全向移动机器人的运动控制
- 格式:doc
- 大小:7.61 MB
- 文档页数:21
0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
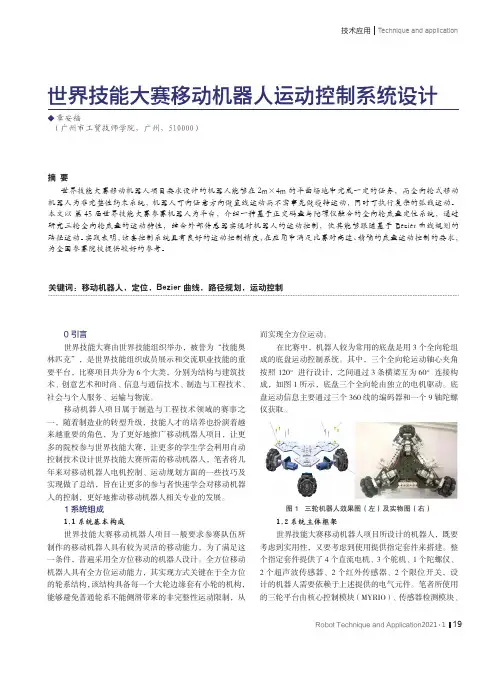
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。

全向轮移动机器人的设计和控制050308225 Alex.Wang摘要这篇论文介绍一个全向移动机器人作为教育学习。
由于它的全向轮设计,这种机器人拥有有各个方向移动的能力。
这篇论文主要提供了一些关于常用的和特殊的车轮设计,以及全向轮机械设计方面和电子控制方法:远程控制、自动导航寻迹和自动控制的方法。
1、引言移动机器人在工业和技术方面应用的重要性正在日益的增加,在无人监控值守、检查作业、运输运送领域已经得到了广泛的应用。
一个更加紧俏的市场是移动娱乐机器人的开发。
作为一个全自动的移动机器人,其中一个主要的应用需求是它的空间移动能力,同时能够避免障碍物并且发现去下一站的路径。
为了能实现这种任务,能够引导机器人移动的功能如定位、导航必须为机器人提供他当前位置信息,这就意味着,它要借助于多个传感器,外部的状态参考和算法。
为实现移动机器人能够在狭窄的区域移动并且避开障碍物,必须具备良好的移动性能并得到正确而巧妙的引导,这些能力主要取决于车轮的设计。
关于这方面的研究正在持续不断的进行,以改善移动机器人系统的自动导航能力。
本篇论文介绍一种全方向的移动机器人作为教育之用。
采用特殊的Mecanum轮设计,使这种机器人拥有全部方向的移动能力。
论文目前提供一些关于传统的和特殊的车轮设计、机械结构设计以及电路和控制方法、远程遥控、线性跟踪(LINE FOLLOW)、自动控制方面的信息。
由于这种机器人的移动能力和它各种控制方法的多样选择性,本章中讨论的机器人可以作为一个非常有趣的教育性平台。
这篇论文是一项在Robotics Laboratory of the Mechanical Engineering Faculty, ”Gh. Asachi” Iasi理工大学研究成果的总结报告。
2、全方向移动能力“全方向”这个术语是用来描述一个系统在任意的环境结构中立刻向某一方向移动的能力。
机器人型运动装置通常是为在平坦的平面上移动而设计的,运行在仓库地面、路面、LAKE、桌面等。
机器人的运动控制与智能感应技术一、引言近年来,机器人技术发展迅速。
机器人作为一种新兴的技术手段,其能够具备自主控制、高精度、高效率等优点,已经被广泛应用于众多重要领域,如工业制造、医疗服务、农业生产等。
然而,实现机器人在狭小空间内的灵活自主运动和感知能力仍是亟待解决的问题。
运动控制和智能感应技术是机器人在狭小空间内实现自主运动和感知的核心技术,本文将对该领域进行分析和探讨。
二、机器人运动控制技术1. 运动控制技术的概念和作用运动控制技术是一种利用控制器控制电机或其他执行器实现所需运动的技术。
在机器人研发中,运动控制技术通常用于控制机器人的运动轨迹,准确地控制机器人的运动方向、速度、加速度等参数,以实现机器人的自主控制和移动。
运动控制技术的作用在于提高机器人的运动精度和速度,从而实现更高效的生产和制造。
2. 常见的运动控制技术(1)PID控制PID控制是一种基于比例、积分和微分的控制方法。
通过调整PID各项参数可以控制机器人的位置、速度等参数。
PID控制可以实现快速响应、高精度的运动控制。
(2)轨迹生成算法轨迹生成算法是一种基于梯形轮廓和三次曲线方法的轨迹规划算法。
该算法可以生成机器人的移动轨迹,以实现机器人的自主控制和移动。
3. 发展趋势随着机器人技术的发展和应用场景的不断扩大,运动控制技术也在不断发展壮大。
未来,运动控制技术将更加注重系统整合和运动控制的灵活性和智能化。
三、机器人智能感应技术1. 智能感应技术的概念和作用智能感应技术是一种利用传感器等技术手段获取环境信息,并通过智能计算等算法对环境信息进行加工和分析,最终实现机器人对环境的主动感知和响应。
智能感应技术的作用在于提高机器人的自主感知和控制能力,实现机器人对复杂环境的适应和应对。
