商用车液压助力转向系统建模及整车转向操纵性能仿真_江浩斌
- 格式:pdf
- 大小:470.53 KB
- 文档页数:4
车辆工程虚拟仿真实验教学体系与平台的构建江浩斌;潘公宇;杨晓峰;耿国庆【摘要】The Virtual Simulation Experimental Teaching Center of Vehicle Engineering in Jiangsu University aims to strengthen students' professional foundation knowledge of vehicle dynamics,guide the students to explore the innovation of vehicle safety and new energy vehicle technology and strengthen their abilities of advanced manufacturing engineering.It puts the accredited idea of higher engineering education into practice,and establishes the advanced virtual-real experimental teaching system whichis guided by graduation requirements,covers the main vehicle engineering courses.Quick access for transforming scientific research achievements to virtual experiment resources is built.The teaching center forms the characteristics of advanced,serial and expandable experimentmodules,multidisciplinary coordination,resources sharing and wide scopeof impact.Moreover,the teaching center provides new modes and ideas for practical teaching and the innovative talent training in vehicle engineering.%江苏大学车辆工程虚拟仿真实验教学中心,以夯实学生的车辆动力学专业基础知识,引导学生探索车辆安全和新能源汽车技术创新,强化学生的先进制造工程能力为宗旨,践行工程教育专业认证理念,建立了以毕业要求为导向、涵盖车辆工程专业主干课程、虚实融合的先进实验教学体系,以及科研成果转化为虚拟实验资源的快速通道,形成了“实验模块先进、系列化、可拓展”“多学科协调参与、资源共享”“辐射范围广”等特点,为车辆工程专业的实践教学和创新型人才培养提供新的模式和理念.【期刊名称】《实验室研究与探索》【年(卷),期】2017(036)006【总页数】5页(P114-117,146)【关键词】虚拟仿真;教学体系;车辆工程【作者】江浩斌;潘公宇;杨晓峰;耿国庆【作者单位】江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013【正文语种】中文【中图分类】G642.0虚拟仿真实验教学是高等教育信息化建设和实验教学示范中心建设的重要内容,是学科专业与信息技术深度融合的产物[1-4]。
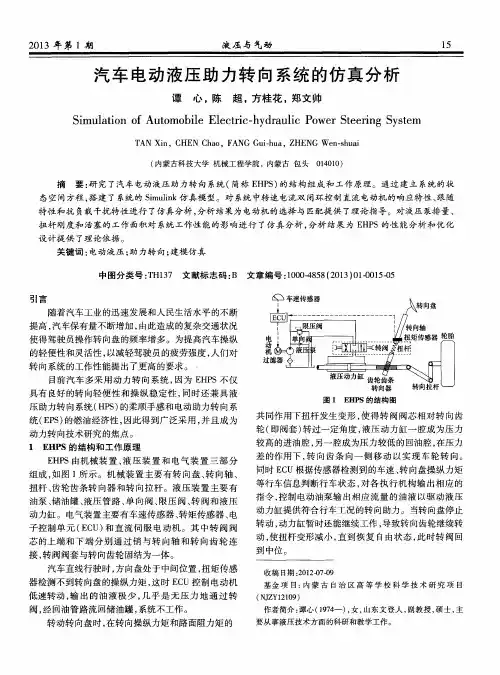
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!电动助力转向系统(Electronic Power Steering Sy stem ,EPS )是汽车电子化发展的成果之一,在各国汽车制造业中得到了普遍重视。
EPS 属于一种动力转向系统,比传统动力转向系统具有更高的可控性,能较好地解决汽车转向“轻”和“灵”的矛盾,因此有广泛的应用前景[1]。
对其进行性能仿真研究、建模及施加控制是两大关键问题[2]。
基于A DAMS 软件的虚拟样机技术,可把汽车视为一个由多个相互连接的、彼此能够相对运动的多体系统,其运动学及动力学仿真与以往通常用几个自由度的质量—阻尼刚体(振动)数学模型相比,计算描述能够更加真实地反映整车结构和整车性能,也比其他方法更为直接方便[3]。
由于EPS 控制运算法则的复杂性和整车模型的自由度过多这两个原因,造成仅仅使用一种软件进行基于整车的EPS 系统性能分析是比较困难的。
