后向轨迹模型原理
- 格式:doc
- 大小:12.22 KB
- 文档页数:1
倒车轨迹原理
倒车轨迹原理是指汽车倒车时,车轮和车身的运动轨迹。
在倒车过程中,为了保证安全,驾驶员需要时刻关注车身和车轮的位置,以避免碰撞或被卡住。
倒车轨迹原理主要由车轮和车身的运动轨迹组成。
当驾驶员将车挂入倒车档时,车轮会发生相反方向的旋转,向后推动车身。
此时,车身的运动轨迹将呈现出一个类似于“S”型的曲线。
当车轮开始旋转时,车头会先向一侧转动,然后再向另一侧转动。
这个过程中,车轮会在地面上留下一条弧形的痕迹。
随着车速的增加,车身的运动轨迹将变得越来越平滑。
倒车轨迹原理对驾驶员非常重要。
在倒车时,驾驶员需要时刻注意车身和车轮的位置,以避免碰撞或被卡住。
此外,驾驶员还需要了解车身和车轮的运动轨迹,以便更好地控制汽车的移动。
总之,了解倒车轨迹原理对驾驶员来说非常重要。
只有掌握了这个原理,才能更好地倒车,避免事故的发生。
- 1 -。
车转弯轨迹原理及转弯中心1.引言1.1 概述车辆转弯是我们日常生活中常见的交通行为之一,车辆在转弯时会按照一定的轨迹行驶。
那么,车辆转弯轨迹的形成原理是什么呢?本文将探讨车辆转弯轨迹的基本原理以及转弯中心的概念及其影响因素。
在我们驾驶车辆过程中,当需要改变行驶方向时,我们通常选择转动方向盘。
这一简单的动作会引起车辆的转弯,但车辆并非立即朝着新的方向行驶,而是经过一段曲线轨迹后才完成转弯。
这种曲线轨迹的形成是由车辆在转弯时的力学原理所决定的。
车辆转弯时,转弯部分的轮胎与地面产生了一定的摩擦力,而这个摩擦力将会产生一个向内的力矩作用在车辆上。
根据牛顿第二定律,该力矩将导致车辆产生一个向内的角加速度,进而改变车辆的转向。
同时,车辆在转弯时也会受到惯性的作用。
由于车辆的质量具有一定的惯性,当转弯时,车辆的惯性会使车身有一种继续直行的趋势。
为了保持平衡,车辆需要通过转弯轨迹来克服这种惯性。
转弯中心是车辆转弯轨迹的重要概念,它是描述车辆转弯运动过程中的一个关键点。
转弯中心指的是车辆转弯时所绕的一个虚拟点,在该点上车辆没有发生横向移动。
转弯中心的位置受到多种因素的影响,比如车辆的轴距、车辆的速度以及转弯时的半径等等。
这些因素都会对转弯中心的位置产生一定的影响。
通过对车辆转弯轨迹原理及转弯中心的探讨,我们可以更好地理解车辆转弯过程中所涉及的力学原理,并能够更加科学地进行驾驶操作。
同时,对转弯中心的重要性进行讨论,有助于我们在实际驾驶过程中更好地把握车辆的操控,提高行驶的安全性和稳定性。
在接下来的正文中,我们将详细探讨车辆转弯的基本原理以及转弯中心的概念及其影响因素。
通过对这些内容的深入理解,我们能够更好地应对各种驾驶场景,更加安全、稳定地完成转弯操作。
1.2 文章结构文章结构部分的内容应该包括本文的主要章节和每个章节的概述。
在本文中,我们将介绍车辆转弯轨迹原理及转弯中心的相关概念。
文章结构如下:2.正文2.1 车辆转弯的基本原理在本节中,我们将讨论车辆在转弯时所遵循的基本物理原理。
利用FY-2E红外和水汽波段对强对流云团的识别和演变研究肖笑;魏鸣【摘要】In this study,the time sequential images of the FY-2E VISSR(Visible and Infrared Spin Scan Radiometer) IR(Infrared) and WV (Water Vapor) bands are used to recognize and short-time forecast deep convective clouds.In many researches regarding the distinguishing of deep convective clouds from cirrus clouds,the BT (Brightness Temperature) threshold technique is a frequently applied method,of which the defect lies in its variance with time and space,rendering it difficult to find a