Classical control theory 经典控制理论 精美英文PPT
- 格式:ppt
- 大小:2.65 MB
- 文档页数:16
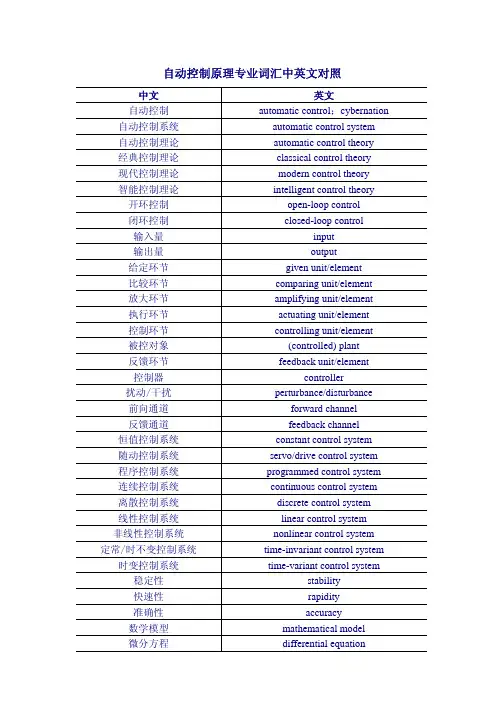
自动控制原理专业词汇中英文对照中文 英文自动控制 automatic control;cybernation 自动控制系统 automatic control system自动控制理论 automatic control theory经典控制理论 classical control theory现代控制理论 modern control theory智能控制理论 intelligent control theory 开环控制 open-loop control闭环控制 closed-loop control输入量 input输出量 output给定环节 given unit/element比较环节 comparing unit/element放大环节 amplifying unit/element执行环节 actuating unit/element控制环节 controlling unit/element被控对象 (controlled) plant反馈环节 feedback unit/element控制器 controller扰动/干扰 perturbance/disturbance前向通道 forward channel反馈通道 feedback channel 恒值控制系统 constant control system随动控制系统 servo/drive control system 程序控制系统 programmed control system 连续控制系统 continuous control system离散控制系统 discrete control system线性控制系统 linear control system非线性控制系统 nonlinear control system定常/时不变控制系统 time-invariant control system 时变控制系统 time-variant control system 稳定性 stability快速性 rapidity准确性 accuracy数学模型 mathematical model微分方程 differential equation非线性特性 nonlinear characteristic线性化处理 linearization processing泰勒级数 Taylor series传递函数 transfer function比例环节 proportional element积分环节 integrating element一阶惯性环节 first order inertial element二阶惯性环节 second order inertial element二阶震荡环节 second order oscillation element 微分环节 differentiation element一阶微分环节 first order differentiation element二阶微分环节 second order differentiation element 延迟环节 delay element动态结构图 dynamic structure block串联环节 serial unit并联环节 parallel unit信号流图 signal flow graph梅逊增益公式 Mason’s gain formula时域分析法 time domain analysis method性能指标 performance index阶跃函数 step function斜坡函数 ramp function抛物线函数 parabolic function /acceleration function 冲击函数 impulse function正弦函数 sinusoidal function动态/暂态响应 transient response静态/稳态响应 steady-state response 延迟时间 delay time上升时间 rise time峰值时间 peak time调节时间 settling time最大超调量 maximum overshoot稳态误差 steady-state error无阻尼 undamping欠阻尼 underdamping过阻尼 overdamping特征根 eigen root极点 pole零点 zero实轴 real axis虚轴 imaginary axis 稳态/静态分量 steady-state component瞬态/暂态/动态分量 transient component 运动模态 motion mode衰减 attenuation系数 coefficient初相角 initial phase angle响应曲线 response curve主导极点 dominant pole 劳斯稳定判据 Routh stability criterion S平面 S plane胡尔维茨稳定判据 Hurwitz stability criterion 测量误差 measurement error扰动误差 agitation error结构性误差 structural error偏差 deviation根轨迹 root locus 常规根轨迹 routine root locus根轨迹方程 root locus equation 幅值 magnitude幅角 argument对称性 symmetry分离点 separation/break away point会合点 meeting/break-in point渐近线 asymptote出射角 emergence angle/angle of departure入射角 incidence angle/angle of arrival 广义根轨迹 generalized root locus零度根轨迹 zero degree root locus 偶极子 dipole/zero-pole pair 频域分析法 frequency-domain analysis method 频率特性 frequency characteristic极坐标系 polar coordinate system直角坐标系 rectangular coordinate system幅频特性 magnitude-frequency characteristic相频特性 phase-frequency characteristic 幅相频率特性 magnitude-phase frequency characteristic 最小相位系统 minimum phase system非最小相位系统 nonminimum phase system奈奎斯特稳定判据 Nyquist stability criterion 伯德定理 Bode theorem稳定裕度 stability margin幅值裕度 magnitude margin 相位/相角裕度 phase margin对数幅频特性 log magnitude-frequency characteristic 无阻尼自然震荡角频率 undamped oscillation angular frequency 阻尼震荡角频率 damped oscillation angular frequency 阻尼角 damping angle带宽频率 bandwidth frequency 穿越/截止频率 crossover/cutoff frequency 谐振峰值 resonance peak系统校正 system compensation超前校正 lead compensation滞后校正 lag