大学理论力学十达朗贝尔原理答案
- 格式:doc
- 大小:3.77 MB
- 文档页数:28
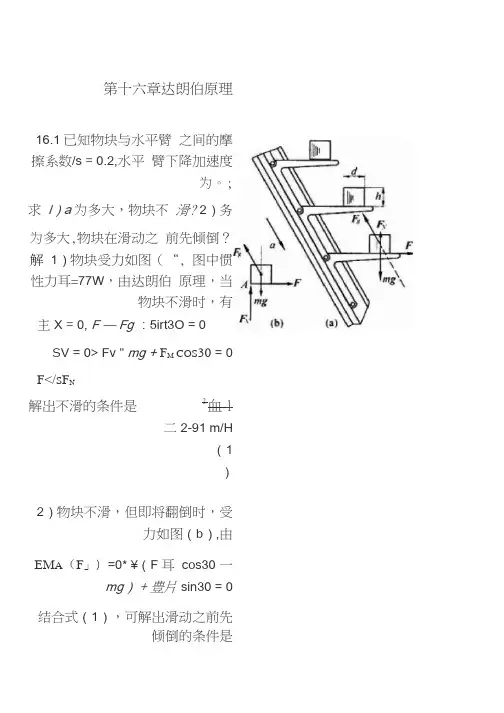
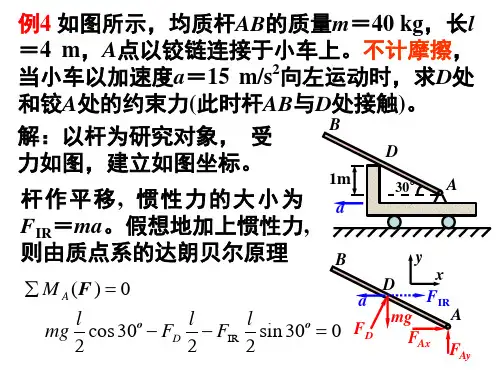
第十六章达朗伯原理16.1已知物块与水平臂之间的摩擦系数/s = 0.2,水平臂下降加速度为。
; 求l)a为多大,物块不滑? 2)务为多大,物块在滑动之前先倾倒?解1)物块受力如图(“, 图中惯性力耳=77W,由达朗伯原理,当物块不滑时,有主X = 0, F —Fg:5irt3O = 0SV = 0> Fv " mg + F M COS30 = 0 F</S F N解岀不滑的条件是2血l二2-91 m/H(1)2)物块不滑,但即将翻倒时,受力如图(b),由EM A(F」)=0* ¥(F耳cos30 一mg)+ 豊片 sin30 = 0结合式(1),可解岀滑动之前先倾倒的条件是h、1 孑鼻泾E6.2已知曲柄OC = rM匀角速度如转动;连杆召C = I端连有质量为櫛的物A ;求杆AB所受的力。
解设杆长AB =趴则物A 的运动方程为j : = b + r cos 爷 + I cos®cos® 1 — -y ^2 sin 2 卩j- = 6 + r cos 护 + I1 r2 . 2-2 7 s,n由达朗伯原理 SX = 0, mg - F - F* = 0得 AH 杆的力 F = 7ti[g + nw 2( cc^<p * y CQS 2^P )], 式中 ip — (Ait16.3已知 半径为『的圆轮对轴O 的转动惯量为丿*轮上 作用有恒力偶矩M 、轮缘上的销子C 推动质量为丹的滑槽ABD 沿水平滑道运动,滑道处摩擦系数为/ ■其余各处光滑;求 圆轮的转动微分方程。
解如图冷),圜盘角加速度为盘=花滑槽的运动方程和加 速度为J" = r COS 护, X = _ F (护2 8S 卩 + 0 审口爭)圆轮受力如图(b ),图中惯性力偶距皿0 =北=宛•由达朗伯原式中 cosB 二 J 1 -尹 sin* <p物块受力如图(b ),图中惯性力F 厂w(b)题16.3图乞Mo(F) = 0, A4 —- F.\r sin^j = 0得出J<p + F\r或1呻=M (1) 滑槽受力如图c、图中惯性力F f=豳,由达朗伯原理至X ~ 0* —P\ Fg l (F[ + F?) —0SY = 0, Fyp + F\i2 ~wg = 0 也及Fl =fFy;i, F2= JV池、Fy 二F、r 可得Fyj = Fv — ~ r>^ + fmg将式(2)代入式(1),得轮子的运动微分方程(J + mr~ sin2c:)G: + mr^ cos誓対口炉•炉'+ 6nijr sine? = M16.4已知物E质量m\ - 2 000 kg,物B质量酬2 =kg,物B下绳子拉力F r - 3 kN,不计滑轮的质量;求物E的加速度◎和绳FD的张力F HJC 解设物E*物B加速度如图*则a fl= 2a ;轮0和物E系统的受力.图中F曲=叱购=2叫;设轮O半径为厂2 .