proper threshold to all weather conditions.The fact that water vapor has strong absorption in the location of the WV band along with the vertical distribution of water vapor in the atmosphere makes it difficult for satellites to receive the radiation emitted at the WV band by clouds under the height of around 400 hPa and at ground,while the satellite detected energy of the IR band mainly originates from the middle-low level of atmosphere.With the aid of disparity in the radiation source,the increase in optical depth of high-level clouds leads to a gradual change in the distribution pattern of pixels of satellite images in IR-WV spectral space,which is invulnerable to time and space,in contrast to the BT threshold technique.In the present study,pixels are identified as deep convective clouds if the fitted slope of their IR and WV BT is greater than a given threshold.The backward trajectory method is used to predict the location and shape of the detected cloud in future hours.The motionvector field of the target area is retrieved using the cross-correlation method from two neighbouring images,with a time resolution of 30 minutes.The detection and forecast methods are applied to an MCC (Mesoscale Convective Complex) which occurred in southeastern China,and the evolution of the MCC during its entire lifecycle is obtained by the analysis of its cloud top TBB (Temperature of BlackBody)distribution.The results show that the detection algorithm in this article,compared to other methods using IR data only,functions more effectively in discriminating thin cirrus from intense convective clouds,as well as in detecting convective clouds with lower height.The forecast approach performs well in a short time range,and the results are more accurate for clouds with large spatial dimensions than small ones.