云台命令集
- 格式:doc
- 大小:31.50 KB
- 文档页数:1

40倍高清云台摄像机使用说明书VCC-HD740S-SMC©Bolin Technology目录操作规则 (2)重要信息 (2)法律须知 (2)清单 (4)概述 (5)特性 (5)产品示图 (6)摄像机功能示图 (6)遥控器功能示图 (7)系统配置 (9)视频信号 (10)音频输入/输出 (10)摄像机控制和系统配置 (11)红外遥控器控制 (11)RS-232控制(VISCA) (11)RS-422/RS-485控制 (14)RS-422连接 (14)RS-485连接 (16)拨码开关 (19)OSD菜单设置 (21)OSD菜单说明 (21)曝光设置 (22)白平衡设置 (24)图像菜单1 (25)图像菜单2 (26)云台及变倍设置 (26)系统设置 (27)固件升级 (28)红外遥控操作 (29)云台和变倍操作 (29)红外遥控器控制多个摄像机 (30)调整摄像机聚焦 (30)预置位设置功能 (31)调整摄像机 (32)AI功能模式 (33)OSD功能示图 (35)尺寸图 (36)参数表 (37)操作规则感谢购买我们的产品。
如果有任何问题,请联系授权经销商。
在操作产品之前,请阅读本手册并保留备查。
版权保凌影像版权所有。
不得复制本手册的任何部分,如需发布在任何应用中或通过任何方式修改,必须得到我司事先书面同意。
商标●和其他Bolin的商标和标志都是Bolin Technology的财产。
●Microsoft、Windows、ActiveX和Internet Explorer是Microsoft公司在美国或其他国家注册商标。
●HDMI、HDMI LOGO和高清多媒体接口是HDMI许可证、LLC在美国和其他国家的商标或注册商标。
●该软件可能包含H.264/AVC视频技术,其使用需要来自MPEG-LA,L.C的以下通知。
本软件根据AVC专利组合许可证获得许可,用于消费者的个人和非商业用途:(I)按照AVC标准(“AVC视频”)对视频进行编码,或((II)对从事个人和非商业活动的消费者编码的AVC视频进行解码,或从获得许可的视频提供商处获取的AVC视频进行解码。

网络高清智能高速云台摄像机安装和使用手册(1).网络高清智能高速云台摄像机中文使用手册在使用本产品之前,敬请您仔细阅读使用手册!安全提示: 注意防止触电危险.请不要打开!注意:为了减少触电危险,请勿自行拆卸。
里面没有用户自己可修理的零件。
应由有资格的人员进行维修工作。
!在正三角形中闪烁的箭头符号,用以提醒用户在本产品中附近出现较大的“非绝缘危险点电压”,足以对人体产生危险。
在正三角形中的注意号,用以提醒用户参考有关该机的重要操作与维护的文字说明。
本产品的制造号标示于底部或侧面。
请在下面空白处填上本机的制造号码,并将此说明书妥善保存,以便需要时查核。
型号:制造号码:V2.0 ,用以提醒用户参考有关该机的重要操作与维护的文字说明。
!目录注意事项 (1第一章功能特点 (3 1.1 云台规格 (31.2 云台基本参数 (3 1.3 云台报警 (31.4 网络参数 (41.5 云台功能 (6第二章网络设臵 (7 2.1 系统连接图 (7 2.2 登录网络 (82.3 预览视频 (10 2.4 设备参数 (15 2.5 语音对讲 (29 2.6 文件管理 (29 2.7 远程回放 (32 2.8 本地设臵 (362.9 设备录像 (373.0 注销重启 (37第三章云台设定 (383.1 系统连接 (383.2 云台拨码设定 (383.3 协议和默认波特率选设定 (403.4 通信波特率的设定 (41第四章安装说明 (434.1 安全措施 (434.2 警告 (434.3 环境要求 (444.4 布线安全 (444.5 安装准备 (444.6 安装方式简介 (464.7 安装说明 (464.8 云台的出线说明 (50附录Ⅰ:系统参数表 (52附录Ⅱ:常见故障分析 (58附录Ⅲ:24VAC 线径和传输距离关系表 (59 附录Ⅳ:防雷击、浪涌 (61附录Ⅴ:维修服务条款 (62注意事项:电气安全在本产品安装使用中必须严格遵守国家和地区各项电气标准。