compensation自激震荡 self-excited oscillation死区特性 dead zone characteristic饱和特性 saturation characteristic间隙特性 backlash characteristic描述函数法 describing function method相平面法 phase plane method 采样控制系统 sampling control system数字控制系统 digital control system频谱 frequency spectrum 采样定理 sampling theorem信号重现 signal recurrence拉氏变换 Laplace transformZ变换 Z transform终值定理 final-value theorem差分方程 difference equation迭代法 iterative method 脉冲传递函数 pulse transfer function零阶保持器 zero-order holder映射 mapping方框图 block diagram伯德图 Bode diagram特征方程 characteristic equation可控性 controllability临界阻尼 critical damping阻尼常数 damping constant阻尼比 damping ratio初始状态 initial state初值定理 initial-value theorem反Z变换 inverse Z-transformation负反馈 negative feedback正反馈 positive feedback 尼科尔斯图 Nichols chart部分分式展开 partial fraction expansion 幅角原理 argument principle相对稳定性 relative stability共振频率 resonant frequency劳斯表 Routh tabulation/array奇点 singularity渐进稳定性 asymptotic stability控制精度 control accuracy临界稳定性 critical stability耦合 coupling解耦 decoupling比例积分微分调节器 proportional integral derivative regulator(PID) 串联校正 series/cascade compensation 单输入单输出 single input single output(SISO)多输入多输出 multi input multi output(MIMO)低通滤波器 low pass filter非线性系统 nonlinear system复合控制 compound control衰减振荡 damped oscillation主反馈 monitoring feedback 转折(交接)频率 break frequency稳定焦点/节点 stable focus/node。
附录Ⅲ 控制理论术语中英文对照表AAbsolute error 绝对误差Accuracy 精确度Active electric network 有源网络Actuating signal 作用信号,启动信号Actuator 执行机构,调节器,激励器Adjust 调整Adaptive control 自适应控制Amplitude 振幅,幅值Analog computer 模拟计算机Analog signal 模拟信号Angle condition 相角条件Angle of arrival 入射角Angle of departure 出射角Angular acceleration 角加速度Argument 辐角Asymptote 渐近线Asymptotically stable 渐近稳定的Automatic control 自动控制Attenuation 衰减Auxiliary equation 辅助方程BBacklash 间隙,回差Bandwidth 带宽Bang-bang control 砰-砰控制,继电控制Biocybernetics 生物控制论Block diagram 方框图,方块图,结构图Bode plot 波特图Breakaway-points 分离点CCAD(computer aided design) 计算机辅助设计Cascade compensation 串联补偿(校正)Cascade control 串级控制Channel 通道Characteristic equation 特征方程Classical control theory 古典控制理论Closed loop control system 闭环控制系统Closed loop frequency response 闭环频率响应Closed loop pole 闭环极点Closed loop zero 闭环零点Combinational control system 复合控制系统Comparator 比较器Comparing element 比较元件,比较环节Compound control 复合控制Compensation 补偿,校正Complex plane 复平面Conditional stability 条件稳定Configuration 结构,配置,方案,组态Constant M loci 等M圆Continuous system 连续系统Controlled variable 被控变量Control system 控制系统Control valve 调节阀Controllability 可控性,能控性Corner frequency 转折频率,交接频率Correcting unit 校正器Correction 校正Coupling 耦合Criterion 判据,准则Critical damping 临界阻尼Cut-off frequency 截止频率Cybernetics 控制论DDamped natural frequency 有阻尼自然频率Damper 阻尼器Damping factor 阻尼系数Damping ratio 阻尼比Dead band 死区Dead time 纯延迟,延迟时间Decomposition 分解Delay 滞后Delay element 滞后环节Derivation action 微分作用Derivative control 微分控制Desired value 预期值,期望值Deviation 偏差Differencing junction 比较点Differential equations 微分方程Digital computer 数字计算机Discrete-data system 离散数据系统Disturbance 扰动,干扰Dominant pole 主导极点Duality 对偶性Dynamic equation 动态方程Dynamic error 动态误差Dynamic process 动态过程EEquilibrium state 平衡状态Eigenvalue 特征值Eigenvector 特征向量Error 误差Error coefficient 误差系数Error signal 误差信号Even symmetry 偶对称Exponential 指数,指数的,幂的Extremum 极值FFeedback 反馈Feedback control 反馈控制Feedback element 反馈环节Feedback path 反馈通道Feedforward 前馈Final value 终值First-order system 一阶系统Forward path 前向通道Frequency 频率Frequency domain 频域Frequency response 频率响应Frequency response