机械原理习题习题三:效率与自锁
- 格式:doc
- 大小:555.50 KB
- 文档页数:5
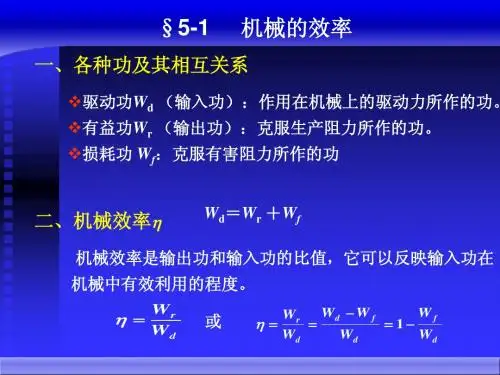
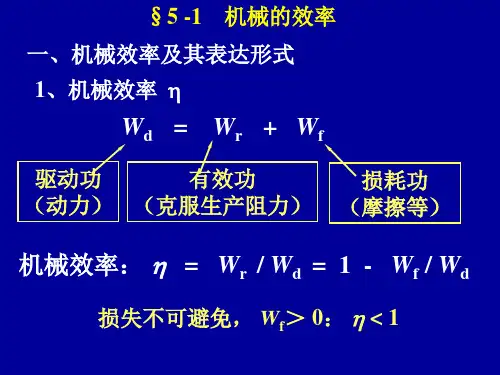
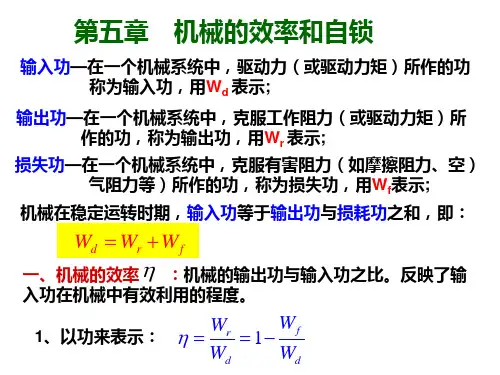
第5章机械的效率和自锁5.1 复习笔记一、机械的效率1.功和效率(1)机械效率①驱动功机械上的驱动功(输入功)为W d,有效功(输出功)为W r,损失功为W f。
则有W d=W r+W f②机械效率a.定义机械的输出功与输入功之比称为机械效率,反映了输入功在机械中的有效利用程度,以η表示。
b.计算方法用功计算时η=W r/W d=1-W f/W d;用功率计算时η=P r/P d=1-P f/P d;式中,P d——输入功率;P r——输出功率;P f——损失功率。
(2)损失率①定义机械的损失功与输入功之比称为损失率,以ξ表示。
②计算方法由定义有ξ=W f/W d=P f/P d。
注:η+ξ=1,由于摩擦损失不可避免,故必有ξ>0和η<1。
(3)效率的简便计算方法为便于效率的计算,可应用下式进行计算η=理想驱动力/实际驱动力=理想驱动力矩/实际驱动力矩①斜面机构正反行程的机械效率分别为η=tanα/tan(α+φ)η′=tan(α-φ)/tanα式中,α——斜面夹角;φ——总反力与法向反力的夹角。
②螺旋机构拧紧和放松螺母时的效率计算式分别为η=tanα/tan(α+φv)η′=tan(α-φv)/tanα式中,α——中径升角;φv——螺旋副的摩擦角。
2.机器(或机组)的效率已知各机构的效率可计算确定整个机构的效率。
常用机构的效率见教材表5-1。
(1)串联①计算公式由k个机器串联组成的机组,设各机器的效率分别为η1、η2、…、ηk,机组的输入功率为P d,输出功率为P r。
则整个串联机组的机械效率为η=P r/P d=(P1/P d)(P2/P1)…(P k/P k-1)=η1η2…ηk②特点a.前一机器的输出功率即为后一机器的输入功率;b.只要串联机组中任一机器的效率很低,就会使整个机组的效率极低;c.串联机器的数目越多,机械效率也越低。
③提高串联机组效率的措施a.减少串联机器的数目;b.优先提高效率最低机器的效率。
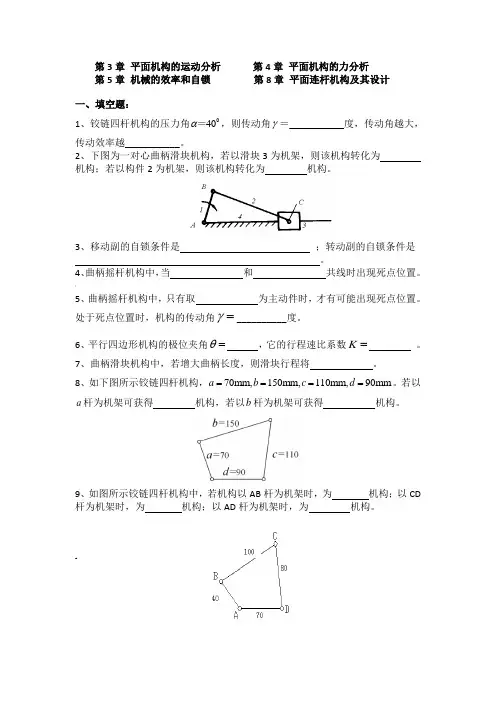
第3章平面机构的运动分析第4章平面机构的力分析第5章机械的效率和自锁第8章平面连杆机构及其设计一、填空题:α=,则传动角γ=___________度,传动角越大,1、铰链四杆机构的压力角040传动效率越___________。
2、下图为一对心曲柄滑块机构,若以滑块3为机架,则该机构转化为机构;若以构件2为机架,则该机构转化为机构。
3、移动副的自锁条件是;转动副的自锁条件是。
4、曲柄摇杆机构中,当和共线时出现死点位置。