大华网络SDK编程手册VERSION 3.1.8(Build 070321)2007-3-21版权所有侵权必究前言非常感谢您使用我们公司的设备,我们将为您提供最好的服务。
本手册可能包含技术上不准确的地方或印刷错误,欢迎指正。
我们将会定期更新手册的内容。
修订记录目录1 简介 (8)1.1概述 (8)1.2适用性 (9)1.3特色功能 (9)2 设计原则 (11)2.1编程说明 (11)2.2典型调用顺序 (12)3 数据结构定义 (18)3.1客户端数据结构 (18)3.1.1 设备信息结构 (25)3.1.2 时间信息 (26)3.1.3 录像文件信息 (26)3.1.4 设备状态信息 (27)3.1.5 系统配置信息结构 (35)4 接口定义 (36)4.1SDK初始化 (36)4.2状态侦听 (39)4.3字符叠加 (44)4.4设备注册 (45)4.5实时监视 (48)4.6音频控制 (54)4.7数据保存 (56)4.8视频抓图 (63)4.9回放和下载 (64)4.10回放控制 (82)4.11云台控制 (88)4.12实时预览 (93)4.13系统配置 (94)4.14日志管理 (103)4.15透明串口 (105)4.16远程控制 (109)4.17录像控制 (112)4.18系统时间 (114)4.19用户管理 (115)4.20语音对讲 (119)4.21码流统计 (129)4.22IO控制 (130)4.23强制I帧 (131)4.24设置限流 (132)4.25获取设备状态 (133)4.26修改通道名称 (136)4.27DDNS查询IP (136)4.28设备参数配置 (138)5 示例功能实现 (165)5.1连接设备 (166)5.2报警信息获取 (167)5.3系统配置 (168)5.4实时监视 (168)5.5数据保存 (169)5.6回放/下载和进度指示 (169)5.7播放控制 (169)5.8预览 (170)5.9字符叠加 (170)1简介1.1概述欢迎使用大华网络SDK编程手册,网络客户端软件开发包(DVR客户端SDK)是大华网络硬盘录像机、网络视频服务器的配套产品,本文档详细描述了开发包中各个函数实现的功能、接口及其函数之间的调用关系和示例实现。
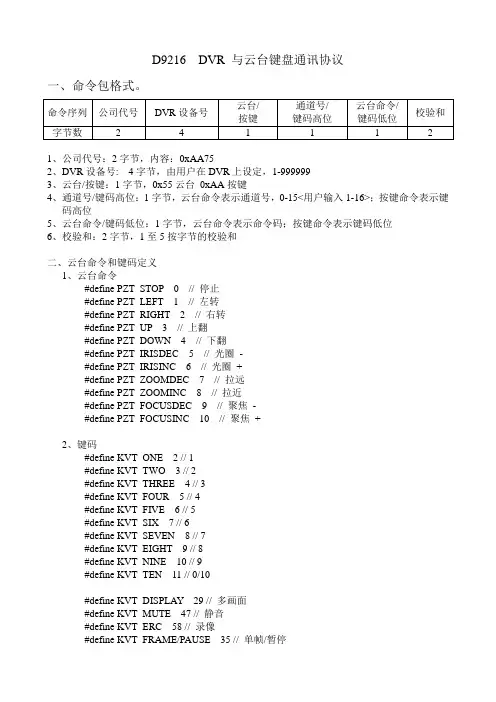
D9216 DVR 与云台键盘通讯协议一、命令包格式。
1、公司代号:2字节,内容:0xAA752、DVR设备号: 4字节,由用户在DVR上设定,1-9999993、云台/按键:1字节,0x55云台0xAA按键4、通道号/键码高位:1字节,云台命令表示通道号,0-15<用户输入1-16>;按键命令表示键码高位5、云台命令/键码低位:1字节,云台命令表示命令码;按键命令表示键码低位6、校验和:2字节,1至5按字节的校验和二、云台命令和键码定义1、云台命令#define PZT_STOP 0 // 停止#define PZT_LEFT 1 // 左转#define PZT_RIGHT 2 // 右转#define PZT_UP 3 // 上翻#define PZT_DOWN 4 // 