characteristic 频率响应特性GGain 增益Gain margin 增益裕度,幅值裕度HHarmonic response 谐波响应Holder 保持器Homogeneous equation 齐次方程Hurwitz determinant 赫尔维茨行列式Hysteresis error 回差IIdealized system 理想化系统Identification 辨识Impulse response 脉冲响应Inertial 惯性的,惯量的,惰性的Inherent characteristic 固有特性Initial condition 初始条件Initial state 初始状态Initial value theorem 初值定理Inner loop 内环Input 输入Input node 输入节点Input signal 输入信号Integral action 积分作用Integral control 积分控制Internal description 内部描述Inverse matrix 逆矩阵Inverse transformation 反变换Inverse Laplace transforms 拉普拉斯反变换Isocline method 等倾线法Iterative algorithm 迭代算法JJordan block 约当块Jordan canonical form 约当标准型KKalman criterion 卡尔曼准则Kalman filter 卡尔曼滤波器LLag network 滞后网络Lag compensation 滞后补偿Laplace transforms 拉普拉斯变换Large scale system 大系统Lead network 超前网络Limit cycle 极限环Linearization 线性化Linearity 线性度Linear equation 线性方程Linear system 线性系统Load-response curve 负荷响应曲线Locus 轨迹Log magnitude 对数幅值Low pass characteristic 低通特性MMagnitude condition 幅值条件Magnitude-Versus-Phase plot 幅值特性曲线Manipulated variable 操纵变量Mason rule 梅森公式Mathematical model 数学模型Matrix 矩阵Maximum overshoot 最大超调量Measurable 可测量的Measured variable 被测变量Minimum phase system 最小相位系统Model decomposition 模型分解Modulus 模Moment of inertia 转动惯量Multinomial 多项式(的)Multivariable system 多变量系统NNatural frequency 自然频率Negative feedback 负反馈Nichols chart 尼柯尔斯图线Node 节点Noise 噪声Nonlinear control system 非线性控制系统Nonminimum phase system 非最小相位系统Nonsingular 非奇异的Norm 范数Numerical control 数字控制Nyquist criterion 奈奎斯特判据Nyquist contour 奈奎斯特轨线OObjective function 目标函数Observability 可观性,能观性Observer 观测器Odd symmetry 奇对称Offset 偏移,位移Open loop 开环Optimal control 最优控制Optimization 最优化Origin 原点Oscillation 振荡Oscillatory response 振荡响应Outer loop 外环Output 输出Output signal 输出信号Over damping 过阻尼Overshoot 超调量PParameter 参数Peak overshoot 超调峰值Peak time 峰值时间Performance index 性能指标Phase lag 相位滞后Phase lead 相位超前Phase margin 相角裕度Phase plane 相平面Pickoff point 引出点PID(proportional plus integral plus derivative) PID(比例、积分、微分)控制器Piece-wise linearization 分段线性化Pole 极点Pole assignment 极点配置Polynomial 多项式Position error 位置误差Positive definiteness 正定性Pre-compensator 预补偿器Process control 过程控制Proportional band 比例带Proportional control 比例控制Pulse 脉冲Pulse width 脉宽Pure delay 纯滞后RRamp input 斜坡输入Ramp response 斜坡响应Rate feedback 速度反馈Rate time 微分时间,预调时间Rational 有理(数)的,合理的Realization 实现Reference variable 参考变量Regulator 调节器Relative stability 相对稳定Reliability 可靠性Response 响应Reset time 再调时间,积分时间Residue 留数Rise time 上升时间Roots loci 根轨迹Routh-Hurwitz criterion 劳斯-赫尔维茨判据Routh stability criterion 劳斯稳定判据SSampling control 采样控制Sampling freqency 采样频率Sampling period 采样周期Series compensation 串联补偿Servo 伺服机构,伺服电机Servodrive 伺服传动,伺服转动装置Set value 设定值Settling time 调节时间,稳定时间Signal flow graph 信号流图Singular point 奇点Stability 稳定(性)Stability margin 稳定裕度State equations 状态方程State space 状态空间State variables 状态变量Steady-state 稳态的Stationary 稳态Steady-state deviation 稳态偏差Steady-state error 稳态误差Step singal 阶跃信号Step response 阶跃响应Stochastic process 随机过程Summing junction 相加点Superposition 叠加Systematic deviation 系统偏差System identification 系统辨识TTangent 切线Threshold value 阈值Time constant 时间常数Time domain 时域Time response 时间响应Time-invariant system 常定(时不变)系统Time-varying system 时变系统Trajectory 轨迹Transducer 传感器,变换器Transfer function 传递函数Transfer matrix 转移矩阵Transient response 暂态响应Transmitter 变送器Transportation lag 传输滞后UUndamped natural frequency 无阻尼自然频率Underdamping 欠阻尼Uniform stability 一致稳定Unit circle 单位圆Unit impulse 单位脉冲Unit step function 单位阶跃函数Unity feedback 单位反馈Unity matrix 单位矩阵Unstable 不稳定的Asymmetrical 不对称的VValue of quantity 量值variable 变量Vector 向量Velocity feedback 速度反馈WWaveform 波形Weighting function 加权函数White noise 白噪声ZZero 零点Zero input response 零点输入响应Zero-order holder 零阶保持器Zero-state response 零状态响应Z-transfer function Z传递函数Z-transformation Z变换。