%使用FY-2E静止气象卫星的红外1(10.3~11.3 μm)和水汽波段(6.3~7.6μm)时序图像,对强对流云进行识别和短时预测.亮温阈值法是将强对流云和其他高云区分开的常用方法,但是合适的亮温阈值是随着时间和空间而变化的,过高的阈值会将许多卷云包括进来,太低的阈值会排除掉云顶发展还不是很高的强对流云.水汽波段所在的位置是水汽的一个强吸收带,而高度在400 hPa上下的大气层是水汽波段的一个强吸收层,大气在垂直方向上的对水汽波段辐射吸收的分布模式使得卫星接收到的水汽波段辐射主要来自于400 hPa以上的大气中高层,而卫星接收到的红外波段辐射主要来自于大气中低层,两个波段间辐射来源的差异使得不同光学厚度的高云的辐射观测值在红外—水汽光谱空间中的分布具有明显差别,并且这种差异具有时空的稳定性.本文将一定范围内的云团的象元测值在红外—水汽光谱空间中的分布的拟合直线斜率作为强对流云识别的依据,结果表明相对于亮温阈值法,本文的识别方法不仅能够较好地区别卷云和强对流云,同时也能更有效地识别未达到旺盛阶段的对流云.在对强对流云进行识别后,根据相邻时间段的卫星图像,利用交叉相关法反演得到强对流云团顶部的位移矢量场,并根据后向轨迹法对强对流云团位置形状进行短时预测,预报结果在短时间内(0~1 h)较好,并且对面积较大的云团的预报效果要优于较小的对流云团.此外文中还利用逐半小时的云顶黑体温度(Temperature of Black Body,TBB)资料分析了云顶亮温的分布变化,得到了整个强对流过程的演变特征.【期刊名称】《大气科学学报》【年(卷),期】2018(041)001【总页数】10页(P135-144)【关键词】FY-2E;强对流云;水汽波段;云顶黑体温度;交叉相关法【作者】肖笑;魏鸣【作者单位】南京信息工程大学气象灾害预报预警与评估协同创新中心,江苏南京210044;南京信息工程大学气象灾害预报预警与评估协同创新中心,江苏南京210044【正文语种】中文暴雨、冰雹、大风等由强对流系统所引发的灾害性天气给人民的生命安全和社会经济活动造成巨大危害,因此对强对流云团的分析和研究有着重要的意义。
后向轨迹模型原理轨迹模型是一种用于预测物体或者目标未来运动轨迹的模型。
它基于已有的运动数据和物体的运动特征,通过分析和建模来预测物体未来的位置和运动轨迹。
轨迹模型在许多领域都有广泛的应用,例如交通管理、人体行为分析、机器人导航等。
轨迹模型的原理主要包括两个方面:特征提取和轨迹预测。
特征提取是指从已有的运动数据中提取出物体的运动特征,例如速度、加速度、运动方向等。
这些特征可以通过各种传感器或者图像处理技术获取到。
轨迹预测是指根据提取到的特征,利用数学模型或者机器学习算法来预测物体未来的位置和运动轨迹。
在特征提取阶段,常用的方法包括位置差分、速度计算和加速度计算等。
位置差分是指计算物体在相邻两个时刻的位置变化,从而得到物体的运动方向和速度。
速度计算是指通过计算物体在单位时间内移动的距离,从而得到物体的瞬时速度。
加速度计算是指通过计算物体速度的变化率,从而得到物体的瞬时加速度。
在轨迹预测阶段,常用的方法包括线性模型、非线性模型和机器学习模型等。
线性模型是指基于物体的运动特征,利用线性方程来描述物体的运动轨迹。
非线性模型是指基于物体的运动特征,利用非线性方程来描述物体的运动轨迹。
机器学习模型是指利用已有的运动数据和物体的运动特征,通过训练模型来预测物体未来的位置和运动轨迹。
轨迹模型的性能主要取决于特征提取的准确性和轨迹预测的精度。
特征提取需要考虑到物体的运动特征是否能够准确地反映其运动状态,以及特征提取的方法是否能够对噪声和干扰进行有效的抑制。
轨迹预测需要考虑到模型的复杂度和适应性,以及模型的训练数据是否能够充分地覆盖物体的运动状态。
在实际应用中,轨迹模型可以用于交通管理,通过预测车辆的行驶轨迹来优化交通流量和减少交通拥堵。
它还可以用于人体行为分析,通过预测人体的运动轨迹来识别异常行为和提高安全性。
此外,轨迹模型还可以用于机器人导航,通过预测机器人的运动轨迹来规划路径和避免障碍物。
轨迹模型是一种用于预测物体或者目标未来运动轨迹的模型。
倒车轨迹原理一、引言倒车是驾驶员在停车、调头或者倒车入库等情况下的常见驾驶操作。
