基于CAN总线的两余度舵机控制系统设计
- 格式:pdf
- 大小:310.26 KB
- 文档页数:4
基于通道控制的双余度DSP设计与实现
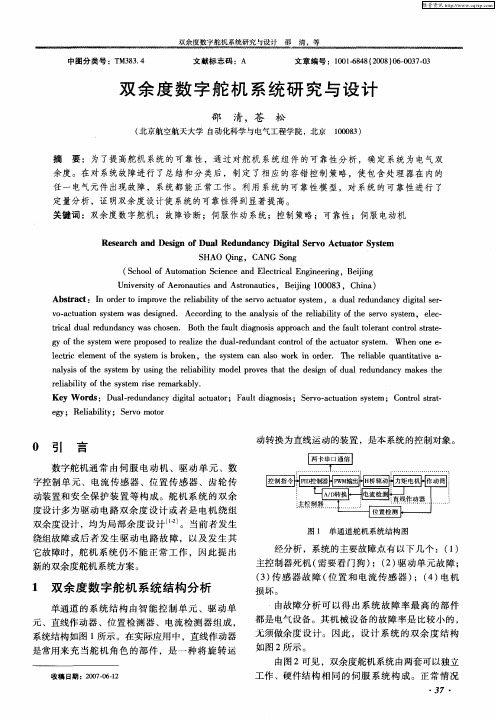
在双机交互的切换问题中,起主要作用的是通道的切换,当前打开的通道具有最高优先权,不管产生DSP切换的原因是什么,其最终的结果都将是当前只有一个通道是打开的,通道的切换可能是由主DSP程序主动控制而切换,或是控制逻辑本身的硬件原因,但是只有这个对应的打开通道的DSP能真正控制外部的输出,这即所谓的通道分用。
切换依据如图5所示。
系统应用控制软件主要实现系统的具体的应用功能,主要由以下功能子程序组成:系统自检子程序、双机交互及故障判断切换子程序、控制应用功能子程序等。
其中主DSP、辅DSP双机交互软件流程如图6a、图6b所示。
结语双余度DSP系统在对控制器要求较高的场合具有很好的实用意义,其基于通道复用的硬件设计结构简单且易于实现,有效地解决了双机共同工作的权限问题。
本设计中所提出的双余度DSP设计可以很方便地移植到其他的双余度系统中。
本篇文章共2页,此页为末页首页。
基于CAN总线的船舶自动舵监控报警系统设计作者:周韬张显库李博来源:《现代电子技术》2019年第16期摘; 要:为了减少船舶驾驶人员使用自动舵设备航行时引发的事故,并且方便船舶相关人员查看相关故障信息。
以Visual Basic为编程语言,采用双CAN总线通信、串口通信,设计能实时监控自动舵信息并提供报警信息的系统,并详细说明该系统的构架、功能、信息传输接口和界面设计。
以某段航线为例,在该系统上进行仿真测试,结果表明,该系统能实时并且正确地显示航行信息,对超出安全阈值的信息能及时产生报警并且存入数据库。
该系统对减少船舶航行事故有很大帮助,对整体自动舵的安全使用很有意义。
关键词:自动舵; 监控报警系统; 显示航行信息; 仿真测试; 实时监控; 功能说明中图分类号: TN830.1⁃34; TP301.6; ; ; ; ; ; ; ; ; 文献标识码: A; ; ; ; ; ; ; ; ; 文章编号:1004⁃373X(2019)16⁃0117⁃050; 引; 言自动舵设备作为船舶驾驶台的重要组成部分,可以实现改变航向、航向保持、航迹保持等船舶航行功能,这些功能极大地减轻了船舶驾驶员的负担。
随着船舶航运的发展,大型商船越来越离不开自动舵设备的使用。
自动舵设备的普及,减轻了船员的工作强度,节省了燃油,在正常使用的情况下船舶可以更快地到达目的港。
然而,据悉,海难事故大多是人为产生的[1],在船舶安装有自动舵设备后仍然会产生船舶碰撞、搁浅、上滩等事故。
由此可知,很有必要设置自动舵监控报警系统,以实时监控船舶的狀态,并且对故障进行报警和定位。
远洋船舶远程监控系统是船上人员与陆地端的船舶公司信息沟通的重要工具。
为了满足陆地端公司对远洋船舶更有效的监控,崔文彬等应用BP神经网络对船舶机舱监控系统进行改进[2]。
船舶日益现代化、智能化与快节奏营运,船舶的监控和管理是发展的趋势,船舶机舱远程在线监控可以减少事故的发生,但是机舱数据繁多,不易管理,孟维明等提出统一化分类的方法,为机舱数据标准化奠定了基础[3]。
专利名称:基于CAN总线结构的直升机串联舵机控制系统及控制方法
专利类型:发明专利
发明人:赵轩,莫胜波,金海俊,魏婧玲,魏启明
申请号:CN202011572575.2
申请日:20201225