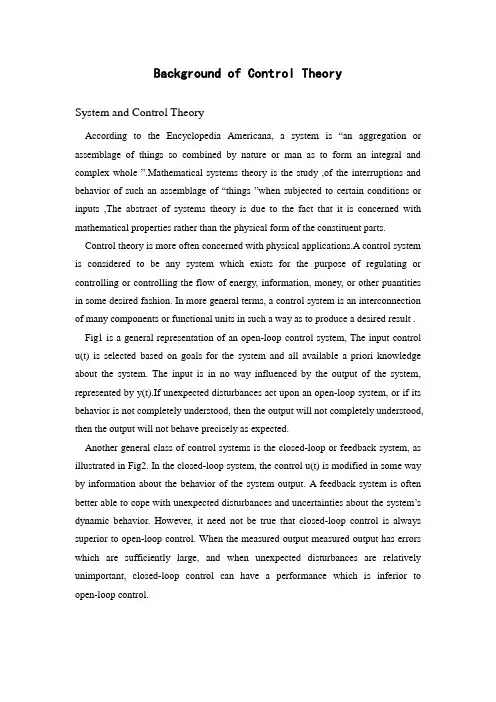
Background of Control TheorySystem and Control TheoryAccording to the Encyclopedia Americana, a system is “an aggregation or assemblage of things so combined by nature or man as to form an integral and complex whole ”.Mathematical systems theory is the study ,of the interruptions and behavior of such an assemblage of “things ”when subjected to certain conditions or inputs ,The abstract of systems theory is due to the fact that it is concerned with mathematical properties rather than the physical form of the constituent parts.Control theory is more often concerned with physical applications.A control system is considered to be any system which exists for the purpose of regulating or controlling or controlling the flow of energy, information, money, or other puantities in some desired fashion. In more general terms, a control system is an interconnection of many components or functional units in such a way as to produce a desired result . Fig1 is a general representation of an open-loop control system, The input control u(t) is selected based on goals for the system and all available a priori knowledge about the system. The input is in no way influenced by the output of the system, represented by y(t).If unexpected disturbances act upon an open-loop system, or if its behavior is not completely understood, then the output will not completely understood, then the output will not behave precisely as expected.Another general class of control systems is the closed-loop or feedback system, as illustrated in Fig2. In the closed-loop system, the control u(t) is modified in some way by information about the behavior of the system output. A feedback system is often better able to cope with unexpected disturbances and uncertainties about the system’s dynamic behavior. However, it need not be true that closed-loop control is always superior to open-loop control. When the measured output measured output has errors which are sufficiently large, and when unexpected disturbances are relatively unimportant, closed-loop control can have a performance which is inferior to open-loop control.Fig1 An Open-loop Control SystemIntroduction to Modern Control TheorySeveral factors provided the stimulus for the development of modern control theory:(a)The necessity of dealing with more realistic models of systems.(b)The shift in emphasis towards optimal control and optimal systemdesign.(c)The continuing developments in digital computer technology.(d)The shortcomings of previous approaches.