倒车轨迹原理是指在倒车操作中,车辆的轨迹是如何形成的,以及如何合理地控制车辆的轨迹,保证安全和顺利完成倒车操作。
本文将从倒车轨迹的形成原理、倒车轨迹的控制方法以及倒车轨迹的应用等方面进行探讨。
二、倒车轨迹的形成原理在进行倒车操作时,车辆的轨迹是由车辆的前轮和后轮的转动角度所决定的。
当驾驶员将方向盘向左转时,车辆的前轮会向左转动,车辆的前进方向也会向左偏离,形成一条曲线轨迹。
同样,当驾驶员将方向盘向右转时,车辆的前轮会向右转动,车辆的前进方向也会向右偏离,形成另一条曲线轨迹。
而车辆的后轮则会相对固定,根据前轮的转动角度来确定车辆的转弯半径和轨迹形状。
三、倒车轨迹的控制方法1. 角度控制:在倒车操作中,驾驶员可以通过方向盘的转动来控制车辆的转动角度。
合理地控制转动角度可以使车辆的转弯半径更小,轨迹更接近预期目标。
2. 转向控制:在倒车操作中,驾驶员可以通过踩刹车和松开刹车的方式来控制车辆的转向。
合理地控制转向可以使车辆的转弯半径更小,轨迹更接近预期目标。
3. 视觉控制:在倒车操作中,驾驶员需要通过后视镜和倒车影像等工具来观察车辆的位置和轨迹。
通过准确地观察车辆的位置和轨迹,驾驶员可以及时采取相应的控制措施,确保倒车操作的安全和顺利进行。
四、倒车轨迹的应用倒车轨迹的应用非常广泛,不仅应用于日常驾驶中的停车和调头等操作,还广泛应用于工业机械和自动驾驶等领域。
在工业机械中,倒车轨迹的控制可以使机械设备更加精确地进行倒车操作,提高工作效率和安全性。
在自动驾驶领域,倒车轨迹的控制可以使自动驾驶车辆更加准确地进行倒车操作,提高行驶的安全性和稳定性。
五、总结倒车轨迹的形成原理是由车辆的前轮和后轮的转动角度所决定的,驾驶员可以通过角度控制、转向控制和视觉控制等方法来控制车辆的轨迹。
倒车轨迹的应用广泛,不仅应用于日常驾驶中的停车和调头等操作,还应用于工业机械和自动驾驶等领域。
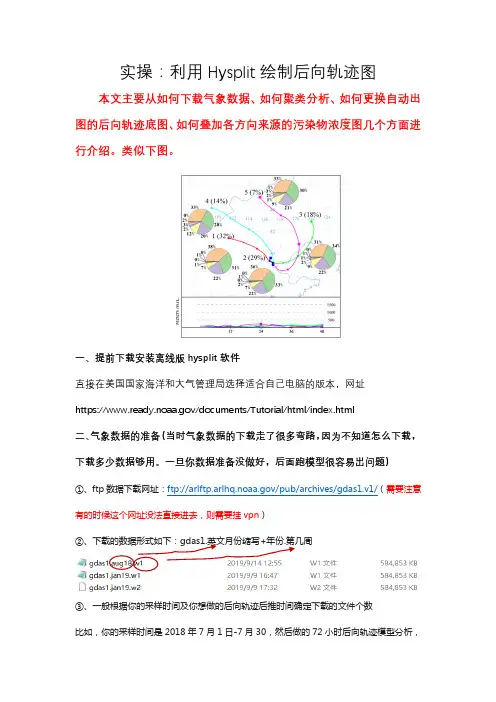
实操:利用Hysplit绘制后向轨迹图本文主要从如何下载气象数据、如何聚类分析、如何更换自动出图的后向轨迹底图、如何叠加各方向来源的污染物浓度图几个方面进行介绍。
类似下图。
一、提前下载安装离线版hysplit软件直接在美国国家海洋和大气管理局选择适合自己电脑的版本,网址https:///documents/Tutorial/html/index.html二、气象数据的准备(当时气象数据的下载走了很多弯路,因为不知道怎么下载,下载多少数据够用。
一旦你数据准备没做好,后面跑模型很容易出问题)①、ftp数据下载网址:ftp:///pub/archives/gdas1.v1/(需要注意有的时候这个网址没法直接进去,则需要挂vpn)③、一般根据你的采样时间及你想做的后向轨迹后推时间确定下载的文件个数比如,你的采样时间是2018年7月1日-7月30,然后做的72小时后向轨迹模型分析,2018年7月1日后推三天的时间是6月28,所以你下载数据的时候,起始文件应该是2018年6月28所在周的文件,即gdas1.jun18.w5,同理可以得到结束文件是gdas1.jul18.w4(为了使得运行更顺利,一般可以在起始文件和结束文件前、后再多下载一个周的数据文件),所以我们需要下载的数据文件有:gdas1.jun18.w4,gdas1.jun18.w5,gdas1.jul18.w1,gdas1.jul18.w2,gdas1.jul18.w3,gdas1.jul18.w4,gdas1.jul18.w5三、按所需时间段批量计算后退气流轨迹①、初始参数设置:打开Hysplit主界面->“Trajectory"->“Setup Run”②、参数设置:(1)starting time(采样开始时间):按年月日小时的顺序输入起始时间,注意空格。
(2)起始位置的数量:一般填1,同时点击右侧的Setup starting location,填写坐标经纬度以及起始高度,(经纬度用小数表示,高度用100、500、1000)。

专题01 曲线运动中的轨迹模型1.曲线运动运动轨迹是曲线的运动称为曲线运动。
2.曲线运动的速度方向:曲线运动中某时刻的速度方向就是该相应位置点的切线方向。
3.曲线运动的轨迹与速度、合力的关系做曲线运动的物体的轨迹与速度方向相切,夹在速度方向与合力方向之间。
