基于MATLAB的曲柄滑块机构运动的仿真
- 格式:doc
- 大小:318.00 KB
- 文档页数:7
Crank Rocker Mechanism on Matlab Simulink 作者: 潘周光;冯士活
作者机构: 浙江工贸职业技术学院,浙江温州325003
出版物刊名: 浙江工贸职业技术学院学报
页码: 78-82页
主题词: Matlab/Simulink;曲柄摇块机构;仿真模型
摘要:用Matlab来进行机构运动、动力学仿真分析,有利于精确、简便、高效地实现机械传动设计。
文章应用Matlab对一种曲柄摇块机构的无级变速器进行运动学和动力学分析,推导了无级变速嚣各构件加速度关系的闭环矢量方程和所受力与力矩的齐次线性方程组,建立了机构的运动和动力仿真模型。
经Matlab/Simulink求解和动态仿真,结果表明:基于Matlab的机械传动设计。
能有效的获得机构的运动和动力特性,缩短开发周期。
湖南农业大学工学院课程设计说明书课程名称:题目名称:班级:20 级专业班姓名:学号:指导教师:评定成绩:教师评语:指导老师签名:20 年月日曲柄滑块结构运动仿真一、概述二、各零件的创建1.曲柄·设置工作目录·创建曲轴的文档·选择好以毫米为单位点击工具栏的→→选择FRONT平面为草绘平面,RIGHT面为参考平面,进入草绘状态。
利用拉伸,选择一个拉伸面为草绘平面,以TOP面为参考平面,进入草绘状态→在第二次拉伸的中间位置创建一个平面平行于RIGHT平面为DTM1,利用镜像工具,将第二次拉伸的部分以DTM1镜像,得到利用拉伸和旋转创建出轴的其他部位如图利用创建平面工具,利用图示位置关系创建出一平面DTM2利用拉伸,以DTM2为草绘平面,创建键槽特征利用倒角选择倒角边和数据再利用倒圆角,选择倒圆角半径和需要倒圆角的边点击保存完成曲轴的创建。
2.连杆以及其他零件利用如曲轴的步骤,创建连杆和其他零件,如下只做出零件完成图连杆上部分连杆下盖活塞上盖底座三、零件的装配·设置工作目录·创建活塞的文档·选择好以毫米为单位进入装配界面后,点击装配将工作目录中的“di”文件放置到界面中,选择接下来逐一装配工作目录中其他零件,装配结果如下图点击应用程序中→机构进入运动仿真界面四、运动仿真点击右边工具栏定义伺服电动机选择如图所示轴定义如下点击确定后,进入运动分析选择分析类型点击运行后,机构将进行运动分析利用回放将运动过程制成运动图片接着利用测量进行分析五、整体爆炸视图。
宝鸡文理学院学报(自然科学版)第39卷,第2期,第6366页,2019年6月Journal of Baoji University of Arts and Sciences(Natural Science)•Vol.39•No.2•pp.63-66•Jun.2019DOI:10.13467/旊i.jbuns.2019.02.002hup:///kcms/detail/61.1290.N.20190612.0952.002.html曲柄滑块机构的MATLAB优化设计与SolidWorks运动仿真"许海强,唐海平灣(宝鸡文理学院机械工程学院,陕西宝鸡721016)摘要:目的得到曲柄滑块机构的最优传力性能,验证其急回特性暎方法以机构运动学参数为设计变量,针对作业任务的要求,通过几何分析导出运动学参数必须满足的约束方程,提出量化机构力学性能的指标,建立机构的优化设计数学模型,给定滑块行程和行程速比系数,用MATLAB优化工具箱求解机构运动学参数的最优尺寸,用SolidWorks建模和运动学仿真暎结果得到了机构运动学参数的最优尺寸和运动学曲线,验证了偏置曲柄滑块机构的急回特性暎结论以MATLAB和SolidWorks 为设计平台进行机构设计与运动分析,具有简单可行和直观高效等优点,可以将其推广到工程实际中暎关键词:曲柄滑块机构;优化设计;M ATL AB;SolidWorks;运动分析中图分类号:TH111文献标志码:A文章编号:1007-1261(2019)02006304 MATLAB optimization design of crank-slider mechanism and SolidWorks motion simulationXU Hai-qiang,TANG Hai-ping灣(Inslilule of Mechanical Engineering•Baoji University of Arts and Sciences•Baoji721016•Shaanxi•China)Abstract:Purposes—To obtain the optimal force transfer performance of the crank-slider mechanism,and to verify its quick-return characteristics.Methods—According to the requirement,of