(e) A recognition of the applicability of well-known methods in other fieldsof knowledge.The transition from simple approximate models, which are easy to work with, to more realistic models produces two effects. First, a larger number of variables must be included in the model. Second, a more realistic model is more likely to contain nonlinearities and time-varying parameters. Previously ignored aspects of the system, such as interactions and feedback through the environment, are more likely to be included.With an advancing technological society, there is a trend towards more ambitious goals. This also means dealing with complex systems with a larger number of interacting components. The need for greater accuracy and efficiency has changed the emphasis on control system performance. The classical specifications in terms of percent overshoot, settling tome, bandwidth, etc. , have in many cases given way to optimal criteria such as minimum energy, minimum cost , and minimum timeoperation. Optimization of these criteria makes it even more difficult to avoid dealing with unpleasant nonlinearities. Optimal control theory often dictates that nonlinear time0-varying control laws be used, even if the basic system is linear and time-invariant.The continuing advances in computer technology have had three principal effects on the controls field. One of these relates to the gigantic supercomputers. The size and class of problems that can now be modeled, analyzed, and controlled are considerably larger than they were when the fist of this book was written.The second impact of computer technology has to do with the proliferation and wide availability of microcomputers in homes and in the work place. Classical control theory was dominated by graphical methods because at the time that was the only way to solve certain problems. Now every control designer has easy access to powerful computer packages for system analysis and designer. The old graphic methods have not yet disappeared, but have been automated. They survive because of the insight and intuition that they can provide. However, some different techniques are often better suited to a computer. Although a computer can be used to carry out the classical transform-inverse transform methods, it is usually more efficient for a computer to integrate differential equations directly.The third major impact of computer is that they are now so commonly used as just another component in the control system. Their cost, size and reliability make it possible to use them routinely in many systems. This means that the discrete-time and digital system control now deserves much more attention than it did in the past. Modern control theory is well suited to the above trends because its time-domain techniques and its mathematical language (matrices, linear vector space, etc.) are ideal when dealing with a computer. Computers are a major reason for the existence of state variable methods.Most classical control techniques were developed for linear constant coefficient systems with one input and one output (perhaps a few inputs and outputs). The language of classical techniques is the Laplace or z-transform and transfer functions. When nonlinearities and time variations are present, the very basic for these classical techniques is removed. Some successful techniques such as phase-plane methods,describing functions, and other ad hoc methods, have been developed to alleviate this shortcoming. However, the greatest success has been limited to low-order systems. The state variable approach of modern control theory provides a uniform and powerful method of representing systems of arbitrary order, linear or .nonlinear, with time-varying or constant coefficients. It provides an ideal formulation for computer implementation and is responsible for much of the progress in