并向合力方向弯曲,也就是合力指向运动轨迹的凹侧。
【特别提示】速度方向、合力方向及运动轨迹三者的关系(1)根据速度和合力的方向,可定性画出物体的运动轨迹,如图甲所示。
(2)根据物体的运动轨迹,可确定物体在某点的速度方向,也可定性画出受力方向,如图乙所示。
4.合外力与速率变化的关系若合力方向与速度方向的夹角为α,则:甲乙丙【模型演练1】翻滚过山车是大型游乐园里的一种比较刺激的娱乐项目。
如图所示,翻滚过山车(可看成质点)从高处冲下,过M点时速度方向如图所示,在圆形轨道内经过A、B、C三点。
下列说法中正确的是()A.过A点时的速度方向沿AB方向B.过B点时的速度方向沿水平方向C.过A、C两点时的速度方向相同D.在圆形轨道上与过M点时速度方向相同的点在AB段上【思路点拨】过山车做曲线运动,在任一位置的速度方向沿轨迹上该点的切线方向。
【答案】B【解析】翻滚过山车经过A、B、C三点的速度方向如图所示,由图可判断出B正确,A、C错误;翻滚过山车在圆形轨道AB段上的速度方向偏向左上方,不可能与过M点时速度方向相同,D错误。
【规律总结】在确定某点的速度方向时,要弄清两点:一是物体沿轨迹的运动方向,二是轨迹在该点的切线方向。
然后两方面结合确定该点的速度方向。
【模型演练2】(2023·全国·统考高考真题)小车在水平地面上沿轨道从左向右运动,动能一直增加。
如果用带箭头的线段表示小车在轨道上相应位置处所受合力,下列四幅图可能正确的是()A.B.C.D.【答案】D【模型演练3】(2023上·山东潍坊·高一统考期中)如图所示为某一物块在恒力作用下运动的轨迹。
2020年12月第23期总第465期November2020No.23TotalNo.465内蒙古科技与经济Inner Mongolia Science Technology&Economy基于HYSPLIT后向轨迹订正污染物浓度的霾预报方法郭佰汇,王优,孙嘉骏,于芳健,王晓霞,刘鹏飞,冯雪菲(朝阳市气象局,辽宁朝阳122000)摘要:选用2014年〜2017年辽宁朝阳站气象要素资料与PM2.5数据'艮据最新霾预报预警标准确定霾日,利用Spearman,Pearson和Kendalls Tau一b三种相关对PM2.5日差与气象要素以及气象要素间作了相关性检验,确定了PM2.5日差方程影响因子;利用逐步回归分析建立PM2.5日差方程,结合过去一日PM2.5值作出PM2.5预报方程;利用PM2.5预报方程对2017年1月〜10月的朝阳地区的PM2.5值进行了预报,检验得出此预报方法的PM2.5浓度预报准确率为60.5%,霾日预报准确率为84.82%;利用HYSPLIT后项轨迹模拟出的污染物路径和沉降对2014年〜2016年间霾天气进行了分型'艮据总结得出的6类路径和5类沉降类型的PM2.5预报方程误差,对2017年1〜10月间的PM2.5预报浓度进行订正'艮据路径订正的PM2.5预报效果最好,准确率提高2.7%'艮据路径和沉降共同订正的霾日预报效果最好,准确率提高了 3.5%&关键词:霾预报;逐步回归;HYSPLIT后向轨迹中图分类号:P427.2文献标识码:A文章编号1007—6921(2020)23—0070—04霾是指大量极细微的干尘粒等均匀地浮游在空中,使水平能见度小于10.0km的空气普遍浑浊现象(1)'关于霾的研究,郑秋萍⑵等指出霾日污染物浓度远大于非霾日,随着霾等级增大,黑炭浓度明显增大°薛莲⑶等对霾日和非霾日的大气污染物和PM1主要化学浓度水平及其日变化特征进行了研究,总体表现为霾日高于非霾日的特征°周丽⑷等运用统计分析和气象统计预报的方法,对影响大气污染的气象因子进行了综合分析,并分别建立了气溶胶PM2.5粒子浓度与气体污染物、气象要素场的两类统计相关拟合模型°陆忠艳(〜8)等用逐步回归、支持向量机等方法对霾的预报方法作了研究°因此,笔者旨在根据2014年〜2017年资料建立朝阳地区霾预报方法,为进一步提高霾天气预报水平打好坚实的基础'1资料和方法1.1资料来源文中气象资料选用2014年1月〜2017年10月国家基准观测站朝阳站的常规地面气象资料和MICAPS高空资料,PM2.5选用了环保部门朝阳地区八里堡、河畔小区、农业园区、西梁四个观测站的PM2.5平均值作为朝阳站