某纯电动汽车CAN网络设计
- 格式:pdf
- 大小:123.49 KB
- 文档页数:4

1 引言can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。
由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。
本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
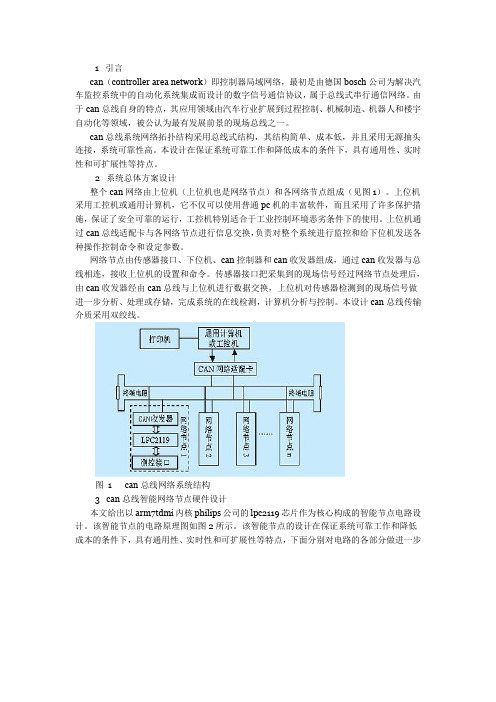
2 系统总体方案设计整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。
上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。
上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。
传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。
本设计can总线传输介质采用双绞线。
图 1 can总线网络系统结构3 can总线智能网络节点硬件设计本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。
该智能节点的电路原理图如图2所示。
该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
图2 can总线智能网络点3.1 lpc2119处理器特点lpc2119是philips公司推出的一款高性价比很处理器。

can总线接口电路设计Can总线是一种用于车辆电子系统中的通信接口,它在汽车电子技术中起着至关重要的作用。
本文将围绕Can总线接口电路的设计展开讨论。
Can总线是Controller Area Network的缩写,它是一种串行通信协议,旨在提供高可靠性、实时性和高带宽的数据通信。
Can总线接口电路的设计是为了实现Can总线与其他电子设备的连接和数据传输。
我们需要考虑Can总线的物理层接口电路。
Can总线使用差分信号传输,因此需要设计差分发送器和差分接收器。
差分发送器将逻辑高和逻辑低分别转换为正向和负向的差分信号,而差分接收器则将差分信号还原为逻辑高和逻辑低。
这样的设计可以提高信号的抗干扰能力,保证数据的可靠传输。
我们需要考虑Can总线的协议层接口电路。
Can总线采用帧格式进行数据传输,因此需要设计帧格式解析器和帧格式生成器。
帧格式解析器用于解析接收到的帧数据,提取出其中的控制信息和数据信息。
而帧格式生成器则用于生成符合Can总线协议的帧数据,并将其发送出去。
这样的设计可以保证数据的正确解析和生成,实现与其他设备的有效通信。
除了物理层和协议层接口电路,Can总线接口电路还需要考虑其他功能模块。
例如,需要设计时钟模块来提供时钟信号,以保证数据传输的同步性。
同时,还需要设计中断模块来处理Can总线接收到的中断信号,及时响应和处理来自其他设备的请求。
在Can总线接口电路的设计中,还需要考虑电路的功耗和成本。
可以采用低功耗的设计方案,选择低功耗的器件和电源管理电路,以降低整个系统的功耗。
同时,还需要根据实际的应用需求选择适当的元器件和电路结构,以降低系统成本。
Can总线接口电路的设计是为了实现Can总线与其他电子设备的连接和数据传输。
它涉及到物理层接口电路、协议层接口电路以及其他功能模块的设计。
在设计过程中,需要考虑信号的抗干扰能力、数据的可靠传输、接口的兼容性、功耗的控制以及成本的降低等因素。
通过合理的设计和选型,可以实现高可靠性、实时性和高带宽的数据通信,进而提升车辆电子系统的性能和功能。