optimization theory. Modern control theory is a recent development in the field of control. Therefore, the name is justified at least as a descriptive title. However, the foundation of modern control theory is to be found in other well-established fields. Representing a system in terms of state variables is equivalent to the approach of Hamiltonian mechanics, using generalized coordinates and generalized momenta. The advantages of this approach have been well-known in classical physics for many years. The advantages of using matrices when deal with simultaneous equations of various kinds have long been appreciated in applied mathematics. The field of linear algebra also contributes heavily to modern control theory. This due to the concise notation, the generality of the results, and the economy of thought that linear algebra provides.Fig2 A Closed-Loop Errors控制理论基础系统及控制理论按照美国大百科全书的解释,所谓系统就是指“一个各种物体的集合,根据其性质或人的愿望而结合起来的以至形成一个集中、复杂的整体”。
自动控制原理专业词汇中英文对照自动控制原理专业词汇中英文对照中文英文自动控制automatic control;cybernation 自动控制系统automatic control system自动控制理论 automatic control theory经典控制理论 classical control theory现代控制理论 modern control theory智能控制理论intelligent control theory 开环控制open-loop control闭环控制 closed-loop control输入量 input输出量 output给定环节 given unit/element比较环节 comparing unit/element放大环节 amplifying unit/element执行环节 actuating unit/element控制环节 controlling unit/element被控对象 (controlled) plant反馈环节 feedback unit/element控制器 controller扰动/干扰 perturbance/disturbance前向通道 forward channel反馈通道feedback channel 恒值控制系统constant control system随动控制系统servo/drive control system 程序控制系统programmed control system 连续控制系统continuous control system离散控制系统 discrete control system线性控制系统 linear control system非线性控制系统 nonlinear control system定常/时不变控制系统time-invariant control system 时变控制系统 time-variant control system 稳定性 stability快速性 rapidity准确性 accuracy数学模型 mathematical model微分方程 differential equation非线性特性 nonlinear characteristic线性化处理 linearization processing泰勒级数 Taylor series传递函数 transfer function比例环节 proportional element积分环节 integrating element一阶惯性环节 first order inertial element二阶惯性环节 second order inertial element二阶震荡环节second order oscillation element 微分环节differentiation element一阶微分环节 first order differentiation element二阶微分环节 second order differentiation element 延迟环节delay element动态结构图 dynamic structure block串联环节 serial unit并联环节 parallel unit信号流图 signal flow graph梅逊增益公式Mason’s gain formula时域分析法 time domain analysis method性能指标 performance index阶跃函数 step function斜坡函数 ramp function抛物线函数 parabolic function /acceleration function 冲击函数impulse function正弦函数 sinusoidal function动态/暂态响应 transient response静态/稳态响应 steady-state response 延迟时间 delay time上升时间 rise time峰值时间 peak time调节时间 settling time最大超调量 maximum overshoot稳态误差 steady-state error无阻尼 undamping欠阻尼 underdamping过阻尼 overdamping特征根 eigen root极点 pole零点 zero实轴 real axis虚轴 imaginary axis 稳态/静态分量 steady-state component 瞬态/暂态/动态分量transient component 运动模态motion mode衰减 attenuation系数 coefficient初相角 initial phase angle响应曲线 response curve主导极点 dominant pole 劳斯稳定判据 Routh stability criterion S平面 S plane胡尔维茨稳定判据Hurwitz stability criterion 测量误差measurement error扰动误差 agitation error结构性误差 structural error偏差 deviation根轨迹 root locus 常规根轨迹 routine root locus根轨迹方程 root locus equation 幅值 magnitude幅角 argument对称性 symmetry分离点 separation/break away point会合点 meeting/break-in point渐近线 asymptote出射角 emergence angle/angle of departure入射角incidence