job task,the constraint equation which kinematic parameters shall meet is deduced through geometric analysis with the kinematic parameters of the crank-slider mechanism as design variables,then the mechanic performance indicators of quantitative mechanisms is put forward,and a mathematical model of optimization design is established.When the slider stroke and travel speed ratio coefficient are given, MATLAB optimization toolbox is utilized to solve the optimal size of the kinematic parameters,and SolidWorks is used for modeling and kinematics simulation.Results—The optimal size and kinematic curves of kinematic parameters of the mechanism are obtained,and the quick-return characteristics of offset crank slider mechanism is verified.Conclusions—The mechanism design and motion analysis with MATLAB and SolidWorks as the design platform is simple,feasible,intuitive and efficient,so theycanbeextendedtoengineeringpractice.Key words:crank-slider mechanism;optimization design;MATLAB;SolidWorks;motion analysis曲柄滑块机构是一种平面连杆机构,通过曲柄的回转带动滑块做水平的往复移动,已广泛应用于空气压缩机、往复活塞式发动机等机械系统中暎偏置曲柄滑块机构具有急回特性,在设计机构时,为了保证传动系统的效率,必须对各构件的尺寸参数、位置参数等进行优化设计暎文献[1—收稿日期:2019-01-17,修回日期:2019-03-05,网络出版时间:201906-1209:52:52.作者简介:许海强(1994-),男,陕西宝鸡人,硕士研究生,研究方向:机电一体化技术.Email:xhq9425@ 通讯作者:唐海平C1976-),男,陕西宝鸡人,副教授,博士,硕士生导师,研究方向:材料物理化学.64宝鸡文理学院学报(自然科学版)2019年2]在给定行程速比系数K并且已知曲柄长度a,连杆长度S偏心距e中的任意一个量的情况下,通过解析法推导出其他任意2个未知量暎文献[3—5]通过辅助圆图解法设计了曲柄滑块机构暎但随着MATLAB等计算机优化软件的出现,这2种方法已经不再适用暎作为优化设计领域应用最广的软件之一,MATLAB不仅可以使用优化工具箱中的函数,还能通过算法编程实现相应的最优化设计[]暎偏置曲柄滑块机构的运动学分析是指在不考虑力的前提下,对机构的位移、速度、加速度随时间的变化进行仿真分析暎作为三维设计软件,SolidWorks不但能对机构进行三维建模,还可以使用Motion插件执行复杂机构的运动学和动力学仿真,通过动画、图表、曲线等反映机构的运动特性[]暎本文以曲柄滑块机构在作业任务中满足滑块行程H和行程速比系数K的前提下,以最小传动角Ymin作为目标函数,曲柄长度a,连杆长度b,偏心距e为设计变量暎首先用MATLAB软件进行优化设计,得到机构的最优尺寸参数,再用Solid-Works软件建立偏置曲柄滑块机构的三维模型,最后用Motion插件进行机构运动学仿真,并对仿真结果进行分析暎1优化设计的数学模型优化设计基于数学最优化理论,并使用计算机找到最优解暎在优化实际工程问题时,首先要建立数学模型,即确定设计变量、构造目标函数、选择约束条件;其次根据数学模型选择合适的最优化算法,最后编写程序上机电算择优[]暎1.1确定设计变量优化设计中需要调整和优选的参数称为设计变量。