:5、曲柄摇杆机构中,只有取为主动件时,才有可能出现死点位置。
处于死点位置时,机构的传动角γ=__________度。
6、平行四边形机构的极位夹角θ=,它的行程速比系数K=。
7、曲柄滑块机构中,若增大曲柄长度,则滑块行程将。
8、如下图所示铰链四杆机构,70mm,150mm,110mm,90mm====。
若以a b c da杆为机架可获得机构,若以b杆为机架可获得机构。
9、如图所示铰链四杆机构中,若机构以AB杆为机架时,为机构;以CD 杆为机架时,为机构;以AD杆为机架时,为机构。
~10、在平面四杆机构中,和为反映机构传力性能的重要指标。
11、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作运动,即得到双曲柄机构。
12、在摆动导杆机构中,若以曲柄为原动件,该机构的压力角为,其传动角为。
13、相对瞬心与绝对瞬心的相同点是,不同点是;在由N个构件组成的机构中,有个相对瞬心,有个绝对瞬心。
/二、判断题:1、对于铰链四杆机构,当机构运动时,传动角是不变的。
()2、在四杆机构中,若有曲柄存在,则曲柄必为最短杆。
()3、平面四杆机构的行程速度变化系数K 1,且K值越大,从动件急回越明显。
()4、曲柄摇杆机构中,若以摇杆为原动件,则当摇杆与连杆共线时,机构处于死点位置。
()5、曲柄的极位夹角θ越大,机构的急回特性也越显著。
()6、在实际生产中,机构的“死点”位置对工作都是不利的,处处都要考虑克服。
§5 机械的效率和自锁填空题:1.设机器中的实际驱动力为rP ,在同样的工作阻力和不考虑摩擦时的理想驱动力为r P 0,则机器效率的计算式是η = r P 0/rP 。
2.设机器中的实际生产阻力为rQ ,在同样的驱动力作用下不考虑摩擦时能克服的理 想生产阻力为r Q 0,则机器效率的计算式是 η= r Q /rQ 0 。
3.假设某机器由两个机构串联而成,其传动效率分别为1η和2η,则该机器的传动效率为 1η*2η 。
4.假设某机器由两个机构并联而成,其传动效率分别为1η和2η,则该机器的传动效率为 (P 1*η1+ P 2*η2)/(P 1+P 2) 。
5. 从受力观点分析,移动副的自锁条件是 外力的作用线与运动方向法线的夹角小于等于摩擦角 ;转动副的自锁条件是 外力的作用线与摩擦圆相切或相割 ;从效率观点来分析,机械自锁的条件是 效率小于等于零 。
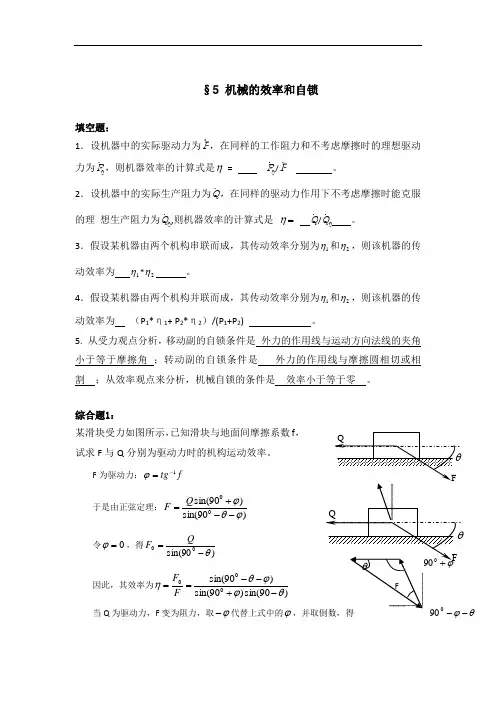
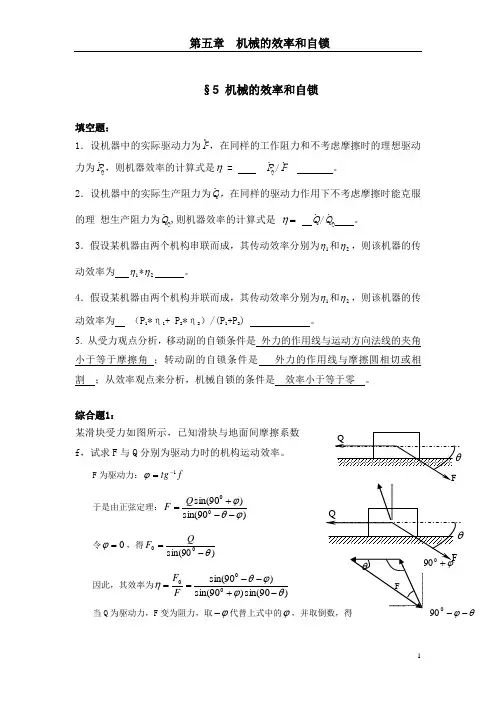
综合题1:某滑块受力如图所示,已知滑块与地面间摩擦系数f ,试求F 与Q 分别为驱动力时的机构运动效率。
F 为驱动力:f tg1-=ϕ于是由正弦定理:)90sin()90sin(00ϕθϕ--+=Q F 令0=ϕ,得)90sin(00θ-=QF 因此,其效率为)90sin()90sin()90sin(00θϕϕθη-+--==F F 当Q 为驱动力,F 变为阻力,取ϕ-代替上式中的ϕθ-)90sin()90sin(90sin(000ϕθϕθη+---==)F F 第四章习题中,综合题5,要求计算该机构效率。
