一种基于模糊运算的车辆防撞预警系统设计
- 格式:pdf
- 大小:1019.82 KB
- 文档页数:10

一种车载智能防碰撞预警系统车载智能防碰撞预警系统是一种基于车辆智能驾驶技术的安全装置,通过感知、识别、判断和预警等功能,帮助驾驶员在行车过程中防患于未然,减少交通事故发生的可能性。
该系统主要由传感器、数据处理单元和人机交互界面组成,并能与车辆的制动、转向和加减速等控制系统无缝连接,实现对驾驶过程的主动干预和风险控制。
车载智能防碰撞预警系统使用了多种传感器技术,例如激光雷达、摄像头和超声波等,能够全方位感知周围环境,并实时获取道路、车辆和行人等信息。
这些传感器可以在各种天气条件下高精度地感知目标物体,为后续的数据处理和决策提供准确可靠的基础。
数据处理单元是车载智能防碰撞预警系统的核心,它通过算法处理传感器采集到的原始数据,提取出有用的特征信息,并进行目标识别、位置跟踪、行为分析等处理。
数据处理单元能够与车载导航系统和交通云平台等外部数据源进行信息融合,实现对路况变化的实时监测和预警。
基于数据处理单元的分析和判断,智能防碰撞预警系统可以生成相应的预警信号,帮助驾驶员及时做出反应。
人机交互界面是车载智能防碰撞预警系统与驾驶员之间进行信息交流和指令传递的桥梁。
通过车载显示屏、语音提示和震动反馈等方式,系统可以向驾驶员提供路况预警、危险提示、换道建议等实时信息,帮助驾驶员增强对潜在危险的感知和应对能力。
系统还可以根据驾驶员的操作和反馈情况,进行自适应调整,提供个性化的预警策略和驾驶辅助功能。
车载智能防碰撞预警系统的工作原理是将感知、识别、判断和预警等环节紧密结合,实现全面的安全监测和风险控制。
当系统感知到前方有障碍物或潜在危险时,通过数据处理和分析,判断当前车辆与目标物体之间的安全距离和碰撞风险,并根据严重程度生成相应等级的预警信号。
这些预警信号可以通过不同的传感器和人机交互界面进行呈现,提醒驾驶员注意道路状况和安全驾驶。
mdvr车辆防碰撞预警系统方案简介MDVR车辆防碰撞预警系统是一种基于监控技术和智能算法的车辆防撞预警系统,它可以通过高清车载摄像头进行实时监控,利用智能算法进行数据分析,从而准确识别车辆碰撞的风险,提醒驾驶员采取相应的行动,以避免车辆碰撞事故的发生。
技术原理MDVR车辆防碰撞预警系统主要基于以下技术原理进行设计和实现:1. 高清车载摄像头MDVR车辆防碰撞预警系统采用高清车载摄像头进行实时监控。
高清车载摄像头具备高清晰度、广角度、夜视功能等特点,可以有效地提高驾驶员观测车辆周边的能力,识别并记录车辆碰撞的情况。
2. 智能算法识别车辆碰撞风险MDVR车辆防碰撞预警系统采用先进的智能算法识别车辆碰撞风险。
该算法能够通过车载摄像头捕捉的视频流数据进行实时分析,并通过图像识别、目标追踪等计算机视觉算法,精准地识别出车辆碰撞风险,判断是否需要发出预警信息。
3. 发出驾驶员预警信息MDVR车辆防碰撞预警系统能够及时发出驾驶员预警信息。
当系统识别到车辆出现碰撞风险时,会向驾驶员发出语音、振动等信息预警,提醒驾驶员采取相应的行动,以避免车辆碰撞事故的发生。
方案特点MDVR车辆防碰撞预警系统具有以下特点:1. 支持多种警告方式MDVR车辆防碰撞预警系统能够支持多种警告方式,如语音、振动等方式进行预警,提醒驾驶员采取相应的行动。