本文以某多功能商务车为对象,采用ADAM S/Car 建立整车系统多体动力学模型,在M atlab 中建立EPS 控制系统,应用M ATLAB 与ADAM S 软件相联合,将电动助力转向控制系统与整车模型相结合,采用时培成1,姜武华2(1.安徽工程科技学院机械系,芜湖241000;2.合肥工业大学机械与汽车学院,合肥230009)摘要:首先利用机械动力学仿真分析软件ADAMS 建立某多功能商务车整车多体动力学模型;其次在Matlab/S imulink 中设计了PID 控制的电动助力转向控制器,并定义了与ADAMS/Car 环境下车辆模型的数据交换接口;最后将设计的控制器在ADAMS /Car 和Matlab/Simulink 环境下通过输入输出接口实现联合迭代仿真,不断修正控制参数直到得到满意的控制效果。
仿真结果表明,所建立的模型和联合仿真的分析方法是正确的、有效的,为加快开发汽车EPS 系统的控制逻辑提供了理论参考。
电动助力转向控制系统的μ分析与综合
陈龙;袁朝春;江浩斌
【期刊名称】《江苏大学学报(自然科学版)》
【年(卷),期】2007(028)006
【摘要】在建立电动助力转向系统数学模型的基础上,考虑汽车电动助力转向控制系统设计中存在的参数摄动以及车辆行驶过程中路面高频、传感器测量噪声干扰的影响,在Matlab的μ分析与综合控制箱内,应用线性分式变换理论对模型中的参数摄动进行线性分式变换处理,并合理地选取系统中的相关权函数,构造电动助力转向系统的μ综合控制设计框架,采用D-K迭代算法求解了μ控制器.μ计算分析表明,所设计的μ控制器能够有效地抑制系统参数摄动及外界噪声干扰,与基于名义模型设计的H∞控制器相比,其闭环系统具有更好的性能鲁棒性和鲁棒稳定性.
【总页数】4页(P473-476)
【作者】陈龙;袁朝春;江浩斌
【作者单位】江苏大学,汽车与交通工程学院,江苏,镇江,212013;江苏大学,江苏省现代农业装备与技术重点实验室,江苏,镇江,212013;江苏大学,汽车与交通工程学院,江苏,镇江,212013;江苏大学,汽车与交通工程学院,江苏,镇江,212013
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.电液集成式液压提升机的电液速度伺服控制系统的分析与综合 [J], 彭佑多;余兵;高光辉;刘繁茂
2.模糊控制系统稳定性的分析与综合 [J], 吴忠强;许世范;岳东
3.一种改进的具有非理想网络状况的网络控制系统分析与综合方法 [J], 彭晨;田恩刚
4.考虑时延与丢包的网络控制系统分析与综合 [J], 陈刚;阳春华;朱红求
5.《网络控制系统的分析与综合》书评 [J], 徐胜元
因版权原因,仅展示原文概要,查看原文内容请购买。
液压动力转向器性能测试系统
尤田;姜涛;李会明;张桂林
【期刊名称】《机械工程师》
【年(卷),期】2015(000)004
【摘要】为了提高汽车液压动力转向系统的工作性能,文中建立了汽车液压动力转向器测试的试验系统,并介绍了对转向器性能测试系统的总体设计方案,利用压力、扭矩、角度和温度传感器检测系统性能状况,通过数据采集卡将采集到的信息及时反馈工控机,并应用LabVIEW软件开发平台对数据进行分析。
实现了对转向器性能的在线检测,为新型液压动力转向产品的研发奠定基础。
【总页数】3页(P33-34,35)
【作者】尤田;姜涛;李会明;张桂林
【作者单位】长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022
【正文语种】中文
【中图分类】U463.442
【相关文献】
1.循环球式液压动力转向器复合加载测试系统 [J], 杨文畅
2.汽车液压动力转向器测试系统 [J], 沈顺成;余敏
3.汽车液压动力转向器性能试验系统的加载方式探究 [J], 白雪峰
4.汽车液压动力转向器性能测试系统设计 [J], 钟绍俊;杨其华;张笑咏
5.汽车液压动力转向器测试系统的加载方法 [J], 何志锋;姜涛
因版权原因,仅展示原文概要,查看原文内容请购买。
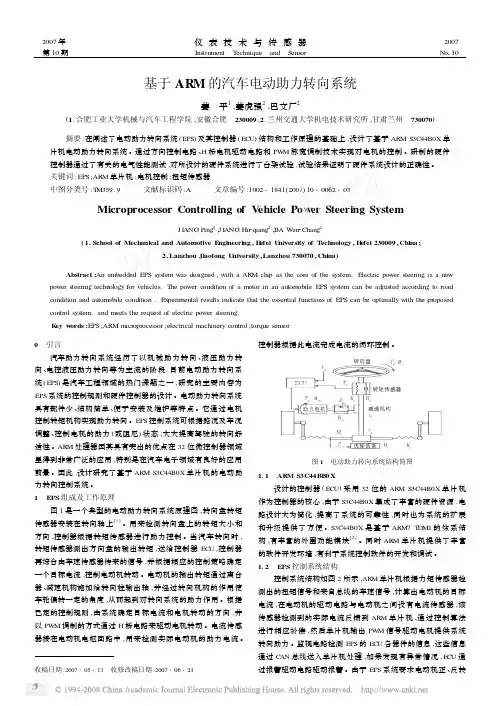
基于ARM的汽车电动助力转向系统姜 平1,姜虎强2,巴文厂2(1.合肥工业大学机械与汽车工程学院,安徽合肥 230009;2.兰州交通大学机电技术研究所,甘肃兰州 730070) 摘要:在阐述了电动助力转向系统(EPS)及其控制器(EC U)结构和工作原理的基础上,设计了基于ARM S3C44B0X单片机电动助力转向系统。
通过方向控制电路、H桥电机驱动电路和PW M脉宽调制技术实现对电机的控制。
研制的硬件控制器通过了有关的电气性能测试,对所设计的硬件系统进行了台架试验,试验结果证明了硬件系统设计的正确性。
