西南交通大学_基于自动化技术的智能驾驶模拟汽车(陈然)
- 格式:doc
- 大小:1.11 MB
- 文档页数:6
西南交通大学研究生学位论文撰写规范研究生学位论文是研究生科学研究工作的全面总结,是描述其研究成果、代表其研究水平的重要学术文献资料,是申请和授予相应学位的基本依据。
学位论文撰写是研究生培养过程的基本训练之一,必须按照确定的规范认真执行。
指导教师应加强指导,严格把关。
论文撰写应符合国家及各专业部门制定的有关标准,符合汉语语法规范。
硕士和博士学位论文,除在字数、理论研究的深度及创新性成果等方面的要求不同外,对其撰写规范的要求基本一致。
1内容要求1.1 题目题目以简明的词语恰当、准确地反映论文最重要的特定内容,一般不超过25字。
题目通常由名词性短语构成,应尽量避免使用不常用缩略词、首字母缩写字、字符、代号和公式等。
如题目内容层次很多,难以简化时,可采用题目与副题目相结合的方法,其中副题目起补充、阐明题目的作用。
题目和副题目在整篇学位论文中的不同地方出现时,应保持一致。
1.2 西南交通大学学位论文版权使用授权书作者仔细核实授权书后签名,格式见附录3。
1.3声明博士学位论文:西南交通大学博士学位论文创新性声明,实例如附录4所示,作者需简明扼要提出博士学位论文的主要创新点,将创新性声明补充完整并签名。
硕士学位论文:西南交通大学硕士学位论文主要工作(贡献)声明,实例如附录5所示,作者需简明扼要提出本人在硕士学位论文中所完成的主要工作或贡献并签名。
1.4 摘要与关键词1.4.1 摘要摘要是论文内容的简要陈述,是一篇具有独立性和完整性的短文,摘要应具有独立性和自含性,即不阅读论文的全文,就能获得必要的信息。
摘要的内容应包含与论文等同量的主要信息,供读者确定有无必要阅读全文,也可供二次文献采用。
摘要一般应说明研究工作目的、方法、结果和结论等,重点是结果和结论。
1.4.2 关键词关键词是供检索用的主题词条,应采用能覆盖论文主要内容的通用技术词条(参照相应的技术术语标准)。
关键词一般列3~8个,用显著的字符号另起一行,排在摘要的下方。
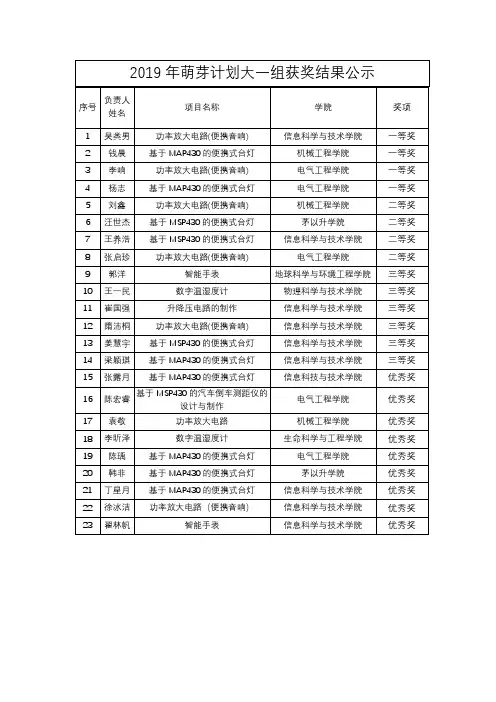
2001年全国大学生电子设计竞赛一等奖自动程控电动小汽车
的设计
宋新兵;徐源;周丛明
【期刊名称】《电子世界》
【年(卷),期】2002(000)004
【摘要】@@ 本系统采用微处理器(单片机89C52、2051)实现小汽车的自动往返并达到时间的精确控制、起始位置的准确定位.信号检测部分采用抗干扰能力强的光电检测电路及数字接口;执行机构采用脉宽调制(PWM)技术实现对电机的精确控制;扩展电路实现对距离、时间、速度的检测与显示.软件部分采用汇编及C语言进行模块化编程使系统更加完善与合理.同时,对抗干扰方面,我们采用硬件抗干扰和软件抗干扰相结合的措施,使系统运行非常稳定.
【总页数】3页(P55-56,77)
【作者】宋新兵;徐源;周丛明
【作者单位】河南南阳理工学院电子与电气工程系;河南南阳理工学院电子与电气工程系;河南南阳理工学院电子与电气工程系
【正文语种】中文
【中图分类】TP2
【相关文献】
1.2001年全国大学生电子设计竞赛一等奖基于DDS技术的任意波形发生器 [J], 徐彬;谭征;袁蕾;杨晖
2.2001年全国大学生电子设计竞赛一等奖简易数字存储示波器 [J], 牟伟华;周资伟;朱祥维
3.2001年全国大学生电子设计竞赛一等奖基于单片机的电动模型汽车自动控制[J], 曾非;蒙贤著;黄远航
4.2001年全国大学生电子设计竞赛一等奖自动往返小汽车 [J], 刘野;高迪;鄢毅阳
5.2001年全国大学生电子设计竞赛一等奖高效率音频功率放大器 [J], 申华;张志博;苑铁成
因版权原因,仅展示原文概要,查看原文内容请购买。
自动驾驶模型选择和集成策略研究第一章引言1.1 研究背景自动驾驶技术是当今智能交通领域的热点话题,具有广阔的应用前景和深远的影响。
自动驾驶模型的选择和集成策略是实现自动驾驶车辆安全可靠行驶的关键因素之一。
本章将介绍自动驾驶技术的发展现状以及面临的挑战,探讨自动驾驶模型选择和集成策略的研究意义。
1.2 研究目的本文旨在系统研究自动驾驶模型选择和集成策略,提出高效有效的方法来选择最优模型和集成策略,以实现自动驾驶系统的高性能和安全可靠性。
第二章自动驾驶模型选择方法研究2.1 自动驾驶模型评估指标在选择自动驾驶模型之前,需要定义评估指标来衡量模型的性能。
本节将介绍常用的自动驾驶模型评估指标,如精度、鲁棒性、实时性等,并探讨各指标的权重设置方法。
2.2 自动驾驶模型选择算法本节将介绍常见的自动驾驶模型选择算法,包括基于统计学方法的贝叶斯优化算法、基于遗传算法的优化算法等。
通过比较不同算法的优劣,找出适合自动驾驶模型选择的最佳算法。
第三章自动驾驶模型集成策略研究3.1 自动驾驶模型集成技术自动驾驶系统通常由多个模型组成,如感知模型、决策模型和控制模型等。
本节将介绍常见的自动驾驶模型集成技术,包括投票方法、加权融合方法和堆叠方法等,探讨各方法的优缺点和适用场景。
3.2 自动驾驶模型集成算法本节将介绍基于机器学习的自动驾驶模型集成算法,如集成学习、集成规则等。
探讨不同算法在模型集成中的应用和效果,并比较其稳定性和鲁棒性。
第四章自动驾驶模型选择和集成案例研究4.1 数据集介绍本节将介绍用于自动驾驶模型选择和集成案例研究的数据集,包括数据来源、数据规模和数据特征等。
4.2 实验设置和结果分析本节将详细描述自动驾驶模型选择和集成的实验设置,并分析实验结果。
通过对比不同模型和集成策略的性能指标,评估其在不同场景下的适用性。
第五章自动驾驶模型选择和集成策略的未来发展5.1 研究现状与问题本节将总结当前自动驾驶模型选择和集成策略研究的现状,指出存在的问题和挑战,如模型性能评估标准缺乏统一、模型集成算法缺乏实用性等。
凯程考研集训营,为学生引路,为学员服务!