2. 精准识别碰撞风险MDVR车辆防碰撞预警系统采用先进的智能算法,能够精准地识别车辆碰撞风险,可有效降低车辆碰撞事故的发生率。
3. 易于安装和使用MDVR车辆防碰撞预警系统易于安装和使用。
只需要将系统中的摄像头固定在车辆上即可,驾驶员可通过系统进行实时监控和预警操作。
应用场景MDVR车辆防碰撞预警系统适用于各种类型的车辆,在以下场景中应用效果尤佳:1. 工地运输卡车工地运输卡车在运输过程中需要通过道路的大规模交通,驾驶员在视线受阻或者交通拥堵的时候,十分容易发生车辆碰撞的危险。
MDVR车辆防碰撞预警系统可以有效地提高驾驶员识别与控制碰撞风险的能力。
基于模糊算法的车道偏离预警研究随着社会的发展,机动车辆数量的快速增加,交通安全问题变得日益突出。
其中,车道偏离是导致交通事故的主要原因之一。
因此,开发一种可靠的车道偏离预警系统对于提高道路行车安全性至关重要。
本文将基于模糊算法的车道偏离预警研究进行探讨,并提出一种基于模糊逻辑的车道偏离预警方法。
一、引言车道偏离是指行驶中车辆偏离其应行驶的车道,可能造成与其他车辆相撞、碰撞道路设施或行人等事故。
对于驾驶员而言,车道偏离是一种常见的驾驶误差,尤其是在疲劳驾驶、注意力分散等情况下更容易发生。
因此,车道偏离预警系统的研究对于减少交通事故具有重要意义。
二、车道偏离检测方法1. 传统方法传统的车道偏离检测方法主要依靠图像处理技术,通过提取车道线信息进行分析。
这种方法在较为理想的道路条件下表现良好,但在恶劣的天气或夜间光线不足的情况下,会出现一定的识别误差。
此外,传统方法对于曲线道路、复杂交叉口等情况处理效果较差。
2. 基于模糊逻辑的方法基于模糊逻辑的车道偏离预警方法通过引入模糊算法,将模糊推理应用于车道偏离检测中,从而提高了系统的鲁棒性和可靠性。
具体而言,该方法首先使用图像处理技术提取车道线信息,并将其输入模糊控制器中。
模糊控制器通过模糊规则对驾驶员的驾驶行为进行判断,一旦发现车辆偏离了预定的车道,即触发预警系统。
三、基于模糊算法的车道偏离预警系统设计基于模糊算法的车道偏离预警系统主要由以下几个模块组成:1. 图像采集与处理模块该模块负责采集车辆周围的图像,并通过图像处理技术提取车道线信息。
常用的图像处理技术包括Canny边缘检测、霍夫变换等。
2. 特征提取模块特征提取模块将从图像中提取的车道线信息转化为特征向量,以供模糊控制器进行分析和判断。
特征向量通常包含车道线与车辆相对位置、车道宽度、曲率等信息。
3. 模糊控制模块模糊控制模块利用模糊推理方法对特征向量进行判断,并作出针对性的控制决策。
例如,当偏离车道的程度达到一定阈值时,系统将触发警报。
一种车载智能防碰撞预警系统车载智能防碰撞预警系统是一种基于人工智能技术的安全辅助系统,能够识别和预测前方的交通状况,并提供及时的预警和提示,以帮助驾驶员避免碰撞事故的发生。
本文将介绍一种车载智能防碰撞预警系统的工作原理、主要功能和应用场景。
车载智能防碰撞预警系统的工作原理是基于摄像头和雷达等传感器感知前方的车辆和障碍物,然后通过计算机视觉和机器学习等技术对这些信息进行分析和处理,最终生成预警信号和提示信息。
下面将详细介绍这个过程。
系统通过摄像头感知前方的道路状况和车辆情况。