2. 常见的智能感应技术(1)激光测距技术激光测距技术是一种通过激光束测量目标距离的技术。
机器人将搭载激光传感器,将激光束照射到目标物体上,通过计算光束的反射时间和强度,可以测算出目标物体与机器人的距离、形状等信息。
机器人机械手的控制与运动规划近年来,人们越来越关注机器人的发展,机器人已经成为了当今科技发展的热门话题。
其中,机器人机械手的控制与运动规划也是研究的热点之一。
在制造业、物流业等领域,机器人机械手已经成为了必备的工具。
下面,我们来探讨一下机器人机械手的控制与运动规划。
一、机器人机械手的控制机器人机械手的控制是指机器人机械手的运动控制和姿态控制,通常包括动力学控制和轨迹规划等。
动力学控制是指机器人运动学控制,包括位置和速度控制。
轨迹规划是指机器人按照规定的轨迹进行运动,以实现对工件的加工或者搬运等功能。
机器人机械手的控制主要分为两种方式:一种是基于传感器的反馈控制,另一种是基于模型的前馈控制。
基于传感器的反馈控制,是通过对机器人运动过程中传感器的检测与反馈信息进行采集和分析,以实现对机器人所处环境、位置和姿态的感知和控制,从而满足机器人的任务需求。
在工业自动化领域,这种方式运用较广。
基于模型的前馈控制,是先制定好机器人的控制模型,通过控制器的控制信号使机器人按照程序控制的运动轨迹进行移动,这种方式的优点是精度高,稳定性好,但控制难度较大。
二、机器人机械手的运动规划机器人机械手的运动规划是指预先制定出机器人工作时的各种运动姿态和路径,使机器人按照这些规划进行动作。
机器人机械手的运动规划是机器人控制中的重点和难点。
机器人机械手的运动规划主要分为两种方式:一种是基于位姿空间的运动规划,另一种是基于关节空间的运动规划。
基于位姿空间的运动规划,是把机器人的位姿信息(位置、姿态)作为规划对象,基于轨迹生成算法,使机器人按照规划的轨迹进行移动。
这种方式的优点是规划简单,姿态控制方便,但是规划效率较低。
基于关节空间的运动规划,是把机器人运动的关节角度作为规划对象,利用轨迹生成算法,并根据关节角速度和关节角度限制规划机器人的轨迹,从而保证机器人在运动过程中的稳定和精度。
这种方式的优点是计算效率高,规划难度低,但需要关节传感器的支持。
全轮转向移动机器人运动学建模及机动性研究随着科技的不断发展,移动机器人在工业、军事、医疗等领域的应用越来越广泛。
全轮转向移动机器人作为一种灵活且机动性强的机器人,受到了研究者们的广泛关注。
全轮转向移动机器人具备四个独立驱动的轮子,并且每个轮子均可独立转动。
这种机构设计使得机器人可以在水平面上实现前进、后退、平移、旋转等多种运动方式,具备了较强的机动性。
因此,对全轮转向移动机器人的运动学建模及机动性研究显得尤为重要。
首先,对全轮转向移动机器人进行运动学建模。
运动学建模是描述机器人运动的数学模型。
对于全轮转向移动机器人而言,需要考虑每个轮子的转角以及机器人的速度控制。
通过建立适当的数学模型,可以得到机器人的位姿与轮子转动之间的关系。
运动学建模不仅可以帮助我们理解机器人的运动规律,还可以为机器人的路径规划、运动控制等方面提供基础支持。
其次,研究全轮转向移动机器人的机动性。
机动性是指机器人在运动过程中的灵活性和可操作性。
全轮转向移动机器人由于具备独立转动的轮子,因此可以实现更加复杂的运动方式,如平稳的转弯、精准的定位等。
通过研究机器人的机动性,可以优化机器人的运动控制算法,提高机器人的运动能力。
最后,应用全轮转向移动机器人的运动学建模及机动性研究成果。
全轮转向移动机器人的应用领域十分广泛,如工业生产线上的物料搬运、仓库内的货物整理、医院内的病床运送等。
通过研究全轮转向移动机器人的运动学建模及机动性,可以为这些应用场景提供技术支持,实现自动化、智能化的操作。
综上所述,全轮转向移动机器人的运动学建模及机动性研究对于提高机器人的运动能力、优化运动控制算法具有重要意义。
通过深入研究,我们可以更好地理解和应用全轮转向移动机器人,为各个领域的自动化操作提供强有力的支持。
机器人运动控制与动力学特性分析引言近年来,机器人技术在各个领域里取得了长足的发展。
机器人的运动控制和动力学特性是决定机器人行为和性能的重要因素。