曲柄滑块机构的优化设计及运动仿真学位论文曲柄滑块机构的优化设计及运动仿真目录目录...............................................................1 摘要............................................................... 第1章绪论........................................................ 选题的目的及意义............................................. 优化设计方法的概述........................................... 国内外的研究现状............................................ 主要研究内容............................................ 第2章曲柄滑块机构的受力分析......................................曲柄滑块机构的分类...........................................曲柄滑块机构的动力学特性.....................................曲柄滑块机构中运动学特性..................................... 第3章偏置式曲柄滑块机构的优化设计................................ 优化软件的介绍.............................................. MATLAB的发展历程和影响...................................MATLAB 在机构设计中的应用................................. 机构优化设计实例分析........................................ 设计目标的建立...........................................根据设计要求,确定约束条件................................利用MATLAB进行优化设计.................................... 编制优化程序.............................................. 程序运行结果及处理........................................ 对优化结果进行验证和分析................................. 第4章偏置曲柄滑块机构的运动学建模与仿真.......................... 偏置曲柄滑块机构运动特性建模................................ 仿真环境简介............................................. 机构的运动学建模........................................ 运动学仿真的实现.......................................... 函数的编制及初始参数的设定............................... 构建Simulink仿真框图.................................... 对仿真结果进行分析...................................... 总结...............................................................〔Toolboxs〕组成虽然该软件的初衷并不是为控制系统设计的,但它提供了强大的矩阵处理和绘图功能,可靠灵活且方便,非常适合现代控制理论的计算机辅助设计。
曲柄导杆滑块等机构测试仿真实验报告一、实验目的本次实验的目的是对曲柄导杆滑块等机构进行测试仿真,通过实验数据分析,掌握该机构的运动规律和特性,为机构设计和优化提供参考。
二、实验原理曲柄导杆滑块等机构是一种常见的机械传动装置,其主要由曲柄、连杆、导杆和滑块等部件组成。
在运动过程中,曲柄带动连杆运动,使导杆产生往复直线运动,从而驱动滑块完成工作。
三、实验器材本次实验所使用的器材包括:计算机、SolidWorks软件、Matlab软件。
四、实验步骤1.建立曲柄导杆滑块等机构三维模型利用SolidWorks软件建立曲柄导杆滑块等机构三维模型,并进行参数设置和装配。
2.进行运动分析利用SolidWorks Motion模块对该机构进行运动分析,并得出相关数据。
3.进行力学分析利用Matlab软件对该机构进行力学分析,并得出相关数据。
4.比较分析结果将两种分析方法得到的数据进行比较和分析,掌握该机构的运动规律和特性。
