ANSYS齿轮接触案例讲解
- 格式:ppt
- 大小:948.01 KB
- 文档页数:60
基于ANSYS的齿轮接触应力与啮合刚度研究共3篇基于ANSYS的齿轮接触应力与啮合刚度研究1齿轮作为一种常用的传动元件,在机械系统的运转中发挥着重要的作用。
因此,对于齿轮的力学性能研究具有重要的意义。
本文以ANSYS软件为工具,研究齿轮接触应力与啮合刚度的相关问题。
一、齿轮模型的建立齿轮模型的建立是研究齿轮力学性能的基础。
初步建模需要确定齿轮参数、材料参数等。
在本次研究中,我们选取了一个模数为4的齿轮进行建模,在材料参数选取方面,我们选择了常用的20CrMnTi材料,以其为基础进行实验。
建模之后需要进行网格划分,网格密度的选择会影响后续分析的准确性以及计算时间,因此需要选择合适的密度。
选取太粗的网格会导致结果失真,选取太细的网格则会消耗大量的计算时间。
本次研究选取了相对均匀的中等密度网格,以保证结果的准确性。
二、齿轮接触应力分析齿轮在啮合过程中会产生接触应力,这对于齿轮的寿命和工作效率都有着至关重要的作用。
因此,研究齿轮接触应力,选择适当的润滑方式,对齿轮寿命和传动效率都有着重要的意义。
在ANSYS中进行齿轮接触应力的分析和计算,需要考虑到许多复杂的因素,如齿形、材料参数、润滑方式等。
在本次研究中我们采用了基于有限元方法的接触分析(FEM),对齿轮接触应力进行评估。
得到接触应力的结果后,我们可以对齿轮的寿命进行评估,并针对接触应力过大的地方进行优化处理。
三、齿轮啮合刚度分析除了接触应力之外,齿轮的啮合刚度对于传动的效率和精度也有着重要的影响。
啮合刚度是指啮合中两齿之间相对于轴线方向的相对运动能力,也可以视为齿轮在啮合过程中的弹性变形程度。
齿轮的啮合刚度与齿轮副的堆叠误差、硬度、几何尺寸等的影响有关。
在本次研究中,我们采用了ANSYS的非线性有限元分析方法,对齿轮的啮合刚度进行建模和优化。
通过对啮合刚度的研究,我们可以指导齿轮的加工和优化,提高其传动效率和精度。
四、总结本次研究基于ANSYS对齿轮接触应力和啮合刚度进行了研究。
0引言差速器作为汽车动力传动系统的重要组成部分,在汽车于凹凸不平的路面上行驶或转弯时,能够限制左右(或前后)驱动轮以不同的速度旋转,确保驱动轮以纯滚动状态行驶。
差速器齿轮的优化设计对保证差速器强度和耐久度,保证车辆安全可靠行驶,提高整车驾驶性,减少能源消耗等具有重要意义。
差速器的齿轮传动性能的影响因素之一是齿形;目前广泛应用于差速器的齿廓曲线齿轮有渐开线齿轮、圆弧齿轮和Logix 齿轮。
日本学者小守勉首次提出了名为Logix 齿轮(Logix Gear )的新型齿轮。
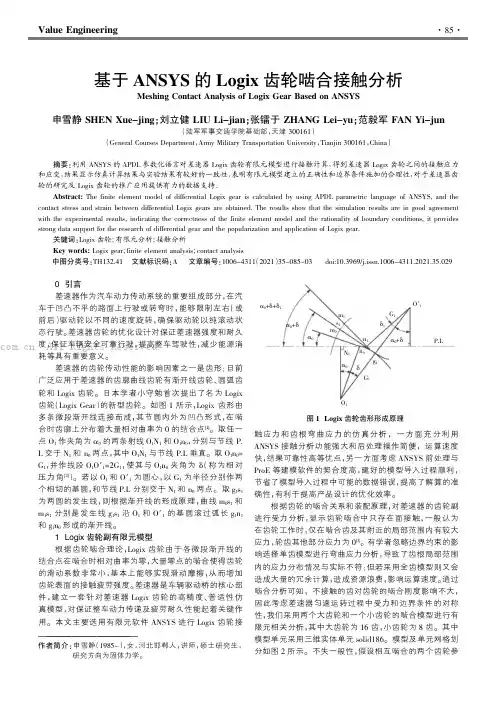