第 1 页 共 1 页 考研专业院校:西南交通大学机械
早在1919年,西南交通大学的前身——唐山交通大学就成立了机械工程系,开展机械工程教育。
在长期的办学历程中,形成了“严谨治学,刻苦钻研”的优良学风,西南交通大学的机械工程教育得到了长足的发展,由最初的机械工程系壮大为今天的机械工程学院。
同时也为国家培养了大批高级机械工程科技人才。
我国著名机车车辆专家、中国科学院院士、中国工程院院士沈志云教授就是其中的杰出代表。
机械工程学院依托“牵引动力国家重点实验室”,具有“机械工程一级学科”博士学位授予权和“机械工程博士后科研流动站”。
我院已形成了以机械工程学科为龙头的相关学科群,包括:机械制造及其自动化,机械电子工程,机械设计及理论,车辆工程,载运工具运用工程,供热、供燃气、通风及空调工程(以上 6个二级学科均具有博士学位授予权),测试计量技术及仪器,动力工程及机械等。
最近,经国务院学位办备案,我校在机械工程一级学科下自主设置的“城市轨道交通技术与装备”和“驱动技术与智能系统”两个二级学科也具有博士学位授予权。
目前,学院共有10个二级学科,其中机械设计及理论,车辆工程和载运工具运用工程3个学科设有长江学者奖励计划特聘教授岗,并均有优秀青年学者上岗。
小提示:目前本科生就业市场竞争激烈,就业主体是研究生,在如今考研竞争日渐激烈的情况下,我们想要不在考研大军中变成分母,我们需要:早开始+好计划+正确的复习思路+好的辅导班(如果经济条件允许的情况下)。
2017考研开始准备复习啦,早起的鸟儿有虫吃,一分耕耘一分收获。
加油!。

西南交通大学2007年硕士生导师上岗遴选通过人员名单单位:机械工程学位分委会总计:120人序号姓名学科、专业研究方向所在单位出生年月职称是否首次招生1 许明恒机械电子工程机电一体化系统控制及CAD 机械工程学院1947.9 教授否2 邓斌机械电子工程、驱动技术与智能系统新型驱动技术、智能控制系统、机电液一体化控制及仿真机械工程学院1964.9 教授否3 于兰英机械电子工程、驱动技术与智能系统新型驱动技术、智能控制系统、纳米加工定位技术机械工程学院1964.4 副教授否4 柯坚机械电子工程、驱动技术与智能系统新型驱动技术、智能控制系统及应用、机电液一体化控制及仿真、燃料电池、纳米加工定位技术机械工程学院1963.7 教授否5 秦剑机械电子工程、驱动技术与智能系统新型驱动技术、智能控制系统、纳米加工定位技术机械工程学院1964.1 高级工程师否6 王国志机械电子工程、驱动技术与智能系统新型驱动技术、智能控制系统机械工程学院1969.6 副教授否7 胡汉春机械电子工程、城市轨道交通技术与装备、车辆工程机电设备微机控制及仿真、城市轨道车辆传动与控制、车辆设备微机测控技术、机车传动与控制机械工程学院1954.1 教授否8 王月明车辆工程、城市轨道交通技术与装备、机械电子工程传动控制、主动半主动控制、列车运行控制与仿真、机电设备微机控制与仿真机械工程学院1960.9 教授否9 米彩盈车辆工程、城市轨道交通技术与装备车辆结构、强度及可靠性机械工程学院1965.3 教授否10 杨美传车辆工程车辆设计理论、车辆空调机械工程学院1959.6 副教授否11 王伯铭车辆工程、机械电子工程城轨车辆工程及转向架新技术、机电一体化测控技术机械工程学院1962.12 副教授否12 肖世德机械电子工程CAD/CAPP/CAM与CIMS智能机电系统设计与控制机械工程学院1967.4 教授否13 孟文机械电子工程机械设备微机数字控制及仿真、智能控制技术及应用、单片机监控与嵌入式系统应用、机械装备局域网控制系统及仿真机械工程学院1966.6 副教授否14 周伦机械电子工程智能机电控制技术与应用机械工程学院1956.12 副教授否15 杜海若机械制造及其自动化数据总线、工程机械、微机控制系统机械工程学院1955.1 副教授否16 管会生机械制造及其自动化工程机械三维设计、TBM和盾构机械研究机械工程学院1961.11 副教授否17 黄松和机械设计及理论控制及仿真、CAD技术、工程机械理论机械工程学院1961.12 副教授否18 王培俊机械设计及理论虚拟现实技术和异地协同设计技术机械工程学院1962.7 教授否19 陆天炜机械设计及理论机械设计理论及方法、摩擦学机械工程学院1962.12 副教授是20 潘亚嘉机械设计及理论机械CAD/优化及可靠性设计机械工程学院1965.1 副教授是21 丁国富机械制造及其自动化虚拟样机/虚拟制造开放式数控、数字化设计制造、可视化计算机仿真机械工程学院1972.2 教授否号年月次招生22 龚邦明机械制造及其自动化机械制造自动化装备设计与控制、数控系统及装置机械工程学院1955.12 副教授否23 闫开印机械制造及其自动化虚拟样机/虚拟制造先进制造技术机械工程学院1961.8 研究员否24 马术文机械制造及其自动化CAD/CAM技术CAPP技术、数控技术机械工程学院1968.9 副教授否25 杨坤怡机械制造及其自动化网络制造、虚拟制造及高速切削机械工程学院1958.7 副教授否26 宋小欣机械制造及其自动化制造系统自动化及仿真、微型制造机械工程学院1963.02 副教授是27 董大伟动力机械及工程、车辆工程计算机辅助汽车设计汽车发动机故障诊断与专家系统热能动力机械强度、可靠性及故障诊断机械工程学院1963.4 教授否28 李人宪动力机械及工程内燃机性能研究、动力机械结构强度机械工程学院1954.9 教授否29 闫兵动力机械及工程、车辆工程动力机械故障诊断振动、躁声分析与控制机械工程学院1964.11 副教授否30 