的PM2.5值°12资料处理利用VN语言编进行双线性插值将格点数据转化为站点数据,读取MICAPS高空资料中08和20时次的700hPa风速、700hPa〜850hPa温度露点差、850hPa〜925hPa温度、925hPa〜850hPa垂直速度等资料'1.3技术方法13.1霾天气统计标准°根据辽气办发2015(207号)文中霾预报等级划分标准,当24h满足此标准时则记为有霾日,标准如表1(PM2.5浓度为预报时效内平均值)°表1霾预报等级划分标准等级相对湿度(%)能见度(km)PM2.5浓度(Cg/m3)轻度霾'903%vis'5且75'PM2.5<115中度霾'902%vis'3或115<PM25%150重度霾'901%vis'2或150<PM25%250严重霾'90Qis'1或PM25>250同时结合《辽宁省气象局环境气象业务工作方案》霾预警信号发布标准,预计未来12h内能见度小于5 000m,相对湿度小于90%PM2.5平均浓度大于150^g・m&并将持续6h及以上时,则同样记为有霾日’13.2相关性检验°Pearson相关系数用来衡量两个数据集合是否在一条线上面,它用来衡量定距变量间的线性关系°Spearman相关系数利用两变量的秩次大小作线性相关分析,对原始变量的分布不作要求,属于非参数统计方法,适用范围要广些°Kendalls Tau—b相关系数用于反映分类变量相关性的指标,适用于两个分类变量均为有序分类的情况°为更好地对PM2.5和各气象要素的相关性进行检验,文中选用Spearman?Pearson和Kendalls Tau $b三种相关性检验方法对因子进行精选'1.3.3逐步回归'逐步回归是一种线性回归模型自变量选择方法,它将偏回归平方和经验是显著的变量逐个引入模型,对已入选回归模型的变量逐个收稿日期!020—07—14作者简介:郭佰汇(1989—),吉林白山人,大学本科,中级工程师,主要研究方向:气象、农业郭佰汇,等・基于HYSPLIT后向轨迹订正污染物浓度的霾预报方法2020年第23期进行检验,将检验认为不显著的变量删除,以保证所得自变量子集中每一个变量都是显著的,此过程经过若干步直到不能再引入新变量为止笔者采用SAS软件对PM2.5日差与各气象要素进行逐步回归模型分析°1 3.4HYSPLIT模型°HYSPLIT模型是一种用于计算和分析大气污染物输送、扩散轨迹的专业模型,主要有2种形式:后向传输模型和前向扩散模型°其中,后向模拟是模拟目标地区的气流流向的另一种形式,主要用来解释目标地区气体或者颗粒污染物是由于什么来源造成的影响,是用来解释源的问题(011)'笔者即是采用HYSPLIT后项轨迹模拟污染物路径和沉降来对PM2.5预报结果进行订正以实现朝阳地区霾预报方法°2结果与讨论2.1霾天气变化趋势根据辽宁省气象部门结合PM2.5浓度的最新霾天气预报预警划分标准,统计得出2014年〜2016年3年间朝阳地区出现的95个霾日,霾日数月变化情况如图1°月备图1辽宁朝阳地区霾天气月变化趋势2.2PM2.5日差预报方程建立2.2.1因子初选因子的选择是影响预报模型准确性的一个重要因素°张宝贵(12〜⑷等都对霾与气象要素之间的统计关系进行了研究,指出霾天气与能见度、相对湿度、风、气压、等气象要素密切相关°先对因子进行初选,以日常进行霾天气预报的经验为依据,选择霾预报时会考虑到的各气象要素#主要包括以下几类:①地面物理量:24h降水(R24)、最高温度(Tg)、14h 露点温度(Tdl4)、05h气压(P05)、相对湿度(RH14))等;②地面物理量24h变量:14h温度24h 变量(△T14)、14时气压24h变量(DP14)等;③地面物理量平均量:平均能见度的倒数(VIS)、平均相对湿度(RH)、平均总云量(ZY)等;④高空物理量:08h700hPa风速(08—q700)、08h700hPa风速24h 变量(08—△v700)、08h850hPa温度露点差(08—t—td850)、20h925—850hPa温度差(20—T925—850)、20h925hPa垂直速度(20—ome925)等°共初选出42个物理量作为建立PM2.5日差(文中用D