下翻#define PZT_IRISDEC 5 // 光圈-#define PZT_IRISINC 6 // 光圈+#define PZT_ZOOMDEC 7 // 拉远#define PZT_ZOOMINC 8 // 拉近#define PZT_FOCUSDEC 9 // 聚焦-#define PZT_FOCUSINC 10 // 聚焦+2、键码#define KVT_ONE 2 // 1#define KVT_TWO 3 // 2#define KVT_THREE 4 // 3#define KVT_FOUR 5 // 4#define KVT_FIVE 6 // 5#define KVT_SIX 7 // 6#define KVT_SEVEN 8 // 7#define KVT_EIGHT 9 // 8#define KVT_NINE 10 // 9#define KVT_TEN 11 // 0/10#define KVT_DISPLAY 29 // 多画面#define KVT_MUTE 47 // 静音#define KVT_ERC 58 // 录像#define KVT_FRAME/PAUSE 35 // 单帧/暂停#define KVT_PLAY 34 // 播放#define KVT_STOP 36 // 停止#define KVT_MENU/ESC 39 // 菜单/取消#define KVT_LEFT 20 // 向左#define KVT_RIGHT 21 // 向右#define KVT_PTZ 22 // 云台#define KVT_UP 18 // 向上#define KVT_DOWN 19 // 向下3、命令示例。
云台二十八将为汉光武帝刘秀重兴汉室江山的二十八员大将。
传说是天上二十八星宿下凡转世。
后汉王朝中兴二十八将,前世以为上应二十八宿,未之详也。
然咸能感会风云,奋其智勇,称为佐命,亦各志能之士也。
议者多非光武不以功臣任职,至使英姿茂绩,委而勿用。
然原夫深图远算,固将有以焉尔。
若乃王道既衰,降及霸德,犹能授受惟庸,勋贤皆序,如管、隰之迭升桓世,先、赵之同列文朝,可谓兼通矣。
降自秦、汉,世资战力,至于翼扶王运,皆武人屈起。
亦有鬻缯屠狗轻猾之徒,或崇以连城之赏,或任以阿衡之地,故执疑则隙生,力侔则乱起。
萧、樊且犹缧绁,信、越终见菹戮,不其然乎!自兹以降,迄于孝武,宰辅五世,莫非公侯。
遂使缙绅道塞,贤能蔽壅,朝有世及之私,下多抱关之怨。
其怀道无闻,委身草莽者,亦何可胜言。
故光武鉴前事之违,存矫枉之志,虽寇、邓之高勋,耿、贾之鸿烈,分土不过大县数四,所加特进、朝请而已。
观其治平临政,课职责咎,将所谓“导之以政,齐之以刑”者乎!若格之功臣,其伤已甚。
何者?直绳则亏丧恩旧,桡情则违废禁典,选德则功不必厚,举劳则人或未贤,参任则群心难塞,并列则其敝未远。
不得不校其胜否,即以事相权。
故高秩厚礼,允答元功,峻文深宪,责成吏职。
建武之世,侯者百余,若夫数公者,则与参国议,分均休咎,其余并优以宽科,完其封禄,莫不终以功名延庆于后。
昔留侯以为高祖悉用萧、曹故人,而郭亦讥南阳多显,郑兴又戒功臣专任。
夫崇恩偏授,易启私溺之失,至公均被,必广招贤之路,意者不其然乎!永平中,显宗追感前世功臣,乃图画二十八将于南宫云台,其外又有王常、李通、窦融、卓茂,合三十二人。
故依其本弟系之篇末,以志功臣之次云尔。