周斌动力机械及工程、车辆工程、机械设计及理论内燃机燃烧与排放控制、内燃机性能模拟与虚拟实验技术、汽车排气污染与控制、安全技术与安全评价机械工程学院1962.2 教授否31 万里翔车辆工程汽车的节能与环保技术、计算机辅助汽车设计机械工程学院1965.2 副教授否32 丁渭平车辆工程汽车系统动力学车辆振动、躁声分析与控制机械工程学院1968.8 教授否33 施富强机械设计及理论、测试计量技术及仪器安全工程机械工程学院1961.12高级工程师是34 柴俭机械设计及理论、测试计量技术及仪器安全工程机械工程学院1963.5高级工程师是35 李柏林机械设计及理论数字化设计、机构学、优化技术与设计自动化机械工程学院1962.1 教授否36 谢进机械设计及理论机构学、设计自动化机械工程学院1959.7 教授否37 李立机械设计及理论、机械电子工程、驱动技术与智能系统机构学、机器人学、设计自动化机械工程学院1965.6 教授否38 周仲荣机械设计及理论摩擦学机械工程学院1965.8 教授否39 刘启跃机械设计及理论摩擦学机械工程学院1964.5 教授否40 朱旻昊机械设计及理论摩擦学表面工程机械工程学院1968.7 教授否41 任平弟机械设计及理论微动腐蚀机械工程学院1960.1 教授否42 郑靖机械设计及理论生物摩擦学机械工程学院1974.2 副研究员否43 陈光雄机械设计及理论摩擦学机械工程学院1962.3 教授否44 钱林茂机械设计及理论纳米摩擦学、微机械学机械工程学院1971.6 教授否45 傅攀测试计量技术及仪器智能化状态监测及故障诊断机械工程学院1961.3 教授否号年月次招生46 王雪梅测试计量技术及仪器测控技术及系统机械工程学院1968.12 副教授否47 伍川辉测试计量技术及仪器测控技术及仪器机械工程学院1964.11 副教授否48 苏燕辰测试计量技术及仪器测控仪器与测控系统机械工程学院1964.2 副教授否49 陈春俊测试计量技术及仪器微机测控技术及PC仪器机械工程学院1967.7 副教授否50 张洁测试计量技术及仪器自动测试技术与PC仪器研究机械工程学院1975.4 副教授否51 张艳荣测试计量技术及仪器自动测试系统机械工程学院1971.11 副教授是52 秦萍供热、供燃气、通风及空调工程动力机械及工程节能空调、内燃机故障诊断机械工程学院1958.4 教授否53 余南阳供热、供燃气、通风及空调工程建筑节能技术、建筑节能评价机械工程学院1961.2 教授否54 冯炼供热、供燃气、通风及空调工程地铁隧道通风及环境控制机械工程学院1964.11 教授否55 雷波供热、供燃气、通风及空调工程通风、空调机械工程学院1961.5 教授否56 许志浩供热、供燃气、通风及空调工程空调设备节能机械工程学院1956.7 副教授否57 邓志辉供热、供燃气、通风及空调工程暖通空调节能及地铁环控系统机械工程学院1962.5 副教授否58 敬成君供热、供燃气、通风及空调工程热流体流动及稳定性机械工程学院1965.1 教授否59 毕海权供热、供燃气、通风及空调工程建筑节能技术、隧道通风及火灾研究、空气动力学机械工程学院1974.12 副研究员是60 田怀文机械设计及理论计算机图学及CAD、计算机辅助概念设计机械工程学院1965.11 教授否61 杜宏明机械电子工程CAD及图形图像处理机械工程学院1956.4 副教授否62 陈天星机械电子工程计算机图学、可视化、动画仿真、VR企业信息化、CAD、PDM、ERP机械工程学院1968.3 副教授否63 曾明华机械设计及理论工程图学、机械CAD、CAI 机械工程学院1965.1 副教授否64 程文明机械设计及理论、机械电子工程数字物流与智能技术物流信息技术与设备控制物流技术与设备、工业工程、智能优化与动态仿真机械工程学院1963.6 教授否65 许志沛机械设计及理论起重与工程机械开发与实验、液压传动设计优化、搬运机械安全技术检验机械工程学院1959.6 副教授否66 王少华机械设计及理论可靠性、结构分析、物流技术机械工程学院1963.8 教授否67 张仲鹏机械设计及理论、机械电子工程机械可靠性工程与管理、工业工程、机械结构强度与CAD、物流技术与设备机械工程学院1955.3 教授否68 于兰峰机械设计及理论、机械电子工程机械CAE、物流装备设计方法及理论机械工程学院1964.3 副教授否69 吴晓机械设计及理论、机械电子工程机械CAE、现代设计理论与方法、计算机仿真、物流装备与技术机械工程学院1970.01 副教授是号年月次招生70 付茂海车辆工程、城市轨道交通技术与装备车辆设计及理论、城市轨道交通车辆设计及理论机械工程学院1965.9 研究员否71 卜继玲车辆工程、城市轨道交通技术与装备车辆设计及理论城市轨道交通车辆结构、强度及可靠性机械工程学院1974.1 副教授否72 李芾车辆工程、城市轨道交通技术与装备车辆设计及理论、城市轨道交通车辆设计及理论机械工程学院1956.9 教授否73 倪文波车辆工程机车车辆性能主动控制、制动技术机械工程学院1969.3 教授否74 黄运华车辆工程、城市轨道交通技术与装备车辆设计及理论、城市轨道交通车辆设计及理论机械工程学院1973.7 副研究员否75 王俊勇车辆工程机车车辆制动机械工程学院1965.4 教授级高工是76 吴向东机械电子工程流体传动与控制机械工程学院1966.8 副教授否77 刘建新车辆工程、载运工具运用工程机车车辆动力学结构与强度研究生院1965.1 教授否78 濮德璋机械电子工程、机械设计及理论数字物流与智能技术、物流信息技术与设备控制、物流技术与设备、工业工程、智能优化与动态仿真机械工程学院1954.9 研究员否79 曾佑文机械设计及理论高温超导储能及应用工程科学研究院1949.6 