如图1所示,Logix 齿形由多条微段渐开线连接而成,其节圆内外为凹凸形式,在啮合时齿廓上分布着大量相对曲率为0的结合点[1]。
取任一点O 1作夹角为α0的两条射线O 1N 1和O 1n 0,分别与节线P.L 交于N 1和n 0两点,其中O 1N 1与节线P.L 垂直。
取O 1n 0=G 1,并作线段O 1O′1=2G 1,使其与O 1n 0夹角为δ(称为相对压力角[2])。
若以O 1和O′1为圆心,以G 1为半径分别作两个相切的基圆,和节线P.L 分别交于N 1和n 0两点。
取g 1s 1为两圆的发生线,则根据渐开线的形成原理,曲线m 0s 1和m 1s 1分别是发生线g 1s 1沿O 1和O′1的基圆滚过弧长g 1n 1和g 1n 0形成的渐开线。
1Logix 齿轮副有限元模型根据齿轮啮合理论,Logix 齿轮由于各微段渐开线的结合点在啮合时相对曲率为零,大量零点的啮合使得齿轮的滑动系数非常小,基本上能够实现滑动摩擦,从而增加齿轮表面的接触疲劳强度。
差速器是车辆驱动桥的核心部件,建立一套针对差速器Logix 齿轮的高精度、普适性仿真模型,对保证整车动力传递及疲劳耐久性能起着关键作用。
本文主要选用有限元软件ANSYS 进行Logix 齿轮接触应力和齿根弯曲应力的仿真分析,一方面充分利用ANSYS 接触分析功能强大和后处理操作简便,运算速度快,结果可靠性高等优点,另一方面考虑ANSYS 前处理与ProE 等建模软件的契合度高,建好的模型导入过程顺利,节省了模型导入过程中可能的数据错误,提高了解算的准确性,有利于提高产品设计的优化效率。
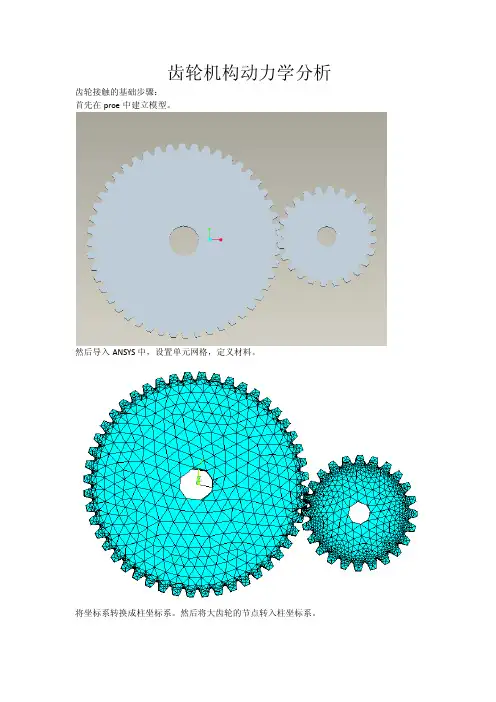
齿轮机构动力学分析齿轮接触的基础步骤:
首先在proe中建立模型。
然后导入ANSYS中,设置单元网格,定义材料。
将坐标系转换成柱坐标系。
然后将大齿轮的节点转入柱坐标系。
然后,在大齿轮上施加约束和位移。
Preprocessor-----solution----define load-----structural-----apply----displacement
单击apply之后,出现如下对话框。
之后施加约束。
方法跟上面一样。
之后建立局域坐标。
方法如下。
现在小齿轮的内圆心中建立一个点node。
之后,在此点处建立局域坐标。
选择柱坐标
之后将小齿轮节点导入当前坐标系,做法跟之前一样。
Preprocessor------modeling-----move/modify------rotate node to current cs
我就不介绍了哈~~~~~
之后,在小齿轮上施加位移和约束。
之后,建立接触。
建一个齿的就行啦~~~~(建多了很麻烦,当然,如果你有兴趣的话,全建上我也不反对)
方法如下:
之后,求解吧~~~solve
结果云图,我就不晒了,太累了!