●邓禹字仲华,南阳新野人●吴汉字子颜,南阳宛人●贾复字君文,南阳冠军人●耿弇字伯昭,扶风茂陵人●寇恂字子翼,上谷昌平人●岑彭字君然,南阳棘阳人●冯异字公孙,颍川父城人●朱祐字仲先,南阳宛人●祭遵字弟孙,颍川颍阳人●景丹字孙卿,冯翊栎阳人●盖延字巨卿,渔阳要阳人●铫期字次况,颍川郏人●耿纯字伯山,巨鹿宋子人●臧宫字君翁,颍川郏人●马武字子张,南阳湖阳人●刘隆字元伯,南阳安众侯宗室●马成字君迁,南阳棘阳人●王梁字君严,渔阳要阳人●陈俊字子昭,南阳西鄂人●杜茂字诸公,南阳冠军人●傅俊字子卫,颍川襄城人●坚镡字子伋,颍川襄城人●王霸字元伯,颍川颍阳人●任光字伯卿,南阳宛人●李忠字仲都,东莱黄人●万修字君游,扶风茂陵人●邳彤字伟君,信都人●刘植字伯先,巨鹿昌城人太傅高密侯邓禹角木蛟大司马广平侯吴汉亢金龙左将军胶东侯贾复氐土貉建威大将军好畤侯耿弇房日兔(常用兵器:戟)执金吾雍奴侯寇恂心月狐(枪)征南大将军舞阳侯岑彭尾火虎(刀)征西大将军夏阳侯冯异箕水豹建义大将军鬲侯朱祐斗木豸(枪)征虏将军颖阳侯祭遵斗金牛骠骑大将军栎阳侯景丹女土蝠虎牙大将军安平侯盖延虚日鼠(斧)卫尉安成侯铫期井木犴(戟)东郡太守东光侯耿纯室火猪(刀)捕虏将军扬虚侯马武奎木狼(戟)中山太守全椒侯马成胃土雉(斧)河南尹阜成侯王梁昂日鸡(枪)琅邪太守祝阿侯陈俊毕月乌(刀)骠骑大将军参蘧侯杜茂参水猿积弩将军昆阳侯傅俊觜火猴左曹合肥侯坚镡危月燕(刀)上谷太守淮阳侯王霸鬼金羊(枪)信都太守阿陵侯任光柳土獐(刀)豫章太守中水侯李忠星日马(箭)右将军槐里侯万修张月鹿(鞭)太常灵寿侯邳彤翼火蛇(戟)骁骑将军昌成侯刘植轸水蚓城门校尉朗陵侯臧宫壁水獐(戟、鞭) 骠骑将军慎侯刘隆娄金狗(剑)云台列将32人,前28人为开国功臣,上应28宿,就是云台28将。
世林球机云台协议随着科技的不断发展,人们对于监控设备的需求也越来越高。
球机作为一种常见的监控设备,其云台功能的优劣直接影响着用户的使用体验。
为了实现球机云台的高效控制,世林公司提出了世林球机云台协议,该协议旨在提供一种统一的球机云台控制标准,以便不同厂商的球机能够互相兼容,实现更加灵活、便捷的操作。
世林球机云台协议是一种基于网络通信的协议,通过网络连接,用户可以通过电脑、手机等终端设备对球机进行远程控制。
该协议采用了标准的网络传输协议,如TCP/IP协议,确保了数据的可靠传输。
世林球机云台协议定义了一系列控制命令,包括云台的转动、焦距调节、光圈控制等功能。
用户可以通过发送相应的指令来实现对球机的控制。
例如,用户可以发送一个控制指令来使球机向左转动,或者发送一个指令来调整球机的焦距。
通过这些命令,用户可以实现对球机的灵活控制,满足不同场景的需求。
世林球机云台协议还规定了数据的格式和解析方式。
用户在发送控制命令时,需要按照一定的格式进行封装,并在接收端进行相应的解析。
这样可以确保数据的正确传输和解析,避免因数据格式不一致而导致的控制失败。
世林球机云台协议的优点在于其开放性和兼容性。
世林公司将协议的详细规范公开,并提供相应的开发工具和文档,使其他厂商可以根据该协议进行球机的开发和集成。
这样,用户可以在不同厂商的球机之间实现互操作,无需为了使用不同品牌的球机而学习不同的操作方法。
世林球机云台协议还支持第三方应用的集成。
用户可以通过开放的API接口,将球机的控制功能嵌入到自己的应用中。
例如,用户可以在自己的监控系统中添加球机控制的功能模块,实现对球机的集中管理和控制。
总结起来,世林球机云台协议是一种基于网络通信的标准协议,用于实现球机的远程控制。
该协议定义了一系列控制命令和数据格式,保证了球机的高效控制和数据传输。
世林球机云台协议具有开放性和兼容性,可以与不同厂商的球机进行互操作,同时支持第三方应用的集成。
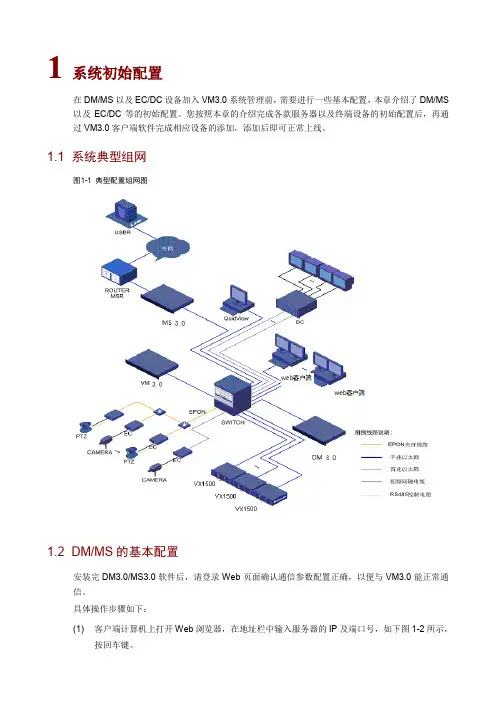
1 系统初始配置在DM/MS以及EC/DC设备加入VM3.0系统管理前,需要进行一些基本配置,本章介绍了DM/MS 以及EC/DC等的初始配置。