本文将探讨机器人运动控制的基本原理以及动力学特性的分析方法,以期加深对机器人控制系统和性能的理解。
一、机器人运动控制的基本原理1.传感器反馈机器人运动控制的核心是实时获取机器人的状态信息,这在很大程度上依赖于传感器的反馈。
传感器可以用于测量机器人的位置、速度、力等物理量。
最常用的传感器包括编码器、惯性测量单元(IMU)、力/扭矩传感器等。
通过对传感器数据的采集和处理,可以实时获取机器人的姿态和状态信息,从而对机器人的运动进行精确控制。
2.运动学模型机器人的运动学模型描述了机器人运动状态的变化规律。
它以坐标系、关节角度和位姿等信息为输入,通过运动学方程计算出机器人的末端执行器位置和速度。
机器人的运动学模型可以使用欧拉角、旋转矩阵或四元数等不同的方式表示。
通过对运动学模型的建模和控制,可以实现机器人末端执行器的精确定位。
3.控制算法机器人的运动控制算法是实现机器人精确运动的关键。
常用的控制算法包括PID控制、模糊控制和自适应控制等。
PID控制是一种常见的反馈控制算法,通过调节比例、积分和微分参数,可以实现对机器人运动的精确控制。
模糊控制算法则通过模糊化和规则化来处理非线性和不确定性,提高机器人的鲁棒性和适应性。
自适应控制算法可以实时调节控制参数,适应不同环境和任务需求。
二、机器人动力学特性的分析方法1.力学模型机器人的动力学模型描述了机器人运动状态变化的原因和机理。
它以进给力和关节力矩为输入,通过动力学方程计算出机器人的加速度和惯性力等信息。
机器人的动力学模型可以采用拉格朗日动力学、牛顿-欧拉动力学等不同的方法表示。
通过分析机器人的动力学特性,可以了解机器人受力、能量分配和扭矩传递等重要参数,为机器人的控制和优化提供基础。
2.运动控制策略机器人的运动控制策略是指在特定任务下,通过合理的控制方法和策略,实现机器人运动的最优化。
机器人的运动控制机器人的运动控制是指对机器人进行各种运动方式的控制,使其能够准确地执行各种任务。
近年来,随着科技的不断发展,机器人出现在各个领域中,如制造业、医疗领域、农业和教育等。
机器人的运动控制是机器人技术中的关键环节,它直接影响着机器人的性能和运动能力。
一、机器人的运动方式机器人的运动方式主要分为步行运动、轮式运动和足式运动等。
步行运动是指机器人通过人类的步态进行移动,这种运动方式灵活、稳定,适用于各种地形。
轮式运动是指机器人通过轮子进行移动,这种运动方式适用于平坦的地面,速度较快。
足式运动是指机器人通过模仿人类的脚步运动来移动,这种方式可以适应复杂地形,但运动速度相对较慢。
二、机器人的运动控制方法机器人的运动控制方法有多种,其中较为常见的有程序控制方法、传感器反馈控制方法和视觉控制方法等。
1. 程序控制方法程序控制方法是指通过编写程序来控制机器人的运动。
机器人运动的每一个步骤都需要预先编写好的程序进行控制,这种方法适用于运动过程相对简单、重复性较强的任务。
程序控制方法能够保证机器人的运动稳定性和精度。
2. 传感器反馈控制方法传感器反馈控制方法是指通过机器人内部的传感器获取环境信息,然后根据信息反馈进行运动控制。
传感器可以获取机器人当前的位置、姿态、速度等参数,进而进行实时的控制调整。
这种方法能够使机器人更加智能化、适应性更强。
3. 视觉控制方法视觉控制方法是指通过摄像头或其他视觉传感器获取环境的图像信息,然后对图像进行处理和分析,从而控制机器人的运动。
视觉控制方法适用于需要机器人对环境进行感知和识别的任务,比如人脸识别、物体抓取等。
三、机器人运动控制系统的关键技术机器人运动控制系统是由硬件和软件两部分组成的。
在硬件方面,机器人运动控制系统主要包括电机、传感器和执行机构等。
电机是机器人运动的动力源,传感器用于获取环境信息,执行机构负责执行机器人的运动指令。
在软件方面,机器人运动控制系统主要包括路径规划、动力学建模和运动控制算法等。
■设计与分析♦S h e ji yuFenxi主动脚轮式全向移动机器人的动力学解耦分析薰健(:四川:交通职业技术学.隱.:•四川成都611130)摘要邊计:T “种具有驱动能力的JS 动脚轮.f t 氣_脚轮设计方溱基础上蜜眞有两个_脚轮的全向移动机器人的S 动学 和动力攀模壅.,弁擻出.了基.予两个_主动脚轮的全向移动机#人的动A 争解耦控M 方案.,解决了食动脚轮式全向移动机器人运动过輕中 的动力学耦合间题。
