第八章典型液压系统
- 格式:ppt
- 大小:1.19 MB
- 文档页数:22
第八章液压基本回路§1 概论一、液压回路的组成一般液压回路的主要元件的动力传递关系为:原动机液压泵液压阀液动机负载。
原动机将机械能输入液压系统,由液压动力元件—-液压泵转变为液压能,通过控制元件——液压阀调整控制压力油的方向、流量和压力的大小,然后传递给执行元件——液动机,使其按照一定的方向、速度和出力带动负荷运动和工作,构成液压回路。
原动机主要有交流电动机、直流电动机和内燃机等。
液压阀、液压泵和液动机等互相配合构成三种基本类型的控制回路,即压力控制回路,方向控制回路和速度控制回路。
此外,还有由此派生出来的位置控制回路和时间控制回路。
有时,一个回路可同时兼有几种职能。
二、液压回路的表示方法液压回路可用以下几种表示方法。
1.外观图它能直观地表示出各液压元件的形状、位置和管路的联接走向,不能表示出元件的内部结构和液压系统的工作原理,一般仅用于装配工作。
2.截面图它直接表现出各元件的内部结构和系统的工作原理,便于理解和查找故障,但因制图较麻烦,一般仅用于教学。
3.符号图它用简单的符号把复杂的液压系统表现出来,它既能表现出各元件之间管路的联接方法,又可以说明它的工作原理,制图也很简单.但是事先必须对各种元件的符号,工作原理和职能有充分的了解,否则看不懂符号图.这种方法被国内外广泛应用。
4.混和图为了特别说明某元件的工作原理或不便于用符号表示液压元件时,可在符号图中采用局部截面图.三、开式回路和闭式回路液压系统按照油液的循环情况可分开式回路和闭式回路.开式回路中液动机的回油流到一个大气压条件下的开式油箱,液压泵靠自吸能力将油箱中的油液输入液压工作系统。
闭式回路中液动机的回油直接输入液压泵的吸油口,形成封闭的回路。
开式回路结构简单,油液散热条件好,但是它的油箱体积较大,空气与油液的接触机会较多,因而容易混入空气,使系统工作不够稳定。
开式回路要求液压泵有较好的自吸能力,对于自吸能力较差的柱塞泵等,需设置辅助液压泵.闭式回路比开式回路效率高。
单元七典型液压系统学习目标:1.掌握读懂液压系统图的阅读和分析方法2.掌握YT4543型液压动力滑台液压系统的组成、工作原理和特点3.掌握YB32-200型压力机液压系统的组成、工作原理和特点4.掌握Q2—8汽车起重机液压系统的组成、工作原理和特点5.能绘制电磁铁动作循环表重点与难点:典型液压系统是对以前所学的液压件及液压基本回路的结构、工作原理、性能特点、应用,对液压元件基本知识的检验与综合,也是将上述知识在实际设备上的具体应用。
本章的重点与难点均是对典型液压系统工作原理图的阅读和各系统特点的分析。
对于任何液压系统,能否读懂系统原理图是正确分析系统特点的基础,只有在对系统原理图读懂的前提下,才能对系统在调速、调压、换向等方面的特点给以恰当的分析和评价,才能对系统的控制和调节采取正确的方案。