您按照本章的介绍完成各款服务器以及终端设备的初始配置后,再通过VM3.0客户端软件完成相应设备的添加,添加后即可正常上线。
1.1 系统典型组网图1-1典型配置组网图1.2 DM/MS的基本配置安装完DM3.0/MS3.0软件后,请登录Web页面确认通信参数配置正确,以便与VM3.0能正常通信。
具体操作步骤如下:(1) 客户端计算机上打开Web浏览器,在地址栏中输入服务器的IP及端口号,如下图1-2所示,(2) 在登录对话框中输入管理员密码admin,点击<登录>按钮,即可进入Web页面。
登录系统后,进入[系统配置/通信参数配置]页面,确认服务器IP地址(VM3.0/ISC3000-E的IP地址)是否正确,其他参数保持默认值即可。
其他相关内容可参见联机帮助。
登录DM和MS需要使用IP+端口方式:●登录DM,需要在浏览器地址栏中输入DM IP:8080●登录MS,需要在浏览器地址栏中输入MS IP:8081图1-2登录服务器1.3 VX500的基本配置通过登录Web页面确认通信参数配置正确,以便与VM3.0能正常通信。
具体操作步骤如下:(1) 客户端计算机上打开Web浏览器,在地址栏中输入服务器的IP,按回车键。
(2) 在登录对话框中输入管理员密码admin,点击<登录>按钮,即可进入Web页面。
登录系统后,进入[系统配置/通信参数配置]页面,检查服务器IP地址是否正确即可,其他参数保持默认值即可。
配置VX500的阵列需要在VM3.0客户端上进行,具体操作请参见“添加VX500”。
图1-3登录VX5001.4 VX1500基本配置登录Web页面,完成VX1500的基本配置后,即可与VM3.0能正常通信。
VX1500出厂管理口(100M网口)默认IP地址为192.168.0.1。

变电站巡检机器人云台控制系统及控制方法概述随着无人驾驶技术的不断发展,变电站巡检机器人已经逐渐取代了传统的人工巡检方式,并成为现代化电网管理的重要组成部分。
变电站巡检机器人的云台控制系统是其中的关键部分,它能够实时获取巡检机器人的状态信息,并根据需要进行精确的控制。
本文将介绍变电站巡检机器人云台控制系统的基本结构和工作原理,并提出一种有效的控制方法。
一、云台控制系统的基本结构云台控制系统主要由传感器、数据处理单元和执行机构三部分组成。
传感器负责采集巡检机器人的状态信息,常用的传感器包括惯性导航传感器、视觉传感器和力传感器等。
数据处理单元对传感器采集到的数据进行处理分析,并生成控制指令。
执行机构接收控制指令,控制云台实现运动和姿态调整。
二、云台控制系统的工作原理1.传感器采集与数据处理巡检机器人通过惯性导航传感器获取自身姿态和位置信息,通过视觉传感器获取环境信息,并通过力传感器获取与外界的接触力。
传感器采集到的数据将通过数据处理单元进行处理分析。
数据处理单元可以采用滤波算法对传感器数据进行滤波和修正,提取有效的状态信息。
2.控制指令生成与优化根据传感器采集到的状态信息,数据处理单元生成控制指令。
控制指令包括云台的位置和姿态调整命令。
位置调整命令用于控制云台的水平和垂直运动,姿态调整命令用于控制云台的俯仰和横滚角度。
为了提高控制的准确性和稳定性,可以通过优化算法对控制指令进行优化,例如根据当前位置和目标位置之间的距离差异进行调整。
3.执行机构运动控制执行机构接收控制指令后,通过电机和传动装置实现云台的运动和姿态调整。
电机可以采用直流无刷电机或步进电机。
传动装置可以采用齿轮传动或同步带传动。
执行机构可以根据控制指令的要求进行精准的运动和姿态调整。
同时,执行机构应具备一定的刚度和稳定性,以适应各种工作环境和工况。