关键词:EPS;ARM单片机;电机控制;扭矩传感器中图分类号:T M359.9 文献标识码:A 文章编号:1002-1841(2007)10-0062-03Microprocessor Controlling of V ehicle Pow er Steering SystemJ I ANG Ping1,J I ANG Hu2qiang2,BA Wen2Chang2(1.School of Mech anical and Automotive E ngineering,H efei U niversity of T echnology,H efei230009,China;nzhou Jiaotong U niversity,Lanzhou730070,China)Abstract:An embedded EPS system was designed,with a ARM chip as the core of the system.E lectric power steering is a new power steering technology for vehicles.The power condition of a m otor in an autom obile EPS system can be adjusted according to road condition and autom obile condition.Experimental results indicate that the essential functions of EPS can be optimally with the proposed control system.and meets the request of electric power steering.K ey w ords:EPS;ARM microprocess or;electrical machinery control;torque sens or0 引言汽车助力转向系统经历了以机械助力转向、液压助力转向、电控液压助力转向等为主流的阶段.目前电动助力转向系统(EPS)是汽车工程领域的热门课题之一,研究的主要内容为EPS系统的控制规则和硬件控制器的设计。
基于微分几何的E-ECHPS车辆转向稳定性控制唐斌;江浩斌;陈龙;耿国庆;尧骏【摘要】为了提高装备电控液压助力转向系统(E-ECHPS)的车辆高速紧急转向稳定性,提出了基于微分几何的线性参考模型反馈跟踪控制策略;建立了包括整车动力学模型、轮胎模型、转向系统模型和ESC模型的非线性动力学模型,通过整车试验和台架试验验证了模型的正确性;推导了系统的仿射非线性状态方程,考虑到轮胎、液压系统和ESC的非线性,运用微分几何理论对系统进行精确线性化得到输入输出伪线性系统;建立了包含转向系统的线性参考模型,为了实现对线性参考模型理想状态的跟踪,构造了反馈跟踪控制器;以方向盘转矩为输入进行了有控制和无控制下的阶跃转向仿真和单移线仿真,结果表明:施加反馈跟踪控制可以显著提高车辆在高速紧急转向工况下的操纵稳定性,为E-ECHPS系统的控制策略设计提供了理论依据.【期刊名称】《农业机械学报》【年(卷),期】2015(046)012【总页数】10页(P285-293,315)【关键词】车辆;电控液压助力转向系统;非线性动力学;线性化;微分几何;反馈跟踪控制【作者】唐斌;江浩斌;陈龙;耿国庆;尧骏【作者单位】江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013【正文语种】中文【中图分类】U463.4目前诸如农用运输车、中大型客车等前轴载荷大的车辆普遍采用助力特性单一的液压助力转向系统(HPS),HPS的助力特性设计完成后,其助力不能随车速的变化而变化,因而不能兼顾低速转向轻便性和高速转向路感,而且HPS的能耗较高[1]。
基于滑差离合器(ESC)的电控液压助力转向系统(E-ECHPS)通过控制转向泵的转速实现可变助力特性,同时避免了转向泵的溢流损失[2]。
某车液压助力转向系统动态特性的仿真
陈帆
【期刊名称】《机械传动》
【年(卷),期】2013(37)4
【摘要】为了分析某车齿轮齿条式液压助力转向系统的动态特性,建立了液压系统转向控制阀、转向液压缸及其他主要元件的数学模型。
采用SIMULINK对该系统进行分析,仿真模型以前轮受到交变载荷时产生的偏转角为输入,以转向液压缸输出力为输出。
仿真结果表明,当转角频率不变时,液压缸输出力随前轮转角幅值增大而增大;当转角幅值不变时,液压缸输出力随前轮转角频率增大而增大。