某纯电动轻型客车CAN总线车载网络系统开发某纯电动轻型客车CAN总线车载网络系统开发汽车行业在智能化和电动化方面的快速发展,使得车载网络系统和电子控制系统的重要性越来越显著。
特别是纯电动车型,车载网络系统和电子控制系统的设计和开发尤为重要。
在此背景下,某纯电动轻型客车CAN总线车载网络系统开发的研究工作就显得尤为紧迫和必要。
本研究基于CAN总线技术,设计了一套适用于某纯电动轻型客车的车载网络系统。
该系统的主要特点是采用多跳CAN总线拓扑结构,实现了多节点之间的高速、可靠、低延迟的通讯。
同时,在硬件上对CAN总线芯片进行了选型和设计,配合适当的外设,实现了包括数据采集、监控、控制等完整的车载网络系统功能。
为了保证系统的稳定性和可靠性,本研究在软件上根据车辆各个功能模块的需求,采用了先进的CAN总线通讯协议,并参考了相关的国际标准和规范。
同时,本研究还针对CAN总线通讯数据的传输、过滤、校验等方面进行了改进和优化,从而保证长时间高速运行下的通讯性能和数据完整性。
本系统实现了多节点之间的实时数据通讯和控制,能够满足车辆的多种功能要求,如充电管理、电池管理、动力控制、驾驶辅助、音频娱乐等。
同时,本系统还具有可扩展性和可定制性,能够适应不同客户的特殊需求。
在实际测试中,本系统已经通过了各种严酷的环境和性能测试,表现出了优秀的性能和可靠性。
本系统的开发成功,为某纯电动轻型客车的推广和普及提供了坚实的技术基础。
总之,本研究基于CAN总线技术,设计了一套适用于某纯电动轻型客车的车载网络系统,实现了多节点的高速、可靠、低延迟通讯和完整的车载网络功能,具有可扩展性和可定制性,为某纯电动轻型客车的发展做出了重要贡献。
除此之外,本系统还考虑了安全性问题。
对于车载网络系统而言,安全往往是一个非常重要的考虑因素。
因此,我们在系统设计的过程中,充分考虑了安全机制的设计。
首先,我们采用了CAN总线上加密的方式,保护了通讯内容的安全性,从而避免了黑客攻击和数据泄露的风险。

汽车电子与汽车CAN总线网络实验开发系统的设计PFAutoECU-IV硬件参数:1、1个组合仪表单元:1)核心处理器为16位汽车专用处理器芯片,具备大容量Flash、SRAM,并具备CAN总线、LCD驱动、微型步进电机驱动接口等,为组合仪表常用处理器;2)4个指针仪表:发动机转速表、车速表、燃油油量表、发动机冷却液温度表;3)多个LED指示灯:远光灯、近光灯、左/右转向灯、发动机故障报警灯等20余个;4)段位LCD显示器,指示时间、单次里程数、总里程数等信息;5)具备程序下载、调试仿真接口;6)具备1路CAN总线接口,符合ISO 11898-2物理层标准;2、1个中央舒适系统控制单元:1)1个无线遥控接收器,并配套无线遥控发射器1个;2)1路大功率继电器输出接口,用于车内照明灯等用电控制;3)具备转向灯信号输出接口等多路大功率用电器输出接口;4)具备8路开关量输入接口(符合汽车使用环境设计),具备软硬件自诊断功能;5)具备KWP1281诊断协议所需K-LINE硬件接口;6)具备程序下载、调试仿真接口;7)具备1路CAN总线接口,符合ISO 11898-2物理层标准;3、1个左前门左前组合灯控制单元:1)5路大功率用电器输出接口,用于车左前灯光控制;2)具备4路伺服电机驱动接口,用于电动车窗电机、车门门锁电机、后视镜电机控制;3)具备8路高开关量输入接口(符合汽车使用环境设计),用于系统功能扩展;4)具备8路AD输入接口,用于车锁、车窗控制组合开关输入;5)具备自诊断硬件电路;6)具备程序下载、调试仿真接口;7)具备1路CAN总线接口,符合ISO 11898-2物理层标准;4、1个右前门右前组合灯控制单元:1)5路大功率用电器输出接口,用于车右前灯光控制;2)具备4路伺服电机驱动接口,用于电动车窗电机、车门门锁电机、后视镜电机控制;3)具备8路高开关量输入接口(符合汽车使用环境设计),接入右前车窗升降开关等;4)具备8路AD输入接口,用于系统功能扩展;5)具备自诊断硬件电路;6)具备程序下载、调试仿真接口;7)具备1路CAN总线接口,符合ISO 11898-2物理层标准;5、1个左后门左后灯控制单元:1)5路大功率用电器输出接口,用于车左后灯光控制;2)具备8路高开关量输入接口(符合汽车使用环境设计),接入左后车窗升降开关等;3)具备8路AD输入接口,用于系统功能扩展;4)具备自诊断硬件电路;5)具备程序下载、调试仿真接口;6)具备1路CAN总线接口,符合ISO 11898-2物理层标准;6、1个右后门右后灯控制单元:1)5路大功率用电器输出接口,用于车左后灯光控制;2)具备8路高开关量输入接口(符合汽车使用环境设计),接入右后车窗升降开关等;3)具备8路AD输入接口,用于系统功能扩展;4)具备自诊断硬件电路;5)具备程序下载、调试仿真接口;6)具备1路CAN总线接口,符合ISO 11898-2物理层标准;7、1个OBD故障自诊断接口单元:1)标准OBD II物理接口,硬件满足ISO 15756、KWP1281等诊断要求;8、1个发动机信号模拟单元:1)具备2路数字脉冲输出接口;2)具备2路模拟脉冲输出接口,可编程实现任意信号波形;3)具备2路电位器输出接口;4)具备4路电位器输入接口,板载电位器;5)具备4路开关量输入开关;6)具备1路CAN总线接口,符合ISO 11898-2物理层标准;7)具备JTAG编程接口。