注意:如果结果显示某个齿轮不转,例如小齿轮不转,那你就重新在定义一遍小齿轮的位移和约束,最好局域坐标系啥的也重新做一遍,ansys 这个软件有时候他就范毛病! 这个例子就是玩,简单玩一下,你也可以在此基础上,变某些东西,比如说不加位移,加转速或角加速度,有兴趣可以试一试,我试了,没转起来,不知道啥原因,呵呵! 本人水平有限,还望各路高人教两招有关这类分析的好方法!。
ANSYS齿轮接触应力分析案例齿轮是机械传动系统中常用的零部件,用于传递动力和转速。
在齿轮的工作过程中,由于受力情况复杂,容易发生接触应力过大导致齿轮损坏的情况。
为了确保齿轮的工作性能和寿命,需要进行接触应力的分析和优化设计。
ANSYS作为常用的有限元分析软件,可以用于进行齿轮接触应力的模拟和分析。
本文将以一个齿轮接触应力分析案例为例,介绍如何使用ANSYS软件进行接触应力的分析。
本案例以一对齿轮为例,通过对齿轮的建模、加载和分析过程,展示如何通过ANSYS软件进行齿轮接触应力的分析。
1.齿轮建模首先,在ANSYS软件中建立齿轮的几何模型。
可以通过CAD软件绘制齿轮的几何形状,然后导入到ANSYS中进行网格划分。
在建模过程中,需要考虑齿轮的齿形、齿数、模数等参数,并根据实际情况设置合适的几何形状。
2.设置加载在建模完成后,需要设置加载条件。
在本案例中,以齿轮传递动力时的载荷为例,可以通过施加力或扭矩来模拟齿轮的工作情况。
根据实际情况设置载荷大小和方向,以便进行接触应力的仿真分析。
3.网格划分接着对齿轮的几何模型进行网格划分,生成有限元网格。
在ANSYS中,可以通过自动网格划分功能或手动划分网格,确保模型的几何形状与加载条件得到合理的分析精度。
4.设置材料属性在进行齿轮接触应力分析前,需要设置材料的力学性质。
根据齿轮的实际材料属性,设置材料的弹性模量、泊松比等参数,以便进行接触应力的仿真分析。
5.运行分析设置完加载和材料属性后,可以进行齿轮接触应力的仿真分析。
在ANSYS中选择适当的分析模型和求解器,进行接触应力的计算和分布分析。
通过分析结果可以得到齿轮接触区域的应力分布情况,确定是否存在应力集中的问题。
6.结果分析最后,分析计算结果并进行结果的分析和优化。
根据接触应力的分布情况,确定齿轮的工作性能是否满足要求,是否存在应力过大导致损坏的风险。
如果需要,可以对齿轮的设计参数进行调整和优化,以提高齿轮的工作性能和寿命。

课程论文(2015-2016学年第二学期)基于ANSYS WORKBENCH 的空间曲线啮合齿轮接触分析基于ANSYS WORKBENCH 的空间曲线啮合齿轮接触分析摘要:空间曲线啮合齿轮是近几年来华南理工大学教授陈扬枝提出的新型齿轮,对该齿轮的弯曲应力和强度设计准则都有了一定的研究。
因此,本文主要是利用ANSYS WORKBENCH软件来对该齿轮来进行接触分析的进行探讨,介绍了接触分析的方法,为空间曲线啮合齿轮提供了一种新的分析方法。
用两个初始参数几乎完全一样的两个齿轮对来进行比较分析,得到交错轴齿轮比交叉轴齿轮的等效应力更大;安装位置对分析的结果的影响也很大;等效应变和变形都能够满足我们实际的需求等这些结论。
关键词:ANSYS WORKBENCH 空间曲线啮合齿轮接触分析1.引言传统的齿轮的形式多种多样,用有限元对传统齿轮的机构进行分析是目前研究采用得最多的一种方法。
而齿轮啮合过程作为一种接触行为,因涉及接触状态的改变而成为一个复杂的非线性问题。
因此近年来,国内外学者开始采用接触有限元法对齿轮进行分析。
接触有限元法来分析齿轮结构,为齿轮的快速设计和进一步的优化设计提供条件。
空间曲线啮合齿轮(Space Curve Meshing Wheel, SCMW) [1~3]是近几年来由华南理工大学教授陈扬枝提出的新型齿轮,而空间曲线啮合交错轴齿轮则是可以运用于空间交错轴上的啮合齿轮。
不同于基于齿面啮合理论的传统齿轮机构[4、5],它们是基于一对空间共轭曲线的点啮合理论。
它的特点是:传动比大、小尺寸、质量轻等。
课题组前期已经研究了适用于该空间曲线啮合轮机构的空间曲线啮合方程[6],重合度计算公式[7],强度设计准则[8]以及制造技术[9]等,并设计出微小减速器[10]。
同时,对于该齿轮的等强度设计等方面正在进行研究。
ANSYS WORKBENCH是用ANSYS 求解实际问题的产品,它是专门从事于模型分析的有限元软件,能很好地和现有的CAD三维软件无缝接口,来对模型进行静力学、动力学和非线性分析等功能。
