PMAC多轴运动控制卡学习(硬件)
- 格式:docx
- 大小:1.41 MB
- 文档页数:30
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
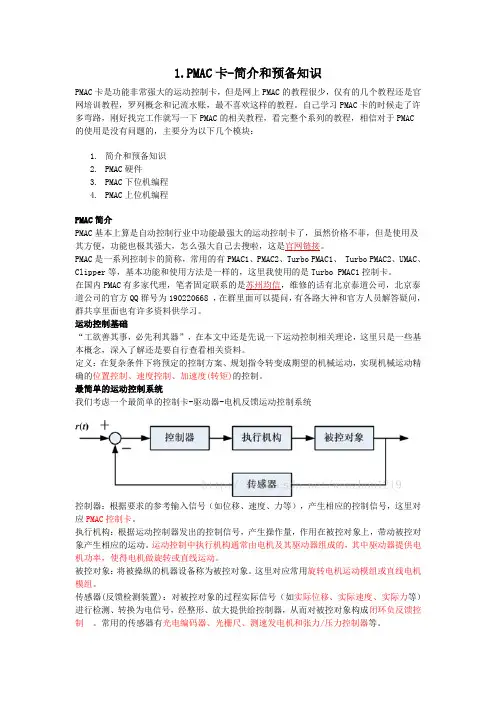
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
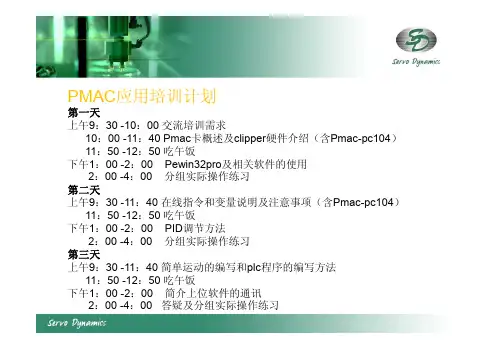
PMAC应用培训计划第一天 上午9:30 -10:00 交流培训需求 10:00 -11:40 Pmac卡概述及clipper硬件介绍(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 Pewin32pro及相关软件的使用 2:00 -4:00 分组实际操作练习 第二天 上午9:30 -11:40 在线指令和变量说明及注意事项(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 PID调节方法 2:00 -4:00 分组实际操作练习 第三天 上午9:30 -11:40 简单运动的编写和plc程序的编写方法 11:50 -12:50 吃午饭 下午1:00 -2:00 简介上位软件的通讯 2:00 -4:00 答疑及分组实际操作练习PMAC应用培训北京钧义志成科技发展有限公司PMAC多轴运动控制卡• PMAC的含义: • PMAC是program multiple axis controller 可编程的多轴运动控制卡。
• PMAC的特点: • PMAC卡是美国Deltatau公司的产品,是集 运动轴控制,和PLC控制以及数据采集的多 功能的运动控制产品。
PMAC卡1型和2型卡的主要区别• 1型卡 控制信号为模拟量,+-10V • 2型卡 控制信号为数字量,直接输出 PWM脉宽调制信号PMAC卡轴数类型• 2轴卡 PMAC MINI PCI MINI PMAC2 • 4轴卡 PMAC PCI Lite PMAC2 PCI Lite PMAC2A-104 • 8轴卡 PMAC PCI PMAC2 PCI PMAC2A-104+ACC1P • 32轴卡 Turbo PMAC PCI Turbo PMAC2 PCIPMAC新产品Clipper• 4轴 Clipper • 8轴 Clipper + Acc1P • 12轴 Clipper + Acc1P(2块)PMAC通讯方式类型• • • • PCI PC104 总线 USB 通讯 (PMAC2A-104 UMAC) 串口 通讯 RS422 或RS232 网卡通讯 ( PMAC2A-104 Clipper)ClipperTurbo PMAC2-Eth-Lite controllerTurbo PMAC Clipper 简介• Turbo PMAC Clipper是一个基于 TurboPMAC2 CPU功能齐全,结构紧凑, 成本的多轴控制器,标配以太网和RS232 通信接口和内置的I O. Clipper提供完整 TurboPMAC 2处理器,并提供最低配置4轴 伺服或步进控制32个数字I / O点。
基于PMAC运动控制卡的机器人控制软件研究PMAC运动控制卡是一款开放式可编程多轴运动控制器,利用PMAC运动控制卡的可编程多轴控制及开放的特性,对机器人实现控制系统软件的开发,可以在机器人的操作和控制上更为简便,功能模块化的设计方便用户对系统进一步开发和维护。
标签:机器人;PMAC;软件开发随着社会的发展,机器人的在各方面的运用更为普遍[1],机器人的控制功能更多,操作起来更容易。
在控制方面,如何更高准确完成对机器人的控制,更简单易懂的人机操作界面[2],达成更高效的机器人控制要求,这是在机器人开发的过程中急需解决的问题。
1.PMAC简介PMAC是由美国生产的一种开放式多轴运动控制器,其包含了运动控制、内部运算以及离散控制等基本功能,通过这些基本功能與上位机形成信息通讯,实现PMAC与PC的交互。
PMAC控制器的操作系统具有完全的开放性,内置了由Motorola公司提供的数字处理器DSP 56003。
它在处理信息方面的伺服更新率能达到普通控制器的5倍以上。
PMAC内部自带程序缓冲区和旋转缓冲区,适用于大程序的加工,并具有电子齿轮,随动功能及位置捕捉等功能。
2.运动控制系统研究的意义基于Windows平台开发控制软件可使用VC++作为开发工具。
VC++编程软件拥有强大的功能,在使用时灵活性强,具有很高的开发效率。
利用Visual C++6.0软件来进行控制软件的开发,在开发时可以灵活定制,不受硬件的干扰,不需要对硬件进行更改,只需改变软件的模块,从新定义它们的映射关系就可以软件功能实现更新替换。
采取这样的开发模式,不仅可以更高效快捷的完成功能的扩展,还可以利用到上位机更广泛的资源,循环利用,节省人力资源。
使用户开发出的产品拥有独特的功能特点,增加了自身的竞争力,从而达到控制器的潜力发挥最大化[3]。
3.运动控制系统的硬件结构控制系统的硬件结构由操作模块、运动控制模块以及机器人本体这三个部分组成。


PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。

1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。

简介pmac运动控制卡
PMAC运动控制卡内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的运动控制卡。
伺服控制包
括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴
联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接
MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC运动控制卡的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和
多种反馈类型。
PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价
格不菲,但是使用及其方便,功能也极其强大。
PMAC于东控制卡它能够对
存储在内部的程序进行单独运算,执行运动程序、PLC程序进行伺服环更新,并以100Mb/s以太网口与主计算机进行通讯。
其速度、分辨率、带宽、伺服
