反铲挖掘机工作装置设计
- 格式:doc
- 大小:2.34 MB
- 文档页数:21
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计*****学号:********指导老师:冯*09工程机械2班目录一.机械原理设计任务书 (4)§1.1设计题目简介 (4)§1.2设计任务 (4)二.单斗液压挖掘机结构简图 (6)三.设计中小型液压挖掘机结构参数一览表(参照下图) (8)§3.1单斗液压挖掘机结构几何参数详表 (8)§3.2斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (9)四.确定下列所给满足要求的结构参数 (12)§4.1确定长度与角度结构参数 (12)§4.2斗形参数的选择 (15)§4.3最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (16)§4.3.1最大挖掘深度 (16)§4.3.2最大挖掘半径 (17)§4.3.3最大卸载高度 (17)五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (19)§5.1动臂液压缸 (19)§5.2斗杆液压缸 (19)§5.3铲斗液压缸 (20)六.机构自由度分析 (21)七.仿真 (22)八.机构搭建图 (23)九.参考文献: (25)十.心得和体会 (24)完成日期:年月日指导教师一.机械原理设计任务书学生姓名舒康班级09工机2班学号20097588设计题目:反铲液压挖掘机工作装置设计§1.1设计题目简介反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
设计数据与要求题号铲斗容量挖掘深度挖掘高度挖掘半径卸载高度铲斗挖掘力B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN§1.2设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
反铲挖掘机工作装置设计说明书目录1. 设计任务 (1)2. 工作装置主要部件的参数设计 (1)2.1 反铲工作装置结构方案的确定 (1)2.1.1 确定动臂结构形式和动臂油缸的布置方案 (2)2.1.2 确定斗杆和斗杆油缸的布置 (2)2.1.3 确定铲斗连杆机构的结构形式 (2)2.2 铲斗结构参数的确定 (2)2.3 动臂机构设计 (3)2.3.1 动臂机构设计的主要内容 (3)2.3.2 具体的设计步骤 (3)2.4 斗杆机构的设计 (7)2.4.1 反铲斗杆机构设计的主要内容 (7)2.4.2 斗杆具体设计步骤 (7)2.5 反铲铲斗连杆机构的设计 (8)3. 反铲工作装置的运动分析及坐标计算 (9)3.1 符号约定与坐标系的建立 (9)3.2 反铲工作装置工况的选定 (10)3.3 回转平台的运动分析及坐标计算 (10)3.4 动臂的运动分析及坐标计算 (11)3.5 斗杆的运动分析及坐标计算 (12)3.6 连杆及铲斗的运动分析及坐标计算 (14)4. 反铲工作装置作业参数计算 (16)4.1 最大挖掘深度1h 计算 (16)4.2最大挖掘高度2h 计算 (17)r计算 (17)4.3最大挖掘半径1r (17)4.4 停机面上的最大挖掘半径h (18)4.5 最大卸载高度34.6 最大垂直挖掘深度4h (18)4.7 水平底面为2.5m时的最大挖掘深度5h (19)4.8 计算结果对比 (19)5. 某工况下铰点K、Q的受力分析 (20)5.1 工况选定 (20)5.2 铰点K、Q的受力分析 (20)6. 工作装置主要部件的三维建模 (22)6.1 零部件的三维建模 (22)6.2 整体三维模型 (25)7. 包络图的绘制 (25)7.1 ADAMS软件简介 (25)7.2 Solidworks模型导入ADAMS步骤 (26)7.3反铲工作装置的ADAMS挖掘包络图绘制步骤 (26)反铲挖掘机工作装置设计说明书1. 设计任务1)设计一款反铲挖掘机的工作装置,完成其工作装置的参数设计;2)选定某个工况,进行工作装置的运动分析并且完成该工况下的铰接点坐标计算;3)反铲工作装置的主要作业参数计算;4)选定某个工况,完成该工况下某几个铰接点的受力分析;5)运用三维建模软件,完成工作装置的三维建模工作;6)运动动力学仿真软件ADAMS,画出工作装置的挖掘包络图。
液压挖掘机反铲工作装置的优化分析摘要:液压挖掘机是重要的工程机械,应用范围广泛,设计要求较高。
掘机的主要工作就是挖掘土壤,其挖掘任务由工作装置来完成,挖掘机一般在户外工作,因此经常面临复杂的工作环境,这就对其液压系统的设计提出了更高的要求。
本文就挖掘机工作装置的液压系统设计展开探讨。