关键词通毒I 脚轮;遂熟学建模i.翁力—建模;翁力学I I 耦0引言全向移动机器人具有平面内三个自由度,适含在狭小的:£作空间内移讀_B ]。
1前,麵存_S 神轮乎,分剔是Mecanum 轮、球轮、由翁脚轮-萁中,Mecanum 轮的代.表研宄机构是德蘭.的库卡公茼,并旦该公司将其产品化,应用于航空发动机装配 车舞%球轮©惠要研究机构基E 本的九州大學I 就急-脚轮 的主a 研机构是斯坦鑛大学[ifR 主动脚轮由:于變_构限制, n 运韵过雜中赛在激力学藕合筒题,容裏出现滑转、■-规 象=,这将导致移讀机器人移翁精慶下降,本文对基子两个is 讀 脚轮的全向驂_机器人进行了翁力P 解耦分析。
1主动脚轮设计主动脚轮是一种具有驱动能力的轮子,其三维模型如图1 (a )所示,主动脚轮的传动方案简图如图H b )所示,■爾脚轮 由躯动电机和转向电机两个电机同时驱靖》转向电机皮带一*{龙子驱动电机脚轮架齿轮2齿轮1锥齿轮2锥齿轮1轮子带轮1转向架带轮2图1王动脚轮的三维图及传动万案图①繼_.电机:!:作療理;驱_.电机将垣尊传遵羅雜齿轮1 機锥齿轮2’然后通过带轮1带动帶轮2进而带魂轮子讓魂…(2)转向电机re 作原理;转向电机带_轮’通过*轮2将 运动传递到齿轮1上,进I t 带动轮架进行转动,使得轮子转向。
2机器人的运动学与动力学分析2.1运动学模型建立基于主动脚轮的全_移劝机器人的.运动嗓现是通过两个 患猶脚轮的四个电机控制,因此在进傾运翁学建糢时,可以将 机器人的从动轮忽略,其简化肩的机构如图2所示:.¥FZ 为全 局坐标系;寧为厲藥在机器人牟雜土的局鄯坐标系;焉.考r 坐标系中的单位.舞霹:B 为移动机器人底盘的几何中心;饫 为第;个脚轮轮子滚1J 时转过的角廣,珥为第i 个脚轮与机器人 奉»坐标赖痛I ®方向的夹角,初为第〖个_着脾轮相对于全# 坐标系r 敏;E 友向所转过的# R >r 为翁力脚轮的轮子半赞; 6为翁子的安裝点到轮轴的水平粗离W 为移功机器人的速度a两轮子作用爾移动机器人几何中心的逮麗为::vol=〇j ts;i n ctjirtpos a j ) X rkv ^^C s in a 2f+cos a 2_/) XrA :移动机器人在#点的线速度和角速度®可m _示为:a )V B=V 〇i+V i kX O^r ^w kX A$W =a i +V i⑵本文设计的全向移动机器人6=r ,将式(1)代入(2)得到移120S h e ji y u F e n x i♦设计与分析|动机器人*动脚轮的运动学模型,并按廂并联机构的运动学建模方法进狞整i l鳥垂向移动机器人的逆运动学模塑为,=丄cos -sinr cos a2a2-sin a2 2.2动力学模型建立-sin a2-cos a2msm~6cos a^mmsin a2~bcos a2~m(3)每一个脚餘W以看;f乍一个RPR机构,采用牛顿欧拉方程对移动机器人进狞动力学分析,其动力靠程表示为;f=U(cr)ff+V(〇■,〇■)(4)式中,T为机器人转苘关节和驱爵的輯矩力,.M k)为道动脚轮的质量矩•阵;T(.〇■,〇■)为哿式力和离心力的矢量。
机器人的运动控制与力控制算法近年来,随着科技的不断进步和人工智能技术的迅猛发展,机器人技术在各个领域得到了广泛的应用。
机器人作为一种能够自主进行动作的智能设备,其运动控制和力控制算法显得尤为重要。
是指机器人在进行各种操作任务时,通过对其运动轨迹和受力情况进行控制,以实现规定的动作或完成特定的任务。
运动控制算法主要负责控制机器人的运动轨迹和速度,实现精准的定位和移动;而力控制算法则是为了确保机器人在与环境或物体进行接触时能够保持稳定的受力状态,避免因外力干扰导致机器人的不稳定性或损坏。
在实际的机器人操作中,运动控制和力控制算法往往需要结合使用,以实现更加复杂和精密的操作。
例如,在工业生产中,机器人需要完成各种装配、焊接等操作任务,既需要精确的定位和移动能力,又需要保持稳定的受力状态,以确保操作的精度和安全性。
因此,研究和优化机器人的运动控制与力控制算法对于提高机器人操作效率和可靠性具有重要意义。