教授否80 潘亦苏信息化制造工程加工过程数值仿真工程科学研究院1961.1 教授否81 杨帆信息化制造工程电子封装可靠性分析、材料在微纳米尺度的行为工程科学研究院1963.2 副教授否82 王家素信息化制造工程超导体的电磁特性、超导轴承和飞轮储能、超导磁悬浮动力学、超导磁悬浮理论与技术、超导磁悬浮应用、高温超导磁悬浮列车系统工程科学研究院1944.5 高工否83 单奇信息化制造工程现场总线技术在制造过程控制中的应用、制造过程检测技术及应用工程科学研究院1965.8 副教授否84 冯全源信息化制造工程制造过程数值仿真与虚拟现实、制造过程中的射频身份识别、制造业中的芯片设计及加密技术、嵌入式系统研究、网络化制造系统工程科学研究院1963.7 教授否85 何枫信息化制造工程嵌入是操作系统、网络数据库技术、.网络信息系统、无线传感器网络操作系统、智能CAD工程科学研究院1955.12 高工否86 王素玉信息化制造工程超导体的电磁特性、超导轴承和飞轮储能、超导磁悬浮动力学、超导磁悬浮理论与技术、超导磁悬浮应用、高温超导磁悬浮列车系统机械工程学院1944.7 研究员否87 郭俊城市轨道交通技术与装备城市轨道车辆设计与理论科研处1972.12 副研究员否88 张耀平车辆工程、机械设计制造及其自动化、检测技术与自动化装置真空管道高速磁浮交通、物流新技术交通运输学院真空管道运输研究所1969.04 副教授否89 赵勇城市轨道交通技术与装备城市轨道车辆新技术超导研究开发中心1960.5 教授否号年月次招生90 张文桂机械设计及理论控制及仿真、CAD技术、工程机械理论实验室及设备管理处,机械学院1958.12 研究员是91 翟婉明车辆工程、载运工具运用工程铁路大系统动力学理论、仿真机车车辆运行安全轨道交通减振降噪技术牵引动力国家重点实验室1963.8 教授否92 赵春发车辆工程、载运工具运用工程磁浮列车系统动力学、真空管道磁浮交通技术牵引动力国家重点实验室1973.1 副研究员否93 蔡成标车辆工程、载运工具运用工程车-线-桥结构振动、轨道结构振动牵引动力国家重点实验室1963.5 研究员否94 王开云车辆工程、载运工具运用工程车辆—轨道耦合动力学牵引动力国家重点实验室1974.7 副研究员否95 张卫华载运工具运用工程轨道车辆设计、动力学及控制弓网系统动力学牵引动力国家重点实验室1961.4 教授否96 戴焕云载运工具运用工程车辆动态模拟及计算机仿真、车辆系统动力学及控制、城市轨道车辆设计牵引动力国家重点实验室1966.3 教授否97 邬平波载运工具运用工程、信息化制造工程高速列车系统动力学及疲劳强度、城轨车辆设计与分析、模拟仿真与虚拟设计、疲劳可靠性设计、拟实制造加工技术牵引动力国家重点实验室1968.8 研究员否98 池茂儒载运工具运用工程城市轻轨车辆动力学、高速列车系统动力学牵引动力国家重点实验室1973.1 高工否99 曾京载运工具运用工程、信息化制造工程车辆动态模拟及计算仿真、高速列车系统动力学、模拟仿真与虚拟设计、拟实制造与成形加工技术、现代死规矩方法学牵引动力国家重点实验室1963.9 教授否100 鲁连涛载运工具运用工程金属材料的疲劳与断裂、焊接结构的疲劳可靠性牵引动力国家重点实验室1965.1 研究员否101 金学松载运工具运用工程机车车辆/轨道动力学轮轨关系牵引动力国家重点实验室1956.9 教授否102 张立民载运工具运用工程结构健康与安全监测;振动控制牵引动力国家重点实验室1960.1 研究员否103 张继业载运工具运用工程车辆动力学与控制、减振降噪、智能交通牵引动力国家重点实验室1965.6 教授否104 赵永翔载运工具运用工程结构可靠性、寿命预测、安全状态评定牵引动力国家重点实验室1963.2 教授否105 陈建政载运工具运用工程、精密仪器及机械检测技术、故障诊断嵌入式系统与无线传咸网络牵引动力国家重点实验室1968.2 副研究员否106 吴学杰载运工具运用工程、精密仪器及机械计算机测控技术、机车车辆动态模拟技术、控制理论与控制工程牵引动力国家重点实验室1964.11 研究员否107 林建辉载运工具运用工程、测试计量技术及仪器检测技术、故障诊断、测控仪器与测控系统牵引动力国家重点实验室1964.12 教授否108 周文祥载运工具运用工程、精密仪器及机械轨道车辆的转向控制、轮轨几何状态检测技术牵引动力国家重点实验室1963.11 研究员否109 肖守讷车辆工程机车车辆及磁悬浮车辆结构设计及理论、强度分析、疲劳寿命预测、可靠性研究牵引动力国家重点实验室1964.6 研究员否号年月次招生110 陈清车辆工程机车动力学牵引动力国家重点实验室1962.12 研究员否111 陈康车辆工程轨道车辆设计及理论、车辆动力性能的主动控制、高速列车系统动力学仿真牵引动力国家重点实验室1964.11 副教授否112 王开文车辆工程车辆系统动力学牵引动力国家重点实验室1945.4 教授否113 罗赟车辆工程机械多体系统仿真、高速列车系统动力学仿真牵引动力国家重点实验室1967.1 副教授否114 张开林车辆工程结构疲劳强度与可靠性、车辆动力性能主动控制牵引动力国家重点实验室1967.6 副研究员否115 王自力车辆工程车辆运行大系统动力学理论、仿真及应用车辆运行安全监控技术牵引动力国家重点实验室1963.9 副教授否116 钟文生车辆工程机车车辆设计及理论牵引动力国家重点实验室1968.3 副研究员否117 肖绯雄车辆工程车辆结构强度及疲劳寿命预测、车辆运行安全监控技术牵引动力国家重点实验室1963.8 副教授否118 黄志辉车辆工程轨道车辆设计及理论、现代城市轨道交通车辆、机械多体系统仿真牵引动力国家重点实验室1966.6 研究员否119 张红军车辆工程城市轨道车辆设计及理论牵引动力国家重点实验室1950.4 教授否120 罗世辉车辆工程机械多体系统仿真牵引动力国家重点实验室1964.4 教授否。