关键词:挖掘机;工作装置;液压系统目前,随着最前沿技术和控制方式的不断改进、革新,液压操纵、气压操纵、液压伺服操纵等操纵方式逐步取代传统的杠杆操纵,大大提高了生产效率,但由于挖掘机的工作环境复杂多变,需要高性能的液压系统,使得挖掘机在极端情况下保持稳定的工作状态,因此,针对已有的液压装置的缺陷,对挖掘机工作装置的液压系统的工作机理进行研究,进行设计改良,完善作业能力,为实现作业操纵的完全自动化创造基础和前提。
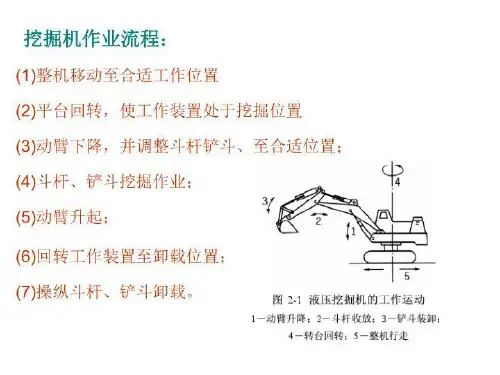
1、典型挖掘机液压系统的基本动作分析(1)挖掘。
通常情况是铲斗液压缸或斗杆液压缸分别进行单独挖掘,或者二者配合进行挖掘,在挖掘过程中主要是铲斗和斗杆有复合动作,必要时配以动臂动作。
(2)满斗举升回转。
挖掘结束后,动臂缸将动臂顶起、满斗提升,同时回转液压马达使转台转向卸土处,此时主要是动臂和回转的复合动作。
动臂举升和回转同时动作时,二者要求在速度上匹配,要求回转到指定卸载位置时,动臂和铲斗自动举升到正确的卸载高度。
由于卸载所需要回转角度不同,随挖掘机相对自卸车的位置而变,因此动臂举升速度和回转速度相对关系应该是可调整的,若卸载回转角度大,应该要求回转速度快些,而动臂举升速度慢些。
(3)卸载。
回转至卸土位置时,转台制动,用斗杆调节卸载半径和卸载高度,用铲斗缸卸载。
为了调整卸载位置,还需要动臂配合动作。
卸载时,主要是斗杆和铲斗复合作用,兼以动臂动作。
(4)空斗返回。
卸载结束后,转台反向回转,同时动臂缸和斗杆缸相互配合动作,把空斗放到新的挖掘点,此时工况是回转、动臂和斗杆复合动作。
由于动臂下降有重力作用,压力低、泵的流量大、下降快,要求回转速度快,因此该工况的供油情况通常是一个泵全部流量供回转,另一泵大部分油供动臂,少部分油经节流供应斗杆。
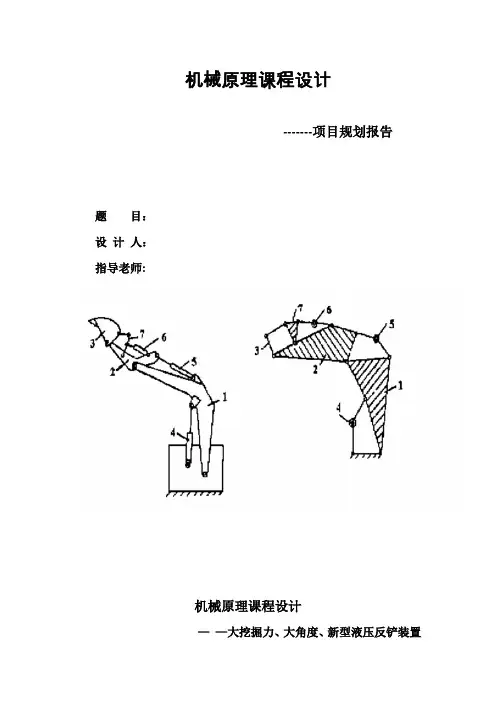
机械原理课程设计-------项目规划报告题目:设计人:指导老师:机械原理课程设计——大挖掘力、大角度、新型液压反铲装置(一)反铲装置的一般结构反铲装置是中小型液压挖掘机最主要的工作装置。
(1)结构方案(一)动臂及斗杆的结构形式动臂是工作装置中的主要构件,斗杆的结构型式往往取决于动臂的结构型式。
反铲动臂可分为整体式和组合式两类。
整体式动臂有直动臂和弯动臂两种。
直动臂构造简单、轻巧、布置紧凑,主要用于悬挂式挖掘机,如图2—1所示。
采用整体式弯动臂有利于得到较大的挖掘深度,它是专用反铲装置的常见形式(图2—2)。
整体式弯动臂在弯曲处的结构形状和强度值得注意,图2—3所示三节弯动臂有利于降低弯曲处的应力集中。
图2-3三节弯动臂近年来悬挂式挖掘机上出现了小弯臂的结构形式(图2—4),是直动臂的改良,动臂的箱形结构可以不用开口,动臂和斗杆油缸及管路的布置也比较方便。
整体式动臂结构简单、价廉,刚度相同时结构重量较组合式动臀轻。
它的缺点是替换工作装置较少,通用性较差。
为了扩大机械通用性,提高其利用率。
往往需要配备几套完全不通用的工作装置。
一般说,长期用于作业条件相似的反铲采用整体动臂结构比较合适。
组合式动臂一般都为弯臂形式。
其组合方式有两类,一类用辅助连扦(或按压缸)连接,另一类用螺栓连接。
图2—4悬挂式小弯臂连杆或液压缸铰接方案,如图2—5所示,其上、下动臂之间夹角可以借助辅助连杆或液压缸调节。
因中a为液压缸(或连杆)布置在动臂前下方的形式,b为连杆(或液压缸)布置在下动臂后上方的形式。
采用辅助液压缸来代替连杆,在作业过程中可随时进行大幅度、无级地调整上、下动锈夹角,从而提高机械的工作性能。
特别在用抓斗或反铲挖掘窄而深的基坑时,采用此方案容易得到较长距离的垂直挖掘轨迹因此可以提高挖掘质量和生产率。
由于辅助液压缸受力较大,液压缸缸径也要求较大,与其它工作液压缸缸径不易统一,在系统结构和操作上部比较复杂,实际使用中不如辅助拉杆普遍。
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计姓名:舒康学号:20097588指导老师:冯鉴09工程机械2班目录一.机械原理设计任务书 (4)§1.1设计题目简介 (4)§1.2设计任务 (4)二.单斗液压挖掘机结构简图 (6)三.设计中小型液压挖掘机结构参数一览表(参照下图) (8)§3.1单斗液压挖掘机结构几何参数详表 (8)§3.2斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (9)四.确定下列所给满足要求的结构参数 (12)§4.1确定长度与角度结构参数 (12)§4.2斗形参数的选择 (15)§4.3最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (16)§4.3.1最大挖掘深度 (16)§4.3.2最大挖掘半径 (17)§4.3.3最大卸载高度 (17)五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (19)§5.1动臂液压缸 (19)§5.2斗杆液压缸 (19)§5.3铲斗液压缸 (20)六.机构自由度分析 (21)七.仿真 (22)八.机构搭建图 (23)九.参考文献: (25)十.心得和体会 (24)完成日期:年月日指导教师一.机械原理设计任务书学生姓名舒康班级09工机2班学号20097588设计题目:反铲液压挖掘机工作装置设计§1.1设计题目简介反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