PM2.5表示)与气象要素相关关系的因子°2.2.2因子精选2.2.2.1DPM2.5与各气象要素的相关性检验°完成因子初选后进行因子的精选,通过计算初选因子与预报对象之间的线性相关系数,挑选相关系数的绝对值较大的各物理量为入选因子,入选因子要通过信度为0.05的相关检验,才能作为精选因子,最后建立预报模型°根据3种相关性检验方法#十算得DPM2.5与各要素之间的相关性,对各检验方法得出的检验统计量进行分析?Spearman和Kendalls Tau一b检验方法在)PM2.5相关性检验表现一致.Pearson相关性检验略有不同,3种检验方法筛选出检验统计量V 0.05的要素共有19个°2222各要素间相关性检验°对建立多元回归方程的因子选取时,若因子间有较强的相关性,会影响方程的准确性°因此对筛选出的19个气象要素两两进行相关性检验,排除要素间相关性过强对预报方程的影响’结果表明:D T14和T14、D P14和P14、△Tdl4和Tdl4、FS10m和FS14、08—t—td850和08一t一td700、20—D T850和08一D T850、20—ome850和20—ome925两两间的检验统计量V0”001,具有显著的相关性,由于检验统计量越小相关性越强,因此在剔除以上气象要素中检验统计量相对大的要素T14、P14、Tdl4、FS14、08—t—td700、20—D T850、20—ome925°VIS与FS10m、D T14等多个气象要素也具有一定的相关性#但考虑到能见度在霾天气预报中的重要影响,暂不将VIS其剔除°2.2. 2.3PM.日差预报因子确定°通过以上△P M2.5与各要素之间的相关性检验和各要素之间的相关性检验结果,按照相关性检验的原理,检验统计量越小,相关性越好;在多元回归方程中,相关性强的因子不同时出现在方程中,因此在相关性强的因子中筛选出其中与△PM25相关性最好用来建立方程,最终确定建立D PM2.5的12个气象要素VIS、FS10m、R24、D T14、D P14、D Tdl4、RH05、DY14、08一Dv700、08—t一td850、08—D T850、20—ome850°2.2.3PM2.5日差预报方程建立根据3种相关确定的气象要素因子建立多元线性回归方程°利用逐步回归的方法,将因子一个个引入,引入因子的条件是该因子的方差贡献是显著的°同时,每引入一个新因子后,按能通过0.05的显著性F检验的标准对老因子逐个检验,将方差贡献变为不显著的因子剔除,得到D PM2.5与各气象要素的多元相关相关关系,见表2°表2D PM2.5与各要素多元相关关系气象要素及常数项相关系数检验统计量方程总体检验统计量常数项10.29180.0061FS10m—3.344520.0098△T14 1.14266V.0001V.0001△Tdl4 1.67644V.0001DY14—0.406830.132308—△T8500.209760.0259总第465期内蒙古科技与经济经逐步回归建立,DPM 2.5与影响气象要素的多 元相关关系可见,DPM 24建立方程总体检验统计量 <0. 05,因此方程具有显著性意义,且历年历史数据对多元线性方程的距离残差均<0. 5,可以认为数据 中没有极端点°根据D PM 24与影响气象要素的多元相关关系,如表3所示,建立D PM 24与各气象要素的相关关系 方程如下:A PM 2.5 =10. 2118 — 3. 34452XFS10m +1. 14266 X D T14 + 1. 67644 X A Tdl4 — 0. 40683 X DY14 + 040176X08 — D T850。
2020年10月21—22日济南一次沙尘天气过程分析徐 媛32282部队,山东济南 250000摘要 主要采取气象探测资料对2020年10月21—22日济南一次沙尘天气过程进行分析。
结果表明:此次出现在济南的沙尘天气是由蒙古国中南部沙尘气溶胶持续南下造成的。
此次沙尘天气发生的主要影响系统是冷锋,地面冷锋过境,源于蒙古国南部一带的沙尘不断朝着东部和南部发展,途经区域PM10浓度值大幅升高。
由后向轨迹模式进行分析获悉,此次沙尘天气期间传输通道以西北路为主,并且后向轨迹模拟不同高度的气团传输路径和实况天气形势大体上一致。
关键词 济南;沙尘天气;天气形势;传输路径中图分类号:X513 文献标识码:B 文章编号:2095–3305(2023)08–0217-03沙尘天气是我国北方地区发生概率很高的一类灾害性天气[1]。