(可直接利用前面的计算结果)0153077.8==-f tg ϕ由正弦定理:)90sin()2180sin(0210ϕβγϕ-=--+R P 和)90sin()2sin(012ϕϕβ+=-R Q 于是Q P *-+*---+=)2sin()90sin()90sin()2180sin(00ϕβϕϕβγϕ代入各值得:N P 7007.1430=取上式中的00=ϕ,可得N P 10000=于是6990.00==PP η综合题2:图 示 为 由 A 、B 、C 、D 四 台 机 器 组 成 的 机 械 系统,设 各 单 机 效 率 分 别 为ηA 、ηB 、ηC 、ηD , 机 器B 、D 的 输 出 功 率 分 别 为N B 和N D 。
§5 机械的效率和自锁填空题:1.设机器中的实际驱动力为rP ,在同样的工作阻力和不考虑摩擦时的理想驱动力为r P 0,则机器效率的计算式是η = r P 0/rP 。
2.设机器中的实际生产阻力为rQ ,在同样的驱动力作用下不考虑摩擦时能克服的理 想生产阻力为r Q 0,则机器效率的计算式是 η= r Q /rQ 0 。
3.假设某机器由两个机构串联而成,其传动效率分别为1η和2η,则该机器的传动效率为 1η*2η 。
4.假设某机器由两个机构并联而成,其传动效率分别为1η和2η,则该机器的传动效率为 (P 1*η1+ P 2*η2)/(P 1+P 2) 。
5. 从受力观点分析,移动副的自锁条件是 外力的作用线与运动方向法线的夹角小于等于摩擦角 ;转动副的自锁条件是 外力的作用线与摩擦圆相切或相割 ;从效率观点来分析,机械自锁的条件是 效率小于等于零 。
综合题1:某滑块受力如图所示,已知滑块与地面间摩擦系数f ,试求F 与Q 分别为驱动力时的机构运动效率。
F 为驱动力:f tg1-=ϕ于是由正弦定理:)90sin()90sin(00ϕθϕ--+=Q F 令0=ϕ,得)90sin(00θ-=QF 因此,其效率为)90sin()90sin()90sin(00θϕϕθη-+--==F F 当Q 为驱动力,F 变为阻力,取ϕ-代替上式中的ϕ,并取倒数,得 QFθQF θQθϕ+090Fθϕ--090φ)90sin()90sin(90sin(0000ϕθϕθη+---==)F F 第四章习题中,综合题5,要求计算该机构效率。
(可直接利用前面的计算结果)0153077.8==-f tg ϕ由正弦定理:)90sin()2180sin(0210ϕβγϕ-=--+R P 和)90sin()2sin(012ϕϕβ+=-R Q 于是Q P *-+*---+=)2sin()90sin()90sin()2180sin(00ϕβϕϕβγϕ代入各值得:N P 7007.1430=取上式中的00=ϕ,可得N P 10000=于是6990.00==PP η综合题2:图示为由A、B、C、D四台机器组成的机械系统,设各单机效率分别为ηA、ηB、ηC、ηD,机器B、D的输出功率分别为N B和N D。