摄像头可以采集道路上的图像和视频,通过图像处理和分析算法可以提取出车辆的位置、速度以及运动轨迹等信息。
还可以使用激光雷达或毫米波雷达等传感器来获取车辆的距离和方位,以进一步增强检测的准确性。
接下来,系统利用计算机视觉和机器学习等技术对感知到的信息进行分析和处理。
计算机视觉技术可以识别和分割图像中的车辆和障碍物,然后通过跟踪算法确定它们的运动轨迹。
机器学习算法可以根据历史数据和训练样本,对车辆和障碍物的运动行为进行建模和预测,从而判断其是否存在碰撞的危险。
系统根据分析和预测的结果生成预警信号和提示信息。
预警信号可以通过声音、震动或显示在中控台上的警告灯等方式进行传递。
提示信息可以显示在车载显示屏上,提醒驾驶员注意前方的危险情况,并采取相应的安全驾驶措施。
车载智能防碰撞预警系统的主要功能包括前方碰撞预警、车道偏离预警和行人识别预警等。
前方碰撞预警可以根据前方车辆的速度和距离等信息,及时提醒驾驶员注意避免追尾事故。
车道偏离预警可以通过识别车载摄像头捕捉到的车道线,并检测车辆是否偏离车道,及时提醒驾驶员进行纠正。
行人识别预警可以通过分析图像和视频中的行人特征,判断行人是否存在于车辆行驶的路径上,并发出及时的预警信号。
车载智能防碰撞预警系统广泛应用于私家车、出租车和商用车等各类汽车。
它可以提供准确的预警和提示信息,帮助驾驶员避免碰撞事故的发生。
![基于模糊神经网络的车辆自动避撞预警算法研究[1]](https://uimg.taocdn.com/6005b7076c85ec3a87c2c53b.webp)
基于模糊PID的汽车防撞设计的开题报告一、研究背景及意义汽车行驶时,常常会出现车辆前方突然出现障碍物、另一辆车或行人等情况,如果车辆无法及时停止或变向,将会带来严重的事故隐患。
因此,如何有效地防止汽车碰撞、提高行车安全性是一个非常重要的研究方向。
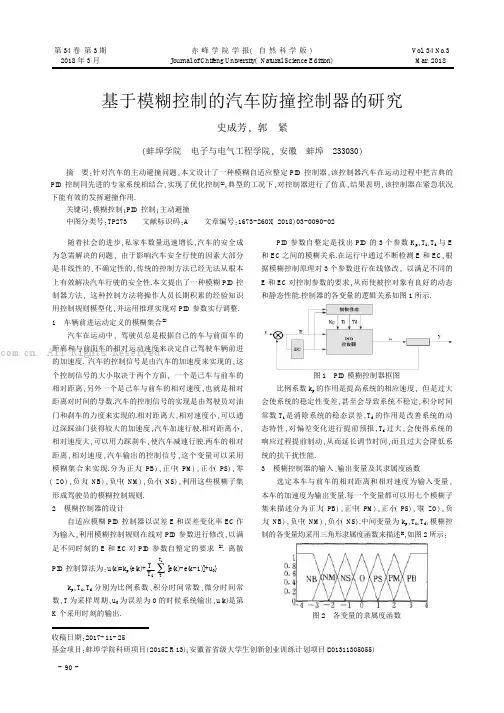
目前已经有不少针对汽车防撞的研究,其中,PID控制算法是一种在工程实际应用中广泛使用的控制算法,因其结构简单、易于实现、适应范围广等优点,被应用于许多汽车控制领域的实际应用。
而模糊PID控制算法则进一步提高了PID控制算法在汽车控制领域的应用性能,可使汽车的控制更加精准、快速、稳定,从而更好地防止碰撞事故的发生。
因此,基于模糊PID的汽车防撞设计研究具有非常重要的理论和实际应用意义。
二、研究内容本研究将针对现有的汽车防撞技术和PID控制算法等研究现状和挑战进行分析和总结,进一步提高PID控制算法的稳定性和精准性,以应对实际驾驶中的各种复杂情况。
具体而言,本研究将通过以下研究内容:1. 对现有汽车防撞技术进行总结和分析,确定研究重点。
2. 分析PID控制算法在汽车防撞控制中的应用,进一步提高其控制性能。
3. 综合考虑所得结论,设计基于模糊PID的汽车防撞控制方案。
4. 在模拟和实验环节对所设计的汽车防撞控制方案进行验证和评估。
5. 最终,对研究结果进行总结和讨论,提出未来研究方向。
三、研究方法和技术路线本研究采用的主要研究方法是仿真研究和实验研究相结合的方法。
具体而言,采用以下技术路线:1. 收集汽车防撞技术相关研究文献,深入分析其优缺点,总结出研究重点。
2. 基于PID控制算法,进行算法原理及其应用的分析和探究,提高其稳定性和精准性。