设计数据与要求题号铲斗容量挖掘深度挖掘高度挖掘半径卸载高度铲斗挖掘力B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN§1.2设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
[键入公司名称]机械设计原理大作业反铲挖掘机工作装置设计A[键入作者姓名][选取日期]专业:城轨一班姓名:王波学号:20116531指导教师:温亚莲目录第一章:绪论 (1)1.1:设计题目及简介 (1)1.2:反铲式挖掘机简介 (2)第二章:挖掘机机械原理 (3)2.1:计算挖掘机的自由度 (3)2.2:挖掘机工作原理 (3)2.3:几个特殊位置的确定 (4)2.3.1:最大挖掘深度1H (5)2.3.2:最大挖掘高度2H (5)2.3.3:最大卸载高度3H (5)2.3.4:最大挖掘半径R (6)2.4:工作装置参数的确定 (6)2.4.1:铲斗各参数的确定 (8)2.4.2:铲斗其他参数的确定 (9)2.5:动臂机构参数的确定 (9)2.5.1:1 与A 点坐标的确定 (9)2.5.2:l 1和l 2的计算 (9)2.5.3:l 41和l 42的计算 (10)2.6:斗杆机构参数的计算 (10)2.7:铲斗机构的参数选择 (11)2.7.1:转角范围 (11)2.7.2铲斗机构其它基本参数的计算 (11)第三章 (13)3.1:心得体会 (13)第一章:绪论1.1:设计题目及简介设计题目:反铲液压挖掘机工作装置设计A反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合图1.1:挖掘机设计数据与要求设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
毕业设计(论文)题目:液压挖掘机反铲工作装置设计学院:航空制造工程学院专业名称:机械设计制造及其自动化班级学号: 08031717学生姓名:指导教师:二O一二年六月1液压挖掘机反铲装置设计液压挖掘机是一种重要的工程机械,它的广泛应用对于减轻劳动量,保证工程质量,加快工程进度,提高劳动生产率起了巨大的作用。
反铲工作装置由动臂,斗杆,动臂液压缸,斗杆液压缸和铲斗液压缸组成。
本文根据液压挖掘机反铲装置的结构特点和工作原理,对其各主要机构进行了运动学分析。
并在此基础上,根据设计说明书的设计要求,结合各机构的工作特点和设计要求,在对各机构分析计算的同时,结合构件已知尺寸参数,算出各机构中构件的其它参数,为各构件的结构设计提供数据支撑。
挖掘力是衡量挖掘机挖掘能力的重要参数。
挖掘力是由各液压缸中的油液压力提供的,是主动力。
最大挖掘力的实现受诸多因素的制约,它是工作装置各铰点受力分析的基础。
挖掘阻力不仅与铲斗的尺寸形状有关,还与挖掘对象有关,是两者的综合反映。
关键词: 液压挖掘机 反铲装置 运动分析 参数设计 力学分析指导老师签名:The Design for Backhoe Equipmentof the Hydraulic ExcavatorStudent name : Dong Chen xi Class: 080317Supervisor: Xing PuAbstract: Hydraulic excavator is an important engineering machinery. Its wide application played a tremendous role to reducing the volume of labor and to ensuring project quality and to accelerating progress and to increasing productivity. Backhoe working devices is made up of a moving arm and a fighting pole and shovel and a hydraulic tank of moving arm and a hydraulic tank of fighting pole and a hydraulic tank of shovel.Based on the hydraulic excavator backhoe device characteristics and the structure of principle , to all the major institutions of the kinematic analysis . On this basis , in