五、实验结果1.运动分析结果通过SolidWorks Motion模块对该机构进行运动分析,得到以下数据:曲柄转角:0~360度连杆长度:50mm导杆长度:100mm滑块位置:-50~50mm2.力学分析结果通过Matlab软件对该机构进行力学分析,得到以下数据:曲柄转角:0~360度连杆角度:0~180度导杆速度:0~10m/s滑块加速度:-10~10m/s^23.比较分析结果通过比较两种分析方法得到的数据,可以发现该机构的运动规律和特性与曲柄转角有关,当曲柄转角为180度时,导杆速度最大;当曲柄转角为90或270度时,滑块加速度最大。
此外,连杆角度与导杆速度呈正比关系。
六、实验结论通过本次实验可以得出以下结论:1.曲柄导杆滑块等机构的运动规律和特性与曲柄转角、连杆角度等参数有关。
2.该机构在不同工况下具有不同的性能表现,需要根据具体情况进行优化设计。
3.利用SolidWorks Motion模块和Matlab软件可以对该机构进行运动分析和力学分析,为机构设计和优化提供参考。
曲柄滑块机构的运动仿真赵晶群2150820041曲柄滑块机构有对心曲柄滑块、偏置曲柄滑块和偏心轮机构三种,如图: 图1对心曲柄滑块机构对心曲柄滑块:滑块上转动副中心的移动方位线通过曲柄旋转中心。
对心曲柄滑块,其极位角为0,形成速比系数为1,滑块在往返中平均速度相等。
图2 偏置曲柄滑块机构偏置曲柄滑块:滑块上转动副中心的移动方位线不通过曲柄旋转中心。
其极位角不为0,具有急回特征,常被用来节省空回行程的时间,以提高劳动生产率。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
活塞式发动机以滑块为主动件,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。
偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。
当曲柄长度很小时,通常把曲柄滑块做成偏心轮,这样不仅增大了轴颈的尺寸,提高偏心轮的强度和刚度,而且当轴颈位于中部时,还可以安装整体样式连杆,使得结构简化。
偏心轮机构可以实现非线性传动关系,且传动平稳,结构紧凑,动力平衡性好。
图3 偏心轮机构曲柄滑块的运动仿真分为以下四个步骤:(1)建立曲柄滑块机构所需构件:机架、曲柄、连杆、滑块(2)装配(3)运动仿真(4)运动分析一、建立曲柄滑块机构所需构件1、机架启动Pro/E,新建文件:选“零件”/“实体”,文件名jijia-1,以front 平面为草绘平面。
确定打钩,对称拉伸,拉伸距离为5.1、机架绘制一个直径为5mm的圆,拉伸长度为140mm拉出两个圆柱凸台:绘制一个直径为5mm的圆,拉伸距离为3mm和一个直径为3mm的同心圆,拉伸距离为3mm2、曲柄新建零件,名称为qubing-2,拉伸草绘,拉伸距离为33、连杆新建零件,名称liangan-3. 拉伸草绘,只在一边画圆拉伸孔,再在另一边拉伸凸台。
凸台与R2.5同心,高度3。
4、滑块新建零件,名称huakuai-4. 对称拉伸,拉伸长度为10绘制一个直径为3mm的圆,拉伸距离为10二、零件的装配(1)进入装配模式(2)装入基础元件单击工具栏中的【装配】按钮,弹出【打开】对话框,选择“jijia-1”,单击打开按钮,弹出【元件放置】操控面板。
基于MathCAD的曲柄滑块机构运动可视化研究针对曲柄滑块机构的运动可视化问题,利用MathCAD软件建立了机构的数学模型,实现了曲柄滑块机构静态可视化图形的绘制和动画演示,并给出了实现运动可视化的详细步骤。
实践证明,利用MathCAD实现曲柄滑块机构的可视化建模简单,动画实现方便高效。
为曲柄滑块机构的设计、优化等提供了参考依据,并可推广至其余机构的运动可视化实现。
标签:曲柄滑块机构;MathCAD;运动可视化曲柄滑块机构是由平面四杆机构演化而来的一种机构,其运动简图如图1所示,用于实现回转运动和移动之间的相互转化。
曲柄滑块机构应用广泛,如冲床、压缩机、往复活塞式发动机等,都是曲柄滑块机构的典型应用。
冲床、压缩机以曲柄为主动件,把整周转动转换为往复移动。
往复活塞式发动机把往复移动转换为不整周或整周的回转运动。
曲柄滑块机构的运动仿真对该机构的设计、优化等具有重要意义,而选择方便快捷的仿真工具是用户考虑的首要问题。
MathCAD是由Mathsoft公司推出的一套符合工业标准的专业计算软件。
其突出优点是既简便易用,又功能强大。
当输入数学公式、方程组或矩阵之后,计算机能直接给出结果,而无须去考虑中间计算过程,并可很方便地显示数学表格和图形,通过对图形结果的分析,使用户对问题的理解更加形象直观。
本文应用MathCAD软件提供的数学工具和自动绘图功能,直接输入数学公式,绘制曲柄滑块机构,并生成其运动动画,实现曲柄滑块机构的运动可视化。
1 曲柄滑块机构数学模型的建立2 曲柄滑块机构静态可视化图形的实现在MathCAD中,静态图形的创建方式是绘制若干点,而后连成线,点的形状和线条的线型可通过图形格式进行设置。