1.利用移动副的自锁条件推出:螺旋副中以轴向载荷Q 为主动力时(即:反行程),螺旋副的自锁条件为式ϕλ≤。
解:当反程时,载荷Q为主动力,P为阻力。
总反力R的方向如图所示。
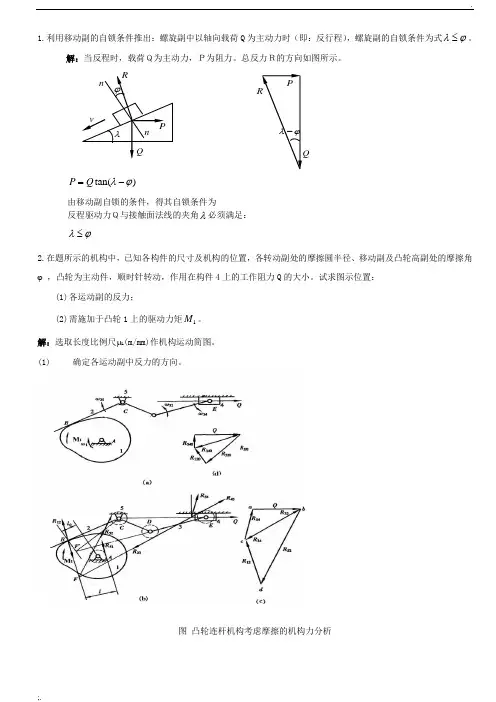
)tan(ϕλ-=Q P由移动副自锁的条件,得其自锁条件为反程驱动力Q与接触面法线的夹角λ必须满足:ϕλ≤2.在题所示的机构中,已知各构件的尺寸及机构的位置,各转动副处的摩擦圆半径、移动副及凸轮高副处的摩擦角ϕ ,凸轮为主动件,顺时针转动,作用在构件4上的工作阻力Q 的大小。
试求图示位置:(1) 各运动副的反力;(2) 需施加于凸轮1上的驱动力矩1M 。
解:选取长度比例尺μL (m/mm)作机构运动简图。
(1)确定各运动副中反力的方向。
图 凸轮连杆机构考虑摩擦的机构力分析ϕλ-vλnQPPRRnϕ由主动件凸轮的转向,确定出机构中各个构件之间的相对运动方向,如图所示。
分析各个构件受到的运动副反力和外力。
构件1受到的力有R 51、R 21、1M ;构件2受到的力有R 52、R 12、R 32;构件3受到的力有R 23、R 43;构件4受到的力有R 34、R 54、Q 。
先确定凸轮高副处点B 的反力R 12的方向,与移动副反力方向确定方法相同,该力方向与接触点处的相对速度V B2B1的方向成900+ϕ角。
再由R 51应切于运动副A 处的摩擦圆,与R 21大小相等方向相反,且对A 之矩的方向与ω1方向相反,确定出R 51的方向。
R 51与R 21形成一个力偶与M 1平衡;由于连杆3为受拉二力构件,其在D 、E 两转动副处所受两力R 23及R 43应切于该两处摩擦圆,大小相等方向相反,在一条直线上。
同时,根据相对转速3432,ωω的方向,可确定出R 23及R 43的作用线和方向,亦即铰链点D 、E 的摩擦圆的内公切线。
;反力R 52应切于运动副C 处的摩擦圆,且对C 之矩的方向应与ω25的方向相反,同时构件2受有的三个力R 12、R 52、R 32应汇交于一点,由此可确定出R 52的方向线;滑块4所受反力R 54应与V 45的方向成900+ϕ角,它受到的三个力R 34、R 54及Q 也应汇交于一点,于是可定出R 54的方向线。
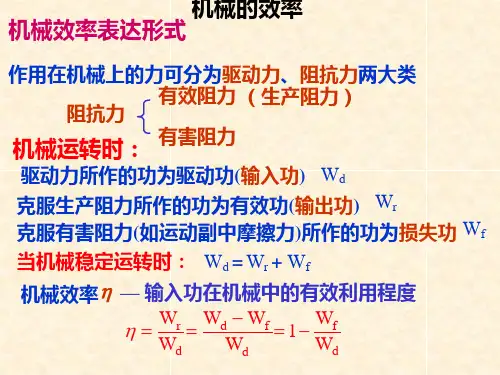
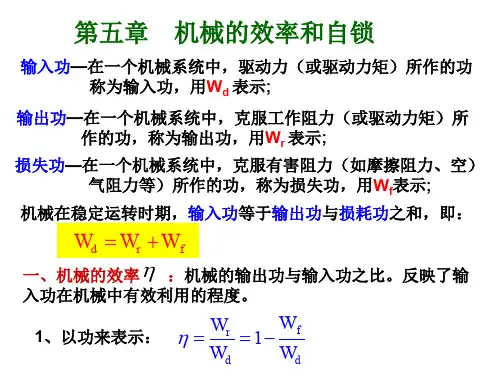
