牛头刨床机构的综合设计与分析
- 格式:doc
- 大小:56.50 KB
- 文档页数:33

机械工程学院机械原理课程设计说明书设计题目:牛头刨床刨刀往复运动机构的分析与设计专业:机械设计制造及其自动化班级:13级姓名:学号指导教师:侍红岩2016年 1 月 4 日目录1 设计任务 (1)1.1 设计题目 (1)1.2 工作原理及工艺动作过程 (1)1.3 原始数据及设计要求 (1)1.4 设计任务 (2)2 系统传动方案设计 (3)2.1 曲柄滑块机构与摆动导杆机构 (3)2.2 齿轮和摆动导杆机构 (4)2.3 执行机构方案的比较 (5)2.4 执行机构方案的确定 (5)3 机构运动简图及数据分析 (7)3.1 机械结构简图 (7)3.2 牛头刨床数据分析 (8)4 机构运动分解 (10)5 主机构受力分析 (11)5.1 各运动副反力 (11)5.2 曲柄机构平衡力矩 (14)参考文献 (16)1 设计任务1.1 设计题目牛头刨床刨刀往复运动机构的分析与设计。
1.2 工作原理及工艺动作过程牛头刨床是一种用于平面切削加工的机床,整个机构的运转是由原动件1带动杆2的,通过连杆3推动滑块4运动;从而实现刨刀的往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
1.3 原始数据及设计要求图1-1已知行程比系数K=1.4原动件曲柄1转速n1=60r/min,刨刀5行程H=400mm,其它参数为,L4=220mm,L5=180mm,L6=350mm,L |3=L3/2,H1=100mm,H2尺寸应满足传动角尽可能大;故刨刀5移动导路位于D点圆弧轨迹弦高一半处;构件重量分别为G2=200N,G5=700N,质心位于S3、S5处;构件3绕质心转动惯量J S3=1.1kg.m2,回程阻力为零,其它忽略不计。
刨刀工作阻力如图1-1所示,回程阻力为零,其它条件忽略不计。
表 11.4 设计任务(1)绘制机构运动简图。
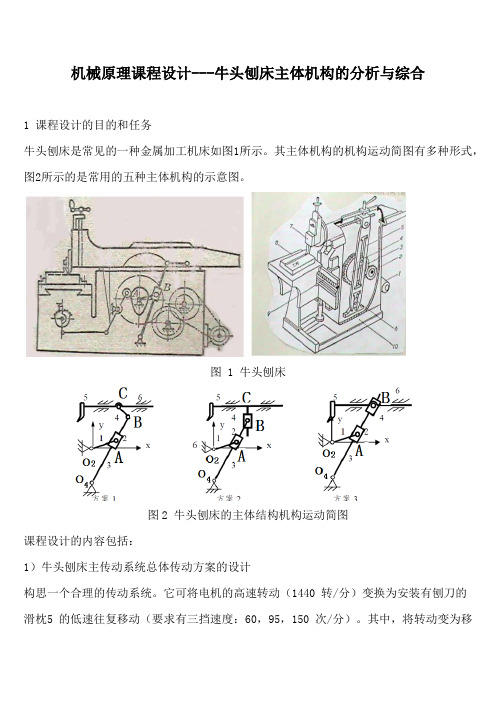
机械原理课程设计---牛头刨床主体机构的分析与综合1 课程设计的目的和任务牛头刨床是常见的一种金属加工机床如图1所示。
其主体机构的机构运动简图有多种形式,图2所示的是常用的五种主体机构的示意图。
图 1 牛头刨床图2 牛头刨床的主体结构机构运动简图课程设计的内容包括:1)牛头刨床主传动系统总体传动方案的设计构思一个合理的传动系统。
它可将电机的高速转动(1440 转/分)变换为安装有刨刀的滑枕5 的低速往复移动(要求有三挡速度:60,95,150 次/分)。
其中,将转动变为移动的装置(主体机构)采用图2 所示的连杆机构。
在构思机构传动方案时,能做到思路清晰,各部分的传动比分配合理,最后在计算机上绘出主传动机构的原理示意图。
2)牛头刨床主体机构的尺度综合已知数据如表1所示图中的参数如图3所示。
图3参数表达形式表13)牛头刨床主体机构的运动分析根据已定出的主体机构的尺度参数,按曲柄处于最低转速、滑枕处于最大行程的工况对主体机构进行运动分析。
设各具有旋转运动的构件对x 轴的转角分别为i i θ , ( 为旋转构件的标号),相应的角速度和角加速度分别为ωi ,εi ;用解析法求出当曲柄转角θ1 从刨刀处于最右侧时起,沿逆时针方向转动每隔100 计算一组运动参数,其中包括:各杆的角位置、角速度、角加速度及刨刀的位置刀s (以最右点为零点)、速度刀v 和加速度刀a ,应用计算机在同一幅图中绘出刨刀的位移曲线、速度曲线和加速度曲线,并分析计算结果的合理性。
4)牛头刨床主体机构的受力分析杆的受力以及质量如表2所示。
已知数据其余构件的质量和转动惯量以及运动的摩擦忽略不计。
假定刨刀在空回行程不受力,在工作行程中所受的阻力为水平力,其大小见图3。
用解析法求出机构处于不同位置时应加在曲柄上的驱动力矩TN 以及各运动副的约束总反力的大小和方向。
图3 刨刀的有效阻力课程设计的主要内容包括:设计任务(包括设计条件和要求);②传动方案的确定;③机构综合的方法和结果;④运动分析的方法和结果;⑤受力分析的方法和结果;⑥结束语;⑦主要参考文献;⑧附件(计算机程序等)。
** 工业大学机械设计课程设计说明书题目:牛头刨床机构的综合设计与分析院(系):机械工程与自动化学院专业班级:数控071学号:070104024学生姓名:********指导教师:* *教师职称:高级工程师起止时间:2009.6.29~2009.7.10目录一、设计题目与原始数据 (2)二、牛头刨床示意图 (3)三、导杆机构设计 (4)四、机构运动分析 (5)五、机构动态静力分析 (11)六、飞轮设计 (16)七、设计凸轮轮廓曲线 (18)八、齿轮设计及绘制啮合图 (19)九、解析法 (22)1.导杆机构设计 (22)2.机构运动分析 (22)3.机构动态静力分析 (25)4.凸轮设计 (26)十、本设计的思想体会 (29)十一、参考文献 (29)十二、附录 (29)一、设计题目与原始数据1、题目:牛头刨床的综合与分析2、原始数据:刨头的行程 H=550mm 行程速比系数 K=1.6机架长 LO2O3=400mm质心与导杆的比值 LO3S4/LO3B=0.5连杆与导杆的比值 LBF /LO3B=0.3刨头重心至F点距离 XS6=160mm导杆的质量 m4=15Kg刨头的质量 m6=58Kg导杆的转动惯量 JS4=0.7Kgm切割阻力 FC=1300N切割阻力至O2的距离 YP=175mm构件2的转速 n2=80rpm 许用速度不均匀系数 [δ]=1/40齿轮Z1、Z2的模数 m12=15mm小齿轮齿数 Z1=18大齿轮齿数 Z2=46凸轮机构的最大摆角φmax=16凸轮的摆杆长 LO4C=140mm凸轮的推程运动角δ=60°凸轮的远休止角δ01=10°凸轮的回程运动角δ'=60°凸轮机构的机架长 Lo2o4=150mm凸轮的基圆半径 ro=55mm凸轮的滚子半径 rr=15mm二,牛头刨床示意图:三、导杆机构设计1、已知:行程速比系数 K=1.6刨头的行程 H=550mm机架长度L