accordance with the design specification design requirements , with the bodies of the characteristics and design requirements , in terms of the various agencies at the same time , combining elements of known size parameters , calculated in the component agencies of other parameters , for various components , The shape of design data support.Mining is a measure of the ability of excavators digging the important parameters. Mining is done by the hydraulic cylinder of the pressure on the oil , is initiative , the largest excavation of the realization by many factors , it is also working device to hinge point Analysis of the foundation . Mining resistance not only reflect the size of bucket shape , but also with the excavation of the object , is a comprehensive reflection of the two.Keyword:hydraulic excavator backhoe device motion analysis design parameters mechanicalSignature of Supervisor:2目录1 前言1.1 课题背景及目的 (1)1.2 国内外研究状况 (1)1.3 论文构成及研究内容 (3)2 挖掘机工作装置的总体设计2.1 工作装置构成 (4)2.2 动臂及斗杆的结构形式 (5)2.3 动臂油缸与铲斗油缸的布置 (6)2.4 铲斗与铲斗油缸的连接方式 (6)2.5 铲斗的结构选择 (7)2.6 原始几何参数的确定 (8)3 挖掘机的工作装置详细的机构运动学分析3.1 动臂运动分析 (11)3.2 斗杆的运动分析 (12)3.3 铲斗的运动分析 (13)3.3.1铲斗的传动比 (13)3.3.2最大卸载高度 (15)3.3.3最大挖掘半径 (16)4 工作装置各部分的基本尺寸计算和验证4.1 铲斗各参数的确定 (17)4.1.1铲斗结构形状的设计及基本要求 (17)4.1.2铲斗主要参数的确定 (17)4.2 动臂机构参数的确定 (18)4.3 斗杆机构基本参数的选择 (20)4.4 铲斗机构基本参数的选择 (21)4.4.1转角范围 (21)4.4.2铲斗机构其它基本参数的计算 (21)5 工作装置结构设计5.1 挖掘阻力分析 (23)5.1.1转斗挖掘阻力计算 (23)5.1.2斗杆挖掘阻力计算 (24)5.2 斗杆的结构设计 (25)5.2.1斗杆的受力分析 (25)5.2.2结构尺寸的计算 (30)5.3 动臂结构设计 (32)5.3.1第一工况位置 (33)15.3.2第二工况位置 (36)5.3.3内力图和弯矩图的求解 (39)5.4 铲斗的设计 (43)5.4.1铲斗斗形尺寸的设计 (43)5.4.2铲斗斗齿的结构计算 (44)5.5 挖掘机工作装置油缸推力 (44)5.5.1铲斗油缸推力 (44)5.5.2斗杆油缸推力 (45)5.5.3动臂油缸推力 (45)5.6 销轴与衬套的设计 (46)5.6.1销轴的设计 (46)5.6.2销轴用螺栓的设计 (46)5.6.3衬套的设计 (46)6 结论参考文献 (48)致谢 (49)附录:三维建模,装配截图 (50)2液压挖掘机反铲装置设计1前言1.1课题背景及目的液压挖掘机是一种重要的工程机械,广泛应用于工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等行业的机械化施工中,对减轻繁重的体力劳动、保证工程质量、加快建设速度、提高劳动生产率起着十分巨大的作用。
任务书论文(设计)题目:液压挖掘机工作装置结构设计学号:姓名:专业:指导教师:系主任:一、主要内容及基本要求本设计的主要内容为:1.拟定挖掘机挖掘动作的结构方案;2. 按照方案的要求进行结构参数的计算及工艺参数的选择;3. 关键零部件的设计计算;4.根据参数查找结构设计方面的书籍,进行工作装置整体结构设计。
本设计的基本要求如下:1.掌握挖掘机动臂、斗杆、铲斗的结构参数的计算及各工艺参数的选择;2.掌握利用装配图、零件图表达设计意图。
