (18)4.1 腕部设计 (18)4.2 小臂部结构设计 (31)4.3 小臂电机及减速器选型 (31)4.3.1.传动结构形式的选择 (32)4.3.2.几何参数的计算 (32)4.4 凸轮波发生器及其薄壁轴承的计算 (33)4.4.1柔轮齿面的接触强度的计算 (34)4.4.2柔轮疲劳强度的计算 (35)4.5 轴结构尺寸设计 (36)4.6 轴的受力分析及计算 (36)4.7 轴承的寿命校核 (37)5机械手机身结构设计.......................................................................... 错误!未定义书签。

人形机器人的机械结构和控制系统近年来,随着科技的不断发展,人形机器人逐渐进入人们的视野,成为了一个备受关注的领域。
作为一种具有高度仿真的人工智能系统,人形机器人不仅可以模拟人类的各种动作,还可以实现一定程度的智能交互。
其中,机械结构和控制系统两大核心技术是其实现的关键。
一、机械结构机械结构是人形机器人的基础,决定了其外形和动作能力。
目前,人形机器人主要采用的是仿生学的设计理念,即将人类的肢体结构和生理特征与机器相结合,以实现高度的仿真效果。
首先,人形机器人的关节结构是其构造上的核心。
一般来说,关节采用的是类似于人类关节的球形结构,以使机器人能够实现多向运动和转动。
在模拟人类进食动作的时候,机器人需要具备人类手臂的柔软性和灵活性,因此,在关节上通常使用类似于人类骨骼的可伸缩结构,同时结合弹性元件,以实现更加逼真的动作。
其次,人形机器人的动作控制也是机械结构的重要组成部分。
机器人通常采用电机或者液压系统,通过闭环控制的方式来实现动作。
闭环控制是指通过传感器实时反馈机器人实际状态,再根据预设动作控制模型进行调整,以达到精准的动作控制效果。
基于闭环控制的动作控制系统,可以使机器人具备高精度、高稳定性的动作控制,也可以在不同情境下实现不同的交互方式。
最后,人形机器人的外部表面和外形设计也是其机械结构中的重要部分。
机器人的外形和材料应尽可能保持与人类肌肉组织、皮肤结构的相似性,以增强其仿真效果。
在表面材料的选择上,通常采用弹性材料,以增强机体柔韧性和吸收外界冲击的能力。
二、控制系统控制系统是人形机器人整体的大脑和中枢,主要负责机器人的决策、运动控制和交互反馈。
人形机器人的控制系统通常可以分为三个层次:低层次的运动控制、中层次的决策控制和高层次的认知控制。
首先,低层次的运动控制主要负责机器人的肌肉控制和运动反馈。
常见的低层次运动控制包括PID控制、动态系统模型控制等,这些方法在动作控制的实现上具有较高的精度和稳定性。
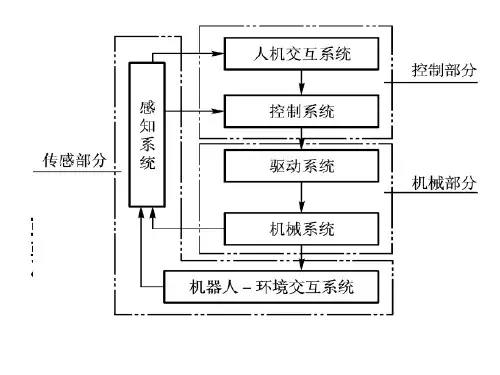
机器人本体组成机器人本体就是机器人的机械部分,又叫操作机,是工业机器人的操作机构,是指工业机器人的原样和自身。
整体机器人还有其它的配套软件和配套设备组成。
机器人本体基本结构由五部分组成:1、传动部件;2、机身及行走机构;3、臂部;4、腕部;5、手部。
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
机器人本体的结构特点有:1、工业机器人本体可以简化成各连接杆首尾相连、末端开放的一个开式运动链,机器人本体的结构刚度差,并随空间位置的变化而变化;2、机器人本体的每个连杆都具有独立的驱动器,连杆的运动各自独立,运动更为灵活;一般连杆机构有1-2个原动件,各连杆间的运动是相互约束的。
3、连杆驱动扭矩变化复杂,和执行件位置相关。
对机器人本体的基本要求:自重小:改善机器人操作的动态性能;静动态刚度高:提高定位精度和跟踪精度;增加机械系统设计的灵活性;减小定位时的超调量稳定时间,降低对控制系统的要求和系统造价;固有频率高:避开机器人的工作频率,有利于系统的稳定。
好的机器人本体门槛很高,除了电机、减速机的硬伤之外,好的结构设计也非常难,这就是为什么国内机器人本体做得好的、批量生产一致性很好的机器人厂商很少。
如果能在这个上面有所突破,那就非常有前途。
很多人都认为机器人本体无非是实际各个轴的相对连接,本体制造多样,一般是铸铝。
但是实际上好的机器人本体要复杂得多,会有很多细节的问题:比如说如果让重心降低,性能提升;电机与减速机的装配如何保证精度;本体的制造工艺如何保证一致性,装配如何实际稳定产量;如何解决电机散热问题;如何保证线缆长时间不损坏;如何保证机器人重复定位精度保持稳定;如何提高机器人动作的平滑,特别是低速运行时不会抖动。