目次1范围 (2)2规范性引用文件 (2)3定义和术语 (2)4总体设计要求 (2)CAN总线架构详见图1。
(2)5总线拓扑 (3)6导线 (4)6.1导线的参数 (4)6.2双绞线在连接器处的绞缠要求 (4)7整车供电要求 (4)8总线故障管理 (4)8.1节点故障 (4)8.2开路和短路故障 (5)9周期型消息和混合型消息的周期偏差 (6)1范围本范规覆盖整车CAN网络盖物理层、数据链路层、交互层的相关要求。
本规范适用于汽车各车型。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO11898-1: 道路车辆-电控单元局域网(CAN)—第一部分:数据链路层和物理信号ISO11898-2: 道路车辆-电控单元局域网(CAN)—第二部分:高速介质访问单元ISO11898-5: 道路车辆-电控单元局域网(CAN)—第五部分:低功耗模式的高速介质访问单元SAE J2284-3: 500 Kbps下车辆用高速CANISO 15765-4: 道路车辆-控制局域网络诊断(CAN)—第四部分:排放相关系统要求3定义和术语下列术语和定义适用于本文件。
3.1术语的用法如下:“要求”:表示一种必须/强制的需求。
“应当”:表示一种推荐或建议。
“必须”:表示一种合法或标准的需求。
“将会”:表示一种预计的考虑情况,或者一种附加或可选的特性。
“可以”:表达一种被允许的行为或方法,并不认定为需求。
3.2缩写,缩写词、定义和符号4总体设计要求CAN总线架构详见图1。
CANH CANL C图1 CAN 总线架构以下章节详细描述了物理层、数据链路层和交互层的参数: 物理层要求基于ISO11898-2/ISO11898-5/ISO15765-4; 数据链路层要求基于ISO11898-1/ISO15765-4; 交互层要求基于OSEK/VDX 和 AUTOSAR 。
基于CAN网络的电动汽车网络设计严永利,王昌会湖南吉利汽车部件有限公司,(411100)E-mail:94582531@摘要:CAN(Controller Area Network)总线是一种有效支持分布式控制和实时控制的串行通讯网络,主要用于汽车的监测和控制,目前已经在汽车的电器网络中得到了广泛的应用。
相对于传统燃油车而言,电动汽车的电器部件数量较多(如BMS、MCU、ACC、车载充电机等),为满足各电器部件之间的连接及实时性通讯要求,本文针对电动汽车设计实现了一种CAN网络控制系统。
关键词:CAN总线,汽车网络,电动汽车,ECU1 引言随着电子技术的迅猛发展和在汽车上的广泛应用,汽车电子化程度越来越高。
德国Bosch公司为汽车应用而开发的多主机局部网络,即控制器局域网CAN(Controller Area Network),作为一种技术先进、可靠性高、功能完善、成本较低的网络通讯控制方式,CAN 总线广泛应用于汽车工业、航空工业、工业控制、安防监控、工程机械、医疗器械、楼宇自动化等领域。
CAN总线技术是现代汽车广泛使用的一种汽车通讯技术,也是唯一成为国际标准的现场总线。
近年来随着电动汽车的发展,CAN总线技术设计和应用的重要性更加突出。
2 CAN网络简介CAN(Controller Area Network)即控制器局域网,是一种有效支持分布式控制和实时控制的串行通讯网络。
CAN通讯协议主要描述设备之间的信息传递方式。
CAN协议规范中关于层的定义与开放系统互连(OSI)模型一致,设备中的每一层与另一设备上相同的那一层通讯,实际的通讯发生在每一设备上相邻的两层,而设备只通过模型物理层的物理介质互连。
CAN协议的一个最大特点是废除了传统的站地址编码,取而代之以对通信数据块进行编码,这样可使网络内的节点个数在理论上不受限制。
CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。