二、重点研究的问题本设计的重点研究问题有两个:1.工作装置结构设计。
对各种实现方案进行对比,从中选择最佳结构;2.挖掘动作实现方案设计。
对挖掘机工作装置可达工作空间的分析。
三、进度安排序号各阶段完成的内容完成时间1 查阅相关资料第1周2 确定工作装置整体结构第2-3周3 零部件的强度、刚度校核第4-6周4 根据选定的一种结构设计方案,用计算机或手工绘制系统传动图、装配图、主要零件图第7-11周5 翻译相关英文资料一份3000字左右第12周6 撰写毕业论文(设计)说明书第13周78四、应收集的资料及主要参考文献【1】《液压挖掘机》:高衡张全根同编中国建筑工业出版社 1981年【2】《单斗液压挖掘机》:同济大学主编中国建筑工业出版社 1986年【3】《液压传动》:章宏甲,黄谊主编机械工业出版社2002年【4】《工程机械优化设计》;陈育仪编著中国铁道出版社1987年【5】《工程机械构造图册》;刘希平主编机械工业出版社 1990年【6】《新编机械设计手册》;蔡春源主编辽宁科学技术出版社 1993年【7】《液压元件与系统设计》;李玉琳主编北京航空航天大学出版社 1991年【8】《液压挖掘机反铲工作装置整机理论复合挖掘力的计算模型及其应用研究》;荣洪均主编重庆大学出版社 2007年【9】《液压挖掘机工作装置结构性能分析》;任友良主编 2010年【10】《工程机械结构与设计》;靳同红,王胜春主编化学工业出版社 2009年【11】《液压挖掘机构造与维修手册》;王晓伟,张青等主编化学工业出版社 2007年【12】《机械设计》(第八版);濮良贵,纪名刚主编高等教育出版社 2006年【13】《材料力学》(第4版) ;刘鸿文主编高等教育出版社 2004年【14】《理论力学》(Ⅰ);哈尔滨工业大学理论力学教研室编高等教育出版社 2009年【15】《工程机械》、《建筑机械化》等有关学术杂志在近年来发表的相关文献。
液压反铲装置设计摘要:本次设计的题目是液压挖掘机反铲装置机构。
与其它类型的挖掘机相比,这种类型的挖掘机因有良好通过性能应用最广,对松软地面或沼泽地带还可采用加宽、加长以及浮式履带来降低接地比压。
液压挖掘机反铲装置的主要特点为:反铲是中小型液压挖掘机的主要工作装置。
液压挖掘机的反铲装置由动臂,斗杆铲斗,以及动臂油缸,斗杆油缸,铲斗油缸和连杆机构组成。
其构造特点是各部件之间的连接全部采用铰接,通过油缸的伸缩来实现挖掘工作中的各种动作。
动臂的小铰点与回转平台铰接,并以动臂油缸来支撑和改变动臂的倾角,通过动臂油缸的伸缩可使动臂绕小铰点转动而升降。
斗杆铰接于动臂的上端,斗杆与动臂的相对位置由斗杆油缸来控制,当斗杆油缸伸缩时,斗杆便可绕动臂上焦铰点转动。
铲斗与斗杆前端铰接,并通过铲斗油缸伸缩使铲斗绕该点转动。
为增大铲斗的转角,通常以连杆机构与铲斗连接。
本次设计的主要参数是斗容量0.2m3,它属于中小型液压挖掘机,主要设计挖掘机的工作装置。
在设计中,采用了轮胎式行走装置,来满足要求。
上部转台是全回转式,因此它可在一个更大的范围内工作。
又因采用液压传动控制而使整机性能得以改善。
与机械式挖掘机相比,其挖掘力提高到2~3倍,整机质量约为5吨,挖掘力约为30kN,最大卸载高度约为2.65m,最大挖掘深度4.2m,最大挖掘半径约为5.728m,从中可以看出整机作业能力有了很大的改进,不仅挖掘力大,且机器重量轻,传动平稳,作业效率高,结构紧凑。
另外,还对挖掘机的工作装置提出基于结构推理的机构方案创新设计方法。
关键词:液压挖掘机;挖掘机构;创新设计指导教师签名:The design of hydraulic excavator shovel deviceStudent name:luyue class:0781052Supervisor:xingpuABSTRACT:This designed topic is the marching hydraulic excavator excavational organization. Compared with other types excavators, this kind of type excavator used very universal that because has good through theperformance, also may use to lengthens widens as well as the floating type caterpillar band to reduce pressure for the soft ground or the bogregion.The hydraulic excavator main characteristic is: The small and medium-sized hydraulic excavator shovel is the main work device. Hydraulic excavator shovel device by the arm, dou stem