因此,掌握分析液压系统原理图的步骤和方法是重中之重的内容。
1.分析液压系统工作原理图的步骤和方法对于典型液压系统的分析,首先要了解设备的组成与功能,了解设备各部件的作用与运动方式,如有条件,应当实地考察所要分析的设备,在此基础上明确设备对液压系统的要求,以此作为液压系统分析的依据;其次要浏览液压系统图,了解所要分析系统的动力装置、执行元件、各种阀件的类型与功能,此后以执行元件为中心,将整个系统划分为若干个子系统油路;然后以执行元件动作要求为依据,逐一分析油路走向,每一油路均应按照先控制油路、后主油路,先进油、后回油的顺序分析;再后就是针对执行元件的动作要求,分析系统的方向控制、速度控制、压力控制的方法,弄清各控制回路的组成及各重要元件的作用;更后就是通过对各执行元件之间的顺序、同步、互锁、防干扰等要求,分析各子系统之间的联系;最后归纳与总结整个液压系统的特点,加深对系统的理解。
2.在此选用YT4543型组合机床动力滑台的液压系统,作为金属切削专用机床进给部件的典型代表。
此系统是对单缸执行元件,以速度与负载的变换为主要特点。

第8章典型液压系统章典型液压系统组合机床液压系统第一节组合机床液压系统一、组合机床液压系统组合机床液压系统主要由通用滑台和辅助部分(如定位、夹紧)组成。
动力滑台本身不带传动装置,可根据加工需要安装不同用途的主轴箱,以完成钻、扩、铰、镗、刮端面、铣削及攻丝等工序。
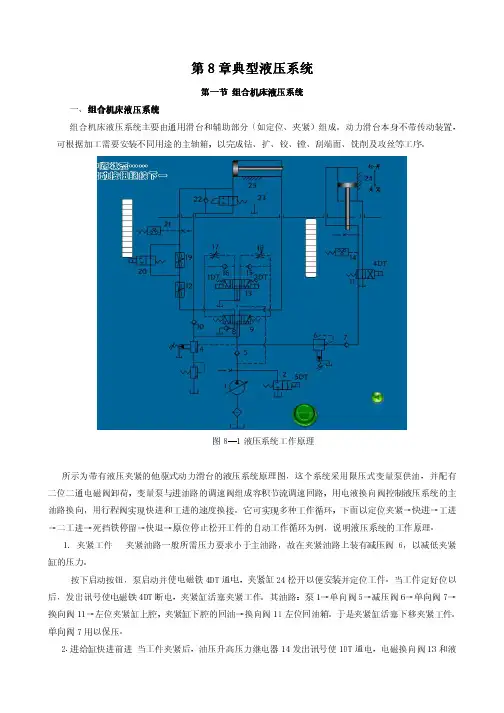
图8—1液压系统工作原理所示为带有液压夹紧的他驱式动力滑台的液压系统原理图,这个系统采用限压式变量泵供油,并配有二位二通电磁阀卸荷,变量泵与进油路的调速阀组成容积节流调速回路,用电液换向阀控制液压系统的主油路换向,用行程阀实现快进和工进的速度换接。
它可实现多种工作循环,下面以定位夹紧→快进→工进→二工进→死挡铁停留→快退→原位停止松开工件的自动工作循环为例,说明液压系统的工作原理。
1. 夹紧工件 夹紧油路一般所需压力要求小于主油路,故在夹紧油路上装有减压阀6,以减低夹紧缸的压力。
按下启动按钮,泵启动并使电磁铁4DT通电,夹紧缸24松开以便安装并定位工件。
当工件定好位以后,发出讯号使电磁铁4DT断电,夹紧缸活塞夹紧工作。
其油路:泵1→单向阀5→减压阀6→单向阀7→换向阀11→左位夹紧缸上腔,夹紧缸下腔的回油→换向阀11左位回油箱。
于是夹紧缸活塞下移夹紧工件。
单向阀7用以保压。
2.进给缸快进前进 当工件夹紧后,油压升高压力继电器14发出讯号使1DT通电,电磁换向阀13和液动换向阀9均处于左位。
其油路为:进油路:泵1→单向阀5→液动阀9→左位行程阀23右位→进给缸25左腔回油路:进给缸25右腔→液动阀9左位→单向阀10→行程阀23右位→进给缸25左腔。