机械运转时:克服生产阻力所作的功为有效功(输出功)驱动力所作的功为驱动功(输入功)克服有害阻力(如运动副中摩擦力)所作的功为损失功W dW rW f 当机械稳定运转时:W d =W r + W f机械效率作用在机械上的力可分为驱动力、阻抗力两大类d r W W =ηdf d W W W -=d f W W 1-=η—输入功在机械中的有效利用程度阻抗力有效阻力(生产阻力)有害阻力d r W W =ηdf d W W W -=d f W W 1-=d r P P =ηdf d P P P -=d f P P 1-=由于损失功W f 或损失功率P f 不可能为零,所以η<1W f 或P f 越大,机械的效率就越低。
因此在设计机械时,为了使其具有较高的机械效率,应尽量减小机械中的损耗,主要是减小运动副中的摩擦损失。
用滚动代替滑动,考虑润滑,合理选材等上下分别除以做功时间则为功率η以功或功率的形式表达F —实际驱动力υF —驱动力作用点沿力作用线方向的速度Q —实际生产阻力υQ —阻力作用点沿力作用线方向的速度d r P P =η FQ F Q υυη=∴起重装置η以力或力矩的形式表达为进一步简化该式,现假设该机械为理想机械,即机械中不存在摩擦。
此时,F 0—为克服同样生产阻力Q 所需的理想驱动力 1F Q F 0Q 0=因为理想机械υυη=由于W f 或P f 为零F0Q F Q υυ=∴显然F 0 < F0d f d d r 1P P P P P ηη==-==∴F F 0F F υυη=F F 0=F Q F Q υυη=F 0起重装置η以力或力矩的形式表达F Q F Q υυη=同理,Q 0—为在同样驱动力F 下克服的理想生产阻力1F Q F Q00=理想机械υυη= 由于W f 或P f 为零FQ 0F Q υυ=∴显然Q 0 > Q 0df d d r 1P P P P P ηη==-==∴Q 0Q Q Q υυη=0Q Q =Q 0起重装置η以力或力矩的形式表达为进一步简化该式,现假设该机械为理想机械,即机械中不存在摩擦。
第五章机械的效率和自锁效率是衡量机械性能优劣的重要指标,而一部机械效率的高低在很大程度上取决于机械中摩擦所引起的功率损耗。
研究机械中摩擦的主要目的在于寻找提高机械效率的途径。
机械的自锁问题及移动副自锁条件的求解是本章的难点之一。
本章知识点串讲【知识点1】机械效率及其计算定义:机械的输出功与输入功之比称为机械效率,η= W r / W d。
性质:η<1(η= 1——理想机器——永动机)表示方法:a. 功表示η= W r / W d = 1- W f/ W db. 功率表示η= p r / p d = 1- p f/ p dc. 力(矩)表示η= F0/ F= M0/ M1)串联机器(组)的总效率等于组成该机器(组)各机械部分效率的连乘积η=η1η2……ηK2)对于并联机构的总效率计算就相对麻烦一点。
N rη= (Nd1η1 + Nd2η2 + …+ NdK ηK) / (Nd1 + Nd 2 + …+ NdK) = (Nd1η1 + Nd2η2 + …+ NdK ηK) / Nd并联机组的效率,不仅与各个机构的效率有关,而且与效率的分配有关3)混联 兼有串联和并联的机构称为混联机构。