机器人的运动控制算法主要涉及到机器人的轨迹规划、运动学建模和控制器设计等方面。
轨迹规划是指确定机器人在空间中的运动路径,以实现特定的运动目标。
通常情况下,机器人需要在给定的工作空间中完成特定的操作任务,因此需要通过轨迹规划算法确定合适的运动路径,避开障碍物和碰撞,实现高效的运动轨迹。
运动学建模是指描述机器人运动学特性的数学模型,以便进行控制和仿真分析。
机器人的运动学模型描述了机器人的关节运动和末端执行器的运动之间的关系,是进行轨迹规划和控制设计的基础。
通过建立准确的运动学模型,可以实现对机器人运动的精确控制,提高机器人的定位精度和运动速度。
控制器设计是运动控制算法中的重要部分,其主要任务是根据实时的传感器反馈信息对机器人进行控制,实现期望的运动轨迹和速度。
常用的机器人控制器包括PID控制器、模糊控制器和神经网络控制器等。
这些控制器各有特点,适用于不同类型和复杂度的控制任务。
通过优化和调整控制器参数,可以实现对机器人运动的精确控制和鲁棒性。
机器人控制系统中的运动控制算法设计近年来,随着人工智能技术的快速发展,机器人在工业、医疗、军事等领域的应用越来越广泛。
机器人的控制系统是机器人能够完成各种任务的关键,其中运动控制算法是机器人控制系统中一个非常重要的组成部分。
本文将探讨机器人控制系统中的运动控制算法设计。
一、运动控制算法的概念运动控制算法是指控制机器人执行各种动作和移动的算法,其作用是将机器人的位置、速度、加速度等物理参数转换为电信号,从而控制机器人执行各种运动。
在机器人控制系统中,运动控制算法被广泛应用于机器人的轴控制、轨迹控制、力控制等方面。
二、运动控制算法的分类根据机器人的运动方式和运动控制的对象,运动控制算法可以被分为轴控制算法、轨迹控制算法、力控制算法等。
1. 轴控制算法轴控制算法是指针对机器人各轴运动进行控制的算法。
它主要应用于机器人的关节控制,用于控制机器人的姿态、角度等参数。
一般来说,轴控制算法包括位置控制算法、速度控制算法和加速度控制算法。
2. 轨迹控制算法轨迹控制算法是指根据机器人的轨迹控制来进行控制的算法。
它主要应用于机器人的移动控制,用于控制机器人的位置、速度和加速度的连续性。
一般来说,轨迹控制算法包括点到点控制算法、线性插补控制算法和三次样条插补控制算法。
3. 力控制算法力控制算法是指在机器人工作环境中,根据机器人的力传感器或接触控制器所感知到的力信息来进行控制的算法。
它主要应用于机器人的力控制,用于控制机器人在工作环境中的受力和力矩。
三、运动控制算法的设计过程运动控制算法的设计过程包括三个主要步骤:建模、控制器设计和实现。
1. 建模在运动控制算法的建模中,需要将机器人的动力学模型和运动学模型进行建模。
动力学模型包括机器人的惯性矩阵、阻尼矩阵和刚性矩阵;运动学模型包括机器人的位置、速度、加速度和姿态。
2. 控制器设计在控制器设计中,需要选择适当的控制方法并进行控制器的设计。
控制器设计的目标是实现机器人的精准控制,同时保证机器人的随动性和稳定性。
三轮全向机器人运动特性分析1.全方向移动能力:三轮全向机器人通过将三个轮子安装在平衡的位置上,可以实现全方向移动。
每个轮子都可以独立地控制并进行旋转。
这使得机器人在狭小的空间内可以自由移动,并能够在任意方向上快速转向。
这种特性使得三轮全向机器人在繁忙的环境中具有灵活性和机动性。
2.高度可交互性:三轮全向机器人还具有很高的可交互性。
它可以通过传感器和摄像头来感知周围环境,并能够与人进行有效的交互。
这使得机器人可以在人群中安全运动,并可以执行一些与人互动的任务,如自主导航、传递物品等。
这种可交互性使得三轮全向机器人在服务行业中有广泛的应用潜力。
3.运动灵活性:三轮全向机器人具有非常好的运动灵活性。
不仅可以在水平面上自由移动,还可以实现沿任意方向的旋转。
这种灵活性使得机器人可以根据不同的任务需求进行自适应运动,并可以在狭小的空间中灵活穿梭。
这种运动灵活性使得机器人在仓储、物流和生产等领域具有广泛的应用前景。
4.稳定性和准确性:三轮全向机器人在移动过程中具有良好的稳定性和准确性。
由于每个轮子都可以独立控制,机器人可以根据需要进行微调和平衡,这使得机器人可以在不同地面上保持稳定移动。
