某纯电动汽车低速小油门标定研究
- 格式:docx
- 大小:27.21 KB
- 文档页数:2
基于CLTC工况的纯电动汽车单踏板再生制动系统经济性研究赵向阳吴启斌(河南工学院车辆与交通工程学院,河南新乡453003)摘要研究了基于CLTC(China light-duty test cycle)工况下的纯电动汽车匹配单踏板再生制动系统的经济性能。
对比了CLTC和NEDC(New european driving cycle)两种工况差异,并基于某车型在AVL_CURISE平台搭建虚拟仿真模型,建立配置单踏板制动能量回收控制系统的纯电动汽车模型;对比了不同工况下配置单踏板系统和原并联制动再生系统效果经济性能差异。
仿真结果表明,单踏板再生制动系统能量回收效果优于原并联再生制动系统,纯电动汽车NEDC切换为CLTC工况续驶里程差异较为有限。
关键词CLTC工况NEDC工况单踏板制动回收系统纯电动汽车AVL_CRUISE经济性Research on Economic Performance of Single Pedal Brake for PureElectric Vehicles based on CLTC Working ConditionZhao Xiangyang Wu Qibin(School of Vehicle and Traffic Engineering,He'nan Institute of Technology,Xinxiang453003,China)Abstract The economic performance of single pedal matched regenerative braking system for pure elec⁃tric vehicle under CLTC condition is studied.Firstly,the differences between the two working conditions of CLTC and NEDC are compared,and a virtual simulation model is built on AVL_CURISE platform based on a certain vehicle,a pure electric vehicle model equipped with a single pedal braking energy recovery control sys⁃tem is established.The economic performance differences between the single pedal system and the original par⁃allel braking regenerative system are compared under different working conditions.The simulation results show that,the single pedal braking system is better than the former parallel braking system,the replacement of NEDC with CLTC have limited impact on driving range.Key words CLTC working condition NEDC working condition Single pedal brake recovery system Pure electric vehicle AVL_CRUISE Economic performance0引言近些年,单踏板制动技术作为应用在纯电动汽车上的新技术逐渐受到研究学者的注意。
轻型汽车技术2021(1-2)技术纵横 31纯电动VCU 故障诊断策略研究与开发于海燕孔德胜王子腾王春芳(南京汽车集团有限公司汽车工程研究院)摘 要:基于整车控制开发的实际需求以及人身安全为原则,本文提出了基于纯电动VCU 故障诊断策略研究机制。
介绍了故障诊断的整体方案设计、故障的策 略开发原理以及故障处理的相应原则。
提出一种基于模型的诊断开发框架,一定程 度上缩短了开发周期,同时为具体诊断协议的实现提供了数据支撑。