公开号:CN112684743A
公开日:
20210420
专利内容由知识产权出版社提供
摘要:本发明属于航空技术领域,涉及一种基于CAN总线结构的直升机串联舵机控制系统及控制方法,在星型物理分布的CAN总线设备中,以接线模块为中心,节点设备通过电缆与接线模块连接,飞控计算机、串联舵机作为节点设备组成CAN总线系统。
串联舵机控制系统双余度配置,主控通道失效的情况下可转入备份通道工作,提高系统的安全性和任务可靠性,飞控计算机是主节点,其它若干个串联舵机是次要节点,飞控计算机与串联舵机之间采用应答方式交换数据,串联舵机具有完整的自监控能力,并可通过CAN总线上报详细监控信息,可以根据直升机自动飞控系统的要求便捷的增减串联舵机的数量。
申请人:兰州飞行控制有限责任公司
地址:730070 甘肃省兰州市安宁西路688号
国籍:CN
代理机构:中国航空专利中心
代理人:杜永保
更多信息请下载全文后查看。
基于CAN总线的舵机控制系统设计
绳涛
【期刊名称】《现代电子技术》
【年(卷),期】2004(27)24
【摘要】主要介绍了一种基于CAN总线的舵机控制系统.系统以CAN总线作为通信方式,PWM控制信号通过硬件方式产生,具有结构简单、信号稳定和实时性强的特点.
【总页数】3页(P62-63,68)
【作者】绳涛
【作者单位】国防科技大学,机器人实验室,长沙,410073
【正文语种】中文
【中图分类】P336
【相关文献】
1.CAN总线技术研究与基于CAN总线的生命科学仪器硬件系统设计(上篇) [J], 张文超
2.CAN总线技术研究与基于CAN总线的生命科学仪器硬件系统设计(下篇) [J], 张文超
3.基于CAN总线的四路舵机控制器的研究 [J], 徐斐;安毓英;林晓春
4.基于CAN总线的两余度舵机控制系统设计 [J], 邓遵义;李辉;苏宝平;宁祎
5.基于线圈感应技术编码器的舵机控制系统设计 [J], 王零超;吴兴校;蔡华祥;唐杨因版权原因,仅展示原文概要,查看原文内容请购买。
总线双轴舵机原理
总线双轴舵机是一种常见的舵机类型,其工作原理相对简单,但却十分实用。
本文将介绍总线双轴舵机的原理、特点以及应用场景。
一、总线双轴舵机的工作原理
总线双轴舵机采用了总线通信协议,可以通过一个信号线同时控制多个舵机。
由于其具有双轴控制功能,可以实现水平方向和垂直方向的旋转控制。
总线双轴舵机的控制信号是一种脉宽调制信号,其脉宽的范围一般为500us到2500us。
其中,500us表示最小脉宽,2500us表示最大脉宽。
在信号周期内,脉宽的变化可以控制舵机的旋转角度。
二、总线双轴舵机的特点
1. 总线控制:总线双轴舵机可以通过一个信号线同时控制多个舵机,方便使用。
2. 双轴控制:总线双轴舵机具有水平方向和垂直方向的旋转控制功能,可以实现更多的运动控制场景。
3. 精度高:总线双轴舵机的控制信号是脉宽调制信号,可以实现较高的旋转精度。
4. 体积小:总线双轴舵机体积相对较小,可应用于小型机器人、玩具等场景。
三、总线双轴舵机的应用场景
1. 机械臂控制:总线双轴舵机可以实现机械臂的多轴控制,可以应用于装配、物料搬运等场景。
2. 摄像头控制:总线双轴舵机可以实现摄像头的水平和垂直方向的旋转控制,可用于安防监控、机器视觉等领域。
3. 小型机器人:总线双轴舵机体积小、精度高,可应用于小型机器人、玩具等场景。
总线双轴舵机具有总线控制、双轴控制、精度高、体积小等特点,可应用于机械臂控制、摄像头控制、小型机器人等场景。