ANSYS接触分析实例接触分析是指在模拟两个物体在接触过程中的力学行为。
在工程设计中,接触分析能够解决各种复杂的机械接触问题,例如轴承、齿轮传动、接头连接等。
ANSYS通过它的接触分析功能,能够模拟物体间的精确接触行为,包括接触压力、接触区域、接触力和摩擦力等,并提供准确的力学分析结果。
举一个实际的例子,假设我们需要分析一个摩擦力的问题。
一辆汽车正在上坡行驶,车轮与路面之间的接触处产生了摩擦力。
我们希望通过ANSYS来模拟并计算摩擦力的大小。
首先,我们需要建立一个三维模型,包括车轮和路面。
可以使用ANSYS提供的建模工具进行绘制,也可以导入其他CAD软件中的模型。
在建模过程中,我们需要设置适当的边界条件和材料属性,例如路面的摩擦系数和车轮的材料参数。
接下来,我们需要定义接触边界条件。
在这个例子中,车轮与路面之间发生接触的区域称为接触区域。
可以在ANSYS中使用接触探测器来自动识别接触区域,或者手动定义接触区域。
在定义接触区域后,需要设置接触界面的行为,包括摩擦系数、接触刚度和接触阻尼等。
这些参数将影响接触力和摩擦力的计算结果。
完成模型和边界条件的设置后,我们可以进行接触力的计算。
首先,需要进行非线性静力分析,通过施加一个外力或位移来激活接触区域。
ANSYS将自动求解力学平衡方程并计算出接触力。
我们可以通过结果后处理功能来可视化和分析接触力的分布情况。
得到接触力的结果后,我们可以根据需要进一步分析摩擦力。
ANSYS提供了丰富的后处理工具,例如力矩计算和摩擦力分析工具,可以帮助我们准确地计算和分析摩擦力的大小和方向。
通过以上的步骤,我们可以使用ANSYS进行接触分析,并得到准确的接触力和摩擦力结果。
这个例子只是接触分析的一个简单示例,实际应用中的接触分析可能涉及更复杂的几何形状、材料特性和接触行为等,并需要更深入的分析和验证。
但是通过ANSYS强大的功能和易用性,工程师们可以更高效地解决接触分析问题,提高产品设计的质量和性能。
基于ANSYS的齿轮仿真分析齿轮是一种常见的机械传动元件,广泛应用于工业生产中的各种机械设备中。
齿轮的工作性能直接影响着整个传动系统的性能和可靠性。
为了确保齿轮的正常工作和延长使用寿命,需要对齿轮进行仿真分析。
本文将介绍基于ANSYS软件的齿轮仿真分析方法和流程。
首先,进行齿轮的几何建模。
使用ANSYS软件中的几何建模工具,根据实际齿轮的参数进行几何建模。
包括齿轮的齿数、模数、齿宽等参数。
建立三维模型后,对齿轮进行网格划分,生成有限元模型。
接下来,进行材料属性的定义。
根据实际齿轮的材料,定义材料属性。
包括弹性模量、泊松比、材料密度等参数。
这些参数将被用于后续的载荷和刚度分析。
然后,进行齿轮的载荷分析。
齿轮在工作过程中受到来自外界的载荷作用,主要包括径向力、切向力和轴向力等。
通过ANSYS中的载荷工具,对齿轮进行载荷加载。
可以根据实际工况设置载荷大小和方向。
进行齿轮的接触分析。
齿轮的接触是齿轮传动中的重要性能指标之一、通过ANSYS中的接触分析工具,可以计算齿轮接触面上的应力分布、接触区域和接触压力等参数。
这些参数对于齿轮的寿命和工作性能有重要影响。
进行齿轮的动力学分析。
齿轮在传动过程中会产生振动和噪声。
通过ANSYS中的动力学分析工具,可以计算齿轮的振动模态、固有频率和振动幅度等参数。
这些参数对于齿轮的运行平稳性和噪声控制有重要意义。
最后,进行疲劳分析。
齿轮在长时间使用过程中,容易出现疲劳破坏。
通过ANSYS中的疲劳分析工具,可以预测齿轮的寿命和疲劳破坏位置。
通过疲劳分析结果,可以调整齿轮的设计参数,提高其工作寿命。
综上所述,基于ANSYS的齿轮仿真分析包括几何建模、材料属性定义、载荷分析、接触分析、动力学分析和疲劳分析等步骤。
通过这些分析,可以评估齿轮的工作性能,指导齿轮的设计和改进。
同时,齿轮仿真分析可以帮助优化整个传动系统的工作性能和可靠性,提高机械设备的制造水平和整体效益。
基于ANSYS的齿轮弯曲应力、接触应力以及模态分析随着汽车性能和速度的提高,对变速箱齿轮也提出了更高的要求。
为较好地改善齿轮传动性能,有必要对齿轮进行静力学以及动力学分析。
对于齿轮的静力学分析,本文利用ANSYS对齿轮进行了齿根弯曲应力分析以及齿轮接触应力分析。
对于齿轮的动力学分析,本文利用ANSYS对其进行了模态分析,提取了齿轮的前十阶固有频率和固有振型。