创建曲柄滑块机构静态可視化图形的步骤为:(1)在工作表的适当位置单击,确定图形显示位置;(2)输入x轴和y轴的坐标范围;(3)依次点击菜单栏及其下拉菜单中的“插入”—“图表”—“X-Y绘图”按钮,创建图形区域;(4)在图形区域以外单击,得到图2的曲柄滑块机构静态可视化图形。
基于MATLAB曲柄滑块机构运动学和动力学分析刘默【期刊名称】《《汽车实用技术》》【年(卷),期】2019(000)023【总页数】3页(P135-137)【关键词】曲柄滑块; 运动学; 动力学; MATLAB仿真【作者】刘默【作者单位】华北水利水电大学机械学院河南郑州 450045【正文语种】中文【中图分类】TH115前言为适应现代机械的高速化、轻量化、精密化和自动化,机械动力学在过去二三十年间得到了迅速的发展。
特别是在机械设计过程中,常常要求对原始设计参数随时修改以达到理想的运动和力学性能,这就是所谓的参数化设计思想。
而MATLAB (又称矩阵实验室)对数据处理的强大性和方便性,在MATLAB 环境下对该曲柄滑块机构进行运动分析,列矢量程表达式,建立矩阵方程,进行数值求解。
然后运动牛顿力学方法,对曲柄滑块进行动力学分析,从而实现对曲柄摇杆机构的动态仿真分析。
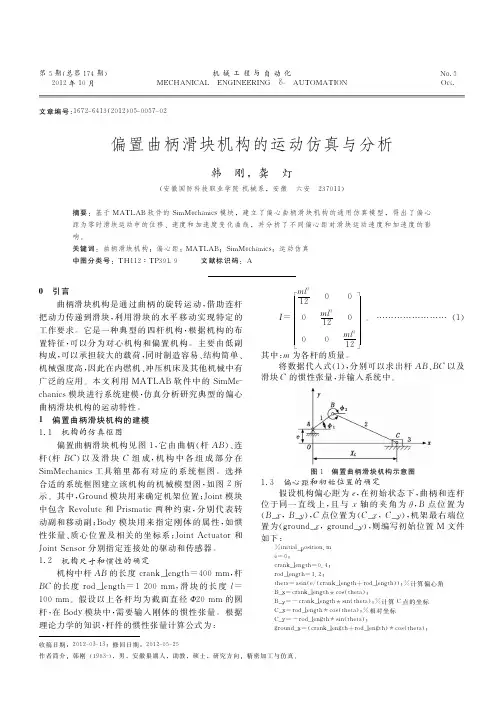
1 运动学求解建立曲柄滑块机构分析简图如图1所示,该机构由曲柄1、连杆2、滑块3组成,m1,m2,m3 分别为各组成部件质量。
R1,R2 分别为各部分长度,FAx,FAy,FBx,FBy 分别为各部件所受外力,MA 为驱动力矩,FCx,FCy 为滑动平面对滑块的支反力,各部件重力均作用在质心上。
考虑到各部件均为对称结构,质心与几何中心重合。
S 为滑块水平位移,θ1 为曲柄方向和水平面夹角,θ2 为连杆方向和水平面夹角。
图1 曲柄滑块机构向量模型根据向量图,把向量按z 和Y 坐标轴方向分解可得:其复数形式为:式(1)ri 和θi(i=1,2)分别为各杆长度和对x 轴正方向的角度。
根据欧拉公式,令式(1)各复数实部和复部分别相等,则:易得式(2)、(3)对时间求导,并注意到和得:ω1-曲柄角速度ω2-连杆角速度v3-滑块速度上式对时间再次求导,整理可得曲柄滑块机构的加速度方程为:式中a1-曲柄角加速度a2-曲柄角加速度a3-滑块加速度2 动力学求解假定曲柄做匀速转动,采用牛顿法对曲柄,连杆,滑块分别进行受力分析,如图示,并给出了水平方向的两个运动方程以及一个力矩方程,包括各点以及各质心的坐标。
基于Matlab的编烟机曲针部分的运动仿真分析李伟;刘泓滨;李海龙;李研【摘要】从某新开发的烤烟编烟机中的曲针运动特性分析入手,通过对曲针部分的曲柄连杆滑块机构的简化,判断机构运动的特性和极限位置.利用Matlab提供的机构运动仿真分析模块SimMechanics,建立编烟机曲针结构模型,并根据实际情况设置运动仿真的各个参数,并对所要研究的对象进行运动数据的测量,对编烟机曲针的预期运动进行了仿真验证,通过对SimMechanics计算出的数据进行分析,获得了符合预期运动特性的参数,为机构的设计提供了可靠的仿真依据,使设计更加完善.%According simplifying the twist needle's slider-crank mechanism in this paper, the mechanism's movement characteristics and limit position were studied. The analysis of the twist needle's movement characteristics in a new tobacco machine was taken into consideration. This study has made use of Matlab to establish the model of twist needle and set the parameters for the simulation of anticipated movement and has made an analysis through the SimMechanics' data, which provides the reliable digital evidence and the instruction for the following design. Meanwhile, it provides a reliable basis to make the design more perfect.【期刊名称】《新技术新工艺》【年(卷),期】2011(000)011【总页数】3页(P18-20)【关键词】Matlab;SimMechanics;运动仿真;编烟机曲针【作者】李伟;刘泓滨;李海龙;李研【作者单位】昆明理工大学机电工程学院,云南昆明650093;昆明理工大学机电工程学院,云南昆明650093;昆明理工大学机电工程学院,云南昆明650093;昆明理工大学机电工程学院,云南昆明650093【正文语种】中文【中图分类】TP391.9编烟机曲针是整个编烟机中最重要的结构之一,曲针的运动关系到整个机器最终设计的成败,预期设计时,曲针的2个钩线部分运动范围大于180°,这样曲针的钩线部分才能顺利钩到线。