控制精度等指标远远优于一般的控制器,具有位置比较脉冲输出和D/A输出,并且能够接收编码器的反馈信号,可以控制步进、交直流伺服、直线电机、
液压伺服等各类电机,可以接收多种检测元件的反馈功能,并且允许用户使
用VC++、C、C++、VB、Delphi等多种语言开发程序,极大地方便了用户。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样。
1.PMAC控制卡及泰道公司简介1.1PMAC控制卡PMAC是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国泰道(Delta Tau Data Systems, Inc )公司生产的功能强大的运动控制器,PMAC是目前世界上功能最强的运动控制器,同时也是当前开放式数控系统控制器的突出代表1.2泰道公司介绍泰道公司拥有三十多年丰富的运动控制经验,是首屈一指的创新型、高性能机器控制专家,拥有全球数百万轴的惊人控制能力;自从上世纪90年代初推出第一款基于DSP的8轴的PMAC产品,每三年左右便会推出一款新的产品,如今最新的第七代产品Power PMAC(基于Power PC)已达到惊人的256轴的控制能力。
1.3应用范围由于其灵活的结构和开放性的编程接口,PMAC有着非常广泛的从最简单的到最复杂的应用,如半导体制造、航空、通用自动化、机器人控制、半导体生产线自动化、各类数控机床、医药设备、各种测量和定位机具、包装生产流水线自动化等等。
以下是在一些公司中1.4PMAC特性PMAC是一台具有独立内存、独立运算操作能力的计算机,采用泰道独有的实时内核(基于DSP的卡)或实时Linux操作系统(基于Power PC的卡)通过存储在自己内部的程序进行单独的操作;它还是一台实时的、多任务的计算机,能自动对任务进行优先等级判别,先执行优先级高的任务。
PMAC既可以独立工作亦可按主机的命令进行工作,它和主机的通讯可以通过串行口也可以通过总线进行,通过总线通讯时,还可以将中断信号引入主机,从而实现非常灵活有效的控制系统。
PMAC可以通过灵活的类似Basic的高级语言(Power PMAC还可以用C语言)控制多轴运动,提供了运动控制、可编程逻辑控制、同主机交互等基本功能;并具有各种现场总线和多种反馈装置接口。
PMAC的最大特点是开放性。
允许用户根据自己的用途使用内部寄存器。
目录 PMAC控制卡学习(硬件) ............................................................................................................ 2 第一章 PMAC简介 .......................................................................................................................... 2 1.1 PMAC的含义和特点 .......................................................................................................... 2 1.2 PMAC的分类及区别 .......................................................................................................... 2 1.2.1 PMAC的分类 ........................................................................................................... 2 1.2.2 PMAC 1型卡与2型卡的主要区别 ........................................................................ 2 第二章Turbo PMAC Clipper控制器硬件配置 ................................................................................ 3 2.1 Turbo PMAC Clipper控制器简介 ....................................................................................... 3 2.2 Turbo PMAC Clipper硬件配置 ........................................................................................... 3 2.2.1 Turbo PMAC Clipper硬件标准配置为: ................................................................ 3 2.2.2 Turbo PMAC Clipper控制器可选附件 .................................................................... 6 2.2.2.1 轴接口板 ............................................................................................................ 6 2.2.2.2 反馈接口板 ........................................................................................................ 6 2.2.2.3 数字I/O接口板 ................................................................................................ 7 第三章 Turbo PMAC Clipper设备连接 ........................................................................................... 