关键词:故障诊断策略去抖算法故障处理1引言汽车电子控制系统的大量应用,提高了车辆 性能,增加了新功能,同时也产生了新的问题。
电 控系统自身的故障,可能导致汽车失控和不能运行。
从可靠性、安全性和可维护性的角度,汽车电控系统必须具备故障自诊断功能。
纯电动汽车由 于其对安全性能的特殊需求,对于故障诊断的能 力也就相应提高。
VCU 作为电动车上协调与控制部件系统有序运行的“大脑”,它通过判断和搜集相关部件与信息的有效状态,并实时监控与定位 整车控制逻辑与指令,对于异常突发状况,从安全 级别的要求,对相应故障做出响应,并对故障进行解析与相关信息获取。
对电动汽车故障做到提前 识别、及时处理、同时存储和报警.这对提高电动汽车的安全运行具有重大意义,并给电动汽车的 维护和修理工作提供可靠的依据。
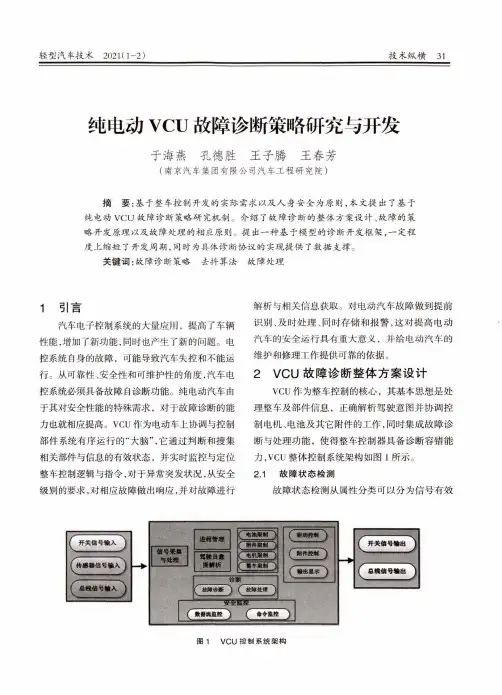
2VCU 故障诊断整体方案设计VCU 作为整车控制的核心,其基本思想是处理整车及部件信息,正确解析驾驶意图并协调控制电机、电池及其它附件的工作,同时集成故障诊 断与处理功能,使得整车控制器具备诊断容错能力,VCU 整体控制系统架构如图1所示。
2.1 故障状态检测故障状态检测从属性分类可以分为信号有效图1 VCU控制系统架构32技术纵横轻型汽车技术2021(1-2)网络通信检测模拟信号檢测油门踏板(1\2)制动踏板蓄电池參考电压故障•考电压故隔<SG SB.<X:>、i -)、采*电压故除采囊电&故吗<»■<)<Mi)、2路跆収佶号不成也■白学习故卑比优检劃数字信号检测当前故障状杰梅测数字输入信号划动开关X空SMMttfl«t字输山佶号<SG'.SBOC> >k»a>kSM・M・.*£a««a*a**M控IH逻辑检测故障状态检测故障响应古m断即[1测试失ft状检测本次耳M试失敢检M确的故楡A己■认的A检次J6测试%成检M上次清险试ft楡A4耳M试未检故*出*次.........故障码解析全局冻结檢解析故卑对应快煎解析DID鱗析图2VCU诊断框图性检测、控制逻辑检测、安全功能检测这三大方面。
新能源汽车的特点及核心技术的研究摘要:伴随着中国节约能源环境保护原理的逐步增强,新能源汽车因为燃油损耗少、污染物对外排放总量低等应用优势,受到了愈来愈多人的喜欢,至此也大大推进了中国新能源汽车的迅速提升发展。
新能源汽车具备优良的环境保护、静谧性,包括用车运营费用少等特点,从汽车损耗的能源种类样式存在差异,新能源汽车划分为纯电动汽车、混合动力汽车、燃料化学电池电动控制型汽车,包括氢发动机引擎汽车等,要推动新能源汽车的连续提升发展,就需不断提高整车控制器技术、电机控制器技术,包括电池管理技术的研究分析。
关键词:新能源汽车;特征;核心技术1新能源汽车特点1.1混合动力汽车混合动力汽车的永久动力,不只是出自于某一个构成方面,而是把电动机和传统类型的燃油发动机引擎集合在一起,使二者实现全新的平衡,损耗更少的能源实现一致的汽车行使路程,与此同时,污染物的对外排放总量也相比传统类型的燃油汽车要低许多。
在通常实际状况下,混合动力汽车的永久动力核心途径来源于电动机联动体系,包括内燃机联动体系,当混合动力汽车位于开启,包括驻车转态下的时候,一般都是由电动机为核心主要动力发展源泉,因此,汽车具备十分好的反应速率、车辆静谧性,也十分好,对自然生态环境的破坏,同时也是少之甚少。
在混合动力汽车在快速匀速正常行驶,或某一类独特运行标准工况下,运行工作的时候,却是通过发动机引擎为核心主要动力发展源泉,在这类实际状况下发动机引擎位于经济运行工作分布作用区间,仅仅要求损耗少数的燃油,就能够推进汽车的运行工作,很大地提升了燃油的使用效率,降低汽车的尾气对外排放,与此同时发动机引擎的运行工作,还可以为工作电池展开接通充电,保障汽车的工作电池电量长期一直位于健康分布作用区间内。
1.2 纯电动汽车纯电动汽车,只是以电动机为动力体系的新能源汽车,以混动动力汽车为核心中介体提升发展出的,纯电动汽车因为没有传统类型的发动机引擎,在汽车开启、正常行驶过程里噪音比较小,与此同时,无需要损耗传统类型的汽车化石燃料,同时也就不会对外排放出污染物,不会对周边自然生态环境形成损害,纯电动汽车同时也是新能源汽车提升发展了主流朝向。