matlab曲柄滑块机构课程设计一、课程目标知识目标:1. 理解并掌握曲柄滑块机构的基本原理与运动特性;2. 学会使用MATLAB软件进行曲柄滑块机构的运动仿真;3. 掌握运用MATLAB分析曲柄滑块机构的运动数据及性能参数。
技能目标:1. 能够运用所学知识,设计简单的曲柄滑块机构;2. 熟练操作MATLAB软件,进行曲柄滑块机构的运动分析与仿真;3. 能够通过MATLAB处理数据,优化曲柄滑块机构的设计。
情感态度价值观目标:1. 培养学生的团队协作精神,提高沟通与表达能力;2. 激发学生探索科学、技术问题的兴趣,培养创新意识和实践能力;3. 增强学生对机械工程领域的认识和热爱,提高专业认同感。
课程性质:本课程为机械工程专业课程设计,旨在通过实践操作,使学生掌握曲柄滑块机构的设计与分析方法。
学生特点:学生已具备一定的机械原理、力学和MATLAB基础,具有较强的动手能力和学习兴趣。
教学要求:结合实际工程案例,以实践为主,注重培养学生的实际操作能力、分析问题和解决问题的能力。
通过课程学习,使学生能够独立完成曲柄滑块机构的设计与分析任务。
二、教学内容1. 曲柄滑块机构原理及运动特性分析:- 曲柄滑块机构基本组成与工作原理- 曲柄滑块机构的运动学分析- 运动方程的建立及求解2. MATLAB软件在曲柄滑块机构中的应用:- MATLAB软件的基本操作与常用函数- MATLAB曲线拟合、数值计算等功能在曲柄滑块机构分析中的应用- MATLAB/Simulink环境下曲柄滑块机构的运动仿真3. 曲柄滑块机构设计及优化:- 设计原则与步骤- 参数化设计方法- 基于MATLAB的曲柄滑块机构设计优化4. 实践操作与案例分析:- 实际工程案例介绍与分析- 曲柄滑块机构设计及运动分析的实践操作- 数据处理与结果分析教学内容安排与进度:1. 第一周:曲柄滑块机构原理及运动特性分析2. 第二周:MATLAB软件在曲柄滑块机构中的应用3. 第三周:曲柄滑块机构设计及优化4. 第四周:实践操作与案例分析教材章节:1. 《机械原理》中曲柄滑块机构相关章节2. 《MATLAB基础与应用》中相关章节3. 《机械设计》中机构设计及优化相关章节教学内容注重理论与实践相结合,通过系统性的教学,使学生掌握曲柄滑块机构的设计与分析方法,并能够运用MATLAB软件进行实际操作。
实用数值方法(Matlab)小论文题目:基于Matlab实现曲柄摇杆机构的运动设计小组成员:毛晓雯学号:201202070607班级:机自6 班2014-2015(1)学期提交日期:2014年12月29日基于Matlab 实现曲柄摇杆机构的运动设计1 问题提出与数学模型的建立曲柄摇杆机构是铰链四杆机构中的一种,在实际工程应用中,该机构应用广泛,如缝纫机踏板机构、搅拌机机构等。
现要求设计一曲柄摇杆机构,能同时实现以下几个要素:1)为提高机构的急回特性,极位夹角θ应尽可能大(017θ<≤︒);2)为改善机构的传力性能,当该机构曲柄与连杆重叠共线时,最大压力角尽可能小(max 055α<≤︒);3)该摇杆摆角=60ψ∆︒。
1.1 设计变量的确定设1234,,,l l l l 分别为该四杆机构的杆长,考虑计算的方便性,令111l l =,()211lx l =,()312l x l =,()413l x l =,于是设计变量为()()()T X=123x x x ⎡⎤⎣⎦。
图1-1 曲柄摇杆机构简图1.2 目标函数的建立当曲柄摇杆机构的各杆长度确定后,该机构的摇杆摆角、最大压力角及极位夹角都会确定下来,即该机构的各项性能也能确定下来。
这里,将摇杆摆角=60ψ∆︒这个目标处理为无限接近60︒这个目标值,定义为一目标函数,求之同60︒之差的绝对值的最小值。
由图1-1及设计要求,可列出该设计的分目标函数。
因为23=C AD C AD θ∠-∠,由余弦定理可得极位夹角的目标函数:()()()()()()()()()()1222222()11321132arccos arccos 23112311f x x x x x x x x x x x θ=--+-++-⎡⎤⎡⎤⎣⎦⎣⎦=---+⎡⎤⎡⎤⎣⎦⎣⎦对于曲柄摇杆机构来说,当主动曲柄与机架共线的两位置之一处,压力角达到最大。
在这里,我们很容易知道当3B 点位于A 和D 之间的这种情况,压力角最大(如图1-2所示)。
基于Matlab/Simulink的槽轮机构间歇运动特性的分析与仿真摘要:将槽轮机构转换为倒置曲柄滑块机构,建立了槽轮机构的运动数学模型,利用Matlab计算了槽轮机构的运动参数并绘制了相应的动态曲线,该方法直观精确,提高了设计效率。