7 3.1 板卡安装............................................................................................................................ 7 3.2 控制卡供电 ........................................................................................................................ 7 3.2.1 数字电源供电 ......................................................................................................... 7 3.2.2 DAC(数字/模拟转换) 输出电路供电 ................................................................ 7 3.2.3 标志位供电 ............................................................................................................. 8 3.3 限位及回零开关 ................................................................................................................ 8 3.3.1 限位类型 ................................................................................................................. 8 3.3.2 回零开关 ................................................................................................................. 8 3.4电机信号连接 ..................................................................................................................... 8 3.4.1增量式编码器连接 .................................................................................................. 8 3.4.2 DAC 输出信号 ......................................................................................................... 9 3.4.3 脉冲&方向(步进)驱动 .................................................................................... 10 3.4.4 放大器使能信号(AENAn/DIRn) ............................................................................ 10 3.4.5 放大器错误信号(FAULT-) ..................................................................................... 10 3.4.6 可选模拟量输入 ................................................................................................... 11 3.4.7 位置比较输出 ....................................................................................................... 11 3.4.8 串行接口(JRS232) ................................................................................................. 11 3.5 设备连接示例 .................................................................................................................. 11 3.6 接口及指示灯定义 .......................................................................................................... 13 3.7 跳线定义.......................................................................................................................... 15 3.8 Turbo PMAC Clipper端口布置及控制结构图 ................................................................. 19 附件 ................................................................................................................................................ 21 1.接口各针脚定义 ................................................................................................................... 21 2. 电路板尺寸及孔位置 ........................................................................................................ 30