O2O3=400mmLo2o3=400mm 连杆与导杆的比 LBF/LO3B=0.3 2、各杆尺寸设计如下A、求导杆的摆角:ψmax =180°*(k-1)/(k+1)=180°*(1.6-1)/(1.6+1)=41.54°B、求导杆长:LO3B1=H/[2sin(ψmax/2)]=550/[2sin(41.54°/2)]=775.48mmC、求曲柄长:LO2A=LO2O3*sin(ψmax/2)=400*sin20.77°=141.85mmD、求连杆长:LBF=LO3B*LBF/LO3B=775.48*0.3=232.64mmE、求导路中心至的距离:LO3M=LO3B-LDE/2=LO3B{1-[1-cos(ψmax/2)]/2}=750.28mmF、取比例尺цL=0.005m/mm在1号图纸右侧画机构位置图,大致图形如下:滑块尺寸:7*10节圆半径:r1=mz1/2=13*18/2=135mm r2=mz2/2=13*56/2=345mm四、机构的运动分析已知:曲柄转速n2=80rpm第4’点: A. 速度分析○1求VA3VA3= VA2= LO2πn/30=141.85×80π/30=1.19m/s○2求VA4→→→VA4= VA3 +VA4A3大小:? 1.19 ?方向:⊥O3A ⊥O2A ∥O3A○3取μv= VA3/Pa3=0.025(m/s)/mm作速度多边形○4求VB用速度影像法求VB○5求VF→→→VF = VB +VFB大小:?√?方向:∥导路⊥BO3 ⊥BF接着速度多边形,由速度多边形求得VF=pf×μv=1.75m/s○6求ω4ω4=ω3= VA4/ LO3A =2.19rod/s 方向:顺时针○7求VA4A3VA4A3=a3a4×μv=0m/s 方向如图所示B. 加速度分析○1求akA4A3akA4A3=2ω4VA4A3=2×2.19×0=0m/s2 方向如速度图所示○2求aA3 aA3= aA2=ω22×L02A=9.96m/s ○3 anA4anA4=ω32×L03A=2.192 *542*0.005=2.6○4求Aa4 →→→→→anA4 + atA4 = aA3 + akA4A3+ arA4A3大小:1.188 ? 9.96 0 ?方向:A→O3 ⊥AO3 A→O2 如图∥O3A○5取μa =0.1(m/s2)/mm画加速度多边形○6求aB如图所示用加速度影象法求aB=3.7m/s2○7求AF→→→→aF = aB + anFB + atFB大小:? 3.7 Vfb2/lFB ?方向:水平√ F→B ⊥BF○8接着画加速度多边形,由加速度多边形求得:aF =p,f,×μa=0.35m/s2第7点:A速度分析○1求VA3VA3= VA2= LO2Aπn/30=1.188m/s○2求VA4→→→VA4= VA3 +VA4A3大小:? 1.19 ?方向:⊥O3A ⊥O2A ∥O3A○3取μv= VA3/Pa3=0.025(m/s)/mm作速度多边形○4求VB用速度影像法求VB○5求VF→→→VF = VB +VFB大小: ? 1.4 ? 方向: 水平 如图 ⊥BF接着速度多边形,由速度多边形求得:VF=pf ×μv =1.32m/s ○6求ω4ω4=ω3= VA4/ LO3A =1.6rod/s 方向:顺时针 ○7求VA4A3VA4A3=a3a4*μv =0.95m/s 方向如图所示 B. 加速度分析 ○1求akA4A3akA4A3=2ω4VA4A3=2×1.6×0.95=3.04 m/s2 方向如速度图所示○2求aAaA3= aA2=ω22×L02A= 10.0m/s2○3 anA4 a n A4=ω32×L 03A =1.22 m/s 2○4求A a4 → → → → → a n A4 + a t A4= a A3 + a k A4A3 + a r A4A3大小:√ ? 10.0 3.04 ? 方向:A →O 3 ⊥AO 3 √ 如图 ∥O 3A○5取μa=0.1(m/s 2)/mm 做力的的多边形: a A4=pa 4×μa=4.8m/s2○6 求a B 用加速度影象法求a B =9.8m/s 2 ○7求A F → → → → a F = a B + a n FB + a t FB 大小:? 9.8 Vfb 2/LFB ? 方向:水平 √ F →B ⊥BF○8接着画加速度多边形,由加速度多边形求得:aF=p,f,×μa=9.1m/s2第12点: A. 速度分析○1求VA3 VA3= VA2= LO2πn/30=1.19m/s○2求VA4→→→VA4= VA3 +VA4A3大小:? 1.19 ?方向:⊥O3A ⊥O2A ∥O3A○3取μv= VA3/Pa3=0.02(m/s)/mm 作速度多边形○4求VB 用速度影像法求VB○5求VF→→→VF = VB +VFB大小:? 1.38 ?方向:∥BF √⊥BF接着速度多边形,由速度多边形求得VF=pf×μv=1.3m/s ○6求ω4ω4=ω3= VA4/ LO3A =2.1rod/s 方向:逆时针○7求VA4A3VA4A3=a3a4×μv=0.98m/s方向如图所示B. 加速度分析○1求a kA4A3a kA4A3=2ω4VA4A3=4.12 m/s2方向如速度图所示○2求aA3aA3= aA2=ω22×L02A=10.0m/s2○3 a nA4 a nA4=ω32×L03A=1.39m/s2○4求Aa4→→→→→a nA4 + a tA4= aA3+ a kA4A3+ a rA4A3大小:√? 10.0 √ ?方向A→O3⊥AO3√如图∥O3A○5取μa =0.2(m/s2)/mm画加速度多边形:○6求aB 如图所示用加速度影象法求aB=31m/s2○7求AF→→→→a F = aB+ a nFB+ a tFB大小:? 31 Vfb2/LFB ?