此外,机器人还可以通过精确控制轮子的旋转来实现精确定位和导航。
这种稳定性和准确性使得机器人能够执行一些精确度要求较高的任务,如精确导航、运输和操作等。
尽管三轮全向机器人具有上述的优势特点,但也存在一些挑战和限制。
例如,由于机器人需要较强的计算能力和感知能力来实现全方向移动和交互功能,所以需要配备先进的计算控制系统和感知设备。
此外,机器人在特殊地形上的运动性能可能会受到限制,如不平整地面、斜坡等。
因此,在设计和应用三轮全向机器人时需要综合考虑这些限制因素,以实现机器人的良好性能和可靠性。
总的来说,三轮全向机器人在机动性、交互性、灵活性、稳定性和准确性方面具有优势。
它在服务行业、仓储物流和生产等领域有广泛的应用前景,可以帮助人们提高工作效率和生活质量。
全向移动机器人的运动控制作者:Xiang Li, Andreas Zell关键词:移动机器人和自主系统,系统辨识,执行器饱和,路径跟踪控制。
摘要:本文主要关注全向移动机器人的运动控制问题。
一种基于逆运动学的新的控制方法提出了输入输出线性化模型。
对执行器饱和及驱动器动力学在机器人性能体现方面有重要影响,该控制法考虑到了以上两个方面并保证闭环控制系统的稳定性。
这种控制算法常用于真实世界的中型组足球机器人全方位的性能体现。
1.介绍最近,全方位轮式机器人已在移动机器人应用方面受到关注,因为全方位机器人“有一个满流动的平面,这意味着他们在每一个瞬间都可以移动,并且在任何方向都没有任何调整”。
不同于非完整的机器人,例如轮式机器人,在执行之前具有旋转任何所需的翻译速度,全方位机器人具有较高的机动性并被广泛应用在动态环境下的应用,例如在中型的一年一度的足球比赛。
大多数移动机器人的运动控制方法是基于机器人的动态模型或机器人的运动学模型。
动态模型直接描述力量施加于车轮和机器人运动之间的关系,以外加电压的每个轮作为输入、以机器人运动的线速度和角加速度作为输出。
但动态变化所造成的变化的机器人惯性矩和机械组件的扰动使控制器设计变得较为复杂。
假设没有打滑车轮发生时,传感器高精度和地面足够平坦,由于结构的简单,因而运动模型将被广泛应用于机器人的设计行为中。
作为输入运动学模型是机器人车轮速度,输出机器人的线速度和角速度,机器人的执行器的动力都快足以忽略,这意味着所需的轮速度可以立即达到。
然而,该驱动器的动态极限,甚至降低了机器人在真实的情况中的表现。
另一个重要方面是机器人控制的实践:执行器饱和。
因机器人轮子的指挥电机速度是有饱和的界限的,执行器饱和能影响到机器人的性能,甚至使机器人运动变得不稳定。
本文提出了一个全方位的机器人的一种运动控制方法,这种控制方法是基于逆输入输出的线性的运动学模型。
它需要不仅考虑到驱动器动力学的识别,但也需要考虑到执行器饱和控制器的设计,并保证闭环控制系统系统稳定性。
本文其余的部分:在2节介绍了运动学模型的一个全方位的中型足球机器人;在3节介绍了路径跟踪与定位跟踪问题基于逆运动学模型的输入输出线性化的解决方法,其中包括执行器饱和分析;4部分介绍了动态识别器及其在控制性能方面的影响;最后的实验结果和结论讨论部分分别在5和6。
2.机器人运动学模型移动机器人其实是一个全方位机器人,其原理显示在图1。
它有三个彼此120度对称安装的瑞典的车轮。
每个车轮的驱动用直流电机和具有相同距离的中心到机器人的质心R 。
3.逆输入输出的线性化控制三角函数的变换角θ所在的变换矩阵G 确定了非线性的运动学模型4。
由于矩阵G 是满秩,这种非线性模型可以精确线性化的引入一个简单的补偿1C G -=。
该线性化系统就变成了.x u =与一个新的输入向量[]123,,T u u u u = 。
图2:在组成C 下的线性化系统这种线性化系统显示在图2中是完全分离的,允许控制的机器人通过一个单独的方式平移和旋转。
当一个控制器K 的设计是基于这个简单的线性系统时,该控制器相对于原系统就变成了CK 。
整个控制回路,其中包括非线性系统,补偿和控制器,这一关系显示如图3。
图3:闭环控制系统x 代表机器人的状态向量[],,TR R x y θ且d x 代表的是理想状态向量;R x 与R y 是机器人在固定坐标系统中的位置。