三、控制方法1.基于PID控制的位置调整位置调整控制可以采用PID控制方法。
根据当前位置和目标位置的差异,计算出位置调整量,并通过PID控制器计算出控制指令。
PELCO产品协议解析PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
诶诺基数码科技有限公司的视频解码软件可完全兼容PELCO协议,可通过PC机控制PELCO的各种设备。
本文为你详细解析PELCO常用协议之一:PELCO-D协议PELCO-D协议PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCO-D & PELCO-P协议格式高速球的设置主要包括协议的选择和消息的发送。
高速球的型号是:TMD-SCS18DN使用的协议有:BO1,ALEC,PELCO-9600,PELCO-4800,PELCO-2400,AO1,SANTACH1650,PEARMAIN,KONY19.2KB KONY20.832,HD600,LILIN,KALATEL, VCL,TOTA,WJ-FS616,PHILIPS,AD.厂家设置的是PELCO-2400.该协议的具体内容如下:PELCO-D协议一般用于矩阵和其它设备之间的通信。
Qt编写Onvif搜索及云台控制⼯具⼀、前⾔这个⼯具很早以前⼤概在2013年就想做了,后⾯杂七杂⼋的事情⼀再耽搁,记得当时最初⽤的是soap类来搜索和解析的,后⾯发现太⼤了,每次编译都要等好久,光源码⽂件加起来都快10MB了,⽽且函数名⾮常另类,⼤量的下划线等,反正本⼈⾮常不适应,近期经过⼀个朋友(QQ:408815041)的前期探索,对整个处理流程熟悉以后,发现其实⽤纯Qt也可以实现,核⼼就是udp搜索+post数据。
本程序框架的最⼤难点在找出对应的数据以及节点数据解析。
找出对应的数据可以直接使⽤官⽅的ONVIF Device Test Tool,抓包即可。
数据解析⼀开始采⽤xml的节点解析,发现根本⾏不通,因为返回的数据不是标准的xml数据,⽽是soap格式的数据,需要⽤QXmlQuery来解析。
本程序只实现了设备信息的搜索和云台控制,并未实现服务端,服务端⼀般是IPC或者NVR上来实现。
体验地址:提取码:zkeh,下⾯的bin_onviftool.zip,如果是XP系统,请先执⾏⽬录下的fixff.cmd。
⼆、Onvif介绍ONVIF致⼒于通过全球性的开放接⼝标准来推进⽹络视频在安防市场的应⽤,这⼀接⼝标准将确保不同⼚商⽣产的⽹络视频产品具有互通性。
2008年11⽉,正式发布了ONVIF第⼀版规范——ONVIF核⼼规范1.0。
随着视频监控的⽹络化应⽤,产业链的分⼯将越来越细。
有些⼚商专门做摄像头,有些⼚商专门做DVS,有些⼚商则可能专门做平台等,然后通过集成商进⾏集成,提供给最终客户。
这种产业合作模式,已经迫切的需要⾏业提供越来越标准化的接⼝平台。
ONVIF规范描述了⽹络视频的模型、接⼝、数据类型以及数据交互的模式。
并复⽤了⼀些现有的标准,如WS系列标准等。
ONVIF规范的⽬标是实现⼀个⽹络视频框架协议,使不同⼚商所⽣产的⽹络视频产品(包括摄录前端、录像设备等)完全互通。
ONVIF规范中设备管理和控制部分所定义的接⼝均以Web Services的形式提供,设备作为服务提供者为服务端。
激光一体化智能高速云台安装和使用手册V:1.0型号:RJ-IPE10-36X在使用本产品之前,敬请您仔细阅读使用手册香港雷杰科技发展有限公司联系人:梁小姐电话:00852-65252550 传真:0086-755-25852272MSN:*********************Skype: jackieliangcn Yahoo: jackielcnE-mail: *******************公司网站:一、注意事项1.在安装使用本产品之前,首先请仔细阅读本说明书。