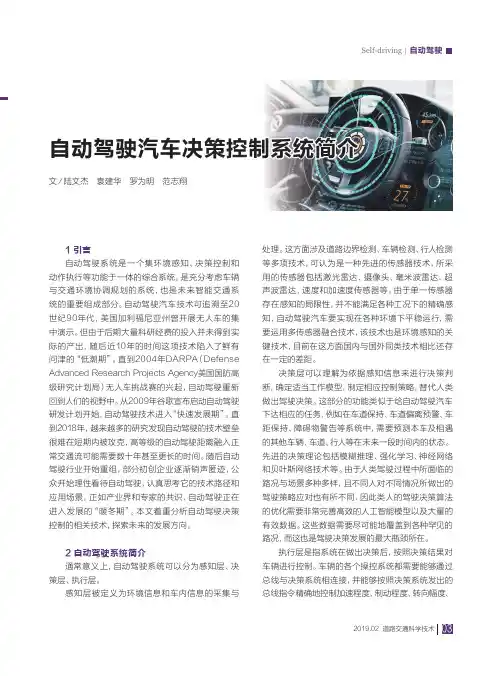
自动驾驶汽车决策控制系统简介文/陆文杰 袁建华 罗为明 范志翔1 引言自动驾驶系统是一个集环境感知、决策控制和动作执行等功能于一体的综合系统,是充分考虑车辆与交通环境协调规划的系统,也是未来智能交通系统的重要组成部分。
自动驾驶汽车技术可追溯至20世纪90年代,美国加利福尼亚州曾开展无人车的集中演示。
但由于后期大量科研经费的投入并未得到实际的产出,随后近10年的时间这项技术陷入了鲜有问津的“低潮期”。
直到2004年DARPA (Defense Advanced Research Projects Agency美国国防高级研究计划局)无人车挑战赛的兴起,自动驾驶重新回到人们的视野中。
从2009年谷歌宣布启动自动驾驶研发计划开始,自动驾驶技术进入“快速发展期”。
直到2018年,越来越多的研究发现自动驾驶的技术壁垒很难在短期内被攻克,高等级的自动驾驶距离融入正常交通流可能需要数十年甚至更长的时间。
随后自动驾驶行业开始重组,部分初创企业逐渐销声匿迹,公众开始理性看待自动驾驶,认真思考它的技术路径和应用场景,正如产业界和专家的共识,自动驾驶正在进入发展的“暖冬期”。
本文着重分析自动驾驶决策控制的相关技术,探索未来的发展方向。
2 自动驾驶系统简介通常意义上,自动驾驶系统可以分为感知层、决策层、执行层。
感知层被定义为环境信息和车内信息的采集与处理。
这方面涉及道路边界检测、车辆检测、行人检测等多项技术,可认为是一种先进的传感器技术,所采用的传感器包括激光雷达、摄像头、毫米波雷达、超声波雷达、速度和加速度传感器等。
由于单一传感器存在感知的局限性,并不能满足各种工况下的精确感知,自动驾驶汽车要实现在各种环境下平稳运行,需要运用多传感器融合技术,该技术也是环境感知的关键技术,目前在这方面国内与国外同类技术相比还存在一定的差距。
决策层可以理解为依据感知信息来进行决策判断,确定适当工作模型,制定相应控制策略,替代人类做出驾驶决策。
2023年智能车辆工程专业考研院校智能车辆工程专业是一门交叉学科,它集合了机械工程、计算机科学、电子信息技术、控制系统等多个学科知识,旨在培养具有深厚的理论基础和实践能力的高素质智能车辆工程人才。
以下是我对该专业考研院校的介绍。
1. 北京理工大学北京理工大学是一所以工为主、理工科为优势、多学科协调发展的理工科大学,也是国内最早开设智能车辆工程专业的高校。
该校的智能车辆工程专业在国内首批获得专业硕士学位授权单位,同时该校的智能车辆工程实验室也是国内最早成立且实力最强的智能车辆实验室之一。
该校的智能车辆工程课程设置完整,师资力量雄厚,授课内容涵盖车辆工程、智能控制、电子信息技术、通信网络等多个方面,获得了广大学子的青睐。
2. 同济大学同济大学是一所理工科综合性大学,历史源远流长,享有“华东MIT”之称,其智能车辆工程专业也备受关注。
该校的智能车辆工程专业以“准确计算,智能控制,可靠失效,优化设计”为教学特色,通过理论和实践相结合的教学方式,培养了大量具有扎实理论基础和丰富实践经验的高素质人才。
该校的学生团队在2015年的F1全球学生赛中获得了优异成绩,实现了中国智能车辆工程专业的代表作品。
3. 上海交通大学上海交通大学是一所综合性研究型大学,也是国内高水平研究型大学之一。
该校的智能车辆工程专业是由车辆与运载学院共同打造的一门新兴交叉学科,目前是国内少有的开设该专业的高校之一。
该校的智能车辆工程专业教学内容涵盖了多个方面,如车辆工程、自动控制、信号处理、计算机应用等,课程设置完善,实践经验丰富,教学质量优秀。
同时还与国内著名的车企建立了紧密的合作关系,为学生提供实践机会。
4. 南京航空航天大学南京航空航天大学是一所以航空航天、工程技术为主的多学科综合性大学,该校的智能车辆工程专业更是具有突出优势。
该校智能车辆工程专业是服务于现代车辆制造业和智能交通系统研究的高水平创新性专业,强调对智能化信号处理、人工智能技术的深入研究和应用。
“卓越工程师教育培养计划”自动化(交通信息工程及控制)专业(本科部分)二〇一一年三月目录一培养目标 (1)二培养标准 (3)三知识能力体系及标准实现矩阵 (6)(一)知识能力体系 (6)(二)课程整合 (12)(三)课程体系及构成 (13)(四)标准实现矩阵 (17)四、企业学习阶段培养方案 (23)(一)培养目标 (23)(二)培养标准 (24)(三)教学内容 (26)(四)实施企业 (30)(五)工程实践条件 (30)(六)师资配置 (33)(七)考核方式及评分标准 (38)(八)完善师资工程能力的培养机制 (39)(九)合作企业及工程实践基地一览表 (40)附件一:西南交通大学加强教师工程实践与国际化教育管理办法 (41)附件二:西南交通大学“卓越工程师”教师评聘与考核办法 (45)附件三:企业联合培养协议书及实践基地协议 (48)附件四:信息科学与技术学院自动化(交通信息工程及控制)专业教师工程实践经历培养管理规定 (50)附件五:信息科学与技术学院聘请企业教师暂行办法 (52)附件六:课程主讲教师聘任及管理考核办法 (55)一培养目标自动化(交通信息工程及控制)专业培养热爱祖国、品德高尚、崇尚科学、追求卓越、德智体美全面发展,具有自动化专业扎实的基础理论和专业知识,具有较强分析、解决问题的能力和工程实践能力,从事交通信息工程及控制系统方面的设计、开发、生产、管理、维护和技术支持的应用型、复合型工程技术人才。