最后实验表明,基于ANSYS的齿轮弯曲应力和接触应力相比较传统方法具有一定的裕度,而模态分析能较形象地展现其振型。
标签:齿轮;弯曲应力;接触应力;模态分析引言随着汽车性能和速度的提高,对变速箱齿轮也提出了更高的要求。
改善齿轮传动性能成为齿轮设计中的重要内容。
为了避免由于齿轮接触疲劳而引发的行驶事故,有必要对齿轮的齿根弯曲应力和齿面接触应力进行分析和评估。
同理,为避免由于齿轮共振引起的轮体破坏,有必要对齿轮进行固有特性分析,通过调整齿轮的固有振动频率使其共振转速离开工作转速。
齿轮的工作寿命与最大弯曲应力值的六次方成反比,因此最大弯曲应力略微减小,齿轮工作寿命即会大大提高[1]。
齿轮的最大弯曲应力往往出现在齿轮的齿根过渡曲线处,因此精确计算渐开线齿轮齿根过渡曲线处的应力,进而合理设计过渡曲线,对延长齿轮工作寿命、提高齿轮承载能力至关重要。
为了进行齿面接触强度计算,分析齿面失效和润滑状态,必须分析齿面的接触应力。
经典的齿面接触应力计算公式是建立在弹性力学基础上,而对于齿轮的接触强度计算均以两平行圆柱体对压的赫兹公式为基础。
但由于齿轮副啮合齿面的几何形状十分复杂,采用上面的方法准确计算轮齿应力和载荷分配等问题非常困难甚至无法实现。
随着计算机的普及,齿轮接触问题的数值解法获得了越来越广泛的应用。
齿轮副在工作时,在内部和外部激励下将发生机械振动。
振动系统的固有特性,一般包括固有频率和主振型,它是系统的动态特性之一,同时也可以作为其它动力学分析的起点,对系统的动态响应、动载荷的产生与传递以及系统振动的形式等都具有重要的影响。
齿轮副的接触分析及模态分析程* 2018101171.齿轮的相关参数齿顶直径:24齿底直径:20齿数:10厚度:4密度:7.8E3弹性模量:2.06E11摩擦系数:0.1中心距:442.建立模型从主菜单中选择Preference命令,在对话框中选择“Structural”复选框定义单元类型主菜单中选择Preprocessor>Element Type>Add/Edit/Delete,设置“Solid”,“4node 182”在Element Types对话框中单击【Options】弹出单元选项对话框,对PLANE182单元进行设置定义实常数选择Preprocessor>Real Constants>Add/Edit/Delete,设置常数单元类型,中将厚度设置为4定义材料属性从主菜单中选择Preprocessor>Material Props>Material Models,设置材料的弹性模量EX=2.06E11、泊松比PRXY=0.3,材料密度为7.8E3,摩擦系数为0.1建立齿轮面模型将当前坐标系设置为总体柱坐标系。
从实用菜单中选择WorkPlane>Change Actives CS to>Global Cylindrical定义关键点:Preprocessor>Modeling>Create>Keypoints>In Active CS,编号1(20,0);定义辅助点:Preprocessor>Modeling>Create>Keypoints>In Active CS偏移工作平面到给定位置选择WorkPlane>Offset WP to>Keypoints +,选择110号辅助点旋转工作平面选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX,ZXAngles”文本框中输入-50,0,0将激活的坐标系设置为工作平面坐标系:选择WorkPlane>Change Actives CS to>Working Plane建立第二个关键点,Preprocessor>Modeling>Create>Keypoints>In Active CS ,2(12.838,0)设置总体柱坐标系,选择WorkPlane>Change Actives CSto>Global Cylindrical建立其余辅助点:Preprocessor>Modeling>Create>Keypoints>In Active CS,设置编号依次为120,130,140,150,160,其坐标依次为(16,43)、(16,46)、(16,49)、(16,52)、(16,55)a.偏移工作平面到给定位置选择WorkPlane>Offset WP to>Keypoints +,选择120号辅助点b.