2.本产品电源有AC24V输入方式,具体接线方式参考说明文档。
3. 内部为精密光学及电子元器件,在运输保管及安装过程中要防止重压、剧烈震动等不正确的操作方法,否则可能对产品造成损坏。
4.请不要自行拆卸产品内部器件,以免影响使用,里面没有用户自行维修的零件。
5.使用中必须遵守各项电气安全标准,配用本机自带的专用电源。
RS-485控制信号及视频信号在传输过程中应与高压设备或电缆保持足够的距离,必要时还要做好防雷击、防浪涌等防护措施。
6.不要在超出限定的温度、湿度或电源规格的状态下使用本产品。
7.不管摄像机电源是否接通,不要将摄像机瞄准太阳或极光亮的物体,不要将摄像机长时间瞄准或监视光亮的静止物体。
8.请勿在10米距离内将激光束直射于人眼,以免对眼睛造成伤害。
9.镜头上如果粘有尘灰,请使用专用镜头纸擦拭。
本产品是集高清晰度彩色摄像机、万向变速云台、激光照明、多功能解码器、字符叠加、报警输入/输出于一体的高科技监控产品。
最大限度地减少了系统部件之间的连接,提高了系统的可靠性。
同时也便于安装和维护,具有外形美观、轻巧灵便、操作简单等优点。
1.集成多协议解码器a. 内置解码器,集成多种协议,最多可集成9种通讯协议,通讯波特率可调,通过云台内部的简单拨码,即可与多种常用系统兼容,通用性极强。
b. RS485串行控制;云台地址1~1023。
监控行业通信协议应用最广的协议就是美国PELCO-P,PELCO-D协议,可以说国内大部分控制设备,包括嵌入式录像机,监控视频采集卡软件,各种控制键盘,PC机调试研究均有此协议。
其中通过各个行家又繁衍出各种版本。
此文讲解“正宗”的美国PELCO-P\D协议,最后也讲解一下最新版本及其他厂家的协议。
一、PELCO协议介绍1、PELCO协议据本人了解,有PELCO-P\D两种协议。
其中PELCO控制键盘与PELCO矩阵通信协议不在此文范围。
这里只讲PELCO主控与终端解码器通信协议。
2、PELCO主控与前端解码器是通过RS422\RS485通信格式传输,注意:以前不少菜鸟问我的设备是用RS485协议,这就是笑话了。
协议是指通信的内容,主控与接收约好的数据传输,类似合同,甲乙两方按约定的事项来办事。
3、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
4、PELCO协议内容包括云台控制命令,摄像机控制命令,辅助控制命令。
预置位设置和调用命令。
注意:网上PELC协议版本众多,建议看家选择英文版本,中文版本很多错误。
其中英文版本最后的例子有错,后面我会纠正!下面逐一介绍:二、PELCO协议内容介绍1、先讲PELCO-P协议:看上表:P协议一共8个字节,头字节是A0,第2个字节是地址00-31(一共32个地址),32个地址现在大系统已经不够用了,所以我们要更改它,可以改成00-63个地址,00-127个地址。
地址在软件里随便增加的。
设置自动工作计划当设备处于无人职守状态,希望系统根据预先设定的工作计划进行工作时,可通过设置[自动工作计划]来实现整个系统的运作。
自动工作计划是针对通道来进行设置的,所以每个通道根据具体环境进行个性化设置。
首先介绍几种基本工作类型:序 号 基本工作类型注释说明1 录象 只执行录象功能,不进行报警布/撤防2 丢失侦测 视频丢失触发报警3 运动侦测 物体运动触发报警录象,当灵敏度较高时,光线变化也会报警4 探头侦测 红外探头触发报警录象5XX 侦测+录象执行录象功能,同时布防相应的侦测类型自动工作计划设置注意事项: ➢如果不需要24小时录象,只需触发报警(包括运动侦测)后进行录象,那么在选择工作类型的时候,请不要选择类似“XXXX+录象”这种模式,它代表的意思就是全程录象,同时进行报警布/撤防。