关键词:槽轮机构间歇运动Matlab/Simulink 运动特性Geneva mechanism based on Matlab/Simulink intermittent motion characteristics analysis and simulationAbstract :Converse geneva mechanism for inverted slider-crank mechanism,the geneva machanism motion mathematical model is established,using Matlab to calculate the dynamic movement parameters of the geneva mechanism and draw the corresponding curve,the method is accurate,intuitive improves the design efficiencyKey words:the geneva mechanism intermittent motion Matlab / Simulink movement characteristics0引言:槽轮机构能将主动件连续旋转运动转换成从动件有规律的运动和停歇,是实现周期性运动和停歇的典型机构。
槽轮机构的结构简单,外形尺寸小,效率高,并能较平稳地、间歇地进行传位,在现代机械设备中得到了广泛的应用,但因传动时尚存在柔性冲击,故常用于速度不高的场合。
本文将针对槽轮机构的间歇运动,使用Matlab软件中的仿真工具箱Simulink进行运动学仿真,通过仿真得到从槽轮的运动变化曲线,并对槽轮机构的运动特性进行分析。
基于MATLAB的曲柄滑块机构的动态静力分析
基于MATLAB的曲柄滑块机构的动态静力分析
李宗,姚锦涛刘康
【摘要】对于高速运动的曲柄滑块机构,由于构件的惯性力不能被忽略。
因此根据达朗贝尔原理,将惯性力计入静力平衡方程,从而求出为平衡静载荷和动载荷需在原动构件上施加力或力矩,以及各运动副中的反作用力。
根据力平衡及力矩平衡方程,求出平衡力矩。
采用matlab编程,求出摆动力、摆动力矩及平衡力矩。
【期刊名称】装备制造技术
【年(卷),期】2018(000)002
【总页数】3
【关键词】曲柄滑块机构;动态静力分析;matlab
0 引言
由于曲柄滑块机构之间是低副连接,在承受同样载荷的条件下压强较低,因而可以传递较大的动力,并且曲柄滑块机构加工制造比较容易,能获得较高的精度,所以在内燃机、冲床、空压机中有广泛的应用[1]。
文献[2]分别以matlab 和adams为研究平台,在matlab中建立数学模型对曲柄滑块机构进行仿真,在adams中将曲柄连杆机构进行柔性化对其进行仿真分析,并对两种仿真分析方法进行比较。
文献[3]应用adams完成了对曲柄滑块机构的运动学和动力学仿真。
文献[4]建立了以工作行程最小传动角最大为目标的多维变量优化数学模型,采用matlab优化工具箱对曲柄滑块机构进行优化设计。
文献[5]针对TH50型码垛机器人采用动态静力学方法将瞬时惯性力系转化为静力系,通过机器人整体及其子系统的力系平衡方程建立了机器人的动态静力学模型。
并用。
基于MATLAB的曲柄滑块机构动力分析张敬东;郑彬;陈俊男;李冶金【摘要】以某曲柄滑块机构为研究对象,当曲柄滑块机构在运行过程中,其运动质量所产生的往复、旋转惯性力和反转矩等,都会随着曲柄滑块机构的曲轴转角的变化而产生相应的变化.本文基于MATLAB软件平台,首先对曲柄滑块机构进行受力分析,并建立曲柄滑块机构的数学模型,在MATLAB中设置曲柄滑块机构各项参数进行动力学仿真,分析各杆件的运动状态,为曲柄滑块机构的运动分析提供一种新思路.【期刊名称】《攀枝花学院学报》【年(卷),期】2019(036)005【总页数】5页(P48-52)【关键词】曲柄滑块机构;MATLAB;数学模型;动力学仿真【作者】张敬东;郑彬;陈俊男;李冶金【作者单位】攀枝花学院交通与汽车工程学院,四川攀枝花617000;攀枝花学院交通与汽车工程学院,四川攀枝花617000;攀枝花学院交通与汽车工程学院,四川攀枝花617000;攀枝花学院交通与汽车工程学院,四川攀枝花617000【正文语种】中文【中图分类】TH1120 引言曲柄滑块机构在发动机运动过程中,既是传力件,又是运动件,所以它的工作可靠性是发动机工作可靠性的基础。
在以往的设计过程中,常常需要进行大量的数值计算以达到设计的需要,另一方面,也为了满足产品的使用性能,必须进行刚度、强度、可靠性及稳定性等方面的设计校核计算,为了满足校核计算,要对曲柄滑块机构进行动力学分析。