基于输入输出线性化系统,关于机器人的平移和旋转控制的路径跟踪和定位跟踪问题在下面的小节进行了分析。
执行器饱和的影响也保持着平移和旋转运动之间的分解关系。
3.1路径跟踪控制作为一个高层次控制问题,路径跟踪被应用于本例中的处理机器人平移控制。
路径跟踪问题如图4所示。
P 代表所给定的路径,点Q 是正交设计R 在路径P 上的交点,路径坐标系统,,t n x Q x 分别是沿着路径P 移动和坐标轴t x 和n x 对应的切线和法线方向上的点和它们的交点。
P θ是路径切线方向在点Q 的水平夹角。
图5:饱和函数和它的增益特性。
图6:机器人定位的闭环控制。
4.驱动器的动态当我们假设低电平驱动器动力学速度快于比运动学的速度时,这个结果在最后一节是唯一可行的,或驱动器动力的延迟可以被忽略。
因而有必要在控制器的设计中分析和考虑驱动器的动态影响。
在下面的小节中,在观察输入输出的数据的基础上的执行器的动态识别,和其在机器人运动控制方案上的影响将被一一叙述。
4.1执行器动力识别该系统识别问题的目的是估算一个在观察输入输出数据基础上的模型从而得出性能指标最小化。
因为满秩变换矩阵在低电平动力模型(1)表示的输出..,m m RRx y 和ω是不相关的,对于一个普遍应用的参数模型,ARMAX 是被选择的模型识别,其结构可表示如下()()()()()(),k A z y t B z u t n C z e t =-+⒇ ()111...,a a n n A z a z a z --=+++(21) ()1111...,b b n n B z b z b z -+-=+++(22) ()111...,c c n n C z c z c z --=+++(23)k n 代表从输入()u t 到输出()y t 间的延迟,()e t 是一个干扰变量。
z 是产生于转变操作()()11q u tut -=-的结果,,,a b c n n n 分别是多项式()()(),,A z B z C z 的次数,为了选择这个模型的最优参数,我们使用预报误差法,其目的是去寻找最优的k n 和多项式()()(),,A z B z C z ,这样预测误差E 便是最小的,即()()()21,,,arg min Nopt t A z B z C z nk E ==⎡⎤⎣⎦∑,(24) ()()()()()()()10E y t A z B z u t nk C z e t -=--+,(25) 其中()0y t 代表输出变量的测量值。
Matlab 系统识别工具箱被用来确定执行器动力学模型。
图7、8和9显示就实际输入比较模型输出与测量输出之间的最佳参数。
图7:.mRx的识别模型图8:.mRy的识别模型图9: 的识别模型20.0515k<时,根轨迹可以穿越虚轴,当0ak=时闭环系统的极点可移动到右半平面。
图12:开环模型的根轨迹5.实验我们的机器人实验室有一半以上的RoboCup 中型组机器人,以上讨论的控制算法将在这里被测试。
全方位机器人的应用显示在图13。
图13:真正的全向机器人一个分辨率为 780580⨯的AVT Marlin F-046C 彩色相机被装配了一个指向走向的双曲面镜,该双面曲镜安装在全向机器人的顶部,这样一个完整的环绕地图就被机器人捕获了。
一个基于50赫兹输出信号的相机的自主定位算法描述如何得到机器人在某运行场地某时刻的位置。
这个车轮能驱动三个60W 的Maxon DC 电机且车轮的最高速度是1.9/m s 。
三轮编码器用来测量车轮的实际速度,编码器通过三个PID 控制器控制运转。
一个八字形路径可作为参考路径,其几何对称性和曲率的急剧变化给测试带来了挑战。
一个被选择的八字形路径和一个规模变量s 可表示为()()1.8sin 2,1.2sin ,r r x s y s ==(29)机器人受控于沿着八字形路径以恒定速度1/d v m s =,和我们的控制算法被选择的参数分别是122.5, 4.15,3k k k ===。
第一次实验所选路径的切线方向P θ是预期的机器人定位。
图14,15,16和17告诉我们所提出控制方法控制机器人的中心R 收敛于给定的路径和机器人定位跟踪一个可接受的理想的错误,此时执行机构的饱和度没有出现。