方向:水平√ F→B ⊥BF○8接着画加速度多边形,由加速度多边形求得:aF=p,f,×μa=31.4m/s2 收集同组同学的位移、速度、加速度的数据并汇编如下页表:五、机构的动态静力分析已知:m6=58Kg m4=15Kg(其余质量忽略不计)导杆绕重心的转动惯量 J4S=0.7kgm 切削主力为常数大小为 Fc=1300N 确定惯性力、惯性力矩第7点P6I=-m6*a F=-58*-8.03=493NP 4I = -m 4*a S =-15*4.9=-73.5NM 4I =-J 4S *α4=-0.7*-4.8/0.475=7.1NM h= M 4I / P 4I =7.1/73.5=0.1M 第12点P 6I =-m 6*a F =-58*31=-1832.8N P 4I = -m 4*a S =-15*15.5=-232.5N M 4I =-J 4S *α4=-0.7*1.72/0.305=-28NM h= M 4I / P 4I =28/232.5=0.12M 将计算结果汇总在如下表中查指导书得齿轮2的重量G 2=500N 3、确定各运动副反力 第7点:A 、取构件5、6为示力体 在机构位置图上方绘制示力体图比例尺为:μL =0.005m/mmR →45+R →76+P →I6+G →6+F →C=0上式中只有R 45、R 76的大小未知取力比例尺: μp =F C /ab =20N/mm在机构位置图下面画力多边形大致图形如图,求得:R 45=de *μp =42*20 =840N方向与力多边形中de 的方向一致R 76=ea *μp =20*32=640N 方向:垂直导路上 ∑FM =0F C (L M O 2-Y P )+G 6X 6x = R 76h 76h 76= [F C (L M O 2-Y P )+G 6X 6x ]/ R 76 B 、取构件3、4为示力体: 在机构位置图右侧绘制示力体图比例尺为 μL =0.005m/mmR →54+G →4 +R →23+P →I4 +74R =0∑3o M=0 (确定R 23的大小)R 23L 3O +PI4 h P + G 4h 4= R 54h 54量得h 4=0.11m h p =0.475 m h 54=0.76mR 23=(R 54h 54-P 14’h p -G 4h 4)/L A O 3=1140N 矢量式中R 74的大小和方向未知 仍取力比例尺μp =20N/M接着力比例尺多边形图,求得:R 74=he *μp =28*20=560N 方向与力多边形中he 的方向一致 C 、取构件2为示力体 在机构位置图右下方绘示力体图比例尺为:μL =0.005m/mmR →32+R →72+P →b+G →2=02O M∑ =0(确定R 23的大小):R32h32=Pbrb量得:32h =0.085M b r=0.31Mb P =32R 32h /br =617N式中72R 的大小和方向未知仍然取比例尺P μ=20N/m 接着画力多边形图,求得:72R =j i ×Pμ=60×20=1200N方向与力多边形中ij 的方向一致 第12点: A 、 取构件5、6为示力体在机构位置图十方绘制势力题示力体图, 比例尺为L μ=0.005m/mm 6G +6I P +45R +76R=0上式中只有45R 、76R的大小未知取比例尺P μ= F C /ab =20N/mm R 45=cd*μp =1800N 方向与力多边形中cd 的方向一致 R 76=ad*μp =660N 方向:垂直导路上 ∑FM =0F C (L M O 2-Y P )+G 6X 6x = R 76h 76h 76= [F C (L M O 2-Y P )+G 6X 6x ]/ R 76 =0.14m B 、取构件3、4为示力体在机构位置图右侧绘制示力体图 比例尺为 μL =0.005m/mmR →54+G →4 +R →23+P →I4 =0∑3o M=0 (确定R 23的大小)R 23L 3O +PI4 h P + G 4h 4= R 54h 54R 23=(R 23h 54-P 14’h p -G 4h 4)/L A O 3 =4640N矢量式中R 74的大小和方向未知 仍取力比例尺μp =20N/M 接着力比例尺多边形图,求得:R 74=gf*μp =2740N 方向与力多边形中fg 的方向一致 C 、取构件2为示力体 在机构位置图右下方绘示力体图比例尺为:μL =0.005m/mm其平衡方程为 32R +b P +2G +72R=0∑2O M=0(确定bP 的大小):32R +32h =b P br量得:32h =0.08m b r =0.32 b P =32R 32h /b r=1160N 上式中只有72R 的大小和方向未知仍然取比例尺P μ=20N/m 接着画力多边形图,求得:72R =id ×P μ=210×20=4200N方向与力多边形中id 的方向一致 4、将各运动副反力汇总如下:5、计算平衡力偶矩并汇总如下:6、绘制平衡力偶矩曲线b-2该曲线在#1图纸右上角六、飞轮设计已知:许用速度不均匀系数 [δ]=1/40平衡力矩曲线 Mb-δ2驱动力矩为常数曲柄的转数 n2=80rpm飞轮装在齿轮Z1的O1轴上1、作等效阻力矩曲线Mr-δr由于飞轮准备装在Z1的O1轴上,因此|Mr|=|Mb/i12|可由Mb-δ2曲线直接画出Mr-δ1曲线(见A1图)。
牛头刨床机构的分析与综合一、课程设计的目的和任务1、目的机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。
其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
2、任务本课程设计的任务是对牛头刨床的机构选型、运动方案的确定;对导杆机构进行运动分析和动态静力分析。
并在此基础上确定飞轮转惯量,设计牛头刨床上的凸轮机构和齿轮机构。
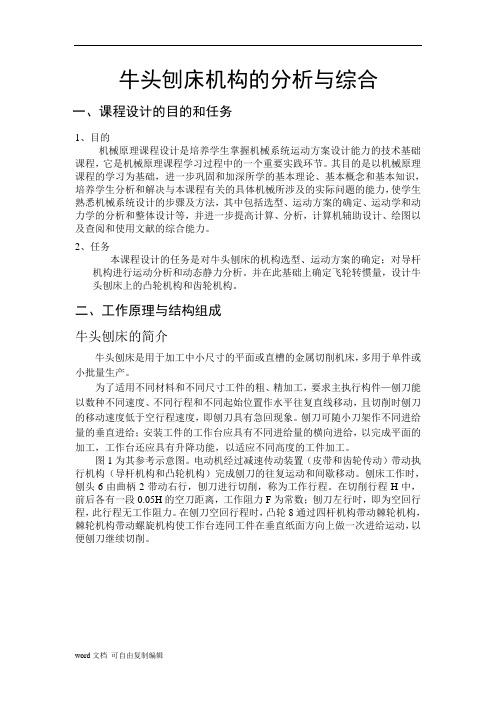
二、工作原理与结构组成牛头刨床的简介牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。
刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。
图1为其参考示意图。