纯电动汽车牵引力控制系统(TCS)的研究与开发王姝;蹇小平;张凯;刘浩丰【摘要】A traction control system (TCS) controler was designed for a pure electric vehicle with an unopened source motor using its software to meet anti-slip function requirements by selecting a MC9S12XS128 microcontroler (MCU). The hardware circuits were designed for main system, power system, signal conditioning, accelerator pedal signal colection, CAN (controler area network) bus colection, and the output system. The TCS had four modules for starting, running, braking, and fault monitoring. TCS control strategies were developed for different operating conditions. The function veriifcation test was completed for the four modules. The results show that the TCS controler works wel, and can limit the slip trend at about 10% effectively. Therefore, the controler can ensure vehicle safety and meet the anti-slip control requirements.%提出了一种用于纯电动汽车的牵引力系统(TCS)控制器。
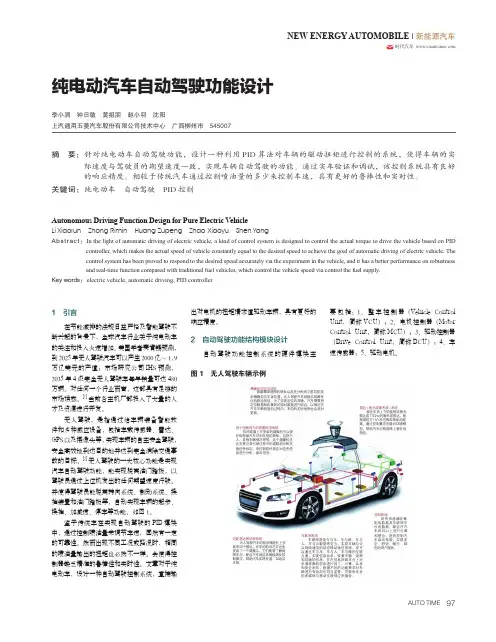
AUTO TIME97NEW ENERGY AUTOMOBILE | 新能源汽车时代汽车 纯电动汽车自动驾驶功能设计李小润 钟日敏 黄祖朋 赵小羽 沈阳上汽通用五菱汽车股份有限公司技术中心 广西柳州市 545007摘 要: 针对纯电动车自动驾驶功能,设计一种利用PID 算法对车辆的驱动扭矩进行控制的系统,使得车辆的实际速度与驾驶员的期望速度一致,实现车辆自动驾驶的功能。
通过实车验证和调试,该控制系统具有良好的响应精度。
相较于传统汽车通过控制喷油量的多少来控制车速,具有更好的鲁棒性和实时性。
关键词:纯电动车 自动驾驶 PID 控制1 引言在节能减排的法规日益严格及智能驾驶不断兴起的背景下,全球汽车行业关于纯电动车的关注和投入火速增加。
美国学者麦肯锡预测,到2025年无人驾驶汽车可以产生2000亿~1.9万亿美元的产值;市场研究公司IHS 预测, 2035年4级完全无人驾驶车每年销量可达480万辆。
对任何一个行业而言,这都具有足够的市场诱惑。
[1]当前各主机厂都投入了大量的人才及资源进行开发。
无人驾驶,是指通过给车辆装备智能软件和多种感应设备,包括车载传感器、雷达、GPS 以及摄像头等,实现车辆的自主安全驾驶,安全高效地到达目的地并达到完全消除交通事故的目标。
[2]无人驾驶的一大核心功能是实现汽车自动驾驶功能,能实现脱离油门踏板,以驾驶员通过上位机发出的任何期望速度行驶。
并使得驾驶员能脱离转向系统、制动系统、换挡装置和油门踏板等,自动实现车辆的起步、换挡、加减速、停车等功能。
如图1。
鉴于传统车在实现自动驾驶的PID 模块中,通过控制喷油量来调节车速,固然有一定的可靠性。
然而出现不同工况或路况时,相同的喷油量输出的扭矩也必然不一样。
会使得控制器缺乏精准的鲁棒性和实时性。
文章对于纯电动车,设计一种自动驾驶控制系统,直接输出对电机的扭矩请求值驱动车辆,具有更好的响应精度。
2 自动驾驶功能结构模块设计自动驾驶功能控制系统的硬件模块主要包括:1、整车控制器(Vehicle Control Unit,简称VCU);2、电机控制器(Motor Control Unit,简称MCU);3、驱动控制器(Drive Control Unit,简称DCU);4、车速传感器;5、驱动电机。