最后,为了改善液压助力转向系统的动态特性,分析了扭杆刚度、转向液压缸负载质量和液压系统的液体体积弹性模量对液压缸输出力的影响。
【总页数】5页(P55-59)
【关键词】液压助力转向;动态特性;交变载荷;仿真计算
【作者】陈帆
【作者单位】湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙410082【正文语种】中文
【中图分类】U469.11
【相关文献】
1.电动液压助力转向系统的助力特性曲线设计及仿真 [J], 朱佩;张振宇
2.丘陵山地拖拉机四轮转向同步液压系统动态特性仿真 [J], 冯雪;马文星;吕景忠;
才委
3.液压助力转向系统的动态特性研究 [J], 谭心;陈超;方桂花;郑文帅
4.新能源公交车电控液压助力转向系统仿真研究 [J], 李冰
5.某车液压助力转向系统的试验与仿真 [J], 郭孔辉;刘涛
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车电动转向系统反向助力控制策略仿真唐健;江浩斌;孙宣峰【期刊名称】《计算机仿真》【年(卷),期】2011(28)11【摘要】研究汽车转向系统优化控制问题,针对目前常用的正向助力控制策略不能有效控制电动转向进,汽车受侧向力干扰后操纵稳定性差,为提高EPS的抗侧向干扰性能,建立了侧向风作用下的整车转向动力学模型,分析了在侧向风干扰下EPS正向助力控制不足,提出了EPS反向助力控制策略,设计了反向助力特性,在Simulink中建立了EPS反向助力控制模型,进行了侧向风速为60km/h时三种车速工况下的EPS反向助力仿真.结果表明,在较大的侧向风干扰时,可抑制由正向助力引起的转向轮过度偏转,改善了EPS抗侧向干扰性能和整车横向稳定性,为进一步完善EPS控制策略设计提供了技术支持.%The stability of the vehicle with EPS under large crosswind disturbance cannot be handled effectively with positive power control strategy. In order to improve the resistibility of EPS under crosswind disturbance, the steering dynamic model of the vehicle was built, the shortage of EPS with positive power control strategy was analyzed , the reverse power control strategy of EPS was proposed and the reverse assist characteristic was designed. The model with reverse power control was built with Simulink, and the simulation was carried out at three different vehicle speeds while the velocity of crosswind was set at 60km/h. It is shown that the over deflection of tire caused by positive power is prevented with reverse power control strategy under large crosswinddisturbance, the resistibility of EPS is improved and the lateral stability of the vehicle is enhanced. The results of the research provide a technical support for the further design in control strategy of EPS.【总页数】5页(P306-310)【作者】唐健;江浩斌;孙宣峰【作者单位】江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013【正文语种】中文【中图分类】TP391【相关文献】1.汽车电动转向控制系统抗干扰策略的仿真 [J], 吴文江;杜彦良;季学武;陈奎元2.汽车电动转向系统基本助力电流特性设计研究 [J], 侯训波;杨启富;卢杰;汪超;刘丹;沈岱武3.基于Matlab的汽车电动转向系统助力特性仿真分析 [J], 付正飞;刘海生;吴何畏4.电动转向系统助力特性仿真研究 [J], 温立志;魏健;刘臣富5.汽车电助力转向系统仿真与控制策略研究 [J], 高永新;尚祖恩因版权原因,仅展示原文概要,查看原文内容请购买。