电动机经过减速传动装置(皮带和齿轮传动)带动执行机构(导杆机构和凸轮机构)完成刨刀的往复运动和间歇移动。
刨床工作时,刨头6由曲柄2带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时,凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。
图1三、设计方案的确定方案(a)采用偏置曲柄滑块机构。
结构最为简单,能承受较大载荷,但其存在有较大的缺点。
牛头刨床平面机构的设计与分析引言:牛头刨床平面机构是一种常见的木工加工设备,用于对木材表面进行刨削加工。
在牛头刨床平面机构中,刀具通过机构运动,将工件表面的不平整部分削平,使其具有更加光滑的表面质量。
牛头刨床平面机构的设计与分析对于提高机械加工效率、确保加工质量以及降低设备故障率具有重要意义。
一、牛头刨床平面机构的设计要素1.刀具部分设计:刀具部分是牛头刨床平面机构的关键部分,设计合理与否直接影响到加工质量和效率。
刀具部分包括刨刀和刨刀架。
刨刀的选择要考虑到刨削材料的硬度和机床的工作状态。
刨刀架则需要具备刀具安装方便、切削力平稳传递等特点。
2.主动件设计:主动件主要是传动装置,包括电机、减速器、皮带等。
电机要选择合适的功率和转速,确保机床的正常运转。
减速器可以通过传动比选择来调整机床的切削速度。
皮带的选择要考虑到传动效率和寿命,以及对机床的振动和噪音影响。
3.机构设计:牛头刨床平面机构的机构设计要考虑到机床运动的稳定性和刨削质量。
机构设计的关键是选择合适的导轨和导向方式,确保刨削过程中的工作台和刀具的稳定性。
同时,机构设计还需要考虑到切削力和振动等因素的影响,以减小机床的故障率。
二、牛头刨床平面机构的分析方法1.动力学分析:动力学分析可以通过建立相应的运动学方程和动力学方程,研究机械零件的运动状态和力学特性。
动力学分析可以帮助我们评估机床的运动稳定性和工作状态,以及切削力和振动等因素的影响。
2.有限元分析:有限元分析是一种基于计算机模拟的工程分析方法,可以对机床的结构进行力学和热力学分析。
有限元分析可以评估机床在工作过程中的受力情况和变形程度,为机床结构的优化设计提供参考。
3.模态分析:模态分析是一种研究机械结构动态特性的方法,可以分析机床的固有频率和振型。
模态分析可以帮助我们评估机床的动态性能,以及对切削力和振动等外界扰动的响应能力。
4.可靠性分析:可靠性分析可以通过统计学的方法,评估机床的故障率和寿命。

牛头刨床的设计与分析4点
1. 结构设计:牛头刨床的基本结构由主轴、刨刀、固定床、滑枕等组成。
其设计要求主轴厚度足够,能承受刨削时的载荷和振动,刀架刚性好,能保证刀具和工件之间的正常距离和角度。
2. 刀具系统设计:牛头刨床的刀具系统是其工作的核心部分。
刨刀应选用具有较好的强度和硬度的材料,以防止切削过程中的变形、磨损和断裂等现象。
3. 稳定性分析:牛头刨床在使用过程中,需要具有较好的稳定性和抗震性能。
其结构必须具备足够的刚性和强度,才能保证刨削平稳、精度高、生产效率高。
4. 性能优化:牛头刨床的性能优化主要包括减少工具运行故障的机率、提高加工效率以及提升刨削平面的质量等方面。
可通过合理的结构优化、工艺改善、加工参数优化等措施来实现。
机械原理课程设计编程说明书设计题目:牛头刨床导杆机构的设计及运动分析(4)目录一、计任务及要求……………………………………………………二、数学模型的建立………………………………………………三、程序框……………………………………………………四、程序中符号说明…………………………………………五、程序清单及运行结果………………………………………六、课程设计总结………………………………………………七、参考文献………………………………………………牛头刨床导杆机构运动分析一、设计任务及要求:已知:牛头刨床的导杆机构的曲柄每分钟转速n2,各构件尺寸及重心位置,且报头导路x-x位于导杆端点B所作圆弧的平分线上。
数据如下表所示:设计内容导杆机构运动分析单位r/min mm符号n1 LO2O4LO2A LO4B LBE LO4S4数据70 400 95 800 256400要求:1、用c语言编写计算程序,对机构进行动态分析和动态显示。
2、上机调试程序并打印结果。
3、画出导杆4的角位移,角速度,角加速度的曲线。
4、编写设计计算说明书。
二、 数学模型的建立:ABCXa b d Z 2Z 1Z 3βαY该牛头刨床导杆机构为六杆机构,拆分成两个四杆机构:1)摆动导杆机构;2) 曲柄滑块机构。
求导杆4的角位移,角速度,角加速度,分析摆动导杆机构。
如图所示建立坐标。
三个向量构成封闭图形,所以可得:O Z Z Z =−→−+−→−-−→−342 (1)按复数形式可以写成:上式可以简化为,900)sin (cos )sin (cos )sin (cos 333︒==+++-+θθθϕϕααi d i b i a,求解得)式对时间求二阶导数将(得)对时间求一阶导数,将(联立解得)()(相等得)式中实部、虚部分别根据()(。
2)8)(sin()7)(cos(.2)6(sin 2)5(cos sin )4(),3(40sin sin 30cos cos 220)sin (cos )sin (cos )sin (cos 2242233ϕαωϕαωωαααϕϕαϕαθθϕϕααϕ--=-=++=+==+-=-=+++-+=a b v ad d a b a a d arctgd b a b a i d i b i a A ba)9](2)sin()cos([142224ωϕαωϕαξϕξA v a a b----==。
机械原理课程设计说明书-牛头刨床的运动分析与设计一、设计目标本机械原理课程设计的目标是对牛头刨床进行运动分析与设计,通过分析刨床的运动原理和结构特点,设计出合理的刨床结构,确保刨床的运动稳定性和工作效率。
二、刨床的运动分析1. 刨床的基本运动牛头刨床的基本运动包括主轴转动、工作台进给运动和刀架进给运动。
主轴转动通过电动机驱动刨刀进行旋转,实现刨削工作。
