理论力学课后答案9
- 格式:pdf
- 大小:1.01 MB
- 文档页数:15
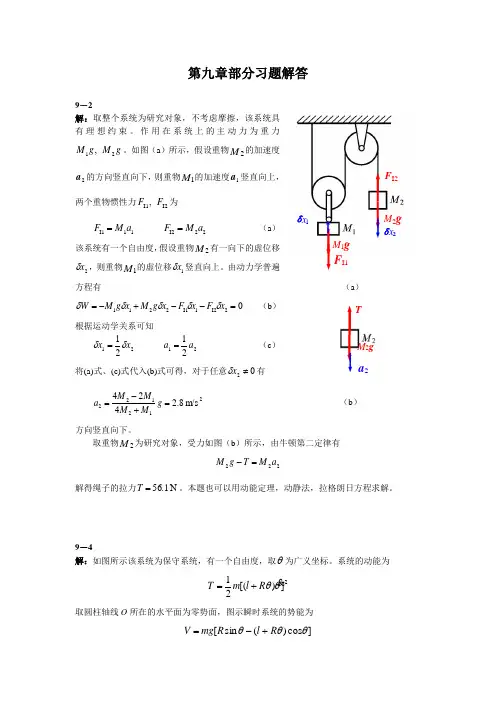
第九章部分习题解答9-2解:取整个系统为研究对象,不考虑摩擦,该系统具有理想约束。
作用在系统上的主动力为重力g M g M 21,。
如图(a )所示,假设重物2M 的加速度2a 的方向竖直向下,则重物1M 的加速度1a 竖直向上,两个重物惯性力I2I1,F F 为11I1a M F = 22I2a M F =(a )该系统有一个自由度,假设重物2M 有一向下的虚位移2x δ,则重物1M 的虚位移1x δ竖直向上。
由动力学普遍方程有 (a )02I21I12211=--+-=x F x F x g M x g M W δδδδδ (b )根据运动学关系可知2121x x δδ=2121a a =(c )将(a)式、(c)式代入(b)式可得,对于任意02≠x δ有212122m/s 8.2424=+-=g M M M M a (b )方向竖直向下。
取重物2M 为研究对象,受力如图(b )所示,由牛顿第二定律有222a M T g M =-解得绳子的拉力N 1.56=T 。
本题也可以用动能定理,动静法,拉格朗日方程求解。
9-4解:如图所示该系统为保守系统,有一个自由度,取θ为广义坐标。
系统的动能为2])[(21θθ R l m T +=取圆柱轴线O 所在的水平面为零势面,图示瞬时系统的势能为]cos )(sin [θθθR l R mg V +-=M 1gM 2gF I2F I1δx 2δx 1M 2gT a 2拉格朗日函数V T L -=,代入拉格朗日方程0)(=∂∂-∂∂θθL L dt d 整理得摆的运动微分方程为0sin )(2=+++θθθθg R R l 。
9-6解:如图所示,该系统为保守系统,有一个自由度,取弧坐标s 为广义坐标。
系统的动能为221S m T =取轨线最低点O 所在的水平面为零势面,图示瞬时系统的势能为mgh V =由题可知b s ds dh 4sin ==ϕ,因此有b s d b s h So8s 42==⎰。
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。

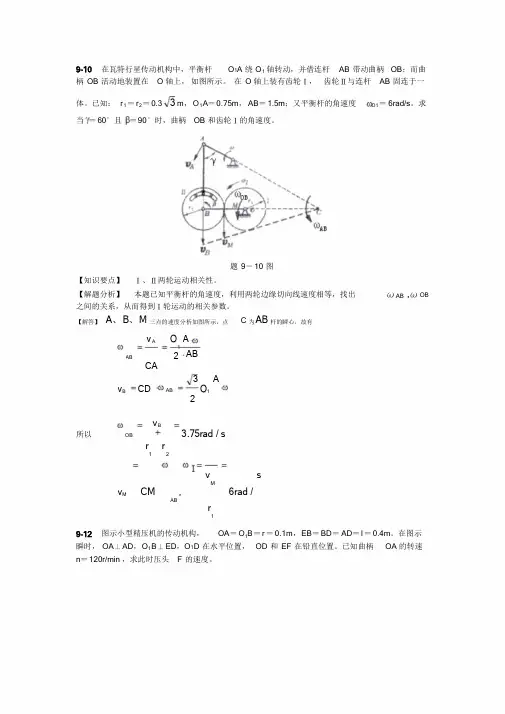
9-10在瓦特行星传动机构中,平衡杆O1A 绕O1 轴转动,并借连杆AB 带动曲柄OB;而曲柄OB 活动地装置在O 轴上,如图所示。
在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一体。
已知:r1=r2=0.3 3m,O1A=0.75m,AB=1.5m;又平衡杆的角速度O1=6rad/s。
求当=60°且=90°时,曲柄OB 和齿轮Ⅰ的角速度。
题9-10 图【知识要点】Ⅰ、Ⅱ两轮运动相关性。
【解题分析】本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。
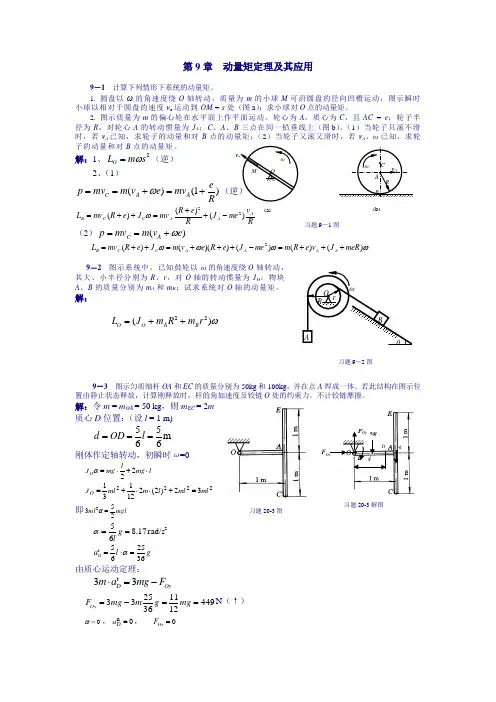
【解答】A、B、M 三点的速度分析如图所示,点 C 为AB 杆的瞬心,故有v A O1 AB 2CA A AB3v B CD AB O12Av B所以OB 3 .75rad / sr r1 2vMv M CM , 6rad /ABr1s9-12图示小型精压机的传动机构,OA=O1B=r=0.1m,EB=BD=AD=l=0.4m。