bucket, and arm oil cylinder, dou rod oil cylinders, the bucket of cylinder and linkage mechanism. Its structure feature is between components All adopt the connection by oil cylinder hinged adjustable to realize the various movements excavation. Moving arm little hinge point and rotary platform, and with hinged arm oil cylinder to support and change the dip Angle, through arm arm Oil cylinder telescopic can make moving arm around small hinge point lifting rotation. Dou lever arm hinged on the upper arm, dou rod and the relative By dou pole position to control oil cylinder, when dou rodoil cylinder telescopic, dou lever arm can be around the upper energizer hinge point rotation. Bucket and measures Rod front-end loader, and through hinged cylinder telescopic made the bucket turning around the point. To increase the bucket corner, usually by connecting rod Institutions and bucket connection. theperformance good,and may make the high speed reverse, the transmissionsteady,structure simple, may absorb attacks and vibrates, the operation reduces effort, and to be easy to realize the automated control, is easy to realize the standardization, the seriation, the universalization.This designed main parameter is scoop capacity 0.2m3, it is long to the middle and small scale hydraulic excavator, mainly design the excavator,s the work installment and the hydraulic transmissionprinciple.In the design, used marching walked the installment to satisfied request. Upside the turnplate is the entire rotation , thereof it may work in a greater scope. And further because uses the hydraulicsteering to enable the entire machine performance to improve. Compared with the mechanical type excavator, its excavation strength enhance to 2 ~ 3 times, the entire machine weight approximately is 5 tons,the excavation strength approximately is 30kN, the biggest unloading high approximately is 2.65m, biggest digging depth is 4.2m, the biggest excavation radius approximately is 5.728m, thus can see the entire machine work ability to have the very big improvement, not only excavation strength big, but also machine weight light, transmission steadyly,work efficiency is high, the structure is compact. Moreover, but also proposes to the excavator work installment based on the structureinference organization plan innovation design method.Key word:Hydraulic pressure excavator;Excavation organization;Hydraulic system;Innovation designSignature of supervisor:。