由达朗怕原理得SM Q( F) = 0, F( r;+ F测2「^1^2 什焜前2 =() ⑴轮C和物E系统的受力图中件=^2g, F;= Fi°设轮C半径为n,由达朗伯原理EM C(F)二0,_ *Fi厂I - F H Z I = 0SY = 0,F\ + F FD - mig - Eg = 0 (2) 由式(1)、(2)和其它各式,懈出一2丹七2如厂瞬“④讹/ni] +FfD^lg +-Wj-- = 10+21 kN16.5已知车重心为G,加速度为血’以及尺寸6f e t h ;求前后轮的压力;又,“为多大,方可使前后轮压力相等匸解设车质量为砒、受力如图,图中Fg = ma, P = mg 由达朗伯原理EM B(F) —0, (b+ c)F\x - 6P + hF K= 0SM A(F)= 0, -(b +CF.w + cP + = 0題込.4图4/2816.6已知曲杆线密度为宀圆弧半径为尸,以匀角速度绕轴O 转动,不计璽力,图(&)*求任意載面B处对AB段的约束反力。

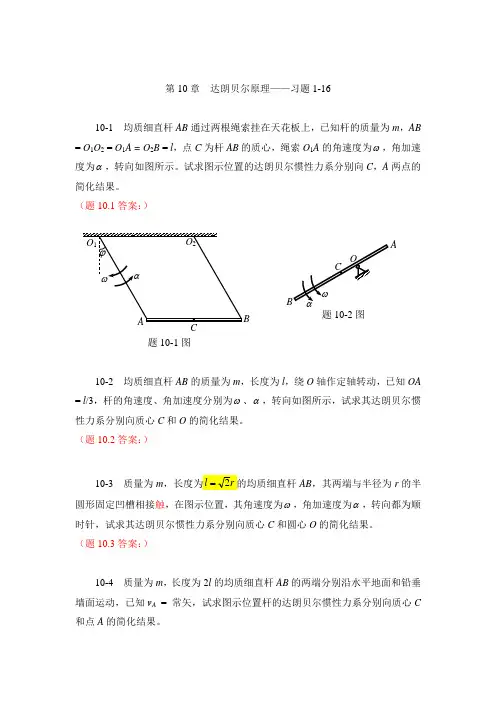
第10章 达朗贝尔原理——习题1-1610-1 均质细直杆AB 通过两根绳索挂在天花板上,已知杆的质量为m ,AB = O 1O 2 = O 1A = O 2B = l ,点C 为杆AB 的质心,绳索O 1A 的角速度为ω,角加速度为α,转向如图所示。
试求图示位置的达朗贝尔惯性力系分别向C ,A 两点的简化结果。
(题10.1答案:)10-2 均质细直杆AB 的质量为m ,长度为l ,绕O 轴作定轴转动,已知OA = l /3,杆的角速度、角加速度分别为ω、α,转向如图所示,试求其达朗贝尔惯性力系分别向质心C 和O 的简化结果。
(题10.2答案:)10-3 质量为mAB ,其两端与半径为r 的半圆形固定凹槽相接触,在图示位置,其角速度为ω,角加速度为α,转向都为顺时针,试求其达朗贝尔惯性力系分别向质心C 和圆心O 的简化结果。
(题10.3答案:)10-4 质量为m ,长度为2l 的均质细直杆AB 的两端分别沿水平地面和铅垂墙面运动,已知v A = 常矢,试求图示位置杆的达朗贝尔惯性力系分别向质心C 和点A 的简化结果。
题10-1图BC题10-2图A(题10.4答案:)10-5 均质杆AB 的质量为m ,长度为l ,用两根等长的绳索悬挂如图。
试求绳索OA 突然被剪断,杆开始运动的瞬时,绳索OB 的张力和杆AB 的角加速度。
(题10.5答案:)10-6 如图所示,质量为m ,长度为l 的均质杆由两根刚度系数为k ,质量不计的弹簧静止悬挂在空中,若突然将右边弹簧剪断,试求剪断瞬时杆AB 的角加速度和点A 的加速度。
(题10.6答案:)10-7 质量为m ,长度为2r 的均质杆AB 的一端A 焊接于质量为m ,半径为r 的均质圆盘的边缘上,圆盘可绕过圆盘中心的光滑水平轴O 转动,若在图示瞬间圆盘的角速度为ω,试求该瞬时圆盘的角加速度及杆AB 在焊接处所受到的约束力。