angle/angle of arrival 广义根轨迹generalized root locus零度根轨迹zero degree root locus 偶极子dipole/zero-pole pair 频域分析法frequency-domain analysis method 频率特性frequency characteristic极坐标系 polar coordinate system直角坐标系 rectangular coordinate system幅频特性 magnitude-frequency characteristic相频特性phase-frequency characteristic 幅相频率特性magnitude-phase frequency characteristic 最小相位系统minimum phase system非最小相位系统 nonminimum phase system奈奎斯特稳定判据Nyquist stability criterion 伯德定理Bode theorem稳定裕度 stability margin幅值裕度 magnitude margin 相位/相角裕度 phase margin对数幅频特性 log magnitude-frequency characteristic 无阻尼自然震荡角频率 undamped oscillation angular frequency 阻尼震荡角频率damped oscillation angular frequency 阻尼角damping angle带宽频率bandwidth frequency 穿越/截止频率crossover/cutoff frequency 谐振峰值 resonance peak系统校正 system compensation超前校正 lead compensation滞后校正 lag compensation自激震荡 self-excited oscillation死区特性 dead zone characteristic饱和特性 saturation characteristic间隙特性 backlash characteristic描述函数法 describing function method相平面法 phase plane method 采样控制系统 sampling control system数字控制系统 digital control system频谱 frequency spectrum 采样定理 sampling theorem信号重现 signal recurrence拉氏变换 Laplace transformZ变换 Z transform终值定理 final-value theorem差分方程 difference equation迭代法 iterative method 脉冲传递函数 pulse transfer function 零阶保持器 zero-order holder映射 mapping方框图 block diagram伯德图 Bode diagram特征方程 characteristic equation可控性 controllability临界阻尼 critical damping阻尼常数 damping constant阻尼比 damping ratio初始状态 initial state初值定理 initial-value theorem反Z变换 inverse Z-transformation负反馈 negative feedback正反馈 positive feedback 尼科尔斯图 Nichols chart部分分式展开partial fraction expansion 幅角原理argument principle相对稳定性 relative stability共振频率 resonant frequency劳斯表 Routh tabulation/array奇点 singularity渐进稳定性 asymptotic stability控制精度 control accuracy临界稳定性 critical stability耦合 coupling解耦 decoupling比例积分微分调节器proportional integral derivative regulator(PID) 串联校正 series/cascade compensation 单输入单输出 single input single output(SISO)多输入多输出 multi input multi output(MIMO)低通滤波器 low pass filter非线性系统 nonlinear system复合控制 compound control衰减振荡 damped oscillation主反馈 monitoring feedback 转折(交接)频率 break frequency 稳定焦点/节点 stable focus/node。
7Psyc 390 –Psychology of Learning Evidence•Increased response to the drug can be induced by changing the stimulus context were the drug was administered.•New environment does not elicit the CR opposite the drugs effect.8Psyc 390 –Psychology of LearningApplication•Take a drug in environment 1. (Hotel)•Develop tolerance•Move to a new environment (House)•Take the same amount of drug •But, get a drug overdose9Psyc 390 –Psychology of Learning Why?•The CS cues are different. So, don’t get the opposite effect.10Psyc 390 –Psychology of LearningRescorla –Wagner Model•Accommodates many criticisms that were encountered with other models of CC.11Psyc 390 –Psychology of Learning Rescorla –Wagner Model•Kamin assumed that surprise determined whether conditioning occurs.•Rescorla and Wagner extended thisassumption and said that surprise would also determine HOW MUCH conditioning occurs.•If surprised, should get lots of conditioning. •Tone followed by shock would get moreconditioning than if the shock was expected.12Psyc 390 –Psychology of LearningRescorla –Wagner Model•When CS and US are paired, anassociation is formed between them.•If repeated, the strength of theassociation increases until it stabilizes.Trials13Psyc 390 –Psychology of LearningThe Associative Strength is not Constant over Trials•At T-1 Get a lot of associative strength.