具体要求:1、热爱祖国,拥护中国共产党的领导;掌握马克思主义、毛泽东思想和邓小平理论的基本原理;具有爱国主义、集体主义、社会主义观念。
2、具有科学、技术、职业以及社会经济方面基础知识。
(1)人文和社会科学知识:包括工程经济、管理、社会学、情报交流、法律、环境等人文与社会学的知识。
(2)工程科学和相关自然科学基础知识:包括作为工程基础的高等数学、工程数学知识和物理知识。
(3)工具性知识:熟练掌握一门外语,可运用其进行技术的沟通和交流;了解信息科学基础知识,掌握文献检索的一般方法。
基于测控技术的自动驾驶系统设计与实现自动驾驶技术是近年来备受关注的研究领域,它为交通领域带来了革命性的变革。
基于测控技术的自动驾驶系统设计与实现是实现自动驾驶的重要一环。
本文将为您介绍自动驾驶系统设计与实现所涉及的关键技术和挑战。
首先,自动驾驶系统的设计离不开传感器技术。
传感器是自动驾驶系统获取周围环境信息的重要组成部分。
常用的传感器包括激光雷达、摄像头、雷达、超声波传感器等。
这些传感器能够实时感知车辆周围的障碍物、行驶状态等关键信息,并将其转化为数字信号,为自动驾驶系统的决策和控制提供必要的数据支持。
其次,自动驾驶系统需要处理大量的数据和信息。
这就需要面临处理能力高、响应速度快的挑战。
为此,采用高性能的计算平台和强大的算法处理能力是必不可少的。
例如,自动驾驶系统可以采用基于深度学习的算法来对感知到的图像进行处理和分析,从而实现环境理解、目标检测和障碍物识别等功能。
另外,自动驾驶系统设计还要考虑实时性和可靠性。
自动驾驶系统需要实时地对周围环境做出决策,并及时地进行车辆控制。
因此,系统设计必须考虑实时性和可靠性两个方面。
例如,系统需要采用高速总线和高性能的控制器,以确保数据的传输速率和精确度。
同时,系统还需要进行多重冗余设计,以提高系统的可靠性和容错性。
此外,自动驾驶系统设计还需要考虑车辆的动力学特性和控制策略。
车辆动力学特性的建模和预测是自动驾驶系统设计中的一个重要环节。
通过对车辆动力学特性进行建模和分析,可以为自动驾驶系统的路径规划和车辆控制提供基础。
最后,自动驾驶系统的设计还需要遵循一定的安全性和隐私保护原则。
自动驾驶车辆需要能够应对不同的交通状况和道路情况,并能够做出合理的决策。
为了保证安全性,自动驾驶系统需要进行系统级的安全分析和风险评估,并采取相应的安全措施。
同时,系统设计还需要保护用户的隐私,避免个人信息泄露和滥用。
总之,基于测控技术的自动驾驶系统设计与实现是一个涉及多个技术领域的复杂工程。
西南交通大学计算机与人工智能学院考纲西南交通大学计算机与人工智能学院考纲简介西南交通大学计算机与人工智能学院设置了一套完善的学历考试和考纲,以确保存在的学术标准。
该学院目前开设有本科、硕士、博士和研究生四个层次的学位计划。
学院坚持以质量为中心,致力于推进教学和科学研究,服务社会与社会需求,引导学生开拓创新,着力提升学院的国际地位。
学院本科生考试拆分考试大纲旨在为本科生提供更完善,高品质的学术学习体验。
该考试大纲以计算机与人工智能学科的基础理论为基础,以计算机科学的全面性应用和学术研究为特色,以计算机与人工智能技术的交叉融合为重点,以计算机软件、硬件及人工智能应用为培养目标。
本科考试内容包括两个层次的课程:基础课程和必修课程,并根据学生情况安排选修课程,让学生依据兴趣参加选择非必修课程实现专业和学术进一步发展。
本科学习内容包括理论课程、实践课程和计算机与人工智能实验,同时还将涉及编程语言、数据结构、算法、数字电路、操作系统、软件工程、数据库系统、网络与通信、计算机系统结构、人工智能等方面的内容,旨在让学生全面掌握本科专业知识,培养有创新能力的复合型计算机专家。
研究生考试也由课程考试和毕业论文考试组成。
课程考试包括两部分,一部分是基于本学科和其他重要学科的学术技术课程,另一部分是以学院本科生课程为基础的专业培训。
研究生课程考试将帮助学生扩大研究的视野,以适应计算机领域的快速发展和实践要求。
毕业论文考试要求学生完成一篇论文,内容以关于学院课程所涵盖的任何计算机理论、技术或应用方面的技术问题为主题,主要是围绕学生在学习中发挥良好创造能力,自身把握学科发展和应用未来趋势,以及开发科学理论或应用创新为主要内容。
本科生论文考试中涉及的内容多以电脑语言程序、电脑编程和人工智能专业考试为主,还涉及计算机图形学、网络技术、数据库技术等内容。
本学院计算机与人工智能学院致力于为学生提供完善的课程考试和毕业论文考试,使学生的学术能力得到充分提升,特别是有关计算机及其相关应用领域的专业技术,力求为社会打造能够在相关研究领域做出贡献的高素质人才。
用于汽车驾驶机器人的车辆性能自学习方法陈刚;张为公;龚宗洋;孙伟【摘要】为了缩短在进行汽车试验前驾驶机器人对不同车型的适应性调整时间,提出了一种用于驾驶机器人的车辆性能自学习方法,对影响驾驶机器人驾驶行为的车辆尺寸和汽车性能参数进行自学习.车辆尺寸的学习通过示教再现实现,汽车性能自学习中油门和制动执行器的指令信号通过所需的车辆驱动功率来确定.对因长时间驾驶引起的控制参数变化进行在线优化,以补偿长时间试验过程中汽车零部件的磨损.试验结果表明,提出的方法实现了驾驶机器人的自学习、自适应、自补偿,驾驶机器人具有良好的车型适应能力,车速跟踪精度满足试验的要求,能消除汽车试验中人为因素的影响.【期刊名称】《中国机械工程》【年(卷),期】2010(021)004【总页数】5页(P491-495)【关键词】汽车;驾驶机器人;车辆性能参数;自学习;自补偿【作者】陈刚;张为公;龚宗洋;孙伟【作者单位】东南大学,南京,210096;东南大学,南京,210096;东南大学,南京,210096;东南大学,南京,210096【正文语种】中文【中图分类】TP273;U467.50 引言随着汽车工业的发展,人类对汽车的性能要求越来越高,需要借助于大量的试验来改进设计。