新能源电动汽车两档变速器的设计与实现一、纯电动汽车两挡自动变速器传动比优化及换挡品质研究摘要:汽车传动系统中,变速器作为关键构件,直接影响整车性能。
为了使电动汽车驱动电机的效率得到提升,对固定速比电动汽车进行改动,采用两挡传动比方案,促使驱动电机工作效率提高,进而使整车动力性能及经济性能得到提升。
主要对纯电动汽车两挡自动变速器传动比优化及换挡品质进行研究。
1、整车基本参数基于传统微型车对电动汽车进行研究,保留原车悬挂系统,动力电池采用锰酸锂电池,驱动电机采用永磁同步电机。
综合研究后,整车参数为:满载质量1 350 m/kg,机械传动效率0.9,轮胎滚动半径0.258 r/min,迎风面积1.868人/川2,空气阻力系数0.31.根据国标GB/T 28382—2012标准及市场定位,整车动力性指标如下:30 min最高车速〉80 km/儿最大爬坡速度>20%, 4%坡度的爬坡车速〉60 km/h,12%坡度的爬坡车速〉30 km/儿工况法行驶里程〉100 km。
2、驱动电机参数确定对电机进行选择时,要确保电机最大限度地工作在高效区,同时也要考虑电池组的峰值放电倍率。
2.1驱动电机功率在最高车速时计算以最高车速在水平道路上行驶,对加速阻力忽略不计,设风速为0,那么电机的输出功率即为尸二1 (第g/OOx I Q加;J 1 一名13 600 76 140 )IP1为最高车速时驱动功率;nt为机械传动效率;mg为整车满载质量;f(U)为滚动阻力系数;umax为最大车速;Cd为空气阻力系数;A为迎风面积。
其中:f (u) =1.2 (0.009 8+0.002 5[u/ (100 km/h) ]+ 0.000 4[u/ (100 km/h) ]4).按照实际需求及国际标准,选择100 km/h车速,根据式(2), 计算结果为0.015 24,代入式(1),计算结果为P1=13.2kW。
如果车速符合国家标准规定的不低于85碗勺,那么电机的功率还可以选择更小的。
汽车标定技术--标定概念概述及解释说明1. 引言1.1 概述汽车标定技术是指通过对车辆各个部件进行测试和调整,以确保其性能可靠和符合设计要求的一种技术。
标定是汽车制造和维修过程中不可或缺的环节,它涉及到提取并设置各类参数,使得车辆在运行时能够达到最佳状态和效率。
在现代汽车工业中,标定技术被广泛应用于车辆的动力系统、传感器、控制单元等关键部件的调试与优化过程中。
1.2 文章结构本文首先对汽车标定技术做概述,并介绍了标定技术的重要性和发展历程。
然后详细解释了汽车标定的过程步骤、参数选择与调整以及结果评估与优化等方面内容。
接着,通过实际案例分析探讨了发动机控制单元(ECU)、刹车系统和自动变速器等关键部件的标定应用。
最后,在结论部分总结了汽车标定技术的重要性,并展望了未来该技术的发展方向。
1.3 目的本文旨在全面介绍汽车标定技术及其应用领域,在读者理解标定的基本概念和原理的基础上,进一步了解标定技术在汽车制造和维修过程中的重要性。
通过案例分析和对未来发展方向的展望,读者将能够更加深入地了解汽车标定技术,并认识到其在提升汽车性能和驾驶安全方面的不可替代作用。
2. 汽车标定技术概述2.1 标定技术定义汽车标定技术是指通过对汽车零部件或系统的参数进行测量、调整和评估,使其达到设计要求或最佳性能的过程。
标定技术主要用于汽车工程领域,以提高汽车性能、可靠性和燃油经济性。
2.2 标定技术的重要性汽车标定技术对于确保汽车的安全性、稳定性和可靠性具有重要意义。
通过合理地调整和优化汽车各个系统的参数,可以使得汽车在不同环境条件下具备良好的驾驶动力、悬挂舒适度、刹车距离等特性。
此外,标定技术还可以提升发动机燃烧效率,减少尾气排放并提高燃油经济性。
2.3 标定技术的发展历程随着电子控制系统在汽车中的广泛应用,标定技术也得到了迅速发展。
早期的汽车标定主要依赖人工经验来调整参数,由于操作复杂且耗时耗力,在实际应用中存在一些局限。
新能源电动汽车整车控制系统关于汽车电控系统,它其实并不是新能源电动汽车专有的,燃油车同样具备,只不过新能源电动汽车的电控系统更加的复杂,也更强大。
汽车电控系统,就是汽车电子控制系统,是由模块控制的系统总称,它由硬件和软件构成,电控其实就是车辆所有电子控制系统的软件+硬件的总称,我们可以将整个电控系统理解为车辆的神经系统,这个系统可以控制车辆的运行能力,所以电控系统越强大,车辆的控制与行驶能力越出色。