在图示瞬时,OA⊥AD,O1B⊥ED,O1D 在水平位置,OD 和EF 在铅直位置。
已知曲柄OA 的转速n=120r/min ,求此时压头 F 的速度。
题9-12 图【知识要点】速度投影定理。
【解题分析】由速度投影定理找到 A 、D 两点速度的关系。
再由D、E、F 三者关系,求 F 速度。
【解答】速度分析如图,杆ED 与AD 均为平面运动,点P为杆ED 的速度瞬心,故v F = v E = v D由速度投影定理,有v D cos vA2 2v r 2n r lA可得v F 1.30 / smcos 60 l9-16 曲柄OA 以恒定的角速度=2rad/s 绕轴O 转动,并借助连杆AB 驱动半径为r 的轮子在半径为R 的圆弧槽中作无滑动的滚动。
设OA=AB=R=2r=1m,求图示瞬时点 B 和点 C 的速度与加速度。
题9-16 图【知识要点】基点法求速度和加速度。

理论力学第七版课后习题答案第一章: 引言习题1-11.问题描述:给定物体的质量m=2kg,加速度a=3m/s^2,求引力F。
2.解答:根据牛顿第二定律F=ma,其中m表示物体的质量,a表示物体的加速度。
代入已知值,可求得F=6N。
习题1-21.问题描述:给定物体的质量m=5kg,引力F=20N,求加速度a。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=4m/s^2。
第二章: 运动的描述习题2-11.问题描述:一个物体以恒定速度v=10m/s匀速直线运动,经过t=5s,求物体的位移。
2.解答:位移等于速度乘以时间,即s=vt。
代入已知值,可得s=50m。
习题2-21.问题描述:一个物体以初始速度v0=5m/s匀加速直线运动,加速度a=2m/s^2,经过t=3s,求物体的位移。
2.解答:由于物体是匀加速直线运动,位移可以通过公式s=v0t+0.5at^2计算。
代入已知值,可得s=(53)+(0.52*3^2)=45m。
第三章: 动力学基础习题3-11.问题描述:一个物体质量为m=4kg,受到的力F=10N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2.5m/s^2。
习题3-21.问题描述:一个物体质量为m=3kg,受到的力F=6N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
第四章: 动力学基本定理习题4-11.问题描述:一个物体质量为m=8kg,受到的力F=16N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
习题4-21.问题描述:一个物体质量为m=6kg,受到的力F=12N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
以上是理论力学第七版课后习题的答案。
希望能对你的学习有所帮助!。
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
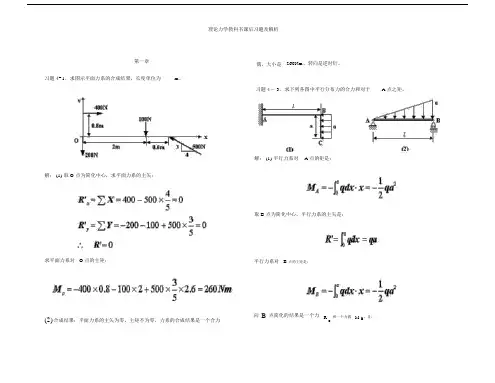
理论力学教科书课后习题及解析第一章偶,大小是260Nm,转向是逆时针。