•At T-2 Get less•Ultimately V approaches a stable value.•V represents the strength on each trial •V max is the asymptotic value of V •V increases on each trial until V m ax•Amount of conditioning on any trial willdepend on the difference between V and V max14Psyc 390 –Psychology of LearningRescorla –Wagner Model Expresses Four Basic Ideas•1. There is a maximum associative strengththat can develop between the CS and UCS.A.Maximum associative strength i sdetermined by the UCS.B.Different UCS’s have different associativestrength.•2. Associative strength increases with eachlearning trial.However, the amount of associative strength that is gained on a particular trial is affected by the amount of previ ous training.Thus, more associative strength will accrue during early learning trials than later trials.15Psyc 390 –Psychology of LearningRescorla –Wagner Model Expresses Four Basic Ideas•3.The rate of conditioning is dependent onthe particular CSs and UCSs that are presented.a.Some stimuli develop rapid amounts ofassociative strength while other stimuli develop associative strength at slower rates.b.Some UCSs produce more rapid learningthan other UCSs.•4.The level of conditioning is dependent ona.The amount of learning pri or to conditioningof a stimulus, andb. The level of conditioning to stimulipreviously associated with the UCS.16Psyc 390 –Psychology of LearningThus•A particular UCS can only support a certain amount of conditioningregardless of how many stimuli are associated with it.AND•When several stimuli are presented, the stimuli must share the associative strength.17Psyc 390 –Psychology of Learning Rescorla –Wagner ModelThe model has three different constructs that are similar to the ones described above.•1.The strength of association ( V )between the CS and UCS controls the amount of conditioning displayed.•2.The maximum level ( λ) determinesthe strength the association can reach.•3.The rate of learning ( α) determineshow rapidly the limit can be reached.18Psyc 390 –Psychology of Learning∆Vn = C(Vmax -Vn )∆VN = αβ( λ-Vn )•C = αβ•α(alpha) which refers to the power of CSA and•β(beta) which refers to the intensity of the UCS•Vmax (λ)is solely determined by the UCS•defines the maximum level of conditioningsupported by a UCS.•the ∆Vn is the change in associative strength that develops on a particular trial.19Psyc 390 –Psychology of Learning∆Vn = C (Vmax -Vn )∆Vn = αβ( λ-Vn )Trial Vn ∆Vn = C(Vmax -Vn ) •10.00∆V1 = .30 (1-0.00) = 0.30•20.30∆V2 = .30 (1-0.30) = 0.21•30.51∆V3 = .30 (1-0.51) = 0.15•40.66∆V4 = .30 (1-0.66) = 0.1020Psyc 390 –Psychology of LearningPoints to Note and Problems•V represents the strength of a theoretical association. You can see dogs salivate, but you cannot directly observe the association presumed to produce the behavior.•E.g. if associati on strength was 10 how many drops of saliva would you expect to see.•You need to know the values of αand β(or C) before you can predict V.21Psyc 390 –Psychology of LearningPoints to Note and Problems•Used arbitrary values to test the model.•Their results showed that the model predicts a learning curve of the same general shape.•You cannot predict the exact number of saliva drops, but you can predict whether salivation will increase or decrease.。