旋转工作平面,选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX,ZXAngles”文本框中输入3,0,0c. 将激活的坐标系设置为工作平面坐标系:选择WorkPlane>Change Actives CS to>Working Plane建立第三个关键点:Preprocessor>Modeling>Create>Keypoints>In Active CS,3(13.676,0)重复以上a—c,建立其余的辅助点和关键点,分别把工作平面平移到编号为130,140,150,160的辅助点,然后旋转工作平面,旋转角度均为3,0,0,再讲工作平面设为当前坐标系,在工作平面中分别建立编号为4,5,6,7的关键点,其坐标依次为(14.513,0)、(15.351,0)、(16.189,0)、(17.027,0)建立编号为8,9,10的关键点,选择WorkPlane>Change Actives CSto>Global Cylindrical、Preprocessor>Modeling>Create>Keypoints>In Active CS,建立关键点8(24,9.875)、9(24,13)、10(20,5)创建圆弧线选择Preprocessor>Modeling>Create>Lines>Straight Line,按顺序连接关键点,再将其相加使其成为一条线Preprocessor>Modeling>Operate>Booleans>Add>Lines,删除原来的线偏移工作平面到总坐标系的原点:WorkPlane>Offset WP to>Global Origin将工作平面与总体坐标系对齐:WorkPlane>Align WP with>Global Cartesian将工作平面旋转13°,选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX Angles”文本框中输入13,0,0将所有线沿着X-Z面进行镜像(在Y方向),选择Preprocessor>Modeling>Reflect>Lines把每个齿顶上的两条线粘起来,选择Preprocessor>Modeling>Operate>Booleans>Glue>Lines 把齿顶上的两条线加起来,成为一条线,Preprocessor>Modeling>Operate>Booleans>Add>Lines 在柱坐标系下复制线,设置坐标系选择WorkPlane>Change Actives CS to>Global Cylindrical,主菜单选择Preprocessor>Modeling>Copy>Lines把齿底上的所有线粘起来,Preprocessor>Modeling>Operate>Booleans>Glue>Lines,分别选择齿低的两条线,再把齿底上的所有线加起来把所有线粘起来,选择Preprocessor>Modeling>Operate>Booleans>Glue>Lines用当前定义的所有线生成一个面,选择Preprocessor>Modeling>Create>Areas>Arbitrary>By Lines创建圆面,选择Preprocessor>Modeling>Create>Areas>Circle>Solid Circle从齿轮面中减去圆面,选择Preprocessor>Modeling>Operate>Booleans>Subtract>Areas在直角坐标系下复制面,设置坐标系选择WorkPlane>Change Actives CS to>Global Cartesian,复制Preprocessor>Modeling>Copy>Areas创建局部坐标系,选择WorkPlane>Local Coordinate Systems>Create Local CS>At Specified Loc+将当前坐标系设置为局部坐标系,选择WorkPlane>Change Actives CS to>Specified Coord Sys在局部坐标系下复制面,选择Preprocessor>Modeling>Copy>Areas删除第二个面,选择Preprocessor>Modeling>Delete>Area and