工作台进给运动使工件在水平平面上进行进给运动,供刀架进行刨削。
刀架进给运动使刀架在垂直于工作台的方向上进行进给,并在工件刨削时左右平移,调整刨削的位置。
2. 刨床的运动传动刨床的运动传动主要通过齿轮传动和导轨传动实现。
主轴转动通过电动机通过齿轮传动带动主轴实现。
工作台进给运动通过齿轮和导轨的组合实现,工作台在导轨上进行水平移动。
刀架进给运动通过螺杆和导轨的组合实现,螺杆带动刀架进行垂直平移,并在导轨上进行水平移动。
三、刨床结构设计基于上述运动分析,对牛头刨床进行结构设计如下:1. 主轴结构:主轴采用直径大、刚度高的优质轴承,保证刨床的稳定性和工作效率。
主轴和电动机通过齿轮传动连接,确保刨床主轴的转动平稳。
2. 工作台结构:工作台采用结实的铸铁材料,设计为可拆卸结构,方便工件的放置和取出。
工作台通过导轨和齿轮传动实现水平进给运动,导轨和齿轮选用耐磨材料,减小运动阻力。
3. 刀架结构:刀架采用铸铁材料,设计为可调节结构,方便调整刨削位置。
刀架通过螺杆和导轨的组合实现垂直进给运动和水平进给运动,确保刀具与工件的接触面平整。
四、设计流程1. 进行刨床的运动分析,确定刨床的基本运动和运动传动方式。
2. 根据运动分析结果,进行刨床的结构设计,包括主轴结构、工作台结构和刀架结构。
3. 设计刨床各部件的尺寸和连接方式,确保结构的牢固性和可拆卸性。
4. 进行刨床的总体装配和调试,确保刨床的运动平稳和工作效率。
5. 测试刨床的性能和稳定性,进行必要的调整和改进。
五、安全注意事项1. 在使用刨床时,应仔细阅读操作指南,并按照操作规程进行操作。
机械原理牛头刨床课程设计总结机械原理课程设计总结:牛头刨床在机械原理课程设计中,我选择了牛头刨床作为设计对象。
牛头刨床是一种传统的木工加工工具,用于平整、修整和表面加工木材。
以下是我对该课程设计的总结:1. 目标设定:在设计之初,我确定了设计的目标,包括实现牛头刨床刨削木材的基本功能、提高运行效率、确保操作安全,并考虑到结构合理性和使用便捷性。
2. 设计步骤:我按照设计流程进行了系统的设计。
首先,分析了牛头刨床的结构和工作原理,研究了必要的机械原理知识。
然后,进行了设计参数的选择和计算,包括电机功率、传动装置、刀具转速等。
接下来,进行了牛头刨床的机构设计,包括床身、导轨系统、转动机构等。
最后,完成了整体布局和零部件的详细设计,并绘制了相应的制图和工程图纸。
3. 材料选择:在设计中,我选择了适用于牛头刨床的耐磨、高强度材料,例如优质钢材和工程塑料。
这些材料既能满足牛头刨床的使用要求,又能提高其耐用性和稳定性。
4. 功能优化:在设计的过程中,我注重优化牛头刨床的功能。
例如,采用可调节的工作台设计,使其适应不同尺寸的木材加工;添加安全装置,如紧急停机按钮和防护罩,确保操作人员的安全;考虑电机的启动和停止控制,提高刨削过程的精确性和稳定性等。
5. 制造和装配:最后,我将设计方案转化为实际的制造和装配过程。
根据设计图纸,选择合适的工具和设备进行材料加工、零部件制造和装配。
在制造和装配过程中,我注重工艺的选择和工序的安排,以确保牛头刨床的质量和性能。
通过这次机械原理课程设计,我深入了解了牛头刨床的工作原理和结构设计,提高了机械设计的能力,学会了运用机械原理知识解决工程实际问题。
同时,我也认识到了在设计过程中需要考虑到多个因素的综合影响,包括机械原理、结构设计、材料选择、功能优化和制造工艺等。
这对我的专业发展和将来的工作都具有重要的意义。
西南交通大学本科教学改革《机械原理》课程设计说明书年级: 2011级学号: 20116315姓名: 王和平专业:机电一体化指导老师: 何俊2013 年 12 月《机械原理》课程设计任务书班级机电一班学生姓名王和平学号20116315发题日期: 2013 年9月20日完成日期: 12月10 日题目牛头刨床机构的分析与综合1、本设计的目的、意义机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。
其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
2、学生应完成的任务本课程设计的任务是对牛头刨床的机构选型、运动方案的确定;对导杆机构进行运动分析和动态静力分析。
并在此基础上确定飞轮转惯量,设计牛头刨床上的凸轮机构和齿轮机构。
摘要牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。
本文根据牛头刨床这一特性,设计了三种不同的机构,通过对比分析,选择了酸菜动导杆机构和摇杆滑块机构串联而成的机构。
该方案传力特性好,机构系统所占空间小,执行件的速度在工作行程中变化也较缓慢。
根据已给的数据算出符合运动条件的机构杆长,凸轮基圆,齿轮传动比,建立三维模型,用adms建模,得出位移线图,速度线图,再根据位移线图利用反转法求出凸轮外形,并用cad画出图形关键字:牛头刨床杆长凸轮adams 线图AbstractShaperis used for metal cutting machine toolplane machinin gof small size or straight groove, used for single or small bat ch production. In order to coarse,fine processing of different materials anddifferent size workpieces, require the main executioncomponent planes to several differentspeed,differentdistance and different initial positions of horizontal reciprocating linear motion,and the cutting speed is lower than the air speed planingplaning tool, namelythe