自动控制原理状态空间法共78页
- 格式:ppt
- 大小:5.89 MB
- 文档页数:78
控制系统状态空间法控制系统状态空间法是现代控制理论中常用的一种方法,它描述了控制系统的动态行为,并通过状态变量来表示系统的内部状态。
在这篇文章中,我们将详细介绍控制系统状态空间法的基本概念、理论原理以及应用。
一、控制系统状态空间法的基本概念状态空间法是一种描述动态系统的方法,通过一组一阶微分方程来表示系统的动态行为。
在这个方法中,我们将控制系统看作是一个黑盒子,输入和输出之间的关系可以用状态方程和输出方程来描述。
1. 状态方程状态方程描述了系统的内部状态随时间的演化规律。
它是一个一阶微分方程组,通常用向量形式表示:ẋ(t) = Ax(t) + Bu(t)其中,x(t)表示系统的状态向量,A是状态转移矩阵,B是输入矩阵,u(t)是输入向量。
2. 输出方程输出方程描述了系统的输出与内部状态之间的关系。
它通常用线性方程表示:y(t) = Cx(t) + Du(t)其中,y(t)表示系统的输出向量,C是输出矩阵,D是直接传递矩阵。
3. 状态空间表示将状态方程和输出方程合并,可以得到系统的状态空间表示:ẋ(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)在状态空间表示中,状态向量x(t)包含了系统的所有内部状态信息,它决定了系统的行为和性能。
二、控制系统状态空间法的理论原理控制系统状态空间法基于线性时不变系统理论,通过分析系统的状态方程和输出方程,可以得到系统的稳定性、可控性和可观测性等性质。
1. 系统稳定性系统稳定性是判断系统是否能够在有限时间内达到稳定状态的重要指标。
对于线性时不变系统,当且仅当系统的所有状态变量都是稳定的,系统才是稳定的。
通过分析状态方程的特征值,可以判断系统的稳定性。
2. 系统可控性系统可控性表示是否可以通过选择合适的输入来控制系统的状态。
一个系统是可控的,当且仅当存在一组输入矩阵B的列向量线性组合可以使得系统的状态从任意初始条件变为目标状态。
通过分析状态转移矩阵的秩,可以判断系统的可控性。

状态空间方法与控制系统状态空间方法是现代控制理论中一种重要且广泛应用的方法。
它以状态变量为基础,将控制系统描述为一组微分或差分方程,通过对这组方程进行求解和分析,实现对控制系统行为的全面理解和精确控制。
本文将对状态空间方法与控制系统进行详细介绍和分析。
一、状态空间方法的基本原理状态空间方法是现代控制理论的核心方法之一,它基于系统的状态变量来描述和分析控制系统的动态行为。
在状态空间方法中,系统的状态由一组变量来表示,这些变量可以是物理量或逻辑变量,其个数与系统的自由度一致。
通过对状态变量的描述和分析,可以全面了解系统的行为,进而设计出合适的控制策略。
在状态空间方法中,系统的动态行为可以通过一组微分或差分方程来描述。
这组方程通常称为状态方程,它是由系统的物理模型或传递函数转化而来。
状态方程的一般形式为:【公式】其中x是系统的状态向量,u是输入向量,y是输出向量,A、B、C、D是系统的状态空间矩阵。
通过对状态方程进行求解和分析,可以得到系统的时间响应、频率响应等重要信息。
同时,状态空间方法还可以结合控制理论的相关概念和方法,如可控性、可观性、稳定性等,对系统进行全面而深入的分析。
二、状态空间方法的应用状态空间方法具有广泛的应用领域,包括控制系统设计、系统辨识、故障检测与诊断等。
以下将从几个方面介绍状态空间方法的具体应用。
2.1 控制系统设计状态空间方法为控制系统设计提供了基础和工具。
通过建立系统的状态方程,可以分析系统的稳定性、可控性和可观性等性质,并设计出合适的控制器。
其中,状态反馈控制是状态空间方法中常用且有效的控制策略之一。
通过对状态量的测量和反馈,可以实现对系统的精确控制。
2.2 系统辨识系统辨识是指通过一系列的试验或观测数据,从中提取出系统的数学模型,以便系统的建模和控制。
状态空间方法在系统辨识中起到重要作用。
通过对系统的输入-输出数据进行处理和分析,可以确定状态方程中的矩阵参数,进而建立系统的数学模型。
状态空间法
状态空间法:是现代控制理论中建立在状态变量描述基础上的对控制系统分析和综合的方法。
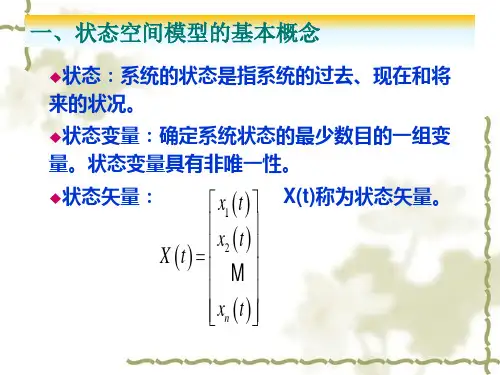
状态变量是能完全描述系统运动的一组变量。
如果系统的外输入为已知,那么由这组变量的现时值就能完全确定系统在未来各时刻的运动状态。
通过状态变量描述能建立系统内部状态变量与外部输入变量和输出变量之间的关系。
反映状态变量与输入变量间因果关系的数学描述称为状态方程,而输出变量与状态变量和输入变量间的变换关系则由量测方程来描述。
状态空间法的主要数学基础是线性代数。
在状态空间法中,广泛用向量来表示系统的各种变量组,其中包括状态向量、输入向量和输出向量。