第十章+可行方向法
- 格式:pdf
- 大小:109.73 KB
- 文档页数:26




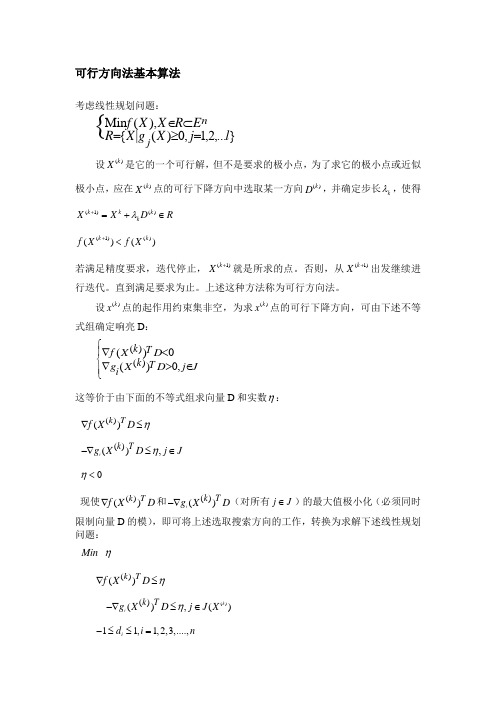
可行方向法基本算法考虑线性规划问题: Min (),{|()0,1,2,...}{n j f X X R E R X g X j l ∈⊂=≥= 设()k X 是它的一个可行解,但不是要求的极小点,为了求它的极小点或近似极小点,应在()k X 点的可行下降方向中选取某一方向()k D ,并确定步长k λ,使得 (1)()k k k k X X D R λ+=+∈(1)()()()k k f X f X +<若满足精度要求,迭代停止,(1)k X +就是所求的点。
否则,从(1)k X +出发继续进行迭代。
直到满足要求为止。
上述这种方法称为可行方向法。
设()k x 点的起作用约束集非空,为求()k x 点的可行下降方向,可由下述不等式组确定响亮D :()()()0()0,k T k T i f X D g X D j J ⎧⎪⎨⎪⎩∇<∇>∈ 这等价于由下面的不等式组求向量D 和实数η:()()k T f X D η∇≤()(),i k T g X D j J η-∇≤∈0η<现使()()k T f X D ∇和()()i k T g X D -∇(对所有j J ∈)的最大值极小化(必须同时限制向量D 的模),即可将上述选取搜索方向的工作,转换为求解下述线性规划问题:Min η()()k T f X D η∇≤()()(),()k i k T g X D j J X η-∇≤∈11,1,2,3,..i d i n -≤≤=式中(1,2,3,...,)i d i n =为向量D 的分量。
在上式中加入最后一个限制条件,位的是使该线性规划有有限最优解;由于我们的目的在于寻找搜索方向D ,只需知道D 的各分量的相对大小即可。
将上述线性规划的最优解记为()(,)k k D η,如果求出的0k η=,说明在()k X 点不存在可行下降方向,在()()k j g X ∇(此处()()k j J X ∈)线性无关的条件下,()k X 为一K-T 点,若解出0k η<,则得到可行下降方向()k D ,这就是我们所要的所搜方向。

最优化可行方向法最优化问题是数学中的一类重要问题,目标在于找到使得目标函数取得最大或最小值的变量取值。
可行方向法是一种常用的最优化算法,它通过在每个迭代步骤中确定一个可行方向,并将变量值沿该方向进行调整,逐步逼近最优解。
可行方向法的核心思想是从当前解的邻域中选择一个可以改进目标函数的方向。
具体而言,它通过计算目标函数的梯度(或是次梯度)来确定一个可行方向,并沿该方向对解进行调整。
这个过程可以反复迭代,直到满足终止条件为止。
在可行方向法中,选择合适的可行方向是一个关键问题。
一种常用的方法是梯度下降法,它使用目标函数的梯度方向作为可行方向,以减小目标函数的值。
另一种常用的方法是牛顿法,它使用目标函数的海森矩阵(Hessian Matrix)作为可行方向,以更快地逼近最优解。
可行方向法的具体步骤如下:1.初始化变量的取值。
2.计算目标函数在当前解的梯度或次梯度。
3.判断是否满足终止条件。
如果满足,结束迭代,输出当前解;否则,继续下面的步骤。
5.根据可行方向,计算变量的调整量。
6.更新变量的取值。
7.转到步骤2可行方向法的收敛性分析是一个重要的研究课题。
对于一般的最优化问题,如果目标函数是Lipschitz连续可微的,并且可行解集是非空、有界的,则可行方向法在有限步后可以找到一个近似最优解。
但对于非凸问题或非平滑问题,可行方向法的收敛性可能会有所不同。
除了梯度下降法和牛顿法外,可行方向法还有其他的变种,如共轭梯度法、拟牛顿法等。
这些方法在选择可行方向和调整变量值的方式上有所差别,但其基本思想仍然是寻找使目标函数得以改进的方向。
在实际应用中,可行方向法通常结合其他算法一起使用,以充分发挥各种算法的优势。
例如,可以使用可行方向法寻找一个大致的最优解,然后再使用更精确的算法对该解进行优化。
总之,可行方向法是一种重要的最优化方法,它通过选择合适的可行方向来逼近最优解。
尽管不同的变种方法有所差异,但它们的核心思想都是通过迭代调整变量值来逐步逼近最优解。
可行方向法摘要可行方向法是求解最优化问题的重要方法,在可行方向法求解过程中,一般需要构造一个求解可行下降方向的子问题,而可行方向法的不同取决于所采用的求解可行下降方向的子问题,它具有如下特点:迭代过程中所采用的搜索方向为可行方向,所产生的迭代点列是中在可行域内,目标函数值单调下降,由此可见,很多方法都可以归入可行方向法一类,本文主要介绍Frank-Wolf 方法。
一、问题形式min ().. 0f x Ax b s t x ≥⎧⎨≥⎩ (11.1)其中A 为m n ⨯矩阵,m b R ∈,n x R ∈。
记{},0,n D x Ax b x x R =≥≥∈并设()f x 一阶连续可微。
二、算法基本思想D 是一个凸多面体,任取0x D ∈,将()f x 在0x 处线性展开 000()()()()()T L f x f x f x x x f x ≈+∇-= 用min ().. 0L f x Ax b s t x ≥⎧⎨≥⎩ 或 0min ().. 0T f x xAx b s t x ∇≥⎧⎨≥⎩ (11.2)逼近原问题,这是一个线性规划问题,设0y D ∈是其最优解。
1)若000()()0T f x y x ∇-=,则0x 也是线性规划问题(11.2)的最优解,此时可证0x 为原问题的K-T 点。
2)若000()()0T f x y x ∇-≠,则由0y 是(11.2)的最优解,故必有0000()()T T f x y f x x ∇<∇从而 000()()0T f x y x ∇-<即00y x -为()f x 在0x 处的下降方向,沿此方向作有约束的一维搜索 00001min (())f x y x λλ≤≤+-设最佳步长因子为0λ,令100000000()(1)()x x y x y x D λλλ=+-=+-∈当λ充分小时100000001()min (())(())f x f x y x f x y x λλλ≤≤=+-≤+-00000()()()()()T f x f x y x o f x λλ=+∇-+< 用1x 取代0x ,重复以上计算过程。