为了计算其总效率,可先将输入功至输出功的路线弄清,然后分别计算出总的输入功率和总的输出功率,最后计算其总的机械效率。
【知识点2】机械自锁条件的确定定义:由于摩擦的存在,沿某个方向的驱动力如何增大,也无法使受力对象产生运动的现象——称为机械的自锁。
同学们要注意的是,机械的自锁只是在一定的受力条件和受力方向下发生的,而在另外的情况下却是可动的,也就是说自锁具有方向性。
1)平面自锁条件:(1)当α>φ时,驱动力P 的作用线在摩擦角φ之外。
Px > F ,即滑块加速; (2)当α=φ时,P 与R 共线。
Px = F : a. 滑块等速运动——原本运动; b.静止不动——原不动,具有运动趋势。
(3)当α<φ时,驱动力P 的作用线在摩擦角φ之内。
第三讲平面机构的力分析、效率和自锁平面机构的力分析知识点:一、作用在机械上的力1.驱动力:定义:驱使机械运动的力特征:该力与其作用点速度的方向相同或成锐角,其所作的功为正功,称为驱动功或输入功。
来源:原动机加在机械上的力2.阻抗力:定义:阻止机械产生运动的力称为阻抗力特征:该力与其作用点速度的方向相反或成钝角,其所作的功为负功,称为阻抗功。
分类:生产阻力(有效阻力):有效功(输出功)有害阻力:非生产阻力:损失功二、构件惯性力的确定(考的较少)1、一般力学方法(1) 作平面复合运动的构件对于作平面复合运动且具有平行于运动平面的对称面的构件(如连杆2),其惯性力系可简化为一个加在质心S2 上的惯性力F I2和一个惯性力偶矩M I2, 即F I2 = -m2a S2 , M I2 = -J S2α2也可将其再简化为一个大小等于F I2,而作用线偏离质心S2一距离l h2的总惯性力F′I2,l h2 = M I2/ F I2F′I2对质心S2之矩的方向应与α2的方向相反。
(2) 作平面移动的构件如滑块3,当其作变速移动时,仅有一个加在质心S3上的惯性力F13=-m3a S3。
(3) 绕定轴转动的构件如曲柄1,若其轴线不通过质心,当构件为变速转动时,其上作用有惯性力F I1=-m1a S1及惯性力偶矩M I1=-J S1α1,或简化为一个总惯性力F′I1;如果回转轴线通过构件质心,则只有惯性力偶矩M I1=-JS1α1。
2、质量代换法(记住定义和条件)1.基本定义:(1)质量代换法:按一定条件将构件质量假想地用集中于若干个选定点上的集中质量来代替的方法叫质量代换法。
(2)代换点:选定的点称为代换点。
(3)代换质量:假想集中于代换点上的集中质量叫代换质量。
2.应满足条件(1)代换前后构件的质量不变。
(2)代换前后构件的质心位置不变。
(3)代换前后构件对质心的转动惯量不变。
三、运动副中的摩擦力的确定(受力分析为大题)1.移动副中摩擦力的确定、F f21=f F N21=f v G式中f v为当量摩擦系数。
1.利用移动副的自锁条件推出:螺旋副中以轴向载荷Q 为主动力时(即:反行程),螺旋副的自锁条件为式ϕλ≤。