为了检查在执行器饱和方面的影响,实验二选择了理想的机器人定位20.9,d P p d c v θθ=+(30)其中p c 是曲率路径在点P 的曲率,其原因如图18,19,20和21告诉我们,机器人的中心R 收敛于给定的路径,即使当道路急转弯时车轮速度达到饱和状态。
图14:参考路径和机器人路径。
图15:距离误差。
图16:定位误差。
图17:真正的车轮速度。
图18:参考路径和机器人路径。
图19:距离误差。
图20:定位误差。
图21:真正的车轮速度。
6.结论本文提出了一种全向机器人的新的运动控制方法。
这种方法是基于逆输入输出线性化的机器人运动学模型,它完全分解了机器人平移和旋转。
机器的平移受控于沿着参考路径行进,机器人的旋转受控于跟踪期望的定位。
由于执行器的动态和饱和度极大地影响了机器人的性能,而避免这些影响的方法是控制器的设计时综合考虑这些方面的影响。
根据Lyapunov 稳定性理论,路径跟踪控制律的整体稳定性已经得到证实。
根轨迹方法是用来分析和选择合适的控制器PD的参数,使得机器人的定位可以收敛到一个期望的方向甚至是当车轮速度饱和时。
在现实世界的实验中,机器人受控于沿着一个八字形曲线、以一个恒定的1/m s的平移速度行进,并精确追踪改变定位。
结果表明,所提出的控制方法在执行器的饱和与非饱和的情况下是有效的。
7.参考文献[1] Campion,G.Bastin,G,D’Andréa-Novel,B.轮式移动机器人的运动学和动态模型的分类和结构性能[J].机器人与自动化的IEEE会刊,1996,12:47 -62.[2] Heinemann, P, Rueckstiess, T,Zell, A.快速、准确的环境模块化在全方位系统上的动态认知的引入[D].2004.[3] Indiveri, G., Paulus, J., and Pl¨oger, P. G.瑞典轮式移动机器人在存在执行器饱和的情况下的运动控制[N]. 第十年度RoboCup国际研讨会,2 006.[4] Liu, Y., Wu, X., Zhu, J. J., and Lew, J.通过轨迹线性化的方式设计的全方位移动机器人控制器[N].ACC'03,2003美国控制会议的进程,200 3.[5] Mojaev, A. and Zell, A.非完整移动机器人适应局部导航和跟踪控制[N].IAS-8会议的进程,2004.[6] Muir, P. F. and Neuman, C. P.全方位轮式移动机器人的反馈控制的运动学建模[D].自主机器人车辆,Springer-Verlag,1990.[7] Purwin, O. and Andrea, R. D.四轮式全方位的车辆的根轨迹生成和控制[J].2006:54(1):13-22.[8] Rojas, R.,F¨orster, A. G.机器人的全方位驱动的完整性控制[D].B¨ottc herITVerlag, Bremen,2006.[9] Scolari Conceic¸.ao, A., j. Costa, P., and Moreira, A.. 移动机器人电机在最小乘方和工具变量的控制和模型识别方法[N].MMAR'05在自动化和机器人领域的Metgids abd 模型的十一次国际会议,2005.[10] Scolari Conceic¸.ao, A., Moreira, A., and j. Costa, P.全向移动机器人基于电机的速度限制的轨迹跟踪[N]. SYROCO'06机器人控制,第八次国际农业生产联合会研讨会,2006.[11] Terashima, K., Miyoshi, T., Urbano, J., and Kitagawa, H.全方位轮椅的频率控制增加用户的舒适[N].ICRA'04国际会议在机器人与自动化方面的进程,2004.[12] Tsai, C.-C., Huang, H.-C., Wang, T.-S.,Chen, C.-M.全向移动机器人轨迹规划与控制系统设计[N].计算机辅助通信系统自动控制会议,2006.[13] Watanabe, K.全方位移动机器人控制[N].KES'98在第二次国际会议——基于知识的智能电子系统,1998.。