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计
*****
学号:********
指导老师:冯*
09工程机械2班
目录
一.机械原理设计任务书 (3)
§1.1 设计题目简介 (3)
§1.2 设计任务 (3)
二.单斗液压挖掘机结构简图 (4)
三.设计中小型液压挖掘机结构参数一览表(参照下图) (6)
§3.1 单斗液压挖掘机结构几何参数详表 (6)
§3.2 斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (7)
四.确定下列所给满足要求的结构参数 (9)
§4.1 确定长度与角度结构参数 (9)
§4.2 斗形参数的选择 (12)
§4.3 最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (12)
§4.3.1 最大挖掘深度 (12)
§4.3.2 最大挖掘半径 (13)
§4.3.3 最大卸载高度 (14)
五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (15)
§5.1 动臂液压缸 (16)
§5.2 斗杆液压缸 (16)
§5.3 铲斗液压缸 (17)
六.机构自由度分析 (18)
七.仿真 (19)
八.机构搭建图 (20)
九.参考文献: (21)
十.心得和体会 (21)
完成日期:年月日指导教师
一.机械原理设计任务书
学生姓名舒康班级09工机2班学号20097588 设计题目:反铲液压挖掘机工作装置设计
§1.1设计题目简介
反铲式是我们见过最常见的,向后向下,强制切土。
可以用
于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟
侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟
挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,
是一种适用于成批或中小批量生产的、可以改变动作程序的
自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大
和操作单调频繁的生产场合。
设计数据与要求
题号铲斗容
量挖掘深
度
挖掘高
度
挖掘半
径
卸载高度铲斗挖掘力
B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN
§1.2设计任务
1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;
2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;
3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
4、编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
二.单斗液压挖掘机结构简图
三.设计中小型液压挖掘机结构参数一览表(参照下图) §3.1单斗液压挖掘机结构几何参数详表
§3.2 斗容量为0.25 m 3 的小型单斗液压挖掘机结构详细参数
1.动臂液压缸mm L 1109min 1= , mm L 1774max 1=, 行程665mm
斗杆液压缸L 2min = 1116.8 mm ,L 2max = 1787 mm ,行程670mm 铲斗液压缸L 3min = 850mm ,L 3max =1360mm ,行程510mm
2.选择主参数:标准斗容量(m 3)为0.25 m 3,机器重量(t )为6 t 。
发动机功率(kw )取为59 kw 。
3.主要参数:反铲最大挖掘深度(m )5.8 m 。
最大挖掘半径(m )6 m 。
最大挖掘力不少于(KN )160 KN 。
工作次数(s )4-7次/min 。
四.确定下列所给满足要求的结构参数
§4.1确定长度与角度结构参数
整机质量计算公式:
m=2179+20147q=2179+20147*0.38=9834.86kg=9.835t
以液压挖掘机的机重为指标,用以下公式近似确定:
线尺寸参:L i=k li3G,
根据设计中小型液压挖掘机结构参数,利用上述公式通过matlab可解得以下结构参数:
§4.2 斗形参数的选择
斗容量q 、平均斗宽B 、转斗挖掘半径R 和转斗挖掘装满转角2ϕ(取为95°)四者之间有以下几何关系:
s K B R q )2sin 2(5.02ϕϕ-⨯=
取土壤松散系数25.1=s K ,R=0.95,得B=1.018米。
转斗挖掘时挖掘米容积的土所耗的能量称为转斗挖掘能容量,用符号E 表示。
取07.0,5.132==K K 。
得:E=)2sin 2cos 22sin 5.11002sin 2cos sin 2(232
ϕ
ϕϕ
ϕϕϕϕϕϕϕϕ-+-+--RK K B K =1.587K 式中,K ——挖掘过程中考虑其它因素影响的系数。
§4.3 最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算
§4.3.1 最大挖掘深度
当下置动臂油缸全缩,FQV 三点同一直线并处于垂直状态时得到最大挖掘深度,如图2-49:
最大挖掘深度:A Y l l l l H --+-++=1152min 111123max 1sin )sin(ααθα 解得:min 1θ=43° §4.3.2 最大挖掘半径
当斗杆油缸全缩,FQV 三点同一直线,而且V Y =0时可以得到停机面最大挖掘半径,如图2-7:
3022
40max 0l Y l X R C V +-===6.77m
C Y = h=1.3498m ,)cos()(2)(8max 323212322140αα-⨯+⨯⨯-++==l l l l l l CV l
得到:max 32α=133.6°
§4.3.3 最大卸载高度
当下置动臂油缸全伸,斗杆油缸全缩,QV 连线处于垂直状态时,可得到最大卸载高度,如图2-48:
臂铰离地高度系数k HO 范围0.6-0.7 取k HO =0.63,所以根据线尺寸参数:
L i =k li 3
G 得:
臂铰离地高度h=1.3498m ,
A Y = h-4l =1.3498-0.5456=0.8402m
最大卸载高度:
3
2118max 1max 322211max 11115max 3)180sin()sin(sin l l l l Y H A -----++--++= αααθαααθα解得:max 1θ=151.6 最大挖掘高度
)
180sin()()sin(sin 2118max 1max 3232211max 11115max ----+++--++=αααθαααθαl l l l Y H A
=6.41m
五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定
§5.1 动臂液压缸
计算m ax L ,min L ,摆角范围max 1ϕ
由上面公式解得:
max 1L = 2.294m ,min 1L =1.33m , max 1ϕ=108.6°
§5.2 斗杆液压缸
1.363603max 328640min 2=-----=αααααθ , 120max 2=θ 由上面公式可计算出:
min 2L = 1.374m , max 2L =2.019m ,m ax 2ϕ=83.9°
§5.3 铲斗液压缸
综合以往经验并对铲斗机构加以估算,因此给出
1353022≤≤α,
在△GMN 中,由余弦定理可计算得到:
min 3L = 1.183m , max 3L =1.844m
六.机构自由度分析
计算机构自由度:
H L P P n F --=23
活动构件数n =11,单铰数13个,复铰1个,所以,L P =15,H P =0,由上面公式可得自由度F =3×11—2×15=3
七.仿真
八.机构搭建图
西南交通大学峨眉校区机械工程系
九.心得和体会
一开始拿到题目后,脑袋一片空白,由于图书馆此书藏量有限,很多书已被借完,然后我在网上找到有关单斗液压挖掘机的教材和一些相关论文,然后详细研究,再加以总结,不断改进,终究在很多努力下,得以解出具体参数,接下来运用solidworks进行仿真,我在仿真上耗费了大量时间,终于能够实现其运动,但是最终遇到了一个大难题,运用solidworks中的motion插件进行运动分析时,始终出现错误,软件所列出的错误,而运动模型中根本不具有,因为模型的仿真运动并没有出现任何问题,我尝试过很多次,向很多同学请教过,但是还是没结果,因此未能画出输出机构的位移、速度、和加速度线图,请冯老师多多指教!
十.参考文献:
1.同济大学,太原重型机械学院等编著. 单斗液压挖掘机. 北京:中国建筑工业
出版社.1983:P59-111
2.唐金松主编. 简明机械设计手册. 上海:上海科学技术出版社. 2000:P41-73
3.冯鉴,何俊,雷智翔主编. 机械原理. 四川:西南交通大学出版社.
2008:P11-18
4.何挺继,朝勇主编. 现代公路施工机械. 北京:人民交通出版社. 1999:P66-74
21。