习题 4- 1.求图示平面力系的合成结果,长度单位为m。
习题 4- 3.求下列各图中平行分布力的合力和对于 A 点之矩。
解: (1) 平行力系对 A 点的矩是:解: (1) 取 O 点为简化中心,求平面力系的主矢:取 B 点为简化中心,平行力系的主矢是:求平面力系对O 点的主矩:平行力系对 B 点的主矩是:(2)合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力向B点简化的结果是一个力RB和一个力偶M B,且:如图所示;向 A 点简化的结果是一个力R A和一个力偶M A,且:如图所示;将 R B向下平移一段距离d,使满足:最后简化为一个力R ,大小等于R B。
其几何意义是: R 的大小等于载荷分布的将 R A向右平移一段距离d,使满足:矩形面积,作用点通过矩形的形心。
(2)取 A 点为简化中心,平行力系的主矢是:最后简化为一个力R,大小等于R A。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
平行力系对 A 点的主矩是:列平衡方程:习题 4-4 .求下列各梁和刚架的支座反力,长度单位为m。
解方程组:反力的实际方向如图示。
校核:解: (1) 研究 AB 杆,受力分析,画受力图:结果正确。
(2) 研究 AB 杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:(3) 研究 ABC ,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:列平衡方程:反力的实际方向如图示。
校核:解方程组:结果正确。
反力的实际方向如图示。
校核:结果正确。
习题 4-5 .重物悬挂如图,已知G=1.8kN ,其他重量不计;求铰链 A 的约束反力和杆 BC 所受的力。
列平衡方程:解方程组:解: (1) 研究整体,受力分析(BC 是二力杆),画受力图:反力的实际方向如图示。
列平衡方程:习题 4-8 .图示钻井架,G=177kN ,铅垂荷载P=1350kN ,风荷载 q=1.5kN/m ,水平力 F=50kN ;求支座 A 的约束反力和撑杆CD 所受的力。
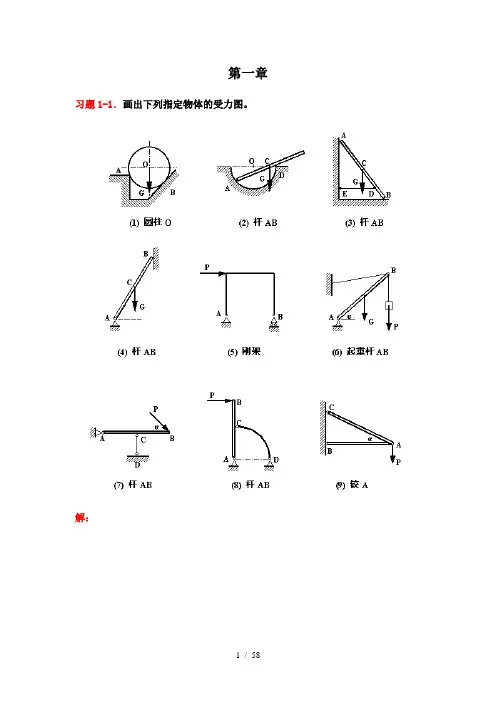
第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
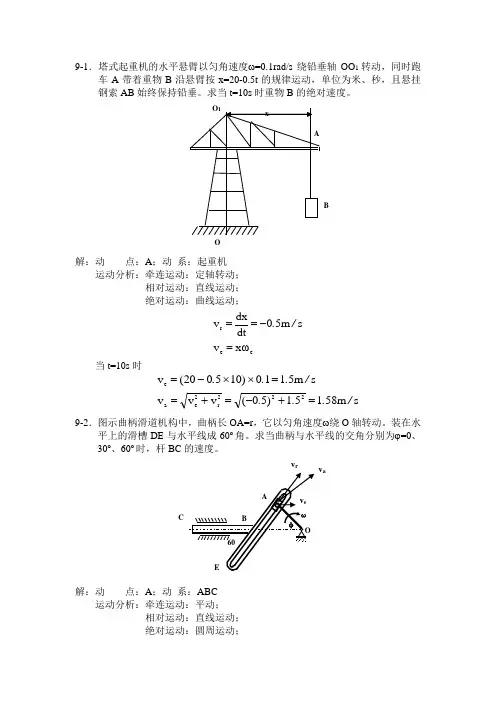
9-1.塔式起重机的水平悬臂以匀角速度ω=0.1rad/s 绕铅垂轴OO 1转动,同时跑车A 带着重物B 沿悬臂按x=20-0.5t 的规律运动,单位为米、秒,且悬挂钢索AB 始终保持铅垂。
求当t=10s 时重物B 的绝对速度。
解:动 点:A ;动 系:起重机运动分析:牵连运动:定轴转动; 相对运动:直线运动; 绝对运动:曲线运动;ee r ωx v sm 50dtdx v =-==/.当t=10s 时sm 58151)50(v v v s m 5110)105020(v 222r 2e a e /.../...=+-=+==⨯⨯-=9-2.图示曲柄滑道机构中,曲柄长OA=r ,它以匀角速度ω绕O 轴转动。
装在水平上的滑槽DE 与水平线成60o 角。
求当曲柄与水平线的交角分别为ϕ=0、30o 、60o 时,杆BC 的速度。