由于汽车试验重复性强、持续时间长、工作环境恶劣,因此更适合由机器人来操作[1-2]。
国外驾驶机器人的关键技术还处在保密阶段,目前拥有该项技术的主要有德国 SCHENCK、ST ÄHLE,美国的 LBECO,英国的MIRA 、Froude Consine,日本的 HORIBA 、Nissan Motor、AUTOMAX 等。
国内主要有东南大学与南京汽车研究所联合研制成功的、具有自主知识产权的DNC—1型、DNC—2型和DNC—3型驾驶机器人[3-4]。
采用驾驶机器人进行汽车试验不仅可以降低试验人员的劳动强度,节省试验费用,提高试验效率,而且能消除人为因素的影响,保证汽车试验数据的准确度和有效性。
基于自动化技术的智能驾驶模拟汽车设计者:陈然1曾壹2刘王瑞1指导教师:朱志国(西南交通大学1交通运输与物流学院,2电气工程学院四川成都611756)作品内容简介近年来,随着自动化技术的快速发展,以及自动驾驶技术的逐渐成熟,自动驾驶的汽车越来越受到人们的期待。
自动驾驶的汽车不仅可以代替部分司机的驾驶功能,还能检测出司机在驾驶过程中的一些错误操作,因此可以说自动驾驶的汽车能在安全性和可靠性上有较大提高。
本次论文中的车辆就是基于自动化的技术而实现自动驾驶,它能充分减轻司机的劳动强度,提高车辆的可靠性,保证车辆和人员的安全。
该系统分为自动控制,换道控制两种控制模式,以及两种模式的切换按钮——JTA(警惕按钮)。
当车辆处于自动控制模式时,通过设备检测两根车道线使车辆在车道内行驶,检测到前方存在障碍物后停止车辆,检测到侧方存在障碍物时拒绝换道;当车辆处于换道控制模式时,在侧方无车辆时可屏蔽检测车道功能实现正常手动换道,另外在有违规操作时都伴有声音报警。
两个模式可由JTA按钮自由切换。
该系统可以实现自动驾驶,减轻司机的劳动强度,防护疲劳、酒后以及不娴熟的驾驶,更好的帮助残疾人士驾驶汽车,另外在加装相关设备的情况下,可以在恶劣天气下行驶,进行灾害救援甚至军事行动等。
此车辆完全由我们自己制作,旨在展示我们自己所学,在制作工程中有所收获,有些功能还不太完善,但也能为相关部门提供技术参考。
关键字:安全可靠自动控制换道控制警惕按钮1.研究背景20世纪80年代以来 ,智能控制理论与技术在交通运输工程中越来越多地被应用。
在这一背景下 , 自动驾驶汽车的提出是十分必然的。
自动驾驶汽车是一种高新技术密集的新型汽车 ,是目前主流汽车的换代产品。
随着我国汽车保有量的增加 , 道路交通拥堵现象越来越严重 , 每年发生的交通事故也在不断上升 ,为了更好的解决这一问题 ,研究和开发汽车自动驾驶系统是很必要的。
有研究表明一个年轻敏捷的驾驶员,通常对各种情况做出及时反应的时间约为500毫秒,自动驾驶系统做出反应的时间不超过100毫秒 ,安全性更高 ,而且还可以将该系统安装在大型货车上,替代疲劳驾驶的司机,可以大大降低事故的发生率。
随着信息技术、计算机技术、制造技术等高新技术的迅猛发展,国际上汽车研究设计开发水平在大幅度提高 , 在中国开展汽车自动驾驶系统的研究,具有特别重要的意义,具体体现在以下几个方面:1、突破制约汽车工业整体跃上新台阶的若干理论与技术基础难题;2、在“智能汽车”这一新的制高点上,缩小与国际先进水平的差距3、在新一代汽车“智能汽车”领域占有一席之地 ,并促进智能运输系统研究开发4、形成中国自己的智能汽车研究队伍和研究基地 ,这对于中国意义尤其重大。
2.设计原理2.1 系统设计思路对现实中的驾驶情况调查后发现,车辆在以下三种情况需要人工的操作较多:1、车辆即将驶离车道,2、前方有障碍物影响安全行驶,3、正常换车道时左右有障碍物,4、车辆由于某种原因处于失控状态。
由此得出该隐患监测及预警器应能实时检测行驶车道的位置、前方障碍物的距离、左右障碍物的位置,通过远程控制设备控制车辆。
本套系统的组成部分应包括:红外线传感器、超声波模块及蓝牙串口通讯模块、单片机控制电路和无线遥控电路。
系统设计工作思路如图1所示。
图12.2 系统设计结构与功能车辆分为两个模式:即自动控制模式,换道控制模式。
两个模式之间的切换使用JTA(警惕按钮)实现。
◆自动控制模式:屏蔽司机的操作,汽车只执行单片机的操作,使汽车按规定的安全的路线行驶。
◆换道控制模式:当出现需要进行人工换道时,进行正常换道的手动操作,可以暂时不检测车道,让车辆正常越过车道,但伴有声音报警。
◆JTA:在自动控制模式和换道控制模式中的切换。
具体处理功能如下:1、车辆处于自动驾驶模式时,司机只需控制油门即能保证车辆一直在车道内行驶,实现汽车行驶虚拟轨道化。
2、汽车自动检测偏离车道,并同时命令汽车向原车道方向行驶,避免驶出车道,并给予警示。
3、前方车道内有障碍物时能够自动检测并停车,在手动切换到换道控制模式时能够换道以绕开障碍物。
4、若汽车将更换车道行驶时,为避免自动模式的干预,可按压JTA以进入非常控制模式屏蔽自动模块,从而顺利完成变道。
此模式一直伴有报警。
5、侧方有障碍物时,即使在换道控制模式下也不能换道。
6、能够被城市交通控制中心远程控制。
设计结构如下页图2、图3所示。
图2图32.3系统设计的实现方法2.3.1功能实现原理前方障碍物探测与避障功能超声波模块发射超声波的同时会向单片机(前方测距)发出一个高电平。