(题10.7答案:)题10-3图题10-4图题10-5图B题10-6图10-8 固连在一起的两轮子半径分别为r 、R ,它们的总质量为m 1,共同轮心C 为它们的质心,它们对过质心且垂直于纸面的轴的回转半径为ρ。

第13章作业答案
1、解 取圆柱形零件为研究对象,作受力分析,并虚加上零件的惯性力F I。
(1)零件不滑动时,受力如图b 所示,它满足以下条件:
(2)零件不滑动而倾倒时,约束力F N 已集中到左侧点A ,如图c 所示,零件在惯性力作用下将向左倾倒。
倾倒条件是
2、解 取车与矩形块为研究对象如图b 所示。
惯性力为
取矩形块为研究对象,如图c 所示,且矩形块惯性力为
由动静法,不翻倒的条件为
取物块为研究对象,惯性力如图3d 所示。
由动静法
3、解 取平板为研究对象,突然撤去销B 的瞬时平板的角速度ω =0,角加速度α ≠ 0。
平板对质心C 的转动惯量为
平板对A 的转动惯量为
把惯性力系向销A 简化(见图b)得
4、解 取2 球及杆CD 为研究对象如图b 所示,由动静法
5、解 忽略重力影响,惯性力F IC 作功
6、解 取整个系统为研究对象,受力如图b 所示。
因为转速n = 常量,所以角加速度α = 0,惯性力偶矩M I = 0。
(a )习题11-1图第11章 达朗贝尔原理及其应用11-1 均质圆盘作定轴转动,其中图(a ),图(c )的转动角速度为常数,而图(b ),图(d )的角速度不为常量。
试对图示四种情形进行惯性力的简化。
解:设圆盘的质量为m ,半径为r ,则如习题11-1解图:(a )2I ωmr F =,0I =O M(b )2n I ωmr F =,αmr F =tI ,αα2I 23mr J M O O == (c )0I =F ,0I =O M (d )0I =F ,αα2I 21mr J M O O ==11-2矩形均质平板尺寸如图,质量27kg ,由两个销子 A 、B 悬挂。
若突然撤去销子B ,求在撤去的瞬时平板的角加 速度和销子A 的约束力。
解:如图(a ):设平板的质量为m ,长和宽分别为a 、b 。
αα375.3I =⋅=AC m Fααα5625.0])(121[222I =⋅++==AC m b a m J M A A∑=0)(F AM ;01.0I =-mg M A ;2rad/s 04.47=α ∑=0x F ;0sin I =-Ax F F θ;其中:6.053sin ==θN 26.956.004.47375.3=⨯⨯=Ax F∑=0y F ;0cos I =-+mg F F Ay θ;8.054sin ==θ习题11-2图习题11-1解图(a )(a )N 6.1378.004.47375.38.927=⨯⨯-⨯=Ay F11-3在均质直角构件ABC 中,AB 、BC 两部分的质量各为3.0kg ,用连杆AD 、DE 以及绳子AE 保持在图示位置。
若突然剪断绳子,求此瞬时连杆AD 、BE 所受的力。
连杆的质量忽略不计,已知l = 1.0m ,φ = 30º。
解:如图(a ):设AB 、BC 两部分的质量各为m = 3.0kg 。
直角构件ABC 作平移,其加速度为a = a A ,质心在O 处。