解:动 点:A ;动 系:ABC 运动分析:牵连运动:平动; 相对运动:直线运动; 绝对运动:圆周运动;OBC v rv a由正弦定理得:()()()12030φv v φ90v 30φv 120v ae rea sin sin sin sin sin -=-=-=当ϕ=0o 时, ωr 33v e -=当ϕ=30o 时, 0v e = 当ϕ=60o 时, ωr 33v e =9-3.图示曲柄滑道机构中,杆BC 为水平,而杆DE 保持铅垂。
曲柄长OA=10cm ,以匀角速度ω=20rad/s 绕O 轴转动,通过滑块A 使杆BC 作往复运动。
求当曲柄与水平线的交角分别为ϕ=0、30o 、90o 时,杆BC 的速度。
解:动 点:A ;动 系:BDC 运动分析:牵连运动:平动;相对运动:直线运动; 绝对运动:圆周运动;φv v s cm 200ωr v a e a sin /===当ϕ=0o 时, 0v e =;当ϕ=30o 时, s cm 100v e /=; 当ϕ=90o 时, s cm 200v e /=9-4.矿砂从传送带A 落到另一传送带B 的绝对速度为v 1=4m/s ,其方向与铅垂线成30o 角。
第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
9-1在图示系统中,均质杆OA 、AB 与均质轮的质量均为m ,OA 杆的长度为1l ,AB 杆的长度为2l ,轮的半径为R ,轮沿水平面作纯滚动。
在图示瞬时,OA 杆的角速度为ω,求整个系统的动量。
ω125ml ,方向水平向左题9-1图 题9-2图9-2 如图所示,均质圆盘半径为R ,质量为m ,不计质量的细杆长l ,绕轴O 转动,角速度为ω,求下列三种情况下圆盘对固定轴的动量矩: (a )圆盘固结于杆;(b )圆盘绕A 轴转动,相对于杆OA 的角速度为ω-; (c )圆盘绕A 轴转动,相对于杆OA 的角速度为ω。
(a )ω)l R (m L O 222+=;(b )ω2ml L O =;(c )ω)l R (m L O 22+= 9-3水平圆盘可绕铅直轴z 转动,如图所示,其对z 轴的转动惯量为z J 。
一质量为m 的质点,在圆盘上作匀速圆周运动,质点的速度为0v ,圆的半径为r ,圆心到盘中心的距离为l 。
开始运动时,质点在位置0M ,圆盘角速度为零。
求圆盘角速度ω与角ϕ间的关系,轴承摩擦不计。
9-4如图所示,质量为m 的滑块A ,可以在水平光滑槽中运动,具有刚性系数为k 的弹簧一端与滑块相连接,另一端固定。
杆AB 长度为l ,质量忽略不计,A 端与滑块A 铰接,B 端装有质量1m ,在铅直平面内可绕点A 旋转。
设在力偶M 作用下转动角速度ω为常数。
求滑块A 的运动微分方程。
t l m m m x m m kxωωsin 2111+=++9-5质量为m,半径为R的均质圆盘,置于质量为M的平板上,沿平板加一常力F。
设平板与地面间摩擦系数为f,平板与圆盘间的接触是足够粗糙的,求圆盘中心A点的加速度。
9-6均质实心圆柱体A 和薄铁环B 的质量均为m ,半径都等于r ,两者用杆AB 铰接,无滑动地沿斜面滚下,斜面与水平面的夹角为θ,如图所示。
如杆的质量忽略不计,求杆AB 的加速度和杆的内力。
θsin 74g a =; 9-7均质圆柱体A 和B 的质量均为m ,半径为r ,一绳缠在绕固定轴O 转动的圆柱A 上,绳的另一端绕在圆柱B 上,如图所示。