A 1 B 2
FN1
D
FN2 F
D
3 C h
FN3
F
平衡方程为
( FN1 FN3 ) cos FN2 F cos 0 FN1 sin FN3 sin F sin 0
这是一次超静定问题
A 1 B 2
1 D
E
l3
D3
l2
( FN1 FN3 ) cos FN2 F cos 0 FN1 sin FN3 sin F sin 0 l1 l3 2 l2 cos
A 1 B 2
D
物理方程为
FN1l1 FN1h l1 EA EA cos FN2l2 FN2h l2 EA EA FN3l3 FN3h l3 EA EA cos
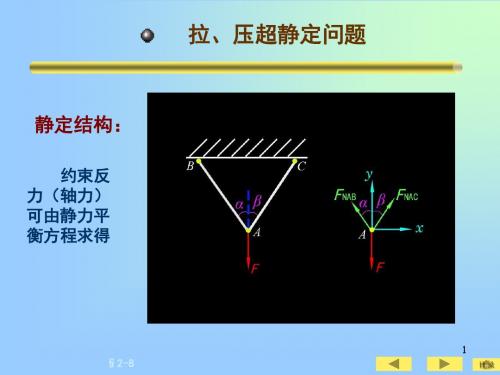
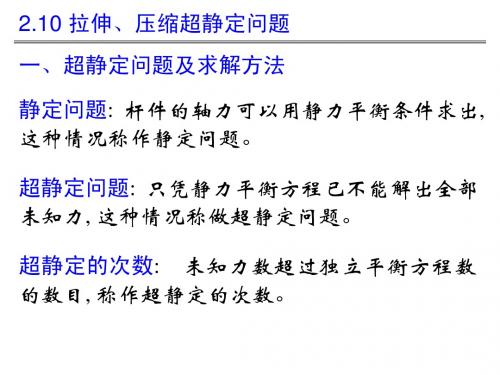
2.10 拉伸、压缩超静定问题 一、超静定问题及求解方法 静定问题: 杆件的轴力可以用静力平衡条件求出, 这种情况称作静定问题。 超静定问题: 只凭静力平衡方程已不能解出全部 未知力, 这种情况称做超静定问题。
超静定的次数: 未知力数超过独立平衡方程数 的数目, 称作超静定的次数。
2.10 拉伸、压缩超静定问题 变形协调方程: 在静不定问题中, 各部分变形之 间必存在相互制约的条件, 这种条件称为变形相 容条件(变形协调方程)。
2 FN1 3 FN2 6 F
这是一次超静定问题
(2) 画变形几何关系图 建立变形几何方程
变形协调条件为: 梁 ABCD 绕 铰 链 A 转 动 , ①、② 两杆仍与其铰接
d C 2d B
②
A a
60º B