车辆前方出现障碍物时,超声波模块检测到回声并将电平拉低。
高电平持续的时间通过编程计算,可以得出车辆与前方障碍物的距离。
当这个距离小于规定的数值时,单片机(前方测距)会发送一个低电平到单片机(车辆驱动),车辆在检测到信号后会自动停止,当障碍物离开时,车辆亦可继续正常行驶。
●行驶方向校正功能如果红外线传感器(线路)检测到车道,说明车辆即将冲出车道。
这时应当立即修正车道。
修正车道的同时,蜂鸣器开始报警,以提醒司机。
在夜晚车底的光照不良,故配备了SLED 光源照亮车底。
●更换线路功能在一个换道按钮的控制下,车辆能够把手动操作的左转、右转指令理解为向左或向右更换车道的指令。
操作者也可以通过再次按压换道按钮恢复车辆左转、右转的功能。
换道指令的执行会受到红外线传感器(避障)的制约。
●两侧物体检测功能当车辆两侧有会对换道构成阻碍时,红外线传感器(避障)就会发出一个低电平到单片机(车辆驱动)对应的一个引脚上。
单片机检测到该信号时,会禁止车辆换道并发出警报提醒司机。
●远程控制功能可以实现与上位机通讯,控制中心能够在需要时控制车辆运行。
远程控制也能够一样实现车辆的加速和换道。
蓝牙通讯距离远,所以此次考虑用它模拟远程控制。
2.3.2各按钮的功能含义◆无线控制器(模拟司机室的油门和转向按钮)图4◆蓝牙控制器(模拟城市交通控制中的远程控制)图52.4系统设计的工作流程从车辆开始通电启动,其工作流程按如下顺序执行及触发:●SETP1:接通电源车辆,车辆启动;●STEP2:若驾驶光线不足,则打开车底LED照明灯;●STEP3:通过无线模块模拟油门驾驶车辆在车道内行驶,若按压JTA则转STEP9,若停止驾驶转STEP12;●STEP4:若红外检测设备检测到车辆碾压车道,转STEP5,若超声波模块检测到前方有障碍物,则转STEP7,否则转STEP3;●STEP5:单片机通过内部运算使车辆驶回车道,并启动扬声器给予声音报警;●STEP6:若红外检测设备检测到车辆驶回车道,自动关闭自动驾驶和扬声器,转STEP3,否则转STEP5;●STEP7:单片机停止车辆,并启动扬声器发出声音报警,等待约2秒的时间自动换道,并检测原车道障碍物有无驶过;●STEP8:若红外设备检测原车道已无障碍物,自动关闭自动驾驶和扬声器,并自动换道驶回原车道,并转STEP3,否则转STEP7;●STEP9:单片机发出声音报警提醒司机已屏蔽自动模块,车辆处于可换道状态,但有一定风险,此时车辆碾压车道不会被自动驶回;●STEP10:若车辆即将转向的方向有障碍物,红外检测设备检测到后立即停止车辆,并启动扬声器发出声音报警,否则转STEP11;●STEP11:司机确认换道成功后再次按压JTA,单片机控制扬声器关闭,自动模块启动,转STEP3;●STEP12:关闭车辆开关,切断电源,车辆停止行驶。
3.创新特色在制作过程中,我们运用在校所学知识使该车辆完成了规定任务。
受铁路中ATP的启发,我们规定车辆遇到障碍物自动停车,不管怎么踩油门都不行使;受LKJ-2000的启发,按压警惕按钮能换道并能够报警,直到恢复检测车道功能警报方能消除;受CTC调度集中的启发,紧急情况下可由上位机远程统一控制,不再执行司机操作。
另外,我们也考虑到夜间或雨天光线较差时对传感器的影响,所以在车底加装了LED闪光灯,以满足车辆在任何光线条件下的运行,使其可靠度和安全度大大提升。
总之,我们的小车在遇到事故时是满足故障——安全原则的。
4.应用前景随着国民经济的增长和城市的发展,汽车的保有量将逐渐增加,所以人们对于驾驶时候的安全与便利考虑也越来越多。
我们的基于自动化的自动驾驶小车有以下的应用前景:(一)减轻司机劳动强度,预防疲劳驾驶;如果司机因为饮酒过度或驾驶技术不娴熟导致错误的驾驶行为,车辆能够及时纠正车辆行驶方向,避免酒后驾车和不娴熟的驾驶造成的恶果。
(二)车辆能够通过编程实现左右的传感器检测道路旁的护栏,让车辆按照一定路径行驶且不会受环境控制。
使用该装置车辆可以极大的避免很多恶劣天气对驾驶安全的影响。
在大雾、雷雨等恶劣天气里,车辆也能够顺利通行,极大的避免了恶劣天气中交通事故的发生,也可以使得高速公路在大雾等天气条件下不用封闭。
(三)该车搭载了4块单片机,拥有强大的自动控制系统,能够适应多种自动控制任务。
在配套设备的支持下,可以实现自动灭火、灾后救援与军事行动等工作。
(四)车辆能够通过蓝牙设备接受远程控制,在必要的时候可以从指挥中心直接控制车辆的行驶。
这种功能可以在客车被劫持时让车辆仍然可以被控制,或在客车失控时紧急控制车辆对危险情况做规避。
由于使用的是蓝牙串口模块,可以通过小型摄像头把车内状况实时传递到控制中心,由此可以实现车内任意视角的实时监控。
除了传送图像数据,该模块还可以将车内各种感应器采集的数据实时传递到控制中心。
为监视提供了便利。
(五)进行车辆智能自动启动:在开发板上下载相应定时的程序,就能够让车辆在车主设置的固定时间自行启动,等待车主驾驶。
(六)进行相关人机系统的开发,使更多残疾人士驾驶车辆成为可能。
(七)可以实现旅游景区的慢速游览,实现安全、绿色、便捷的吸引旅客的亮点。
参考文献[1] 彭其洲.运输安全系统工程[M].成都:西南交通大学出版社,1995[2]肖贵平朱晓宁交通安全工程,北京:中国铁道出版社,2007[3]于永,戴佳,刘波.51单片机C语言常用模块与综合系统设计实例精讲.电子工业出版社, 2008.[4]赖麟文,8051单片机C语言彻底应用,科学出版社,2002[5]沈宏卫单片机应用系统设计实例与分析,北京航天大学出版社,2003.1[6]程加园朱定见汽车自动驾驶系统的研究,科技纵横,2010。