quick return phenomenon. In this paper, accordingto the characteristics ofshaper, design three different agencies, through comparative analysis,choose the pickled cabbage moving guide rod mechanism and the rockerslider mechanism formedby series connection mechanism. The forcetransmission charact eristics, mechanism, small occupied space, theactuatorvelocity changes in working process is slow.According to the given data calculated in line with the mov ement condition of the mechanism, the cambase circle, gear ratio, establish the three-dimensional model, using ADMS modeling,so out of line drawing, speed line chart, accordi ng to the linegraph using the inversion method for cam pro the figure painting with CADKeywords: shaper rod cam adams diagram目录第1章绪论............................................................1 1.1问题的提出...................................................1 1.2国内外研究现状................................................1 1.2本文研究的主要内容、目标与方法................................2第2章设计方案的确定...............................................32.1备选方案.....................................................32.1.1方案a........................................... (3)2.1.2方案b................................................. (3)2.1.3方案c....................................................42.2 方案确定.....................................................42.2.1机构方案确定.......................................... (4)2.2.2减速方案的确定........................................ (4)第3章确定机构尺寸................................................53.1根据所给数据确定杆长..........................................53.2建模.................................................... (6)3.3凸轮设计................................................... (6)3.3.1原理......................................................63.3.2基圆半径............................................... (6)第4章运动分析及公式推理..........................................7 4.1导杆........................................................7第5章静力分析....................................................95.1曲柄..........................................................9 5.2导杆..........................................................95.3滑块.........................................................10 5.4连杆...................................................... (10)第6章分析结果...................................................12 6.1 位移线图.................................................. (12)6.2 速度线图.....................................................126.3 加速度线图...................................................13 6.4 力矩变化曲线........................................... (13)6.5 根据反转法画凸轮和滚子.......................................14结论...................................................................15总结.............................................................15参考文献...........................................................16第1章绪论1.1问题的提出牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