今天咱们就来聊聊新能源汽车的整车控制系统。
整车控制系统由加速踏板位置传感器,制动踏板位置传感器,电子换挡器等输入信号传感器,整车控制器(VCU),电机控制器(MCU),电池管理系统(BMS)等控制模块和驱动电机,动力电池等执行元件组成。
组成构架图汽车上的这些控制器通过CAN网络来通信。
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
1.驾驶员驾驶意图解析主要是对驾驶员操作信息及控制命令进行分析处理,也就是将驾驶员的油门信号和制动信号根据某种规则,转化成电机的需求转矩命令。
因而驱动电机对驾驶员操作的响应性能完全取决于整车控制的油门解释结果,直接影响驾驶员的控制效果和操作感觉。
2.整车驱动控制根据驾驶员对车辆的操纵输入(加速踏板、制动踏板以及选档开关)、车辆状态、道路及环境状况,经分析和处理,向整车管理系统发出相应的指令,控制电机的驱动转矩来驱动车辆,以满足驾驶员对车辆驱动的动力性要求;同时根据车辆状态,向整车管理系统发出相应指令,保证安全性、舒适性。
3.制动能量回馈控制整车控制器根据加速踏板和制动踏板的开度、车辆行驶状态信息以及动力电池的状态信息(如SOC值)来判断某一时刻能否进行制动能量回馈,在满足安全性能、制动性能以及驾驶员舒适性的前提下,回收部分能量。
纯电动教练车模拟燃油车的控制策略分析与实现童维勇,陈兴钊(深圳市英威腾电动汽车驱动技术有限公司,广东深圳518106)摘要:对纯电动教练车替代燃油车的背景和优势进行了介绍,阐明了纯电动教练车模拟燃油车操控体验的主要要求,以怠速抖动和熄火控制为例,介绍了具体的控制策略及实现方法$关键词:纯电动教练车;操控特性;怠速抖动;模拟熄火中图分类号:&469.72文献标志码:A文章编号:1003-8639(2020)08-0006-04Analysis and Implementation of Control Strategy for Pure Electric Coach Simulating Fuel VehicleTONG Wei-yong,CHEN Xing-zhao(Invt Electric Vehicle Drive Technology(Shenzhen)Co,Ltd,Shenzhen518106,China) Abstract:This paper introduces the background and advantages of the pure electric coach vehicle instead of the fuel vehicle,expounds the main requirements of pure electric coach vehicle simulating the handling characteristics of fuel vehicle,and introduces the specific control strategies and implementation methods for idle wobbling and flameout control as an example.Key words:pure electric coach;handling characteristics;idle wobbling;flameout control童维勇(1982-),男,工程师,硕士,主要研究方向为新能源汽车电机控制和整车控制策略;陈兴钊(1993-),男,主要研究方向为新能源汽车整车控制策略。
某纯电动汽车低速小油门标定研究
摘要:驾驶性标定按照速度段来标定的方法,分为低速,中速,高速标定,其中每一个速度段又细分为油门踏板解析,能量回收标定。
驾驶性的结果评价一般分为主观评价和客观评价两方面。
主观评价要达成在测试工况下主观评价达到可接受的评分目标,客观评价要达成转速和扭矩振幅和响应时间不超过特定预设值的目标,本文主要阐述驾驶性主客观评价的判定方法,以及某车型低速小油门标定中遇到的加速冲击偏大的问题以及实际解决方法。
关键词:标定;驾驶性;电动汽车
1 驾驶性主客观评价标准
1.1 主观评价标准
目前对车辆驾驶性评估一般采用主观评价方法,执行主观评价需要在特定工况下进行,一般分为瞬态工况和稳态工况,再根据各个工况的加权取平均得到总的驾驶性主观评分。