文献[1]以MATLAB为平台对曲柄连杆机构进行动力分析;文献[2]采用MATLAB对某凸轮机构进行可靠性设计;文献[3,4]为降低多缸发动机曲柄连杆机构的振动,根据多刚体动力学理论,建立了参数化的曲柄连杆机构动态仿真模型。
本文基于MATLAB软件,对曲柄滑块机构进行运动学和动力学分析,以便于直观清楚地了解曲柄滑块机构在运动过程中的受力变化,从而进行精确的计算,并绘制受力分析曲线图,对曲柄滑块机构的设计提供一种新思路。
基于MATLAB的曲柄滑
块机构运动的仿真
摘要:本文在曲柄滑块机构运动简图的基础上,对其数学运动模型进行分析,
用解析法计算曲柄的转角和角速度,及滑块的位移和速度,并用MATLAB软
件进行仿真。
1 引言
在机械传动系统中,曲柄滑块机构是一种常用的机械机构,它将曲柄的转动
转化为滑块在直线上的往复运动,是压气机、冲床、活塞式水泵等机械的主机构。
这里用解析法,并用MATLAB对其进行仿真。
2 曲柄滑块机构的解析法求解
曲柄滑块机构的运动简图如图1所示,在图1中,1L、2L和e分别为曲柄滑
块的曲柄、连杆和偏差,1、2分别为曲柄和连杆的转角,1•、2•分别为曲柄
和连杆的角速度,S为滑块的位移。
B
C
1
L
1
2
2
L
e
s
y
x
•
1
•
2
D
A
图1 曲柄滑块机构运动简图
设已知已知1L、2L、e、1和1•,求连杆的角位移2和角速度2•,以及滑
块的位移S和速度S•。
2.1 位移分析
按图1 中四边形ABCD的矢量方向有:
ABCD
将上式转化成幅值乘以角度的形式,得到如下等式:
12
12
ii
LeLeSie
(1)
分别取上式的虚部和实部,并在e前面乘N,N取值1或-1,用以表示滑
块在x轴的上方或者下方,得到下面两式:
1122
coscosLLS
(2)
1122
sinsinLLNb
(3)
整理上面两个公式得到S和2的计算公式:
1122
coscosSLL
(4)
11
2
2
sinarcsinNeLL
(5)
2.2 速度分析
将(1)式两边对时间求导得(6)式
12
12
12
ii
LieLieS•••
(6)
取(6)式的实部和虚部,整理得S•和2•的计算公式:
12
1
1
2
sin()cosSL••
(7)
1
11
2
22
coscosL
L
•
•
(8)
根据(7)式和(8)式即可得到滑块的速度及连杆的角速度。
2.3 实例分析及其MATLAB仿真
2.3.1 实例分析
下面对图2所示的曲柄滑块机构做具体分析。
B
1
r
1
2
2
r
s
y
x
1
2
A
C
图2 曲柄滑块机构简图
例中:1236,140rmmrmm,160/secd,求2,2,S和
S
•
。
建立图示的封闭矢量方程:
12
rrS
(9)
将上式分解到x与y轴坐标上,得到:
1122
1122
coscossinsin0rrSrr
(11)
得:
1122
1
2
2
coscosarcsinSrrrr
(11)
对(10)式对时间求导得:
111222
111222
sinsincoscos0rrSrr•
(12)
将上式用矩阵形式表示,令:
2
22111
22111
sin1sin[],[],[]cos0cosrrAXBrrS•
(13)
则(12)可表示为:AXB。从而可解出2和S•。
2.3.2 MATLAB仿真
Matlab仿真程序如下:
r1=36;%单位mm
r2=140;
omiga1=60;%单位d/sec
x11=1:720;
for i=1:720
x1(i)=i*pi/180;
%sin(x2(i))=-r1/r2*sin(x1(i));
x2(i)=asin(-r1/r2*sin(x1(i)));
x22(i)=x2(i)*180/pi;
r3(i)=r1*cos(x1(i))+r2*cos(x2(i));
B=[-r1*omiga1*sin(x1(i));r1*omiga1*cos(x1(i))];
A=[r2*sin(x2(i)) 1;-r2*cos(x2(i)) 0];
X=inv(A)*B;
omiga2(i)=X(1,1);
v3(i)=X(2,1);
end
plot(x11/60,0.5*r1*sin(x1));
xlabel('时间 t/sec')
ylabel('连杆质心在Y轴上位置/mm')
figure(2)
plot(x11/60,r3);
xlabel('时间 t/sec')
ylabel('滑块位移r3/mm')
figure(3)
plot(x11/60,omiga2);
xlabel('时间 t/sec')
ylabel('连杆角速度omiga2/rad/sec')
figure(4)
plot(x11/60,v3*pi/180);
xlabel('时间 t/sec')
ylabel('滑块速度v3/mm/sec')
图 4 MATLAB中连杆质心位置图
图5 MATLAB中连杆角速度图
图6 MATLAB中滑块位移图
图7 MATLAB中滑块速度图