于是形成差动连接,液压缸25快速前进。
因快速前进时负载小,压力低,故顺序阀4打不开(其调节压力应大于快进压力),变量泵以调节好的最大流量向系统供油。
3.一工进 当滑台快进到达预定位置(即刀具趋近工件位置),挡铁压下行程阀23,于是调速阀12接入油路,压力油必须经调速阀12才能进入进给缸左腔,负载增大,泵的压力升高,打开液控顺序阀4,单向阀10被高压油封死,此时油路为:进油路:泵1→单向阀5→换向阀9左位→调速阀12→换向阀20右位→进给缸25左腔回油路:进给缸25右腔→换向阀9左位→顺序阀4→背压阀3→油箱。
1、解:液压系统分析如下:8.3.1 首先弄清主机的工作特点、动作循环和性能要求机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。
JSOl型机械手具有手臂升降、伸缩、回转和手腕回转、手指夹紧五种功能,另外,为保证定位精度,手臂回转机构装有定位装置。
JSOl工业机械手完成的动作循环为“插定位销—手臂前伸—手指张开—手指夹紧抓料—手臂上升—手臂缩回—手腕回转—拔定位销—手臂回转—插定位销—手臂前伸—手臂中停—手指松开—手指闭合—手臂缩回—手臂下降—手腕回转复位—拔定位销一手臂回转复位,泵卸载。
8.3.2确定系统类型该系统为双泵(双联泵)、开式系统。
参考相关资料可知双联泵额定工作压力为 6.3MPa,大、小液压泵供油量分别为35L/min、18L/min。
手臂升降及伸缩时双泵同时供油,流量为(35+18)L/min(此时,实现手臂升降及伸缩的快速运动),手臂及手腕回转、手指松紧及定位缸工作时,仅由小流量泵2供油,大流量泵1自动卸载(由电磁线圈1Y通电控制)。
8.3.3组成系统的划分及其作用划分组成系统的子系统、基本回路,并分析组成子系统的基本回路及关键压元件在系统中的作用。
JSOl工业机械手液压系统可分为手臂升降、手臂伸缩、手臂回转、手腕回转、手指夹紧及手臂回转定位6个液压子系统。
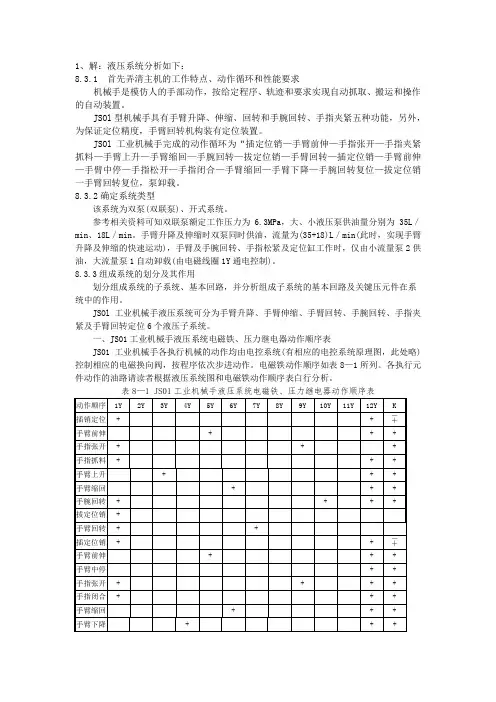
一、JS01工业机械手液压系统电磁铁、压力继电器动作顺序表JS01工业机械手各执行机械的动作均由电控系统(有相应的电控系统原理图,此处略)控制相应的电磁换向阀,按程序依次步进动作。
电磁铁动作顺序如表8—1所列。
各执行元件动作的油路请读者根据液压系统图和电磁铁动作顺序表白行分析。
表8—1 JS01工业机械手液压系统电磁铁、压力继电器动作顺序表二、手臂升降、伸缩、回转及手腕回转的速度控制手臂的伸缩和升降采用单杆双作用液压缸驱动,手臂的伸出和升、降速度分别由单向调速阀15、13和11实现回油节流调速;手臂及手腕的回转由摆动液压缸驱动,其正、反向运动也采用单向调速阀l7和18、23和24回油节流调速。