解:当反程时,载荷Q为主动力,P为阻力。
总反力R的方向如图所示。
)tan(ϕλ-=Q P
由移动副自锁的条件,得其自锁条件为
反程驱动力Q与接触面法线的夹角λ必须满足:
ϕλ≤
2.在题所示的机构中,已知各构件的尺寸及机构的位置,各转动副处的摩擦圆半径、移动副及凸轮高副处的摩擦角 ,凸轮为主动件,顺时针转动,作用在构件4上的工作阻力Q 的大小。
试求图示位置: (1) 各运动副的反力;
(2) 需施加于凸轮1上的驱动力矩1M 。
解:选取长度比例尺L
(m/mm)作机构运动简图。
(1)
确定各运动副中反力的方向。
图 凸轮连杆机构考虑摩擦的机构力分析
ϕ
λ-v
λ
n
Q
P
P
R
R
n
ϕ
由主动件凸轮的转向,确定出机构中各个构件之间的相对运动方向,如图所示。
分析各个构件受到的运动副反力和外力。
构件1受到的力有R 51、R 21、1M ;构件2受到的力有R 52、R 12、R 32;构件3受到的力有R 23、R 43;构件4受到的力有R 34、R 54、Q 。
先确定凸轮高副处点B 的反力R 12的方向,与移动副反力方向确定方法相同,该力方向与接触点处的相对速度V B2B1的方向成900
+角。
再由R 51应切于运动副A 处的摩擦圆,与R 21大小相等方向相反,且对A 之矩的方向与1
方向相反,确定出R 51
的方向。
R 51与R 21形成一个力偶与M 1平衡;
由于连杆3为受拉二力构件,其在D 、E 两转动副处所受两力R 23及R 43应切于该两处摩擦圆,大小相等方向相反,在一条直线上。
同时,根据相对转速3432,ωω的方向,可确定出R 23及R 43的作用线和方向,亦即铰链点D 、E 的摩擦圆的内公切线。
;
反力R 52应切于运动副C 处的摩擦圆,且对C 之矩的方向应与25
的方向相反,同时构件2受有的三个力R 12、R 52、
R 32应汇交于一点,由此可确定出R 52的方向线;
滑块4所受反力R 54应与V 45的方向成900
+角,它受到的三个力R 34、R 54及Q 也应汇交于一点,于是可定出R 54
的方向线。
依照以上的步骤和方法,确定出各个运动副反力的作用线和方向,如图(b )所示。
(2)求各运动副处的反力大小。
分别取构件2、4为分离体,列出力平衡方程式为
构件2 0523212=++R R R ϖ
ϖϖ
构件4 05434=++Q R R ϖ
ϖϖ
而 32234334R R R R ϖ
ϖϖϖ-==-=
根据上述力方程式,选取力比例尺F
(N/mm),从已知力Q 画起,作出力多边形,如题57图(C )所示。
由图
可得各总反力
F i i R R μ=
其中 i R 为力多边形中第i 个力的图上长度(mm)。
(3)求需施加于凸轮1上的驱动力矩1M 。
由凸轮1的平衡条件可得
()Nm l R l R M L
F L μμμ21211==
式中 l 为R 21与R 51两方向线的图上距离,单位为mm 。
3.图所示为按μL =0.001m/mm 画的机构运动简图,滑块3为原动件,驱动力P=80N 。