Below,生成结果划分网格对齿面划分网格,选择Preprocessor>Meshing>MeshTool定义接触对(1)从应用菜单中选择Select>Entities,在类型下拉列表中选“Lines”,点击【Apply】(2)打开先选择对话框,选择一个齿轮上可能与另一个齿轮相接触的线,点击【OK】(3)在实体选择对话框中选择“Nodes”,在选择方式中选择“Attached to ”,在单选列表中选择“Lines, all”(4)选择Select>Como/Assembly>Create Component,在“Component name”文本框中输入”node1”,点击【OK】(5)从实用菜单中选择Select>Everything(6)在实体选择对话框中在类型下拉列表中选“Lines”,选择方式选“By Num/Pick”,点击【Apply】,弹出线选择对话框,选择另一个齿轮上可能与前一个齿轮相接触的线,点击【OK】在实体选择对话框中选择“Nodes”,在选择方式中选择“Attached to ”,在单选列表中选择“Lines, all”(7)选择Select>Como/Assembly>Create Component,在“Component name”文本框中输入”node2”,点击【OK】(8)从实用菜单中选择Select>Everything(9)点击工具栏中的【接触定义向导】(10)选择工具条中的第一项,会打开下一步操作向导,在对话框中选择”NODE2”,并点击【Next】(12)在对话框选取“NODE1”,点击【NEXT】(13)点击【Create】,建立接触对3.定义边界条件并求解(1)施加位移边界,选择WorkPlane>Change Actives CS to>Global Cylindrical;选择Preprocessor>Modeling>Move/Modify>Rotate Node CS>To Active CS,打开节点选择的对话框,要求选择欲旋转的坐标系的节点;选择第一个齿轮内径上所有节点,从实用菜单中选择Select>Entities,弹出实体选择对话框,选择第一个齿轮内径上所有的节点选择Solution>Define Loads>Apply>Structural>Displacement>on Nodes,点开节点选择对话框,要求选择欲施加位移约束的节点。
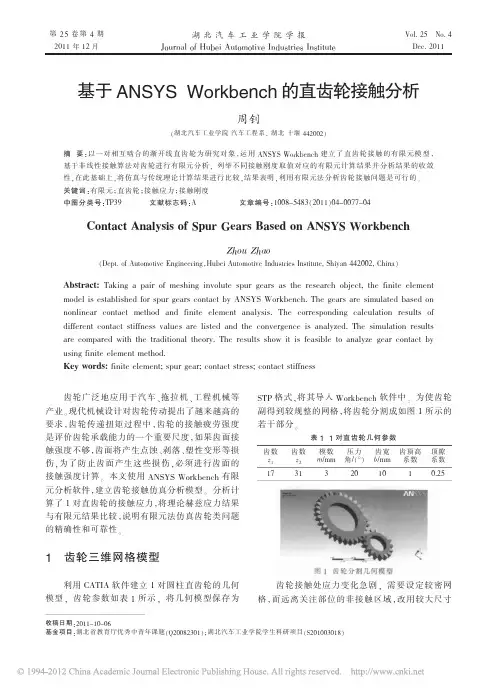
1072013年9月下 第18期 总第174期1 概述随着齿轮传动向重载、高速、低噪、高可靠性方向发展,现代齿轮设计对齿轮传动系统的静、动态特性提出了更高的要求。
齿轮设计的主要内容之一是强度设计,因此,建立比较精确的分析模型,准确的掌握齿轮应力的分布特点和变化规律具有重要的意义。
①③④设计模型的几何尺寸及边界条件如下表所示,大齿轮与小齿轮的齿厚为10mm,两个齿轮的中心距离为81mm。
小齿轮为主动齿轮,大齿轮为从动齿轮,小齿轮均匀转速0.2rad/s,大齿轮承受600N.m 的阻力扭矩,计算时间为1s.(如表1表2)2 模型的建立定义小齿轮渐开线,定义小齿轮根部过渡曲线,定义小齿轮齿廓线,建立小齿轮模型,同理建立大齿轮模型,调整两个齿轮的位置,如图1所示。
3 齿轮有限元网格模型的建立在Ansys中对齿轮副进行分析,首先要建立齿轮的有限元网格模型。
依据齿轮啮合模型参数,把根据齿面方程设计的专有程序计算结果导人Ansys,建立齿轮单齿有限元网格模型如图2所示。
针对所建齿轮模型,在齿高方向划分了17层单元,过渡部分划分4层单元,齿厚方向划分41层单元,为节省计算资源,省略了齿轮的辐板和轮载部分等对接触分析结果影响不大的部分。
该模型共有7896个节点,7678个单元,轮齿采用Solid45八节点线性等参元,将生成的单齿模型数据导人到Ansys中,并对其进行旋转复制等操作,把单齿模型拓展为有限元网格模型。
4 齿面接触情况及分析过程在上述模型上施加扭矩,对面齿轮副进行分析计算。
由于面齿轮的传动误差都很小,一般都在10-4-10-2范围内,基本上呈一条直线,并且波动性不大。
下图给出面齿轮轮齿在一个啮合周期内5个啮合位置的接触情况。
其中:图3为初始啮合位置的接触情况,图4为啮合终了位置的接触情况。
图中显示了不同啃合位置面齿轮轮齿接触区域的位置和形状变化,反映了齿轮副的啃合性能。
理论上讲,面齿轮啃合时为点接触,而在加载时齿面形成椭圆状接触区,接触区的大小用接触椭圆的长轴来衡量。