专利名称:一种人机共驾转向系统硬件在环仿真测试平台专利类型:发明专利
发明人:江浩斌,田欢,华一丁,马世典,耿国庆,唐斌,马莉,黄晨申请号:CN201710810477.X
申请日:20170911
公开号:CN107727417A
公开日:
20180223
专利内容由知识产权出版社提供
摘要:本发明公开了一种人机共驾转向系统硬件在环仿真测试平台,属于智能汽车转向系统仿真测试及其控制技术领域,该平台包括PC机、人机共驾转向ECU、驾驶模拟器、前置转矩/转角传感器、后置转矩/转角传感器、CAN卡、数据采集器,PC机分别与人机共驾转向ECU及驾驶模拟器相连,人机共驾转向ECU通过CAN卡与驾驶模拟器相连,CAN卡与数据采集器相连,前置转矩/转角传感器、后置转矩/转角传感器均与人机共驾转向ECU相连。
与现有技术相比,本发明具有人驾和机驾两种模式,从而控制转向电机的输出转角和转矩,监控机驾模式下转向系统的转角和转矩,保证转矩/转角信号的同步性,有效避免实车试验中易出现的危险情况,同时减少实车试验次数,降低节省开发费用。
申请人:江苏大学
地址:212013 江苏省镇江市京口区学府路301号
国籍:CN
更多信息请下载全文后查看。
液压助力转向泵模拟加载装置测控系统开发
牟一今;滕勤;温吉辉;王善强
【期刊名称】《车用发动机》
【年(卷),期】2016(000)003
【摘要】为了在发动机台架试验中能够按照试验规范控制液压助力转向泵的载荷,研制了转向泵模拟加载装置测控系统.该系统由基于16位微控制器的测控单元、伺服驱动器和工控机组成,利用以太网实现上、下位机通信,实时测量油压、油温和转向阻力等参数,根据获取的发动机台架控制系统试验开始标志来保持时间同步,通过控制机械转向器的转角来调节转向泵的载荷.试验结果表明,测控系统完全满足发动机试验中对转向泵连续加载要求.
【总页数】5页(P88-92)
【作者】牟一今;滕勤;温吉辉;王善强
【作者单位】合肥工业大学机械与汽车工程学院 ,安徽合肥 230009;合肥工业大学机械与汽车工程学院 ,安徽合肥 230009;合肥工业大学机械与汽车工程学院 ,安徽合肥 230009;安徽江淮汽车股份有限公司技术中心 ,安徽合肥 230601
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.基于LabVIEW软件的电动液压助力转向台架测控系统设计 [J], 解后循;高翔;夏长高
2.车辆液压助力转向泵故障模拟实验 [J], 朱诗顺;欧阳熙;朱道伟;杨钢
3.汽车液压助力转向器计算机测控系统的研究 [J], 黄成祥;吴军;黄强
4.一种电子液压助力转向泵试验台的开发 [J], 王宪科;宋志才;王建磊;韩彬;刘运来
5.基于预测控制的汽车主动悬架与电控液压助力转向系统的集成控制 [J], 高翔;缪丰隆
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车电动助力转向控制器驱动电路可靠设计
赵景波;陈龙;江浩斌
【期刊名称】《农业机械学报》
【年(卷),期】2008(39)11
【摘要】分析了电动助力转向系统的工作原理及控制器可靠设计的关键技术.EPS 控制器的模块化设计将信号处理电路和功率驱动电路进行分层设计,增强系统的抗干扰能力和可靠性;PWM驱动频率的选择要考虑与机械系统固有频率的关系、对电枢电流纹波的影响及对人的噪声影响,同时要考虑开关时电流脉峰对开关管及电动机安全的影响;3个MOS管的并联工作要考虑经济性、电路板空间与发热功耗、可靠性的关系;MOS管的散热设计通过合理地选择散热片及其参数,可以提高驱动效率和稳定运行能力.
【总页数】4页(P22-25)
【作者】赵景波;陈龙;江浩斌
【作者单位】江苏大学汽车与交通工程学院,镇江市,212013;江苏大学汽车与交通工程学院,镇江市,212013;江苏大学汽车与交通工程学院,镇江市,212013
【正文语种】中文
【中图分类】TP29;U463.4
【相关文献】
1.基于MC9S12XS128的汽车电动助力转向控制器 [J], 吴庆淼;刘振华;陈啸;李仁庆
2.电动助力转向系统电机驱动电路的设计 [J], 郝金魁;张超风
3.基于DSP的汽车电动助力转向系统控制器设计研究 [J], 何军;谢暄
4.汽车电动助力转向系统控制器设计 [J], 王廷宏;陆文昌
5.基于Freescale MC56F8346的汽车电动助力转向系统控制器开发 [J], 何泽刚;申荣卫;谢康;冯丽娜
因版权原因,仅展示原文概要,查看原文内容请购买。