牛头刨床机构的综合设计与分析** 工业大学机械设计课程设计说明书题目:牛头刨床机构的综合设计与分析院:机械工程与自动化学院专业班级:数控071学号:070104024学生姓名:********指导教师:* *教师职称:高级工程师起止时间:~辽宁工业大学课程设计说明书目录一、设计题目与原始数据………………………………………………………2 二、牛头刨床示意图……………………………………………………………3三、导杆机构设计………………………………………………………………4四、机构运动分析………………………………………………………………5 五、机构动态静力分析…………………………………………………………11 六、飞轮设计……………………………………………………………………16 七、设计凸轮轮廓曲线…………………………………………………………18 八、齿轮设计及绘制啮合图……………………………………………………19 九、解析法………………………………………………………………………22 1.导杆机构设计………………………………………………………………22 2.机构运动分析………………………………………………………………22 3.机构动态静力分析…………………………………………………………25 4.凸轮设计………………………………………………………….………26 十、本设计的思想体会…………………………………………….…………29 十一、辽宁工业大学课程设计说明书滑块尺寸:7*10节圆半径:r1=mz1/2=13*18/2=135mm r2=mz2/2=13*56/2=345mm四、机构的运动分析已知:曲柄转速n2=80rpm 5 辽宁工业大学课程设计说明书第4’点: A. 速度分析○1求V A3 V A3= V A2= LO2πn/30 =×80π/30 =/s○2求V A4 →→ → V A4= V A3 +V A4A3 大小:??方向:⊥O3A ⊥O2A ∥O3A ○3取μv= V A3/Pa3=(m/s)/mm作速度多边形○4求VB 用速度影像法求VB ○5求VF →→ → VF = VB +VFB 大小:?√ ?方向:∥导路⊥BO3 ⊥BF 接着速度多边形,速度多边形求得VF=pf×μv=/s○6求ω4 ω4=ω3= V A4/ LO3A =/s○7求V A4A3 V A4A3=a3a4×μv=0m/s B. 加速度分析○1求akA4A3 akA4A3=2ω4V A4A3=2××0=0m/s2○2求aA3aA3= aA2=ω22×L02A=/s ○3 anA4anA4=ω32×L03A= *542*= - 6 - 方向:顺时针方向如图所示方向如速度图所示辽宁工业大学课程设计说明书○4求Aa4→ → → →→ anA4+ atA4 = aA3 + akA4A3+ arA4A3 大小:?0?方向:A→O3 ⊥AO3 A→O2 如图∥O3A ○5取μa =(m/s2)/mm画加速度多边形○6 求aB 如图所示用加速度影象法求aB=/s2 ○7求AF → → →→ aF = aB + anFB+ atFB 大小:?Vfb2/lFB ?方向:水平√ F→B⊥BF○8接着画加速度多边形,加速度多边形求得:aF =p,f,×μa=/s2第7点:A速度分析○1求V A3 V A3= V A2= LO2Aπn/30 =/s ○2求V A4→ →→ V A4= V A3 +V A4A3 大小:??方向:⊥O3A ⊥O2A ∥O3A ○3取μv= V A3/Pa3=(m/s)/mm作速度多边形○4求VB 用速度影像法求VB ○5求VF → → →7 辽宁工业大学课程设计说明书VF = VB +VFB 大小:??方向:水平如图⊥BF 接着速度多边形,速度多边形求得:VF=pf×μv =/s○6求ω4 ω4=ω3= V A4/ LO3A =/s○7求V A4A3 V A4A3=a3a4*μv =/s B. 加速度分析○1求akA4A3 akA4A3=2ω4V A4A3=2××= m/s2○2求aA aA3= aA2=ω22×L02A= /s2○3 anA4 anA4=ω23×L03A= m/s2○4求Aa4→→ → → → ankrA4 + atA4= aA3 + aA4A3 + aA4A3 大小:√??方向:A→O3 ⊥AO3 √ 如图∥O3A ○5取μa=(m/s2)/mm做力的的多边形:aA4=pa4×μa=/s2○ 6 求aB用加速度影象法求aB=/s2 ○7求AF → → →→ aF = aB + anFB+ atFB 大小:?Vfb2/LFB ?方向:水平√ F→B ⊥BF 8 方向:顺时针方向如图所示方向如速度图所示辽宁工业大学课程设计说明书8接着画加速度多边形,加速度多边形求得:○aF =p,f,×μa=/s2第12点: A. 速度分析1求V A3V A3= V A2= LO2πn/30=/s ○○2求V A4 → → → V A4= V A3 +V A4A3 大小:??方向:⊥O3A ⊥O2A ∥O3A ○3取μv= V A3/Pa3=(m/s)/mm○4求VB○5求V F → → → VF = VB +VFB 大小:??方向:∥BF√⊥BF 接着速度多边形,速度多边形求得VF=pf×μv=/s○6求ω4 ω4=ω3= V A4/ LO3A =/s 方向:逆时针○7求V A4A3 V A4A3=a3a4×μv=/s 方向如图所示 B. 