基于ANSYS/LS 2DY NA 的直齿锥齿轮动力学接触仿真分析高 翔,程建平(江苏大学汽车与交通工程学院,江苏镇江 212013)摘要:针对直齿锥齿轮疲劳破坏中出现儿率最高的齿面接触疲劳强度问题,在UG 中建立齿轮几何模型,利用ANSYS/LS 2DY NA 对齿轮进行动力学接触仿真分析,计算了齿轮副在啮合过程中齿面接触应力、应变的变化情况及两对轮齿同时接触过程中接触压力的分布情况。
关键词:直齿锥齿轮;AN S YS /LS 2D Y NA;动力学;接触仿真分析中图分类号:TH132.421 文献标识码:A 文章编号:1006-0006(2008)02-0050-02Dynam ic Contact Emulate Analysis of Bevel Gear with ANSYS/LS 2DY NAGAO X iang,CHEN G J ian 2ping(School of Aut omotive and Traffic Engineering,J iangsu University,Zhenjiang 212013,China )Ab s tra c t:Geometrical model of a bevel gear is established and bevel gear dyna m ic emulati on analysis is operatedwith ANSYS/LS 2DY NA s oft w are f or that the fatigue failure p r obability of bevel gear is the highest in t ooth surfaces contact fatigue resistance .The contact stress and def or mati on during the meshing p r ocess are calculated .And the distributi on of contact f orce is calculated when t w o pairs of teeth contact si m ultaneously .Key wo rd s:Bevel gear;ANSYS/LS 2DY NA;Dyna m ic;Contact si m ulati on analysis 由于车用齿轮的传动比和传递功率大,加工难度与成本都相当高,所以如何提高车用齿轮的传动性能与使用寿命,近年来一直深受社会各界的广泛关注。
浅谈ANSYS Workbench接触设置0、引言ANSYS中的接触可涉及位移、电压、温度、磁场等自由度,在这些接触中,涉及位移自由度的接触是比较复杂的。
本文大概介绍了ANSYS中接触求解的原理,并使用ANSYS Workbench计算了两圆柱接触和轮齿接触的接触应力并与赫兹公式进行了对比,最后给使用ANSYS Workbench求解接触时提供了一些建议。
鉴于作者水平有限,难免会存在一些错误,希望广大读者批评指正。
1、ANSYS接触公式理论接触处理往往是复杂的。
可能的话推荐使用程序默认的设置。
因为现实接触体之间不会相互穿透,程序必须在两个表面之间建立一种关系,在分析中阻止彼此穿透。
程序阻止相互穿透的行为被称之为强制“接触兼容性”。
图1 接触穿透示意图为了在接触界面上强制执行兼容性,Workbench Mechanical通常提供了几个接触公式。
这些公式定义了使用的求解方法。
图2 接触算法设置界面•纯罚函数法•增广拉格朗日法•常规拉格朗日法•多点约束(MPC)法•梁(beam)如果穿透在一个接触容差(FTOLN*下层单元的深度)范围内,接触兼容性则是满足的。
接触深度是一个接触对中每个接触单元深度的平均值。
如果程序检测到任意穿透大于这个容差,全局求解仍然认为是不收敛的,即使残余力和位移增量达到了收敛准则。
图3 下层单元深度示意图2、纯罚函数法和增广拉格朗日法接触公式对于非线性实体接触面,可使用纯罚函数公式或者增广拉格朗日法公式。
这两个都是基于罚函数接触公式:F Normal=K Normal*X Penetration有限接触力F Normal,是接触刚度K Normal的函数。
接触刚度越高,接触穿透X Penetration越小,如下图说明:图4 接触刚度与接触穿透的示意图理想的,对于一个无限大的接触刚度K Normal,可以获得一个0穿透。
在基于罚函数方法下这在数值上是不可能的,但是,如果只要X Penetration足够小或者可以忽略,则认为求解结果是精确的。