就本文而言,执行的评价工况为低速小油门工况。
1.2 客观评价标准
客观评价指标包括电机转速超调 n 0 和转速下冲,电机实际扭矩和整车控制器扭矩指令差值 T diff ,电机扭矩响应时间。
低速小油门工况下的电机转速形态如图 1 所示,扭矩曲线形态如图 2 所示。
其中为转速超调 n 0 主要是由于电机转子和减速器间存在齿间间隙,当扭矩从零开始上升时,转子由原位置经过齿间间隙加速,转速快速上升,和前方齿轮接触瞬间达到最大,在完全啮合后由于受到阻力转速会下降,但是扭矩持续上升,转速又开始上升。
图 1 电机转速曲线
图 2 电机扭矩曲线
2 低速驾驶性标定以及问题
2.1 扭矩控制以及标定方法
该车型使用经典的转速-扭矩控制方法,如图 3 所示。
VCM 以油门踏板和电机转速信号作为输入,经过查表计算得到目标扭矩和扭矩变化率,当前扭矩按照变化率逐渐上升或下降到目标扭矩,VCM 将实时计算得到的扭矩发送给MCU,MCU 使用直接转矩控制技术按照此目标扭矩调节电机扭矩输出。
驾驶性的标定即标定 VCM 的油门踏板解析值和扭矩变化率,而 MCU 的则尽量减小输出扭矩和目标扭矩的误差,即提高扭矩控制精度。
图 3 扭矩控制方法
2.2 加速冲击问题的产生
在实际标定时,需要先标定油门踏板解析值再标定扭矩变化率。
为了保证动力性的主观体验,低速时的油门较小时的解析值不能给得太小,从而输出扭矩足够大,才能做到轻踩油门就有动力输出的驾乘体验。
使用预设的油门踏板和扭矩变化率,在车速为 10km/h~20km/h 时,反复间歇松踩油门踏板,每次开度区间在 5%~20%,在每次踩下油门踏板瞬间,乘员都会感受到明显的加速冲击,该工况下的主观评价仅为及格。
查看 CAN 总线上的数据,在升扭阶段,转速超调量已经达到 100rpm 左右,同时在转速超调产生时,MCU 的扭矩跟随精度较差,和 VCM 的指令最大绝对误差达到 7.2N·m,数据如图 4 所示。
显而易见,转
速突变带来的冲击会通过传动系统以及车身等部件传递给乘员,对于同一个车而言,超调量越大,冲击越明显。
在机械间隙不变的前提下,降低啮合时的扭矩可以减小超调量,即为降低扭矩变化率。
另一方面,MCU 使用直接转矩控制技术,转矩和指令的差值越大则意味着转矩波动越大,则转速波动越大,因此减小差值也可以减小超调量。
图 4 转速超调和扭矩误差
由前述分析可知,乘员感受到的加速冲击时由于转速超调产生的,能够调节的部分为油门踏板解析值,扭矩变化率以及 MCU 输出扭矩和目标扭矩的差值。
由于踏板解析值对乘员动力主观感受影响较大,一般不会调整该值,因此需要从扭矩变化率和扭矩精度着手。
3 解决方案以及验证
3.1 降低 VCM 控制变化率
首先从扭矩变化率着手,产生转速超调对应的转速约为1000rpm,扭矩约为10N·m,当前使用的扭矩变化率如表 2所示。
表 2 调整前扭矩变化率
经过反复试验和验证,在保证扭矩响应时间的前提下,将扭矩变化率略微降低,得到表 3 的扭矩变化率,在同样的工况下,转速超调量有所降低,达到
86rpm,MCU 扭矩和VCM 的指令最大绝对误差为 4.2N·m,如图 5 所示。
主观评价加速冲击感略有降低但并不能达到可接受的评级。
图 5 降低扭矩变化率转速超调降低
表 3 调整后扭矩变化率
3.2 提高 MCU 扭矩控制精度
在降低扭矩变化率的前提下,MCU 通过提高控制精度减小 MCU 输出扭矩和VCM 扭矩指令的差值,经过试验和验证,同样工况下,转速超调量降低到了
60rpm,MCU 扭矩和 VCM 的指令最大绝对误差为 4.2N·m,如图 6 所示。
主观评价加速冲击感大幅度降低,评分达到可接受评级,提高了驾驶舒适性。
图 6 提高 MCU 扭矩控制精度转速超调降低
4 结论
本文研究了纯电动车低速小油门工况下乘员主观感受加速冲击偏大的现象,结论如下。
升扭阶段转速变化幅度过大是引起乘员主观感受加速冲击偏大的原因。
整车控制器降低升扭阶段的扭矩变化率,进而降低了齿轮啮合时的扭矩,可以略微降低转速超调幅度。
在降低变化率的基础上,电机控制器提高扭矩控制精度,降低了扭矩波动幅度,进而可以降低转速超调量,达到了改善加速冲击感的目的,进而提高驾驶平顺性。
参考文献
[1] 周欣.基于用户使用模式的乘用车驾驶性量化评价方法[D].吉林大学,2016.。