加速度分析○1求akA4A3 ak2A4A3=2ω4V A4A3= m/s 方向如速度图所示○2求aA3 a2A3= aA2=ω2×L02A=/s2 9 作速度多边形用速度影像法求VB辽宁工业大学课程设计说明书 3 anA4 anA4=ω32×L03A=/s2○4求Aa4○→ → →→→ anA4 + atA4 = aA3+ akA4A3+ arA4A3大小:√ ?√?方向A→O3 ⊥AO3 √ 如图∥O3A 5取μa =(m/s2)/mm画加速度多边形:○ 6 求aB如图所示用加速度影象法求aB=31m/s2○7求AF ○→ → →→ aF = aB + anFB + atFB 大小:?31 Vfb2/LFB ?方向:水平√ F→B ⊥BF 8接着画加速度多边形,加速度多边形求得:aF =p,f,×μa=/s2○收集同组同学的位移、速度、加速度的数据并汇编如下页表:曲柄位名称 1 0 0 72 83944’ 5 - 11 - 6 - 12 - SF VF AF 曲柄位名称- 10 10’SF VF AF - - - - - - - - 10 辽宁工业大学课程设计说明书刀头运动曲线:SfUs=== 五、机构的动态静力分析已知:m6=58Kg m4=15Kg 导杆绕重心的转动惯量JS4=切削主力为常数大小为Fc=1300N 确定惯性力、惯性力矩第7点PI6=-m6*aF=-58*-=493N11 辽宁工业大学课程设计说明书PI4= -m4*aS=-15*=-MI4=-JS4*α4=-*-/= h= MI4/ PI4=/=第12点PI6=-m6*aF=-58*31=-PI4= -m4*aS=-15*=-MI4=-JS4*α4=-*/=-28NM h= MI4/ PI4=28/=将计算结果汇总在如下表中曲柄位置7点12点- - -28 493 - 导杆 4 PI4 MI4 h 刨头PI6 2、确定齿轮2的重量查指导书得齿轮2的重量G2=500N 3、确定各运动副反力第7点:A、取构件5、6为示力体在机构位置图上方绘制示力体图比例尺为:μ→→→L=/mm →→R45+R76+PI6+G6+FC=0 上式中只有R45、R76的大小未知取力比例尺:μp=FC/ab=20N/mmp在机构位置图下面画力多边形大致图形如图,求得:R45=de*μ=42*20 =840N12 辽宁工业大学课程设计说明书方向与力多边形中de的方向一致R76=ea*μ ?MFp=20*32=640N 方向:垂直导路上=0 FC+G6Xx6= R76h76 h76= [FC+G6Xx6]/ R76B、取构件3、4为示力体:在机构位置图右侧绘制示力体图比例尺为μ→→→L=/mm →?????R54+G4 +R23+PI4 +R74=0 o3?M=0R23LO3+PI4 hP+ G4h4= R54h54 量得h4= hp= m h54= R23=(R54h54-P14’hp-G4h4)/LO3A=1140N矢量式中R74的大小和方向未知仍取力比例尺μp=20N/M p接着力比例尺多边形图,求得:R74=he*μ方向与力多边形中he的方向一致C、取构件2为示力体在机构位置图右下方绘示力体图比例尺为:μ→→→L=28*20=560N =/mm→R32+R72+Pb+G2=0 ?M O2 =0(确定R23的大小):R32h32=Pbrb 13 辽宁工业大学课程设计说明书r量得:h32= b= PbR32h32rb=/=617N式中R72的大小和方向未知仍然取比例尺?P=20N/m接着画力多边形图,求得:R72ij?P=×=60×20=1200N方向与力多边形中ij的方向一致第12点:A、取构件5、6为示力体在机构位置图十方绘制势力题示力体图,比例尺为?L=/mm????G6PI6R45R 76+++=0 ??RR上式中只有45、76的大小未知取比例尺?P= FC/ab=20N/mmR45=cd*μR76=ad*μ ?MFp=1800N方向与力多边形中cd的方向一致=660N方向:垂直导路上p=0 FC+G6Xx6= R76h76h76= [FC+G6Xx6]/ R76 = B、取构件3、4为示力体在机构位置图右侧绘制示力体图比例尺为μ→L=/mm R54+G4 +R23+PI4 =0 o3→→→?M=0 R23LO3+PI4 hP+ G4h4= R54h54 R23=(R23h54-P14’hp-G4h4)/LO3A =4640N14辽宁工业大学课程设计说明书矢量式中R74的大小和方向未知仍取力比例尺μ接着力比例尺多边形图,求得:R74=gf*μpp=20N/M=2740N 方向与力多边形中fg的方向一致C、取构件2为示力体在机构位置图右下方绘示力体图比例尺为:μ=/mm????RPR其平衡方程为32+b+G2+72=0L?MO2=0:R32h32Pbrb+= 量得:h32rPRhr= b= b=3232/b=1160N R72上式中只有的大小和方向未知仍然取比例尺?P=20N/m接着画力多边形图,求得:R72=id×?P=210×20=4200N方向与力多边形中id的方向一致4、将各运动副反力汇总如下:位置指定的两个位置反力第7点1200 560 620 8201140 1140 第12点4180 2700 660 18204640 4640 ?R72R74?R76?R45R34R23 15 辽宁工业大学课程设计说明书5、计算平衡力偶矩并汇总如下:曲柄位置Mb 曲柄位置Mb 7 98 8 -50 9 176 10 596 11 -380 12 -378 1 0 2 210 3 285 4 284 5 246 6 188 6、绘制平衡力偶矩曲线#Mb?2-该曲线在1图纸右上角六、飞轮设计已知:许用速度不均匀系数[δ]=1/40平衡力矩曲线Mb-δ2驱动力矩为常数曲柄的转数n2=80rpm飞轮装在齿轮Z1的O1轴上1、作等效阻力矩曲线Mr-δr 于飞轮准备装在Z1的O1轴上,因此|Mr|=|Mb/i12|可Mb-δ2曲线直接画出Mr-δ1曲线。