3. 将PID控制算法与模糊成分相结合,应用于汽车防撞控制中,设计基于模糊PID的汽车防撞控制方案。
4. 在深入分析和有效仿真验证之后,发动汽车进行实验,对所设计的汽车防撞控制方案进行评估和验证。
5. 最终,总结研究结果,归纳出优缺点及未来研究方向,为更好地提高汽车防撞技术的实际应用效果提供参考。
基于模糊神经网络的车辆避撞预警算法
高峰;王江锋;施绍友;王健
【期刊名称】《江苏大学学报(自然科学版)》
【年(卷),期】2006(027)003
【摘要】为实现车辆的智能控制提供理论基础,研究了碰撞预警算法.在分析不同驾驶员的驾驶行为的基础上,确定碰撞预警算法的报警准则,用于指导报警算法做出合理的报警.基于报警准则采用模糊神经网络方法,提出一种多输入、多输出的协作预警算法模型,用于支持碰撞预警系统.利用实测数据对预警算法进行测试,试验结果表明,算法能够对车辆碰撞进行有效的报警,对提高车辆行驶的安全性具有重要意义.【总页数】5页(P211-215)
【作者】高峰;王江锋;施绍友;王健
【作者单位】北京航天航空大学,汽车工程系,北京,100083;北京航天航空大学,汽车工程系,北京,100083;北京航天航空大学,汽车工程系,北京,100083;北京航天航空大学,汽车工程系,北京,100083
【正文语种】中文
【中图分类】U491
【相关文献】
1.基于OpenCV的前方车辆检测和前撞预警算法研究 [J], 刘军;高雪婷;王利明;晏晓娟
2.一种新型车辆智能避撞预警模型设计 [J], 王江锋;高峰;王建
3.基于纵向避撞时间的预警/制动算法 [J], 于广鹏;谭德荣;田厚杰;吕长民
4.车辆避撞超声预警控制器的设计 [J], 宋起超;杨春光;吴志辉
5.一种基于序列图像的车辆避撞预警算法 [J], 姚美红;程国治;于京诺
因版权原因,仅展示原文概要,查看原文内容请购买。
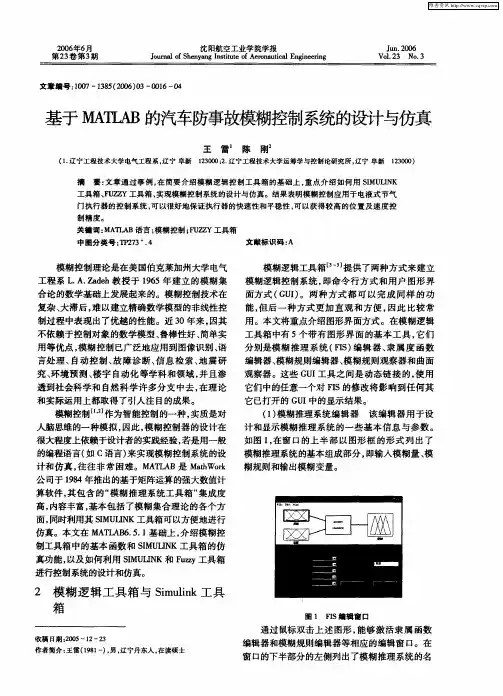
基于图像识别的汽车防撞模糊控制系统及其仿真
罗玉涛
【期刊名称】《华南理工大学学报(自然科学版)》
【年(卷),期】2003(031)010
【摘要】设计了一种基于图像识别的汽车防撞模糊控制系统,建立了安全距离计算的数学模型.该系统由图像识别系统、车速传感器、判断系统和模糊控制模块组成.利用MAT-LAB软件的Simulink仿真工具包,建立了防撞模糊控制系统的仿真模型.通过对汽车运行中4种代表性工况的仿真及分析,验证了系统的可行性及模型的正确性.
【总页数】5页(P41-45)
【作者】罗玉涛
【作者单位】华南理工大学,交通学院,广东,广州,510640
【正文语种】中文
【中图分类】U492.84
【相关文献】
1.基于模糊工具箱和SIMULINK的模糊控制系统计算机仿真 [J], 汪光阳
2.基于MATLAB模糊逻辑工具箱的模糊控制系统仿真 [J], 亢海伟;杨庆芬;王硕禾
3.基于径向基神经网络图像识别的移动机器人控制系统仿真 [J], 刘天
4.基于模糊P ID的冲裁机电液比例位置控制系统仿真研究 [J], 罗艳蕾;杜黎;周山旭;罗坤
5.基于模糊PID的近零能耗建筑能耗控制系统仿真 [J], 王爽;周晓冬;董晶
因版权原因,仅展示原文概要,查看原文内容请购买。