沙尘天气的出现不仅会加剧土地荒漠化、影响空气质量,还会导致能见度急剧下降,影响交通运输安全[2-3]。
因此,沙尘天气成为气象学者们研究的重要课题。
近年来,我国许多学者对大风沙尘天气的成因、机理展开了诸多研究,得出了许多研究成果。
例如:马素艳等学者[4]分析了2011年5月11日内蒙古地区一次强沙尘暴天气过程,认为此次强沙尘暴天气是由冷涡、强锋区、蒙古气旋、冷锋等天气系统共同造成的。
闵月等[5]分析了2015年4月27日北疆沿天山一带的沙尘暴天气过程,认为乌拉尔山低槽分裂短波槽与中纬度锋区上中亚低槽汇合东移是沙尘暴发生的影响系统,地面冷锋过境是沙尘暴出现的直接原因,水平风速增大和局地上升运动的共同作用加大了空气的扰动和流动,促进了沙尘暴的产生。
姬菲菲等[6]从天气学成因、动力机制等方面对2013年宁夏春季的一次大风、沙尘天气过程展开分析,发现该大风沙尘天气是受高压脊前西北气流影响,地面冷锋和冷高压移动过境所致的,而中高层的强冷平流也是影响此次大风沙尘暴的重要因素之一。
宝乐尔[7]通过对阿拉善盟2019年春季一次风沙天气过程进行分析发现,此次天气过程主要是700 hPa大气斜压性作用、500 hPa冷平流触发作用、高空动量下传作用、锋生作用、变压梯度等各方面因素共同造成的。
后向轨迹模型原理轨迹模型是一种用于预测或分析物体、人或事件运动轨迹的模型。
它基于各种数据源,如传感器数据、历史轨迹数据等,通过算法和模型进行分析和预测。
轨迹模型在许多领域都有广泛的应用,如交通管理、物流规划、人员追踪等。
本文将以人类的视角,以自然流畅的方式,介绍轨迹模型的原理和应用。
轨迹模型的原理基于物体或人的运动特征和环境条件。
通过收集和分析相关数据,可以得到一系列的轨迹数据点。
这些轨迹数据点可以包括位置坐标、速度、加速度等信息。
轨迹模型的目标是根据已知的轨迹数据,预测未来的轨迹或分析过去的轨迹。
为了实现这个目标,轨迹模型通常使用一些基本的算法和技术,如线性回归、最小二乘法、卡尔曼滤波等。
在交通管理领域,轨迹模型可以应用于交通流量预测、路线规划和交通事故分析等方面。
通过收集车辆的轨迹数据,可以分析交通拥堵的原因和程度,进而优化交通路线和减少交通事故的发生。
在物流规划中,轨迹模型可以帮助优化物流路径和运输计划,提高物流效率和降低成本。
在人员追踪领域,轨迹模型可以用于实时监测和追踪人员的位置和移动轨迹,提供安全保障和紧急救援。
除了上述应用领域,轨迹模型还可以应用于其他领域,如航空航天、气象预测、环境监测等。
在航空航天领域,轨迹模型可以用于卫星和飞机的轨迹预测和控制。
在气象预测中,轨迹模型可以分析大气层的流动和演变,提供气象预报和灾害预警。
在环境监测中,轨迹模型可以分析污染物的扩散和传播路径,为环境保护和治理提供科学依据。
轨迹模型是一种用于预测和分析物体、人或事件运动轨迹的模型。
它通过收集和分析相关数据,利用算法和技术进行轨迹预测和分析。
轨迹模型在交通管理、物流规划、人员追踪等领域有广泛的应用。
在未来,随着技术的进一步发展和数据的不断积累,轨迹模型将发挥更大的作用,为各个领域提供更精确和有效的解决方案。
后向轨迹模型原理
后向轨迹模型是一种基于马尔科夫决策过程理论的建模方法,用于研究决策问题。
该模型考虑了决策过程中的时间序列性质以及不确定性因素,可以用于预测未来决策的结果。
后向轨迹模型基于反向递归的方式,倒推出每一步决策的最优决策路径。
具体来说,该模型将决策过程分为若干个时间段,每个时间段内有若干个决策可选。
在每个时间段,模型计算每种决策的预期收益,并选取最优决策。
通过不断倒推,可以得到最终的最优决策路径。
后向轨迹模型的建模过程需要确定状态空间、决策空间、收益函数和转移概率。
在状态空间中,需要考虑所有可能的状态,包括初始状态和所有可能的中间状态。
在决策空间中,需要考虑所有可能的决策选项。
收益函数用于评估每种决策的结果,通常是某种效用函数或成本函数。
转移概率用于描述状态之间的转移概率,通常是一个条件概率。
后向轨迹模型在实际应用中被广泛用于各种决策问题,包括金融、医疗、工程等领域。
该模型可以优化决策过程,提高决策的准确性和效率。
- 1 -。