你只需要选择“XX 侦测”即可。
➢ 工作计划时间的设置,由于系统没有“今天”和“明天”这种概念,所以在设置跨越当天的工作计划时,需要将当天拆分为两天进行设置:例如今天(周一)的晚上七点,到明天(周二)的早上6点设置视频运动侦测,那么设置时候应该设置为:周一 19:00:00 —— 23:59:59 运动侦测 周二 0:00:00 —— 07:00:00 运动侦测图3-24图3-25表3-5➢当设置完一个通道的一个星期的工作计划以后需要将该设置套用到其它通道时,选择将该通道的设置信息复制到其它通道,然后保存,选择确定退出。
设置完毕以后只要只要将主界面上的自动工作按扭设置为工作状态,然后将系统锁定即可(图3-25)。
自动工作计划执行中工作计划停止系统锁定系统未锁定图3-253.2.7 普通云台及快球设置⏹协议设置设置云台协议过程中,首先确认所选设备所使用的正确协议,配套波特率,所连接电脑的串口号,云台解码器地址(图3-26)。
在确认以上信息之后就可以设置了。
其中通道指的是视频通道,就是云台(快球)所代表的通道。
图3-26⏹快球预置位的设置添加完协议之后,开始对快球设置预置位。
云台命令集
1.数据格式
通讯格式:2400/4800bps,8位数据位,无奇偶校验位,1位停止位
数据连续不断发出,方式为:
128 128 (5ms) 128 128 128 ( 5ms) 128 128 128 (5ms) … …
在键盘没有发出指令时,键盘一直发出128 数据流;在键盘发出指令时,按以下方式发送指令:
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
XXX YYY ZZZ (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
2.云台控制命令
XXX代表解码器地址,计算方法是:
当解码器地址=0时:XXX=128
当解码器地址<256时:XXX=解码器地址
当解码器地址=256时:XXX=128,此时ZZZ>63
当解码器地址>256时:XXX=解码器地址-256,此时ZZZ>63
ZZZ计算方法是:
当解码器地址<256时:ZZZ=15、31、63等
当解码器地址>=256时:ZZZ=64、75、95等
YYY代表云台命令:上(136)、下(138)、左(145)、右(129)
向右上运动时,如下所示:
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
XXX 129 ZZZ (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
XXX 136 ZZZ (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
128 128 (5ms) 128 128 128 (5ms) 128 128 128 (5ms)
3.镜头控制命令
XXX代表解码器地址,ZZZ代表监视器地址,计算方法是:
当解码器地址=0时:XXX=128 ZZZ=监视器地址
当解码器地址<256时:XXX=解码器地址ZZZ=监视器地址
当解码器地址=256时:XXX=128,此时ZZZ=监视器地址+63
当解码器地址>256时:XXX=解码器地址-256,此时ZZZ=监视器地址+63
YYY代表镜头命令。