各转动副处的摩擦圆如图中所
示,滑块与导路之间的摩擦角=0
20 ,试求在图示位置, 构件AB 上所能克服的阻力矩M Q 的大小和方向。
解:首先确定各个运动副中的反力的方向如图所示。
选取构件3为分离体,再选取力比例尺F μ,作出其力多边形,如图所示。
N P R 728020
18
201823=⨯==
构件2为二力杆,所以N R R R R 7223321221==== 最后得构件AB 上所能克服的阻力矩M Q 的大小为
m N l R M l Q ⋅=⨯⨯==72.0001.0107221μ
阻力矩M Q 的方向为逆时针方向,如图所示。
4.图所示为按μL =0.001m/mm 绘制的机构运动简图。
已知圆盘1与杠杆2接触处的摩擦角=0
30 ,各转动副处的摩擦圆如图中所示,悬挂点D 处的摩擦忽略不计。
设重物 Q=150N ,试求出在图示位置时,需加在偏心圆盘上的驱动力矩M 1的大小。
31
R 32
R 32
R 21
R 12
R 12
R Q
Q
l
题59图
Q
M l
01
R 21
R 32
R 23
R P
03
R 03
R 23
R 12
R ϕ
题58图
解:首先确定各个运动副中的反力的方向如图所示。
选取构件2为分离体,再选取力比例尺F μ,作出其力多
边形,如图所示。
N Q R 23115013
20132012=⨯==
依据作用力与反作用的关系,得N R R 2311221== 最后得需加在偏心圆盘上的驱动力矩M 1的大小为
m N l R M l ⋅=⨯⨯==2.3001.014231211μ
5.题60图所示为斜面压榨机。
确定在以Q 为主动力的行程中机
构的自锁条件。
设所有移动副的摩擦角均为
ϕ。
解:首先利用考虑摩擦机构力分析的步骤和方法,求出驱动
力Q 与工作阻力P 之间的关系
)2cot(ϕα-=P Q
理想驱动力为αcot 0P Q =
效率为
α
ϕαηtan )
2tan(0'-==
Q Q 令0'≤η得自锁条件:ϕα2≤。
6.题61图所示机构,作用于构件3上的P 为驱动力,作用于构件1上的Q 为生产阻力。
各转动副处的摩擦圆如图中所示;各移动副处的摩擦系数均为f ,各构件惯性力、重力忽略不计。
(1)机构处于死点位置时,连杆2与水平线之间的夹角θ为多大? (2)机构自锁时,连杆2与水平线之间的夹角θ为多大?
题60图 斜面压榨机力分析
ϕ
21
R 12R 01
R 03
R 32
R 23
R ϕ
β
题61图
解:(1)、机构处于死点位置时,其传动角为零度。
所以连杆2与水平线之间的夹角θ为︒90。
(2)、机构自锁时,应有
ϕβθ≤+-︒)(90
即)(90ϕβθ+-︒≥ 式中:AB
r
l ρβ2arcsin =,)arctan(f =ϕ。
r ρ为摩擦圆的半径,AB l 为连杆AB 的杆长。
所以最后得
))arctan(2(arcsin
90f l AB
r
+-︒≥ρθ。